Область техники, к которой относится изобретение
Изобретение относится к области железнодорожного транспорта, в частности к устройству крана машиниста, и предназначено для управления пневматическими и электропневматическими тормозами подвижного состава магистральных железных дорог, а именно тормозами грузовых и пассажирских поездов.
Уровень техники
Известен кран машиниста тормоза железнодорожного транспортного средства (патент №RU32738, МПК6 В60Т 15/04, 2003 г.), содержащий реле давления, имеющее уравнительную полость, связанную с уравнительным резервуаром крана машиниста, питательную полость, связанную с питательной магистралью, тормозную полость, связанную с тормозной магистралью, а также редуктор зарядного давления и стабилизатор для ликвидации сверхзарядного давления темпом мягкости и электропневматические клапаны торможения, отпуска, сверхзарядки с прямым сообщением питательной магистрали с уравнительной полостью реле давления, электропневматический клапан перекрыши, электропневматический клапан экстренного торможения и орган переключения со срывным поршнем. Реле давления содержит питательный клапан, связывающий в открытом состоянии питательную и тормозную полости, атмосферный клапан, связывающий в открытом состоянии тормозную полость с атмосферой. На каналах связи с тормозной магистралью, с питательной магистралью и на уравнительном резервуаре установлены датчики давления.
Питательный клапан реле давления, предназначенный для зарядки и отпуска тормозной магистрали, имеет проходное сечение, соответствующее отверстию диаметром 25 мм, тогда как тормозная магистраль поезда имеет проходное сечение диаметром 32 мм. Поэтому для обеспечения быстрой разрядки тормозной магистрали в положении экстренного положения предусмотрен срывной клапан с большим проходным сечением, управляемый электропневматическим клапаном. Для обеспечения сверхзарядки в первом положении рукоятки контроллера предназначен отдельный питательный клапан с большим проходным сечением, управляемый электропневматическим клапаном.
Для формирования сигналов на торможение и отпуск кран машиниста содержит семипозиционный контроллер, обеспечивающий все режимы управления тормозами поезда, и электронный блок, связанный с контроллером, электропневматическими клапанами, датчиками давления. Электронный блок связан с локомотивными устройствами безопасности, системами автоматического управления торможением, а также с системами радиоуправления, системами телеуправления железнодорожным транспортным средством. Рукоятка семипозиционного контроллера имеет положения сверхзарядки, поездное, перекрыши без питания, перекрыши с питанием, торможения поездов обычного веса и длины, торможения поездов повышенного веса и длины, экстренного торможения.
В конструкции крана машиниста по патенту №RU 32738 предусмотрено резервное пневматическое управление, которое состоит из устройства ручного резервного управления с тремя положениями переключающей рукоятки: отпуск, перекрыша и торможение, связанное с редуктором зарядного давления и переключательным устройством.
В случае перехода на ручное резервное управление переключательное устройство переводят в положение, при котором оно перекрывает сообщение электропневматических клапанов служебного торможения и служебного торможения поездов повышенной длины с уравнительным резервуаром и уравнительной полостью реле давления, а также одновременно сообщает устройство ручного резервного пневматического управления с уравнительным резервуаром и уравнительной полостью реле давления.
Недостатком известного устройства является наличие двух рукояток основного и резервного управления тормозом, усложняющих процесс управления краном машиниста, при этом в случае отключения питания или выхода из строя электронного управления переход на резервное управление происходит вручную с помощью перевода ручки переключательного устройства после перевода рукоятки семипозиционного контроллера в положение "Экстренное торможение", что увеличивает время реакции машиниста на аварийную ситуацию и снижает безопасность движения поезда. Кроме того, в положении перекрыши в этом кране возможно повышение давления в уравнительном резервуаре из-за термодинамического эффекта, что может вызвать самопроизвольный отпуск тормоза.
Кроме того, когда осуществляется работа семипозиционным контроллером, рукоятка крана резервного управления должна находиться в тормозном положении. Изготовителем рекомендуется опломбировать рукоятку в этом положении, так как ее перемещение во время действия семипозиционного контроллера может вызвать несанкционированное торможение.
