Изобретение относится к подъемно-мачтовым устройствам (далее по тексту - ПМУ), преимущественно к автоматическим системам развертывания подъемно-мачтовых устройств мобильных антенных установок.
Известна телескопическая мачта, снабженная подъемным механизмом с редуктором (а.с. СССР №661297/26, 31.03.1960 г.). Согласно описанию механизм подъема и развертывания первой мачты представляет собой механический привод, приводимый в действие вручную, что увеличивает время приведения мачты в готовность.
Известен гидравлический привод преимущественно мобильной антенной установки с подъемной мачтой (патент РФ №2281244, 09.03.2005 г.). Однако согласно описанию приводные механизмы являются гидравлическими, а следовательно, достаточно сложны и трудоемки в изготовлении. Необходимость выполнения ручных операций при развертывании системы ведет к увеличению времени развертывания системы и риску выполнения неправильных действий оператора, которые могут привести к аварийной ситуации.
Известен наземный транспортный комплекс для обнаружения и распознавания объектов (пат. №2352480, 24.07.2007 г.). В наземном транспортном средстве размещены системы электропитания и оптикоэлектронная система, установленная на опорно-поворотном устройстве, закрепленном на подъемно-мачтовом приспособлении, причем приспособление в походном положении размещается внутри транспортного средства. Конструкция ПМУ имеет две крышки, рассчитанные на герметичное закрывание в походном и рабочем положении. ПМУ приводится в рабочее положение с помощью электропривода и ременных передач специального профиля. Недостатком данного решения является небольшая высота подъема (менее высоты корпуса объекта установки), неполная автоматизация процесса развертывания, связанная с ручным закрытием крышек.
Известна самоходная установка с подъемно-мачтовым устройством (пат. №2442098, 15.07.2010). Согласно описанию, на самоходном шасси установлены не менее трех шарнирно соединенных подъемных ступеней, имеющих жесткие упоры, приводимые в действие гидроцилиндром. Недостатком ее является сложность изготовления гидравлической системы, большой объем, занимаемый конструкцией внутри шасси из-за параллельной горизонтальной укладки ступеней в сложенном состоянии.
Известна телескопическая мачта (пат. №2198131, 13.12.2000 г.), снабженная приводным электродвигателем с планетарным редуктором и конечными выключателями верхнего и нижнего положения мачты, по сигналам которых происходит отключение приводного электродвигателя. Данное устройство является ближайшим аналогом подъемно-мачтового устройства и принимается за прототип.
Согласно описанию механизм подъема и развертывания мачты представляет собой электромеханический привод, обеспечивающий полуавтоматический режим подъема при участии оператора с контролем предельных положений телескопической мачты путем установки конечных выключателей.
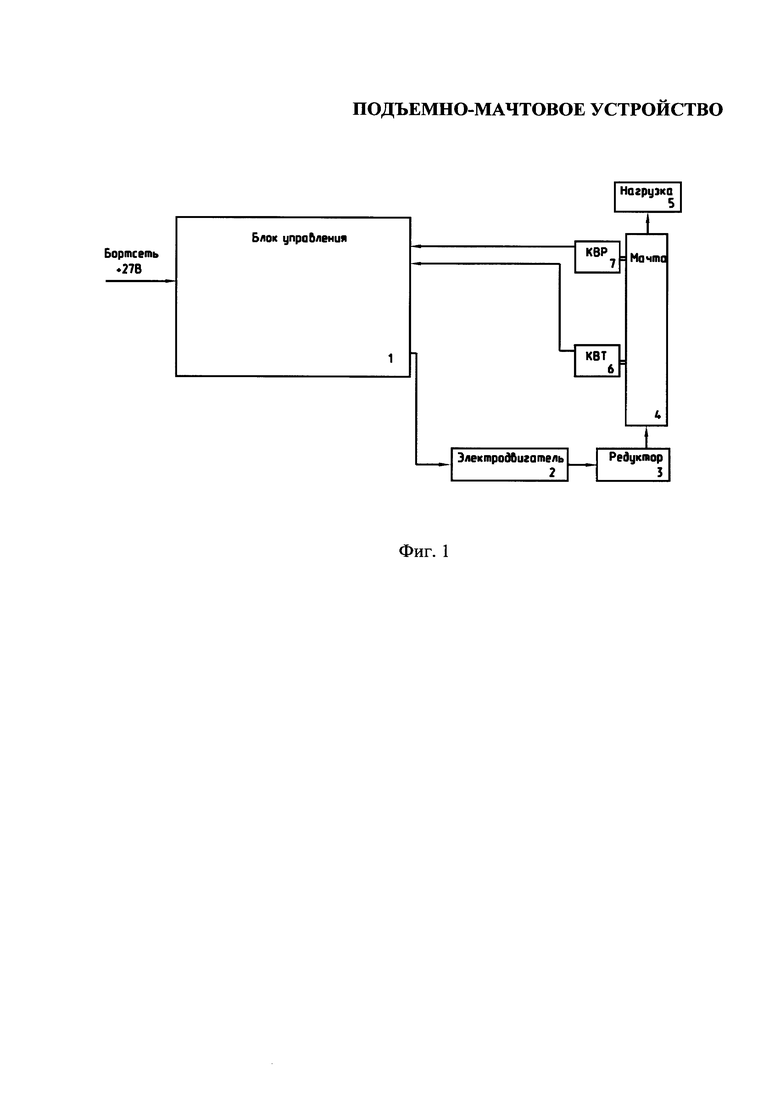
Структурная схема подъемно-мачтового устройства-прототипа представлена на Фиг. 1.
