Изобретение относится к авиационной технике, а именно - к устройству управления дроссельной заслонкой двигателя летательного аппарата, а более конкретно - к управлению подачей воздуха в авиационный поршневой двигатель.
Известна система управления сигналом дроссельной заслонки (см. заявку США 2020173374 по кл. МПК F02D9/02, опуб. 04.06.2020) транспортного средства, содержащая контроллер, имеющий многофункциональные порты ввода/вывода (например, один или несколько физических интерфейсов), которые могут принимать входные сигналы и отправлять выходные данные. Сигналы могут быть преобразованы из аналогового в цифровой или из цифрового в аналоговый. . Входными и выходными сигналами также можно управлять с помощью управляющей логики или процессора, выполняющего автоматизированные алгоритмы. Контроллер может принимать в качестве входа сигнал положения дроссельной заслонки от датчика дроссельной заслонки. Контроллер может передавать сигнал положения дроссельной заслонки в электронный блок управления в форме сигнала дроссельной заслонки. Электронный блок управления может управлять скоростью подачи топлива в двигатель внутреннего сгорания на основе сигнала дроссельной заслонки для управления мощностью генератора.
Однако, устройство предназначено для управления выходной мощностью генератора переменного тока и не может использоваться для регулирования частоты вращения или момента на выходном валу двигателя путём подачи воздуха. Для создания воздушно-топливной смеси необходимо использовать дополнительные программные или аппаратные алгоритмы внешнего электронного блока управления.
Известно устройство управления дроссельной заслонкой двигателя внутреннего сгорания самолёта (см. заявку Японии 2009013811 по кл. МПК F02D11/10, опуб.22.01.2009), содержащее электродвигатель для приведения в действие дроссельной заслонки. Вал дроссельной заслонки, который поддерживает её, прикреплён с возможностью вращения, и между стороной основного корпуса и стороной вала дроссельной заслонки предусмотрена возвратная пружина для приведения дроссельной заслонки в полностью открытое направление, когда электродвигатель не работает. Тем самым обеспечивается режим полного открытия дроссельной заслонки при аварии системы электропитания или отказе электронного устройства управления дроссельной заслонкой для обеспечения работы двигателя летательного аппарата.
Однако для устройства, обеспечивающего безопасность полёта летательного аппарата, в представленном устройстве отсутствует встроенная система контроля и низкая отказобезопасность, так как основной элемент управления - электродвигатель не резервирован, а датчик положения дроссельной заслонки отсутствует, как элемент.
Наиболее близким к заявляемому является устройство управления дроссельной заслонкой двигателя летательного аппарата, содержащее подключенный к заслонке электродвигатель, соединённый с одной стороны - с контроллером, с другой - с редуктором, датчик положения заслонки, подключенный к контроллеру (см. кн. «Бортовое радиоэлектронное оборудование летательных аппаратов»/А.Н. Попов, А.В. Майоров, Д.П. ТЕТЕРИН и др.; под ред. Д.П. Тетерина. - М.: Инновационное машиностроение, 2020 . - С. 211-212), содержащая корпус, электродвигатель, зубчатый цилиндрический редуктор, датчик положения заслонки, возвратный пружинный механизм. Управление электродвигателем в заслонке осуществляет микроконтроллер при помощи транзисторного силового коммутатора. Информация о текущем положении заслонки осуществляется с помощью бесконтактного датчика положения. Электронная часть дроссельной заслонки находится в отдельном от механической части отсеке.
Однако, конструкция не позволяет осуществлять достоверно непрерывный мониторинг технического состояния заслонки, так как микроконтроллер и датчик положения не резервированы, вследствие чего электронный блок управления не сможет принять верного решения о текущем состоянии дроссельной заслонки при ложном отказе или в спорной ситуации. Также отсутствие резервирования приведёт к невозможности пережить один однородный отказ и обеспечить дальнейшую работу двигателя летательного аппарата.
Технической проблемой заявляемого изобретения является создание устройства управления дроссельной заслонкой двигателя летательного аппарата, позволяющего обеспечивать непрерывный мониторинг технического состояния заслонки.