Наиболее близким по совокупности существенных признаков является кран машиниста тормоза железнодорожного транспортного средства (патент №RU 2444454, МПК6 В60Т 15/04, 2012 г.), содержащий реле давления, которое имеет уравнительную полость, связанную с уравнительным резервуаром крана машиниста, питательную полость, связанную с питательной магистралью, тормозную полость, связанную с тормозной магистралью, питательный клапан, связывающий в открытом состоянии питательную и тормозную полости, атмосферный клапан, связывающий в открытом состоянии тормозную полость с атмосферой, а также содержит электронный редуктор зарядного давления, имеющий микроконтроллер с заложенной в нем программой, составленной на основе алгоритма автоматического срабатывания электропневматического клапана отпуска на установление в уравнительной полости и уравнительном резервуаре зарядного давления заданной величины в соответствии с установленными техническими требованиями, и связанный с трехпозиционным контроллером и электронным блоком управляющей части. На каналах связи с тормозной магистралью, с питательной магистралью и на уравнительном резервуаре установлены датчики давления. Кран машиниста содержит набор электропневматических клапанов и пневматических приборов, предназначенных для выполнения процессов торможения и отпуска в тормозной магистрали при электронном управлении. Процесс зарядки воздухом уравнительного резервуара, а следовательно, тормозной магистрали осуществляется электропневматическим клапаном отпуска. Процесс торможения, т.е. разрядки уравнительного резервуара и тормозной магистрали, осуществляется двумя клапанами торможения, один из которых дополнительный клапан торможения, который работает в импульсном режиме для обеспечения определенного темпа разрядки уравнительного резервуара. Для осуществления торможения поездов повышенного веса и длины предназначен отдельный электропневматический клапан торможения длинносоставных поездов. Перекрыша осуществляется электропневматическим клапаном перекрыши. Для выполнения экстренного торможения служит электропневматический клапан экстренного торможения с органом переключения, имеющим срывной поршень. Для зарядки тормозной магистрали сверхзарядным давлением предназначен электропневматический клапан сверхзарядки с питательным органом и устройством переключения. Процесс ликвидации сверхзарядного давления темпом мягкости осуществляется путем формирования электронным блоком сигнала импульсной подачи напряжения на дополнительный электропневматический клапан торможения, который сообщает уравнительный резервуар с атмосферой.
Для формирования сигналов на торможение и отпуск кран машиниста содержит семипозиционный контроллер, обеспечивающий режимы торможения и отпуска аналогично кранам машиниста, используемым на современных локомотивах. Семипозиционный контроллер имеет положения сверхзарядки, поездное, перекрыши без питания, перекрыши с питанием, торможения поездов обычного веса и длины, торможения поездов повышенного веса и длины, экстренного торможения. Также в состав известного крана машиниста входит автоматический задатчик, состоящий из трехпозиционного контроллера с микроконтроллером с программой, составленной на основе алгоритма фиксации отпускной и тормозной позиций и задающего органа, снабженного двумя рукоятками «Режим работы» и «Ступень торможения», а также микроконтроллером с программами, составленными на основе алгоритмов срабатывания крана машиниста при требуемом режиме отпуска и требуемых ступенях торможения. Семипозиционный контроллер и автоматический задатчик связаны с электронным блоком и электронным редуктором. В микроконтроллер электронного блока заложены также программы, составленные на основе алгоритмов установления сверхзарядного давления в уравнительном резервуаре и автоматического срабатывания на процесс ликвидации сверхзарядного давления темпом мягкости дополнительного электропневматического клапана торможения.
В конструкции крана машиниста предусмотрено устройство резервного пневматического управления, включающее в себя устройство распределения пневматических сигналов, имеющее три позиции рукоятки: отпуск, перекрыша и торможение, редуктор зарядного давления и дополнительный резервуар, и обеспечивающее при резервном управлении либо наполнение воздухом уравнительной полости реле давления из уравнительного резервуара, либо ее перекрытия, либо выпуск воздуха из уравнительной полости в атмосферу.
В известном кране машиниста модуль управления выполнен в виде семипозиционного контроллера, трехпозиционного контроллера и устройства распределения пневматических сигналов, которые установлены под одной панелью. Переключение крана машиниста на пневматический резерв осуществляется вручную переключательным устройством.