Развертывание мачты осуществляется следующим образом.
Оператор на блоке управления 1 выбирает режим развертывания мачты телескопической, при этом включается приводной электродвигатель 2, который через планетарный редуктор 3 приводит в движение мачту телескопическую 4 с установленной на ней нагрузкой 5. При начале движения мачты телескопической происходит выключение концевого выключателя транспортного положения (КВТ) 6. Сигнал с (КВТ) 6 подается в блок управления 1 и выключает соответствующую индикацию транспортного положения мачты телескопической 4. При достижении концевого выключателя развернутого положения (КВР) 7 электрический сигнал поступает в блок управления 1 и по данному сигналу происходит выключение приводного электродвигателя 2, который через планетарный редуктор 3 останавливает мачту телескопическую 4 с установленной на ней нагрузкой 5 в развернутом положении, при этом в блоке управления 1 включается соответствующая индикация развернутого положения мачты.
Свертывание мачты производится в обратном порядке. Оператор на блоке управления 1 выбирает режим свертывания мачты телескопической, при этом включается приводной электродвигатель 2, который через планетарный редуктор 3 приводит в движение мачту телескопическую 4 с установленной на ней нагрузкой 5. При начале движения мачты телескопической происходит выключение концевого выключателя развернутого положения (КВР) 7. Сигнал с (КВР) 7 подается в блок управления 1 и выключает соответствующую индикацию развернутого положения мачты телескопической 4. При достижении концевого выключателя транспортного положения (КВТ) 6 электрический сигнал поступает в блок управления 1 и по данному сигналу происходит выключение приводного электродвигателя 2, который через планетарный редуктор 3 останавливает мачту телескопическую 4 с установленной на ней нагрузкой 5 в транспортном положении, при этом в блоке управления 1 включается соответствующая индикация транспортного положения мачты.
Блок управления 1 соединен с бортсетью +27 В объекта.
Недостатками вышеуказанного подъемно-мачтового устройства-прототипа являются:
- низкая надежность мачты, связанная с возможностью повреждения конструкции мачты и электропривода при развертывании мачты с большим отклонением от вертикали или при отказе концевых датчиков;
- отсутствие возможности дистанционного управления процессом развертывания и свертывания мачты из системы управления объекта применения.
Техническими задачами заявляемого изобретения являются:
- повышение удобства управления (обеспечение возможности дистанционного управления);
- автоматизация выполнения операций по развертыванию и свертыванию мачты;
- повышение надежности работы мачты.