Техническим результатом является высокая надёжность, отказобезопасность и контролепригодность устройства управления дроссельной заслонкой
Для решения поставленной проблемы и заявляемого результата устройство управления дроссельной заслонкой двигателя летательного аппарата, содержащее электродвигатель, подключённый к контроллеру, соединённому с датчиком положения заслонки, соединённого с поворотным элементом, подключённым к возвратной пружине, согласно изобретению, содержит второй электродвигатель, подключённый ко второму контроллеру, соединённому со вторым датчиком положения заслонки, подключённого к поворотному элементу, два планетарных редуктора, суммирующий редуктор, два электрических соединителя и блок внешних соединителей и фильтров радиопомех , при этом один из электрических соединителей, электродвигатель, контроллер, планетарный редуктор и датчик положения заслонки образуют основной канал управления, а второй электрический соединитель, вторые электродвигатель, контроллер, планетарный редуктор и датчик положения образуют дублирующий канал управления, причём планетарные редукторы подключены к суммирующему редуктору, соединённому с возвратной пружиной, а контроллеры подключены к блоку внешних соединителей, связанному с электрическими соединителями.
Каждый из контроллеров состоит из модуля питания, модуля измерения напряжения, модуля внешнего интерфейса, вычислительного модуля, модуля преобразователя уровня сигнала, модуля управления питанием электродвигателя, модуля управления электродвигателем, модуля измерения тока потребления, при этом входы вычислительного модуля подключены к выходу блока электропривода, блока датчика положения, модулю измерения тока потребления и модулю внешних интерфейсов, один из выходов вычислительного модуля подключён к модулю преобразователя уровня сигнала, а другой выход - к модулю управления питанием электродвигателя, вход которого соединён с выходом модуля измерения тока потребления, вход которого соединён с выходом модуля управления электродвигателем, другой выход которого подключён ко входу блока электродвигателя, а другой вход модуля управления электродвигателем соединён с модулем питания и модулем измерения напряжения, модуль внешних интерфейсов соединён с блоком внешних соединителей и фильтров радиопомех.
Изобретение иллюстрируется чертежами, где представлено:
На фиг. 1 - структурная схема устройства управления дроссельной заслонки.
На фиг. 2 - схема внутреннего строения контроллера.
На фиг. 3 - логическая схема доказательства надёжности дроссельной заслонки
На чертежах позициями обозначено:
1 - электрический соединитель 1 канала
2 - электрический соединитель 2 канала
3 - блок внешних соединителей и фильтров радиопомех
4 - контроллер 1 канала
5 - контроллер 2 канала
6 - электродвигатель 1 канала
7 - электродвигатель 2 канала
8 - планетарный редуктор 1 канала
9 - планетарный редуктор 2 канала
10 - суммирующий редуктор
11 - возвратная пружина кручения
12 - поворотный элемент
13 -датчик положения поворотного элемента 1 канала
14 -датчик положения поворотного элемента 2 канала
15 - модуль питания контроллера
16 - модуль измерения напряжения контроллера
17 - модуль внешних интерфейсов контроллера
18 - вычислительный модуль контроллера
19 - модуль преобразователя уровня сигнала
20 - модуль управления питанием электродвигателя
21 - модуль управления электродвигателем
22 - модуль измерения тока потребления
Устройство содержит основной (первый) и дублирующий (второй) каналы управления. Каждый из каналов состоит из электрического соединителя, контроллера управления, электродвигателя, планетарного редуктора, датчика положения.
Основной (первый) канал содержит электрический соединитель 1, подключённый через блок внешних соединителей 3 к контроллеру 4, соединённому с датчиком положения поворотного элемента 13 и электродвигателем 6, подключённым к планетарному редуктору 8, соединённому с суммирующим редуктором 10, подключённым к возвратной пружине кручения 11.
Дублирующий (второй) канал также содержит электрический соединитель 2, подключённый через блок внешних соединителей 3 ко второму контроллеру 5, соединённому с датчиком положения поворотного элемента 14 и электродвигателем 7, подключённым к планетарному редуктору 9, соединённому с суммирующим редуктором 10, подключённым к возвратной пружине кручения 11.