При электронном управлении трехпозиционным контроллером необходимо перевести семипозиционный контроллер в положение «Перекрыша с питанием». В случае любого воздействия на рукоятку семипозиционного контроллера управление трехпозиционным контроллером блокируется. При этом управление передается семипозиционному контроллеру. Единовременно активным может быть только один из контроллеров.
Для зарядки тормоза зарядным давлением машинист устанавливает трехпозиционный контроллер автоматического задатчика режима отпуска и величин ступеней торможения в отпускную позицию, задающий орган - на режим отпуска зарядным давлением, и включает в действие электронный редуктор, задавая требуемую величину зарядного давления, отражаемую на экране. Установка зарядного давления осуществляется с помощью органов ввода данных на электронном редукторе: нажатием соответствующей кнопки с одновременным вращением ручки изменения величины.
Для осуществления процесса торможения устанавливают семипозиционный контроллер управления тормозом в положение перекрыши с питанием. Трехпозиционный контроллер устанавливают в тормозную позицию, а на задающем органе соответствующей рукояткой устанавливается величина требуемой ступени торможения, отражаемая на его экране.
Тем самым для выполнения процессов торможения и отпуска при управлении поезда машинистом выполняются несколько действий различными органами управления.
Недостатком является ручной переход на резервное управление, который осуществляется машинистом поезда посредством рычага переключательного устройства после остановки поезда, что увеличивает время перехода на резервное управление в случае аварийной ситуации. Такая конструкция требует от машиниста бдительности и повышенной реакции при возникновении аварийной ситуации. Кроме того, наличие двух отдельных контроллеров управления, имеющих одинаковые функциональные возможности, а также дополнительных органов переключения и ввода величин, усложняет процесс управления тормозом поезда.
Раскрытие изобретения
Заявляемый кран машиниста тормоза железнодорожного транспортного средства решает задачу повышения безопасности движения поезда, предотвращения сбоев в работе тормозного оборудования поезда, облегчение и упрощение процесса управления краном машиниста.
Технический результат, получаемый при осуществлении предлагаемого изобретения, заключается в обеспечении краном машиниста автоматического, без вмешательства машиниста, перехода на резервное пневматическое управление при выходе из строя электронного управления без нарушения протекания тормозных процессов в тормозной магистрали поезда с возможностью традиционного управления пневматическими тормозами аналогично применяемому на современных локомотивах крану машиниста усл. №395, а также высокой точности задания и выполнения ступеней торможения и отпуска, автоматической перекрыши после выполнения торможения и высокой скорости распространения отпускной и тормозной волны.
Указанный технический результат достигается тем, что в кране машиниста тормоза железнодорожного транспортного средства, содержащего реле давления, имеющее уравнительную полость, питательную полость, связанную с питательной магистралью, тормозную полость, связанную с тормозной магистралью, питательный клапан, связывающий в открытом состоянии питательную и тормозную полости, атмосферный клапан, связывающий в открытом состоянии тормозную полость с атмосферой; электропневматические клапаны, датчики давления, установленные на уравнительной полости реле давления, пневмолинии связи реле давления с тормозной магистралью и на уравнительном резервуаре; устройство резервного пневматического управления, переключающее устройство, а также модуль управления с поворотной рукояткой и электронный блок, имеющий микроконтроллер с заложенными в нем программами, составленными на основе алгоритмов срабатывания крана машиниста при требуемых режимах отпуска и ступенях торможения, установления сверхзарядного давления с последующей его ликвидацией до зарядного, с непрерывной индикацией величин давления в уравнительной полости реле давления, тормозной магистрали и уравнительном резервуаре, при этом электронный блок связан с датчиками давления и с электропневматическими клапанами, при этом согласно изобретению модуль управления включает в себя электронную часть, выполненную с возможностью выработки электронных сигналов в зависимости от положения поворотной