Для решения поставленных задач в известное подъемно-мачтовое устройство, содержащее: блок управления, приводной электродвигатель, силовой редуктор, мачту телескопическую, нагрузку, концевой выключатель транспортного положения (КВТ), концевой выключатель развернутого положения (КВР), согласно изобретению дополнительно введены:
- станция управления, включающая в себя:
• усилитель мощности;
• блок управления, в который дополнительно введены:
- панель управления;
- модуль контроллера;
- модуль обработки (МО);
- блок силовых ключей (БСК);
- контроллер последовательной шины первый (КПШ1);
- контроллер последовательной шины второй (КПШ2),
- датчик наклона (ДН), механически связанный с корпусом мачты телескопической;
- фиксатор транспортного положения первый (ФТП1);
- фиксатор транспортного положения второй (ФТП2);
- датчик высоты подъема (ДВП),
при этом в силовой редуктор подъемно-мачтового устройства дополнительно введена приборная ветвь, механически связывающая вал датчика высоты подъема (ДВП) с приводным винтом мачты телескопической,
причем панель управления, входящая в состав блока управления, электрически связана с модулем контроллера, который, в свою очередь, электрически связан с блоком силовых ключей (БСК), модулем обработки (МО), контроллером последовательной шины первым (КПШ1), контроллером последовательной шины вторым (КПШ2),
при этом блок силовых ключей (БСК) электрически связан с фиксатором транспортного положения первым (ФТП1) и фиксатором транспортного положения вторым (ФТП2), которые, с одной стороны, механически связаны с корпусом мачты телескопической, с другой стороны, с нагрузкой, обеспечивая ее механическую фиксацию в транспортном положении мачты телескопической,
причем контроллер последовательной шины второй (КПШ2), например по каналу типа CAN, и модуль обработки (МО) блока управления электрически связаны соответственно с датчиком наклона (ДН) мачты телескопической и датчиком высоты подъема (ДВП) мачты телескопической,
при этом, с одной стороны, контроллер последовательной шины первый (КПШ1) блока управления, например, по каналу типа CAN электрически связан с внешними устройствами, а блок управления и усилитель мощности станции управления связаны с бортсетью +27 В объекта,
с другой стороны, блок управления через собственный модуль контроллера электрически связан с усилителем мощности, вращающим вал приводного электродвигателя, который через силовой редуктор обеспечивает подъем и опускание мачты телескопической в заданное внешними устройствами, панелью управления и датчиком высоты подъема положение, при этом концевой выключатель транспортного положения (КВТ) и концевой выключатель развернутого положения (КВР), с одной стороны, механически связаны с корпусом мачты телескопической и, с другой стороны, электрически связаны с модулем контроллера блока управления,
в свою очередь, усилитель мощности электрически связан с модулем контроллера блока управления по сигналам обратных связей по току (ОСТ) и скорости (ОСС) приводного электродвигателя.
Сопоставительный анализ с прототипом показывает, что в заявляемое подъемно-мачтовое устройство введены новые компоненты, а именно:
- станция управления, включающая в себя:
• усилитель мощности;
• блок управления, в который дополнительно введены:
- панель управления;
- модуль контроллера;
- модуль обработки (МО);
- блок силовых ключей (БСК);
- контроллер последовательной шины первый (КПШ1);
- контроллер последовательной шины второй (КПШ2),
- датчик наклона (ДН), механически связанный с корпусом мачты телескопической;
- фиксатор транспортного положения первый (ФТП1);
- фиксатор транспортного положения второй (ФТП2);
- датчик высоты подъема (ДВП),
в силовой редуктор подъемно-мачтового устройства дополнительно введена приборная ветвь, механически связывающая вал датчика высоты подъема (ДВП) с приводным винтом мачты телескопической.
Сравнение заявляемого решения с другими техническими решениями показывает, что вновь вводимые элементы достаточно хорошо известны в технике, но их введение в указанной связи в заявляемое подъемно-мачтовое устройство (ПМУ) позволяет:
- управлять процессом развертывания ПМУ через внешние устройства из системы управления объекта установки за счет наличия последовательного канала связи типа CAN;
- автоматизировать процессы свертывания и развертывания ПМУ за счет наличия модуля контроллера, с заданным алгоритмом работы;
- повысить надежность ПМУ за счет:
- самодиагностики неисправностей при включении ПМУ,
- дублированного контроля высоты подъема мачты телескопической за счет использования концевых выключателей транспортного и рабочего положения и датчика высоты подъема,
- наличия обратных связей по току и скорости приводного электродвигателя и информации от датчика высоты подъема, позволяющих алгоритмически ограничивать ток приводного электродвигателя при появлении неисправностей в механизмах,
- наличия датчика наклона и алгоритмов блокировки процесса развертывания мачты телескопической при превышении отклонения корпуса мачты от вертикального положения свыше заданного значения.
Устройство и работа заявляемого изобретения поясняются чертежами.
На Фиг. 1 приведена структурная схема подъемно-мачтового устройства-прототипа.