Каждый из контроллеров (см. фиг. 2) состоит из модуля питания 15, модуля измерения напряжения 16, модуля внешнего интерфейса 17, вычислительного модуля 18, модуля преобразователя уровня сигнала 19, модуля управления питанием электродвигателя 20, модуля управления электродвигателем 21, модуля измерения тока потребления 22, при этом входы вычислительного модуля 18 подключены к выходу электродвигателя 6 (для 1 канала) и электродвигателя 7 (для 2 канала), датчику положения 13 (для 1 канала) и датчику положения 14 (для 2 канала), модулю измерения тока потребления 22 и модулю внешних интерфейсов 17, один из выходов вычислительного модуля 18 подключен к модулю преобразователя уровня сигнала 19, а другой выход - к модулю управления питанием электродвигателя 20, вход которого соединён с выходом модуля измерения тока потребления 22, вход которого соединён с выходом модуля управления электродвигателем 21, другой выход которого подключён ко входу электродвигателя 6 (для 1 канала) и электродвигателя 7 (для 2 канала), а другой вход модуля управления электродвигателем 21 соединён с модулем питания 15 и модулем измерения напряжения 16, модуль внешних интерфейсов 17 соединён с блоком внешних соединителей и фильтров радиопомех 3.
Устройство работает следующим образом.
В нормальном режиме работы электронный блок управления двигателем (ЭБУ) (на чертежах не показан) обеспечивает электропитанием канал 1 через электрический соединитель, а также выдаёт информацию в цифровом виде с указание требуемого угла положения поворотного элемента 12. Модуль питания 15 контроллера первого канала 4 обеспечивает необходимым напряжением цепи управления электродвигателем 6 и питание логических элементов контроллера. Контроллер 4 формирует управляющее воздействие на электродвигатель 6, который через планетарный редуктор 8 передаёт вращающий момент силы на суммирующий редуктор 10, который, в свою очередь, приводит во вращение вал дроссельной заслонки, на которой жёстко закреплён поворотный элемент 12, имеющий механическую связь с датчиком положения, передающего информацию о текущем положении в контроллер 4, обеспечивая обратную связь по положению в канале управления.
Аналогичный принцип работы предусмотрен для второго канала дроссельной заслонки.
Каждый из каналов принимает команды и передаёт информацию о своём техническом состоянии по каналам информационного обмена. Также каждый канал контролирует информацию о техническом состоянии соседнего канала, выдаваемую соседним каналом по каналу информационного обмена.
При неисправности силовой части дублирующего канала управление положением поворотного элемента 12 осуществляется основным (первым) каналом, отказавший канал не вносит помехи в управление заслонки (электродвигатель канала обесточен). При неисправности силовой части основного канала управление заслонкой осуществляется дублирующим (вторым) каналом, который становится активным, при этом отказавший канал не вносит помехи в управление.
Для обеспечения необходимой глубины самоконтроля, надёжности и отказобезопасности алгоритмически реализуются следующие режимы.
1. Режим «Инициализация».
В режиме «Инициализация» происходит настройка и подготовка дроссельной заслонки к работе в «Основном режиме работы». Из режима «Инициализация» заслонка переходит в один из следующих режимов функционирования:
- «Основной режим работы» (при успешной инициализации);
- «Загрузки программного обеспечения (ПО)» (при наличии сигнала «Загрузка»);
- «Отказ» (при неуспешной инициализации).
В режиме «Инициализация» происходит предварительная проверка исправности обоих каналов дроссельной заслонки: проверка контроллера, проверка каналов информационного обмена, проверка электродвигателей и датчиков положения.
2. «Основной режим работы»
При успешной инициализации и исправности хотя бы одного из каналов дроссельная заслонка начинает функционировать в «Основном режиме работы». Основные функции в этом режиме - приём и выполнение команд, полученных по каналу информационного взаимодействия ЭБУ, а также непрерывный контроль напряжения питания, времени наработки, состояния датчиков тока, температуры, положения вала электродвигателя и поворотного элемента для определения исправности каналов. Кроме того, для оценки состояния соседнего канала каждым каналом дроссельной заслонки осуществляется приём и анализ информации, выдаваемой соседним каналом в ЭБУ по каналу информационного обмена.
3. Режим «Калибровка»
Режим «Калибровка» запускается из «Основного режима работы» командой из группы команд режима «Калибровка» в соответствии с протоколом взаимодействия дроссельной заслонки с контрольно-проверочным оборудованием по каналу информационного взаимодействия. Приём команд из группы команд режима «Калибровка» активен в течение 2-х минут после подачи питания на дроссельную заслонку, по истечении этого времени вход в режим «Калибровка» блокируется.