рукоятки с последующей их передачей по CAN-интерфейсу на электронный блок, и пневматическую часть, выполненную с возможностью выработки управляющих пневмосигналов в зависимости от положения поворотной рукоятки с последующей подачей их с помощью сигнальных пневмолиний на устройство резервного пневматического управления, при этом поворотная рукоятка выполнена с возможностью одновременного задания для электронной и пневматической частей одинаковых режимов работы крана машиниста; уравнительная полость реле давления связана по крайней мере с одним впускным и по крайней мере с одним выпускным электропневматическими клапанами, выполненными с возможностью управления ими электронным блоком для установления в уравнительной полости давления заданной величины с последующим получением аналогичного давления в тормозной магистрали посредством реле давления; устройство резервного пневматического управления состоит из уравнительного резервуара и связанного с ним пневмолинией блока клапанов пневматического резерва, содержащего редуктор зарядного давления, стабилизатор, коммутирующие пневматические клапаны, клапан обратной связи, клапаны служебного и экстренного торможения, при этом уравнительный резервуар связан с впускным и выпускным уравнительными электропневматическими клапанами, выполненными с возможностью управления ими электронным блоком для установления в уравнительном резервуаре давления, равного давлению в тормозной магистрали; а устройство резервного пневматического управления связано через переключающее устройство с уравнительной полостью реле давления, при этом переключающее устройство выполнено в виде отсечного пневматического клапана, связанного по крайней мере с одним управляющим электропневматическим клапаном, и выполненного с возможностью разобщения уравнительной полости реле давления и устройства резервного пневматического управления при подаче напряжения на управляющий электропневматический клапан и их соединения при пропадании напряжения.
Кроме того, кран машиниста содержит клапан аварийного экстренного торможения, снабженный спускным пневматическим клапаном, выполненным с возможностью выпуска воздуха в атмосферу из сигнальной пневмолинии положения «Поездное» поворотной рукоятки модуля управления.
Кроме того, электронная часть модуля управления состоит из датчика положений поворотной рукоятки, имеющего механическую связь через вал с поворотной рукояткой, и электронной платы, имеющей микроконтроллер с заложенной в нем программой определения положений поворотной рукоятки по сигналу от датчика положений в позициях отпуска и торможения и связанной посредством CAN-интерфейса с электронным блоком.
Кроме того, пневматическая часть модуля управления включает в себя набор управляющих пневмораспределителей, выполненных с возможностью воздействия на них командных кулачков, жестко связанных через вал с поворотной рукояткой.
Кроме того, на уравнительном резервуаре установлен по крайней мере один манометр.
Кроме того, впускной и выпускной электропневматические клапаны уравнительного резервуара выполнены с возможностью управления ими электронным блоком с помощью импульсных электросигналов.
Кроме того, выпускной и впускной электропневматические клапаны реле давления выполнены с возможностью управления ими электронным блоком с помощью импульсных электросигналов.
Кроме того, питательный и атмосферный клапаны реле давления имеют проходное сечение, равное диаметру трубопровода тормозной магистрали.
Кроме того, под уравнительным поршнем реле давления выполнена подпоршневая полость, при этом реле давления содержит распределительный электропневматический клапан, который установлен с возможностью обеспечения пневматической связи подпоршневой полости реле давления с тормозной полостью в выключенном состоянии, с уравнительной полостью - во включенном состоянии, и выполненный с возможностью управления им электронным блоком.
Кроме того, уравнительная полость реле давления снабжена аварийным пневматическим выпускным клапаном с увеличенным проходным сечением.
Кроме того, пневматические клапаны служебного и экстренного торможения снабжены дроссельными отверстиями с возможностью обеспечения темпов выпуска воздуха при служебном и экстренном торможении.
Кроме того, электронный блок связан посредством CAN-интерфейса с устройством ввода/вывода данных, выполненным в виде информационного дисплея с задающими параметры кнопками.