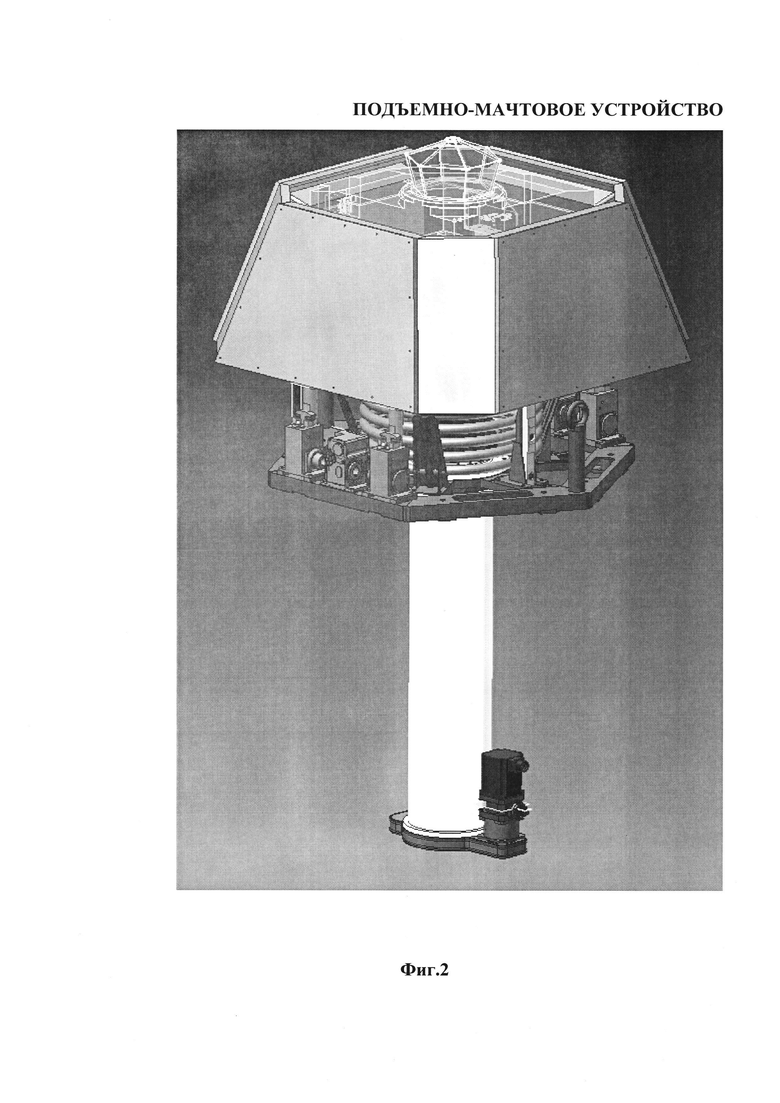
На Фиг. 2 представлен внешний вид заявляемого подъемно-мачтового устройства.
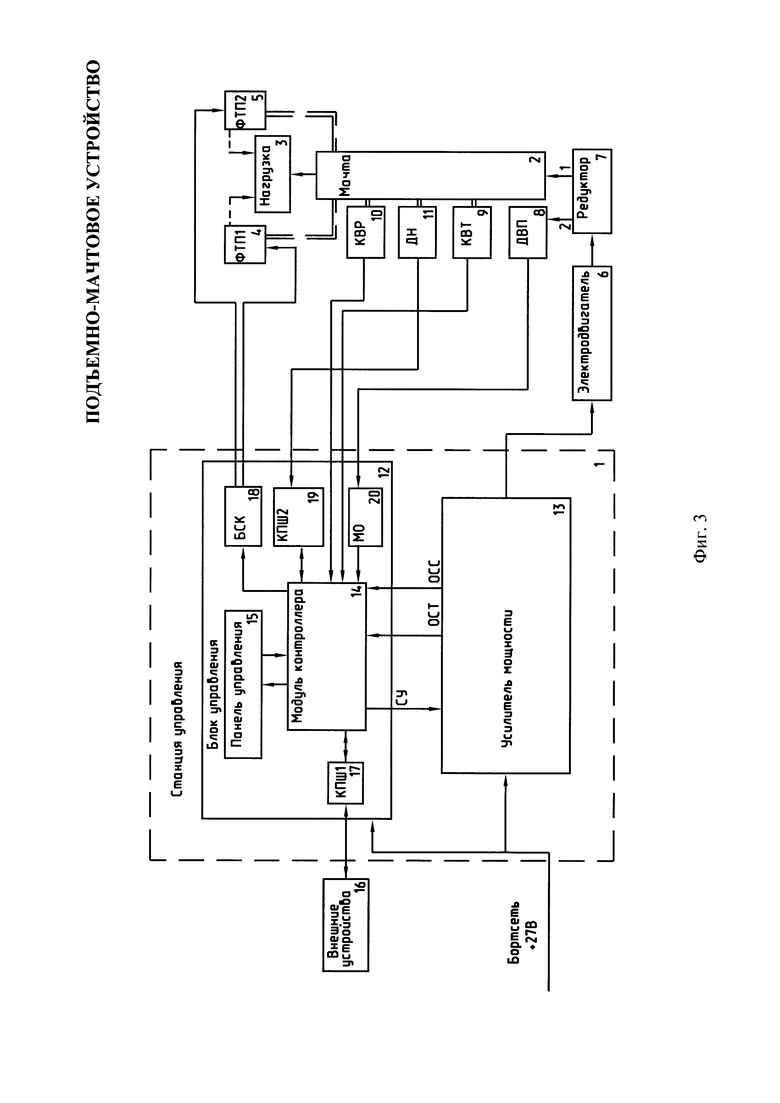
На Фиг. 3 приведена структурная схема заявляемого подъемно-мачтового устройства.