Основная функция в этом режиме - калибровка датчиков положения поворотного элемента для обеспечения требуемой точности дозирования воздуха, подаваемого в двигатель внутреннего сгорания летательного аппарата. Выход из режима «Калибровка» производится сбросом напряжения питания.
4. Режим «Наземный расширенный контроль»
Режим «Наземный расширенный контроль» запускается из «Основного режима работы» при поступлении команды «Тест» по каналу информационного обмена с ЭБУ. В режиме «Наземный расширенный контроль» дроссельная заслонка по встроенным алгоритмам осуществляет предполётный контроль исправности каналов.
По истечению 2-х минут с момента подачи питания на дроссельную заслонку или после поступления из ЭБУ любой из команд на перемещение поворотного элемента («открыть», «закрыть», «переместить в заданный угол») вход в режим «Наземный расширенный контроль» блокируется.
5. Режим «Отказ»
При неуспешной инициализации или неисправности обоих каналов дроссельная заслонка начинает функционировать в режиме «Отказ». В режиме «Отказ» дроссельная заслонка обесточивает электродвигатели обоих каналов, и пружина кручения переводит поворотный элемент в полностью открытое положение.
6.Режим «Резервный»
Во время работы в «Основном режиме» при возникновении отказа одного из каналов, дроссельная заслонка автоматически переходит в режим «Резервный» средствами встроенного программного обеспечения, продолжая оставаться полностью функциональной.
7. Режим «Реконфигурация системы»
При наличии режима «Отказ» при крайней необходимости продолжения управляемого дозирования количества воздуха в двигатель летательного аппарата ЭБУ выдаёт в дроссельную заслонку по каналу информационного взаимодействия команду «Реконфигурация системы». Дроссельная заслонка, выполнив анализ состояния функциональных элементов каждого из каналов управления, выстраивает программными средствами функциональную схему и работоспособных элементов каждого из каналов, которая может обеспечить дальнейшее функционирование дроссельной заслонки.
При работе первого канала второй канал находится в «горячем резерве» и отслеживает реакцию канала управления поворотным элементом на управляющее воздействие и при рассогласовании результата управления, сравнивая фактическое значение положения поворотного элемента с рассчитанным по математической модели выявляет отказное состояние, о чем передаёт информацию в электронный блок управления, который принимает решение: полностью снять электропитание с дроссельной заслонки, тем самым открыв проходное сечения воздуховода двигателя или передать управление второму каналу, отключив первый.
При частичном разнородном отказе элементов обоих каналов управления алгоритмы, реализованные в программном обеспечении, позволяют по сигналу электронного блока управления выполнить реконфигурацию элементов каналов управления, обеспечив перекрёстное управление контроллером первого канала электродвигателем второго канала и наоборот, а также использование информации от датчика углового положения первого канала контроллеров второго канала и наоборот.
Как видно из фиг.3, соединители каналов 1 и 2, контроллеры 4 и 5, и датчики положения 13 и 14 работают в режиме горячего резервирования (параллельное нагруженное соединение). В свою очередь, электродвигатель 6 имеет резерв в виде аналогичного электродвигателя 7, который включается в работу только после обнаружения отказа на основной линии (параллельное ненагруженное соединение).
Однако, следует заметить, что физически, с помощью силовых и информационных выводов, внутри заслонки образуется две линии: основная и резервная. Обе линии состоят из одинаковых компонентов: контроллера, электродвигателя, датчика положения и соединителя. В случае обнаружения отказа одного из перечисленных компонентов в основной линии, в работу включается резервная линия, основная же отключается (переход дроссельной заслонки в «Резервный режим» или «Реконфигурация системы»).
Блок внешних соединителей 3 обеспечивает необходимые электрические связи с контактами внешних соединителей. Производит фильтрацию цепей для обеспечения требований радиоэлектронной защиты. Обеспечивает работоспособность заслонки при пропадании напряжения по одному из каналов. Обеспечивает ограничение пусковых токов. В модуле используется фильтр МРМ1-Д2,5ДМ для фильтрации помех по цепям питания и обеспечения электромагнитной совместимости (ЭМС) и защитные элементы фирмы Bourns (быстродействующие разрядники, токовые предохранителя и супрессоры) для защиты интерфейсных цепей от перенапряжений. Ограничение пусковых токов и отключение питания при отсутствии внешнего дискретного сигнала «Включение» производится схемой на основе МОП транзисторов 2ПЕ209В92. Напряжение питания с 2-х каналов суммируется с помощью сборки диодов шоттки 2ДШ2125БС92.