Отличительной особенностью заявленного крана машиниста тормоза железнодорожного транспортного средства является то, что в заявленном устройстве одновременно вырабатываются электронные и пневматические управляющие сигналы одним модулем управления. Пневматические сигналы подаются по сигнальным пневмолиниям на устройство резервного пневматического управления. Электронные сигналы подаются на электронный блок, который с помощью микроконтроллера обрабатывает полученные сигналы в соответствии с заложенными в нем программами, составленными на основе алгоритмов автоматического срабатывания электропневматических клапанов, установленных на реле давления и уравнительном резервуаре:
- на установление в уравнительной полости реле давления, в уравнительном резервуаре устройства резервного пневматического управления и в тормозной магистрали поезда зарядного давления заданной величины;
- на установление сверхзарядного давления в уравнительной полости реле давления, в уравнительном резервуаре устройства резервного пневматического управления и в тормозной магистрали поезда в соответствии с зафиксированным в энергонезависимой памяти микроконтроллера электронного блока значением сверхзарядного давления;
- на ликвидацию сверхзарядного давления темпом мягкости в уравнительной полости реле давления, в уравнительном резервуаре устройства резервного пневматического управления и в тормозной магистрали поезда;
- задание темпов служебного и экстренного торможения.
В результате чего происходит формирование электронным блоком импульсных сигналов на включение электропневматических клапанов реле давления и уравнительного резервуара.
В зависимости от выполняемого процесса происходит наполнение сжатым воздухом уравнительной полости реле давления либо выпуск сжатого воздуха из нее в атмосферу. Импульсная подача напряжения на впускной и выпускной электропневматические клапаны, связанные с уравнительной полостью реле давления, обеспечивает точную величину проходного сечения открывающихся клапанов для получения требуемого в уравнительной полости давления. При перемещении поршня со штоком в результате получаемой разницы давлений в уравнительной и подпоршневой полостях открывается либо питательный, либо атмосферный клапаны реле давления, сообщая тормозную магистраль с питательной магистралью или с атмосферой. Тем самым в тормозной магистрали устанавливается давление, аналогичное давлению в уравнительной полости реле давления. При выравнивании давлений в уравнительной и подпоршневой полостях питательный и атмосферный клапаны закрываются.
Благодаря точному дозированию поступления или выпуска воздуха происходит автоматическое поддержание заданной величины давления в уравнительной полости и, соответственно, в тормозной магистрали.
Для постоянного поддержания давления в уравнительном резервуаре, равного давлению в тормозной магистрали поезда, предусмотрены впускной и выпускной уравнительные электропневматические клапаны. Это необходимо для постоянной готовности уравнительного резервуара к управлению реле давления через блок клапанов пневматического резерва в случае автоматического перехода в любой момент времени с электронного управления на резервное пневматическое управление без нарушения процессов, происходящих в тормозной магистрали при текущем режиме работы крана машиниста. Микроконтроллер электронного блока сравнивает показания датчиков давления, установленных на уравнительном резервуаре и на пневмолинии связи реле давления с тормозной магистралью поезда, и формирует импульсные сигналы на включение впускного или выпускного уравнительных электропневматических клапанов в зависимости от выполняемого процесса в тормозной магистрали. Для увеличения давления в уравнительном резервуаре микроконтроллер электронного блока формирует сигнал на открытие впускного уравнительного электропневматического клапана для пропуска сжатого воздуха из питательной магистрали в уравнительный резервуар. Для уменьшения давления в уравнительном резервуаре открывается выпускной уравнительный электропневматический клапан, выпуская воздух из уравнительного резервуара в атмосферу. В случае пропадания электропитания при аварийной ситуации уравнительные электропневматические клапаны отключаются.
При электронном управлении электронный блок осуществляет непрерывную подачу напряжения на управляющий электропневматический клапан переключающего устройства, который при включенном состоянии перекрывает подачу воздуха из питательной магистрали на отсечной пневматический клапан. Отсечной клапан остается в исходном закрытом состоянии, разъединяя уравнительный резервуар и блок клапанов пневматического резерва с уравнительной полостью реле давления. В случае отключения электропитания или выхода из строя электронного управления, подача напряжения на управляющий электропневматический клапан прекращается, при этом он переходит в открытое состояние и подает воздух из питательной магистрали на отсечной пневматический клапан, который соединяет уравнительную полость реле давления с уравнительным резервуаром и блоком клапанов пневматического резерва, осуществляя тем самым переход на резервное пневматическое управление.
При резервном пневматическом управлении реле давления регулирует давление воздуха в тормозной магистрали в зависимости от заданного давления воздуха в уравнительном резервуаре, которое устанавливается и поддерживается блоком клапанов пневматического резерва.