Сокращения, принятые в тексте и на Фиг.1 и Фиг. 3:
БСК - блок силовых ключей;
ДВП - датчик высоты подъема;
ДН - датчик наклона;
КВР - концевой выключатель развернутого положения мачты телескопической;
КВТ - концевой выключатель транспортного положения мачты телескопической;
КПШ1 - контроллер последовательной шины первый;
КПШ2 - контроллер последовательной шины второй;
МО - модуль обработки;
ОСС - обратная связь по скорости приводного электродвигателя;
ОСТ - обратная связь по току приводного электродвигателя;
ПМУ - подъемно-мачтовое устройство;
СУ - сигнал управления;
ФТП1 - фиксатор транспортного положения первый;
ФТП2 - фиксатор транспортного положения второй;
ШИМ - широтно-импульсная модуляция.
Подъемно-мачтовое устройство состоит из следующих элементов: станции управления 1, телескопической многоступенчатой мачты 2 с установленной на ней полезной нагрузкой 3. Нагрузка в транспортном положении жестко фиксируется к корпусу объекта установки при помощи фиксаторов транспортного положения (ФТП1) 4 и (ФТП2) 5. Фиксаторы транспортного положения (ФТП1) 4 и (ФТП2) 5 оснащены концевыми выключателями, формирующими сигнал в станцию управления. Развертывание мачты осуществляется с помощью приводного электродвигателя 6 и редуктора 7. В редукторе имеется вторая приборная ветвь, один оборот выходного вала которой соответствует полной высоте подъема мачты телескопической, с которой связан датчик высоты подъема (ДВП) 8, представляющий из себя датчик, измеряющий угол поворота, с помощью которого контролируется высота подъема мачты телескопической. Для повышения надежности контроля развертывания имеются концевые выключатели транспортного положения (КВТ) 9 и развернутого положения (КВР) 10, выдающие сигнал в станцию управления о двух крайних положениях мачты телескопической. Также на корпусе мачты установлен датчик наклона (ДН) 11, выдающий сигнал об углах наклона крена и тангажа по последовательному интерфейсу типа CAN в станцию управления.
Станция управления состоит из блока управления 12 и усилителя мощности 13. Модуль контроллера 14 принимает команды с панели управления 15 либо от внешних устройств 16 из системы управления объекта установки через контроллер последовательной шины первый (КПШ1) 17 по последовательному интерфейсу типа CAN. Модуль контроллера 14 осуществляет по сигналу управления (СУ) управление усилителем мощности 13, принимает от него сигналы обратной связи по току (ОСТ) и скорости (ОСС) вращения приводного электродвигателя 6, выдает сигналы через блок силовых ключей (БСК) 18 на фиксаторы транспортного положения (ФТП1) 4 и (ФТП2) 5, принимает сигнал от датчика наклона (ДН) 11 по последовательному интерфейсу типа CAN через контроллер последовательной шины второй (КПШ2) 19, принимает сигнал с датчика высоты подъема (ДВП) 8 через модуль обработки (МО) 20.
Подъемно-мачтовое устройство работает следующим образом.
При подаче питания происходит запуск управляющего программного обеспечения в модуле контроллера 14 и проверка всех подключенных к нему устройств по заданному алгоритму. В случае успешной проверки система переходит в состояние готовности к работе. Запускается процесс обмена информацией с внешними устройствами 16 объекта применения.