Контроллеры 4 и 5 предназначены для приёма информации о положении поворотного элемента 12 от датчиков положения 13 и 14, приёма информации о положении вала электродвигателей 6 и 7, выдачу необходимых управляющих сигналов на электродвигатели, обеспечения самоконтроля собственной исправности.
Модуль питания 15 контроллеров 4 и 5 (фиг. 2) предназначен для преобразования первичного напряжения питания в необходимые напряжения (+15 В, +5 В, -5 В, +3,3 В) для питания электронных компонентов блока контроллера. В модуле питания используются DC/DC преобразователи МДМ 2(5)-1А05СН, МДМ 10-1Ш15СН, стабилизатор напряжения 1158ЕН3.3ВХ.
Модуль измерения напряжений питания 16 контроллеров 4 и 5 обеспечивает приведение уровней напряжений к необходимым для подачи на входы контроллеров.
Модуль внешних интерфейсов 17 обеспечивает обмен на физическом уровне по каналам обмена. В модуле используются микросхемы 1586ИН2АУ1, 1586ИН4АУ1, 5559ИН1Т.
Вычислительный модуль 18 контроллеров 4 и 5 обеспечивает хранение программного обеспечения в энергонезависимой памяти, выполнение программы при подаче питания, прием и обработку аналоговых и дискретных сигналов, обмен информацией с датчиком углового положения и внешней энергонезависимой памятью, выдачу необходимых дискретных сигналов в соответствии с алгоритмами. В вычислительном модуле используется микроконтроллер 1986ВЕ1Т и микросхема ЭППЗУ Flash-типа с последовательным интерфейсом 1636РР52У.
Модуль преобразователя уровней сигналов 19 контроллеров 4 и 5 обеспечивает преобразование управляющих сигналов, поступающих из вычислительного модуля 18 в уровни, необходимые для работы модуля управления электродвигателем 21. Используется микросхема 5514БЦ2У2-9А9, представляющая собой аналоговый компаратор.
Модуль управления электродвигателем 21 контроллеров 4 и 5 обеспечивает преобразование управляющих сигналов, поступающих из модуля преобразователя уровней сигналов 19 в сигналы управления силовыми ключами (МОП-транзисторы), коммутирующими обмотки электродвигателя, в соответствии с алгоритмом управления. В модуле используются микросхемы 1308ЕУ3АУ, МОП-транзисторы 2ПЕ208В92.
Модуль измерения тока потребления 22 контроллеров 4 и 5 силовой части электродвигателя обеспечивает измерение напряжения на токовом шунте, пропорционального току потребления электродвигателя. Используется микросхема 544УД16У3 (универсальный сдвоенный операционный усилитель класса Rail-to-Rail).
Модуль управления питанием электродвигателя 20 контроллеров 4 и 5 обеспечивает отключение питания электродвигателя сигналом из вычислительного модуля 18 или сигналом, формируемым при превышении максимально допустимого тока потребления (перегрузка) или при зависании (выходе из строя) вычислительного модуля 18. Используется логическая схема 3-ИЛИ на микросхеме 5514БЦ1У1-32 (4 элемента 2-ИЛИ) и микросхема 1564АГ3 включённая по схеме ждущего одновибратора.