Такое исполнение предлагаемого крана машиниста обеспечивает автоматический переход на резервное пневматическое управление при выходе из строя электронного управления без нарушения протекания тормозных процессов в тормозной магистрали поезда. Отсутствует необходимость остановки поезда, увеличивающая время нахождения поезда в пути. В случае отключения питания электронного управления или выхода его из строя не требуется время для реакции машиниста на аварийную ситуацию с целью перехода на резервное управление, что повышает безопасность движения поезда, предотвращает сбои в работе тормозного оборудования поезда, облегчает и упрощает процесс управления краном машиниста.
При этом импульсная подача электронным блоком сигналов на включение электропневматических клапанов, связанных с уравнительной полостью реле давления, обеспечивает высокую точность задания и выполнения ступеней торможения и отпуска.
При этом использование распределительного электропневматического клапана, управляемого электросигналами от электронного блока и связывающего во включенном состоянии уравнительную полость с подпоршневой полостью, обеспечивает автоматическую перекрышу после выполнения торможения.
При этом большое сечение питательного и атмосферного клапанов реле давления обеспечивает высокую скорость распространения отпускной и тормозной волны в тормозной магистрали.
При этом значительно упрощается основное электронное управление, а также переход на резервное пневматическое управление и его работа за счет исключения дополнительных органов управления и переключателей. При этом выполнение режимов работы крана машиниста при резервном пневматическом управлении: «Поездное», «Перекрыша с питанием», «Служебное торможение» и «Экстренное торможение», аналогично выполнению соответствующих режимов работы краном машиниста усл. №395, поскольку устройство резервного пневматического управления заявленного крана машиниста содержит редуктор зарядного давления, стабилизатор, коммутирующие пневматические клапаны, клапан обратной связи, клапаны служебного и экстренного торможения, используемые также в конструкции известного крана машиниста.
Краткое описание чертежей
Сущность изобретения поясняется описанием конкретного примера его выполнения и иллюстрируется чертежами, где на:
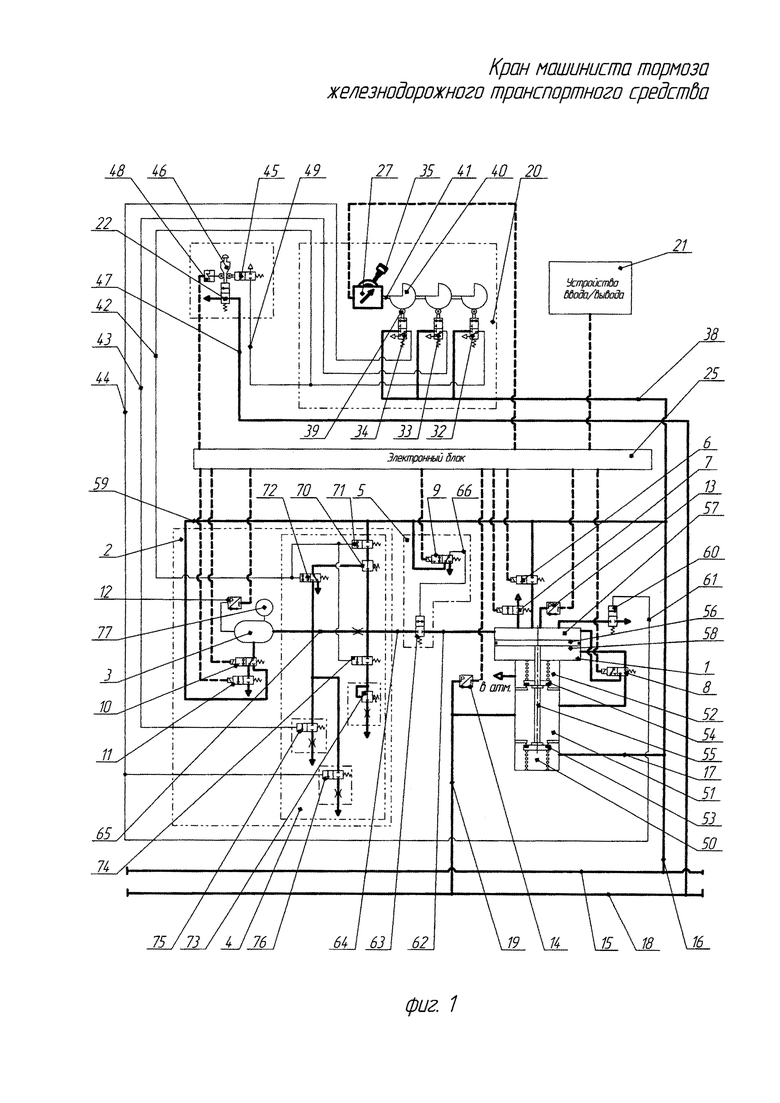
фиг. 1 схематично изображено устройство предлагаемого крана машиниста тормоза железнодорожного транспортного средства (пример его выполнения);
фиг. 2 - общий вид модуля управления.