При поступлении управляющей команды с панели управления 15 или от внешних устройств 16 через контроллер последовательной шины первый (КПШ1) 17 в модуле контроллера 14 происходит анализ сигнала датчика наклона (ДН) 11, поступившего через контроллер последовательной шины второй (КПШ2) 19, если отклонение мачты от вертикали находится в пределах допустимого, то вырабатывается соответствующая команда и через блок силовых ключей (БСК) 18 происходит формирование сигнала на перевод фиксаторов транспортного положения мачты (ФТП1) 4 и (ФТП2) 5 в рабочее положение.
После перевода фиксаторов (ФТП1) 4 и (ФТП2) 5 в рабочее положение в модуле контроллера 14 формируется сигнал управления (СУ) усилителя мощности 13 с учетом сигналов обратных связей по току (ОСТ) и скорости (ОСС) вращения приводного электродвигателя 6 и данных с датчика высоты подъема (ДВП) 8.
Сигнал управления (СУ) для усилителя мощности 13 формируется таким образом, что одновременно выполняется управление скоростью развертывания и высотой подъема мачты телескопической 2. Подъем мачты телескопической 2 заканчивается на заданной высоте по сигналу, поступающему с датчика высоты подъема (ДВП) 8 через модуль обработки (МО) 20, либо с концевого выключателя развернутого положения мачты телескопической (КВР) 10 непосредственно в модуль контроллера 14. По окончании процесса перевода мачты телескопической 2 в рабочее положение в модуле контроллера 14 формируется соответствующее сообщение во внешние устройства 16 через контроллер последовательной шины первый (КПШ1) 17 и на панель управления 15 блока управления 12.
Перевод подъемно-мачтового устройства в транспортное положение осуществляется в обратной последовательности.
При поступлении управляющей команды на перевод мачты телескопической 2 в транспортное положение с панели управления 15 или от внешних устройств 16 через контроллер последовательной шины первый (КПШ1) 17 в модуле контроллера 14 формируется сигнал управления (СУ) усилителя мощности 13 с учетом сигналов обратных связей по току (ОСТ) и скорости (ОСС) вращения приводного электродвигателя 6 и данных с датчика высоты подъема (ДВП) 8.
Сигнал управления (СУ) для усилителя мощности 13 формируется таким образом, что выполняется управление скоростью движения с учетом высоты положения мачты телескопической 2. Перевод мачты телескопической 2 в транспортное положение заканчивается на заданной высоте по сигналу, поступающему с датчика высоты подъема (ДВП) 8 через модуль обработки (МО) 20 либо с концевого выключателя транспортного положения мачты телескопической (КВТ) 9 непосредственно в модуль контроллера 14.
После перевода мачты телескопической 2 в транспортное положение происходит выработка команды в модуле контроллера 14 и формирование сигнала в блоке силовых ключей (БСК) 18 на перевод фиксаторов транспортного положения мачты (ФТП1) 4 и (ФТП2) 5 в транспортное положение. По окончании процесса перевода фиксаторов в транспортное положение в модуль контроллера 14 передается соответствующий сигнал, который формирует сообщение об окончании процесса перевода мачты телескопической 2 в транспортное положение во внешние устройства 16 через контроллер последовательной шины первый (КПШ1) 17 и на панель управления 15 блока управления 12.
Чтобы исключить пиковые и ударные нагрузки на механические элементы привода и повысить плавность выполнения операций, управляющий сигнал для привода подъема мачты формируется с ограничением по скорости и ускорению в зависимости от массы установленной нагрузки, что существенно повышает надежность работы системы в целом.
В процессе подъема мачты телескопической 2 в усилителе мощности 13 формируются сигналы, пропорциональные току (ОСТ) и скорости (ОСС) приводного электродвигателя 6, по которым в модуле контроллера 14 блока управления 12 происходит непрерывный анализ наличия аварийных ситуаций в механизмах по изменениям величины тока и скорости вращения приводного электродвигателя 6.
В процессе подъема мачты телескопической 2 ведется непрерывный анализ отклонения подъемно-мачтового устройства от вертикального положения по данным, поступающим с датчика наклона 11 по двум взаимно перпендикулярным осям наклона крена и тангажа. При превышении предельной величины наклона система останавливает выполнение операции подъема мачты телескопической 2 и выдает сообщение не панель управления 15 и во внешние устройства 16 через контроллер последовательной шины первый (КПШ1) 17 оператору.
По командам с панели управления 15 или из внешних устройств 16 через контроллер последовательной шины первый (КПШ1) 17 работу системы можно остановить в любом положении. Также возможен перевод в любое положение системы на любую высоту по соответствующим командам управления.