Таким образом, заявляемое устройство обеспечивает непрерывный мониторинг технического состояния заслонки, обеспечивает высокие показатели надёжности и обладает способностью к безотказной работе.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИМИТАЦИИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ ОТРАБОТКИ ПРОГРАММНОГО И АППАРАТНОГО ОБЕСПЕЧЕНИЯ ПОЛЁТНОГО КОНТРОЛЛЕРА | 2023 |
|
RU2799166C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СИСТЕМЫ УПРАВЛЕНИЯ | 2015 |
|
RU2601368C1 |
| Универсальный модульный IoT-контроллер для системы глобального мониторинга и управления энергопотреблением | 2019 |
|
RU2712111C1 |
| Исполнительный механизм системы управления | 2015 |
|
RU2607490C2 |
| ПАНОРАМНЫЙ АВИАЦИОННЫЙ ИНДИКАТОР | 2022 |
|
RU2800102C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ЭЛЕМЕНТОВ БЕСПИЛОТНОГО ВЕРТОЛЕТА С СООСНЫМИ ВИНТАМИ | 2016 |
|
RU2628873C2 |
| Подъемно-мачтовое устройство | 2016 |
|
RU2622516C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВОЗДУШНЫМ СТАРТЕРОМ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2020 |
|
RU2748579C1 |
| Стенд для испытаний элементов вертолета с соосными винтами | 2017 |
|
RU2664982C1 |
| ПРЕДОХРАНИТЕЛЬНОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ИСПОЛНИТЕЛЬНОГО ЭЛЕМЕНТА | 2010 |
|
RU2551472C2 |
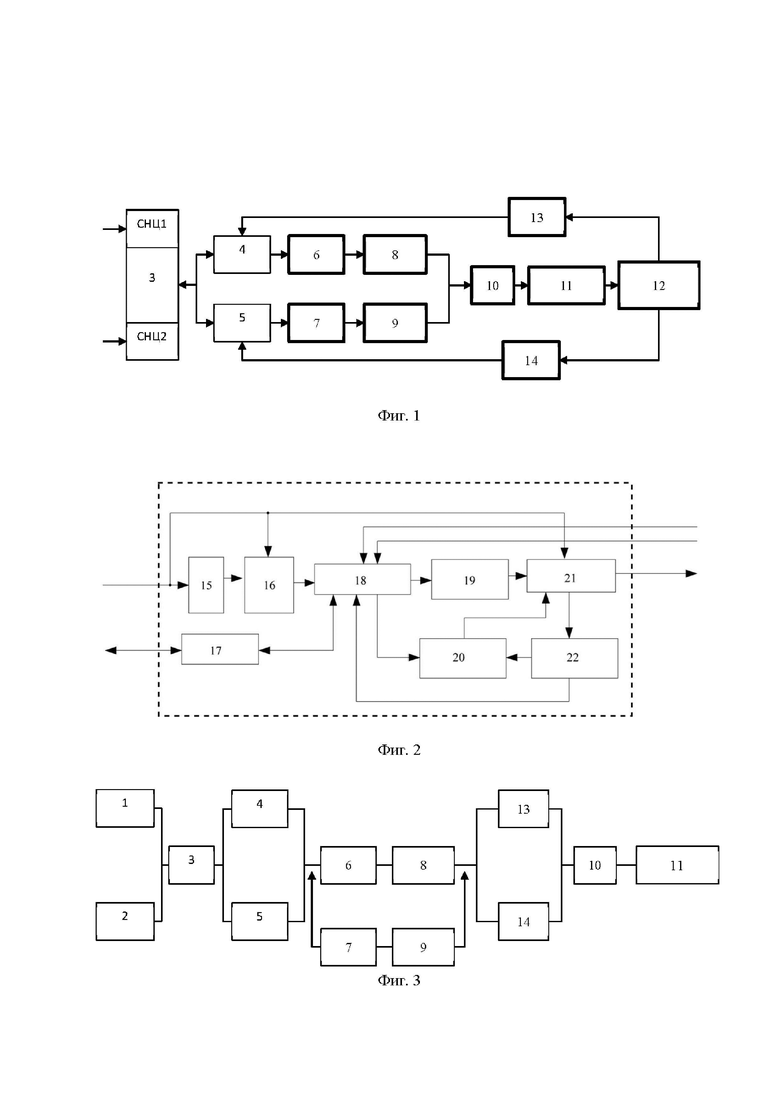
Изобретение может быть использовано в авиационных поршневых двигателях. Устройство управления дроссельной заслонкой двигателя летательного аппарата содержит электродвигатель (6), подключённый к контроллеру (4), соединённому с датчиком (13) положения заслонки. Датчик (13) положения заслонки соединён с поворотным элементом (13), подключённым к возвратной пружине (11). Устройство содержит второй электродвигатель (7), подключённый ко второму контроллеру (5), соединённому со вторым датчиком (14) положения заслонки. Второй датчик (14) положения заслонки подключён к поворотному элементу (12). Устройство содержит два планетарных редуктора (8), (9), суммирующий редуктор (10), два электрических соединителя (СНЦ1), (СНЦ2) и блок (3) внешних соединителей и фильтров радиопомех. Электрический соединитель (СНЦ1), электродвигатель (6), контроллер (4), планетарный редуктор (8) и датчик (13) положения заслонки образуют основной канал управления. Второй электрический соединитель (СНЦ2), второй электродвигатель (7), контроллер (5), планетарный редуктор (9) и датчик (14) положения образуют дублирующий канал управления. Планетарные редукторы (8), (9) подключены к суммирующему редуктору (10), соединённому с возвратной пружиной (11). Контроллеры (4), (5) подключены к блоку (3) внешних соединителей, связанному с электрическими соединителями (СНЦ1), (СНЦ2). Технический результат заключается в повышении надёжности устройства управления дроссельной заслонкой. 1 з.п. ф-лы, 3 ил.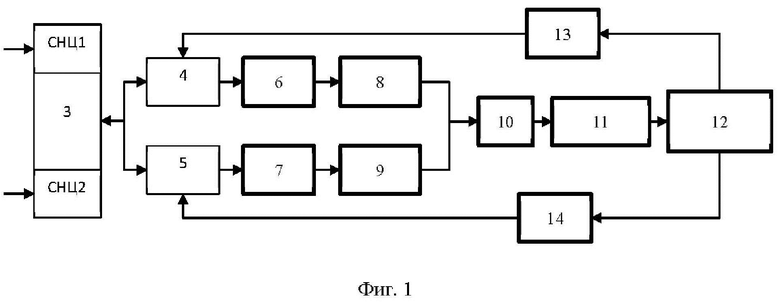