Отдельные новые элементы заявляемого ПМУ реализованы как часть программного обеспечения модуля контроллера блока управления, при этом обработка получаемых и передаваемых данных осуществляется модулями, такими как модули аналого-цифрового преобразования (ОСТ) и (ОСС) и цифроаналогового преобразования (СУ), модуль вычисления угла поворота (МО) датчика положения (ДВП) и модулей формирователей сигналов последовательной шины типа CAN (КПШ1) и (КПШ2).
Выходной каскад усилителя мощности может быть выполнен по мостовой схеме, построенной на транзисторных сборках управляемых в режиме широтно-импульсной модуляции (ШИМ).
(См. книгу под редакцией Богнера Р. и Константинидиса А. «Введение в цифровую фильтрацию». Пер.с англ. - М.: Мир, 1976).
(См. книгу Хоровиц П., Хилл У. «Искусство схемотехники». Пер. с англ. - 4-е изд. перераб. и доп. - М.: Мир, 1993).
(См. книгу Войтицкий С.А., Войтицкая Г.Н. Аналого-цифровой преобразователь сигналов синусно-косинусного вращающегося трансформатора в опорно-поворотном устройстве малогабаритной РЛС наземного базирования // Вестник Тульского государственного университета. Сер. Системы управления. 2010. Вып. 1).
(См. Оппенгейм А., Шафер Р. Цифровая обработка сигналов. М.: Техносфера, 2006. 856 с.).
Таким образом, заявляемое в качестве изобретения подъемно-мачтовое устройство позволяет:
- управлять процессом развертывания через внешние устройства из системы управления объекта установки за счет наличия последовательного канала связи типа CAN;
- автоматизировать процессы свертывания и развертывания ПМУ за счет наличия модуля контроллера с заданным алгоритмом работы;
- повысить надежность ПМУ за счет:
- самодиагностики неисправностей при включении ПМУ,
- дублированного контроля высоты подъема мачты телескопической за счет использования концевых выключателей транспортного и рабочего положения и датчика высоты подъема,
- наличия обратных связей по току и скорости приводного электродвигателя и информации от датчика высоты подъема, позволяющих алгоритмически ограничивать ток приводного электродвигателя при появлении неисправностей в механизмах,
- наличия датчика наклона и алгоритмов блокировки процесса развертывания мачты телескопической при превышении отклонения корпуса мачты от вертикального положения свыше заданного значения.
Приведенные в описании технические преимущества, целесообразность и надежность ПМУ, реализованного по заявляемой структурной схеме, подтверждены испытаниями опытного образца ПМУ на испытательной базе ОАО «СКБ ПА», ОАО «КЭМЗ» г. Коврова и в составе объекта в АО НПП «Рубин» г. Пензы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНО-МАЧТОВОЕ УСТРОЙСТВО | 2011 |
|
RU2461923C1 |
| Автоматическое антенно-мачтовое устройство с несимметричной и симметричными антеннами | 2023 |
|
RU2813238C1 |
| Автоматическое антенно-мачтовое устройство с механизмами подъема | 2023 |
|
RU2813629C1 |
| ПОДЪЕМНО-МАЧТОВОЕ УСТРОЙСТВО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ | 2010 |
|
RU2419925C1 |
| ПОДЪЕМНО-МАЧТОВОЕ УСТРОЙСТВО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ | 2008 |
|
RU2373618C1 |
| МАЧТОВОЕ УСТРОЙСТВО | 2012 |
|
RU2496193C1 |
| ПОДЪЕМНО-МАЧТОВОЕ УСТРОЙСТВО | 2015 |
|
RU2609671C2 |
| Телескопическая мачта с пакетным выдвижением секций с механизмом подъема на основе цепи | 2021 |
|
RU2760061C1 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| НАЗЕМНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ | 2013 |
|
RU2530185C1 |
Изобретение относится подъемно-мачтовым устройствам (ПМУ), преимущественно к автоматическим системам развертывания подъемно-мачтовых устройств мобильных антенных установок. Целью заявляемого изобретения является повышение удобства управления за счет обеспечения возможности дистанционного управления и автоматизации выполнения операций по развертыванию и свертыванию мачты, а также повышение надежности работы мачты. Указанная цель достигается тем, что в ПМУ дополнительно введены с соответствующими связями с другими элементами: станция управления, включающая в себя: усилитель мощности; блок управления, в который дополнительно введены: панель управления; модуль контроллера; модуль обработки (МО); блок силовых ключей (БСК); контроллер последовательной шины первый (КПШ); контроллер последовательной шины второй (КПШ), датчик наклона (ДН) механически связанный с корпусом мачты телескопической; фиксатор транспортного положения первый (ФТП1); фиксатор транспортного положения второй (ФТП2); датчик высоты подъема (ДВП), в силовой редуктор подъемно-мачтового устройства дополнительно введена приборная ветвь, механически связывающая вал датчика высоты подъема (ДВП) с приводным винтом мачты телескопической. 3 ил.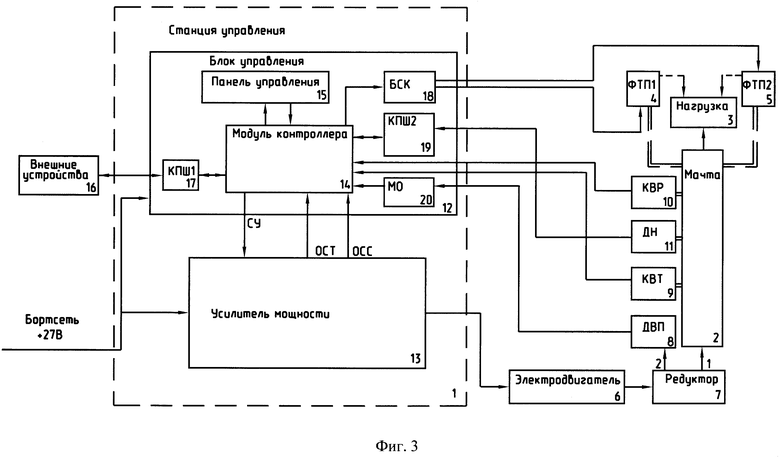
Подъемно-мачтовое устройство, содержащее блок управления, приводной электродвигатель, силовой редуктор, мачту телескопическую, нагрузку, концевой выключатель транспортного положения, концевой выключатель развернутого положения, отличающееся тем, что в него введены датчик наклона, механически связанный с корпусом мачты телескопической, фиксатор транспортного положения первый, фиксатор транспортного положения второй, датчик высоты подъема, станция управления, включающая в себя усилитель мощности, блок управления, в который дополнительно введены панель управления, модуль контроллера, модуль обработки, блок силовых ключей, контроллер последовательной шины первый, контроллер последовательной шины второй, при этом в силовой редуктор подъемно-мачтового устройства дополнительно введена приборная ветвь, механически связывающая вал датчика высоты подъема с приводным винтом мачты телескопической, причем панель управления, входящая в состав блока управления, электрически связана с модулем контроллера, который, в свою очередь, электрически связан с блоком силовых ключей, модулем обработки, контроллером последовательной шины первым, контроллером последовательной шины вторым, при этом блок силовых ключей электрически связан с фиксатором транспортного положения первым и фиксатором транспортного положения вторым, которые, с одной стороны, механически связаны с корпусом мачты телескопической, с другой стороны, с нагрузкой, обеспечивая ее механическую фиксацию в транспортном положении мачты телескопической, причем контроллер последовательной шины второй и модуль обработки блока управления электрически связаны соответственно с датчиком наклона мачты телескопической и датчиком высоты подъема мачты телескопической, при этом, с одной стороны, контроллер последовательной шины первый блока управления электрически связан с внешними устройствами, а блок управления и усилитель мощности станции управления связаны с бортсетью +27 В объекта, с другой стороны, блок управления через собственный модуль контроллера электрически связан с усилителем мощности, вращающим вал приводного электродвигателя, который через силовой редуктор обеспечивает подъем и опускание мачты телескопической в заданное внешними устройствами, панелью управления и датчиком высоты подъема положение, при этом концевой выключатель транспортного положения и концевой выключатель развернутого положения, с одной стороны, механически связаны с корпусом мачты телескопической и, с другой стороны, электрически связаны с модулем контроллера блока управления, в свою очередь, усилитель мощности электрически связан с модулем контроллера блока управления по сигналам обратных связей по току и скорости приводного электродвигателя.
| ПОДЪЕМНО-МАЧТОВОЕ УСТРОЙСТВО | 2011 |
|
RU2461923C1 |
| ТЕЛЕСКОПИЧЕСКАЯ МАЧТА | 2000 |
|
RU2198131C2 |
| ПОДЪЕМНО-МАЧТОВОЕ УСТРОЙСТВО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ | 2008 |
|
RU2373618C1 |
| Способ полуколичественного спектрального анализа | 1960 |
|
SU142055A1 |
| DE 4329715 C1, 23.02.1995 | |||
| МАЧТОВОЕ УСТРОЙСТВО | 2012 |
|
RU2496193C1 |