1. Устройство управления дроссельной заслонкой двигателя летательного аппарата, содержащее электродвигатель, подключённый к контроллеру, соединённому с датчиком положения заслонки, соединённым с поворотным элементом, подключённым к возвратной пружине, отличающееся тем, что оно содержит второй электродвигатель, подключённый ко второму контроллеру, соединённому со вторым датчиком положения заслонки, подключённым к поворотному элементу, два планетарных редуктора, суммирующий редуктор, два электрических соединителя и блок внешних соединителей и фильтров радиопомех , при этом один из электрических соединителей, электродвигатель, контроллер, планетарный редуктор и датчик положения заслонки образуют основной канал управления, а второй электрический соединитель, второй электродвигатель, контроллер, планетарный редуктор и датчик положения образуют дублирующий канал управления, причём планетарные редукторы подключены к суммирующему редуктору, соединённому с возвратной пружиной, а контроллеры подключены к блоку внешних соединителей, связанному с электрическими соединителями.
2. Устройство по п.1, отличающееся тем, что каждый из контроллеров состоит из модуля питания, модуля измерения напряжения, модуля внешнего интерфейса, вычислительного модуля, модуля преобразователя уровня сигнала, модуля управления питанием электродвигателя, модуля управления электродвигателем, модуля измерения тока потребления, при этом входы вычислительного модуля подключены к выходу блока электропривода, блока датчика положения, модулю измерения тока потребления и модулю внешних интерфейсов, один из выходов вычислительного модуля подключён к модулю преобразователя уровня сигнала, а другой выход – к модулю управления питанием электродвигателя, вход которого соединён с выходом модуля измерения тока потребления, вход которого соединён с выходом модуля управления электродвигателем, другой выход которого подключён ко входу блока электродвигателя, а другой вход модуля управления электродвигателем соединён с модулем питания и модулем измерения напряжения, модуль внешних интерфейсов соединён с блоком внешних соединителей и фильтров радиопомех.
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ДЛЯ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ЗАСЛОНКИ | 1996 |
|
RU2101598C1 |
| Селекторный ключ | 1935 |
|
SU48591A1 |
| ИНТЕРФЕЙСНАЯ СИСТЕМА УПРАВЛЕНИЯ МОЩНОСТЬЮ И СКОРОСТЬЮ ДВИГАТЕЛЯ | 2012 |
|
RU2602704C2 |
| JP 2006097627 A, 13.04.2006 | |||
| DE 102006002837 A1, 01.02.2007 | |||
| US 7231265 B2, 12.06.2007. | |||