Осуществление изобретения
Кран машиниста состоит из реле давления 1, устройства резервного пневматического управления 2, выполненного в виде связанного с уравнительным резервуаром 3 блока клапанов пневматического резерва 4, переключающего устройства 5, электропневматических клапанов 6, 7, 8, пневматически связанных с реле давления 1, управляющего электропневматического клапана 9 и уравнительных электропневматических клапанов 10, 11, пневматически связанных с уравнительным резервуаром 3, а также датчиков давления 12, 13 и 14, установленных соответственно на уравнительном резервуаре, уравнительной полости реле давления и пневмолинии связи реле давления с тормозной магистралью.
Реле давления 1 подключено к питательной магистрали 15 пневмолиниями 16 и 17, а к тормозной магистрали 18 - пневмолинией 19.
В предложенном варианте исполнения кран машиниста включает в себя модуль управления 20 тормозом поезда, устройство ввода/вывода 21, клапан аварийного экстренного торможения 22, электронный блок 25 с микроконтроллером, например типа ATmega8A-AU семейства AVR MEGA, с заложенными в нем программами, составленными на основе алгоритмов срабатывания крана машиниста при требуемых режимах отпуска и ступенях торможения, установления сверхзарядного давления с последующей его ликвидацией до зарядного, с непрерывной индикацией величин давления в уравнительной полости реле давления 1, тормозной магистрали 18 и уравнительном резервуаре 3, и связан посредством CAN-интерфейса с устройством ввода/вывода 21, клапаном аварийного экстренного торможения 22, посредством электрических кабелей - с датчиками давления 12, 13, 14, и управляющими электропневматическими клапанами 6, 7, 8, 9, 10, 11. Устройство ввода/вывода 21 выполнено в виде графического дисплея, например VFD 320*240, с задающими параметры кнопками.
Модуль управления 20 включает в себя размещенные в корпусе 26 (фиг. 1, 2) электронную часть, состоящую из электронного датчика положений 27, с электронной платой 28, имеющей микроконтроллер с заложенной в нем программой определения положений поворотной рукоятки по сигналу от датчика положений 27 в управляющих позициях отпуска, торможения, «перекрыши» и связанной с электронным блоком 25 с помощью CAN-интерфейса 29; резервную пневматическую часть, состоящую из набора управляющих пневмораспределителей 32, 33, 34, определяющих режимы работы крана машиниста для устройства резервного пневматического управления; поворотную рукоятку 35, установленную на монтажной панели 36, являющейся верхней частью корпуса 26. На монтажной панели 36 также установлена декоративная накладка 37 с размеченной шкалой положений поворотной рукоятки 35 при электронном и пневматическом управлении крана машиниста.
Электронный датчик положений 27 электронной части выполнен с возможностью выработки определенного электросигнала в зависимости от положения поворотной рукоятки 35, задающей управляющие позиции согласно шкале положений на декоративной накладке 37, и передачи на электронную плату 28, выполненную с возможностью обработки полученных от датчика 27 сигналов и передачи их по CAN-интерфейсу 29 на электронный блок 25. В качестве электронного датчика 27 могут быть использованы датчики угла поворота различных типов с углом измерения не менее угла поворота рукоятки 35, например резистор переменный СП5-40А.
Управляющие пневмораспределители положения «Поездное» 32, положения «Служебное торможение» 33, положения «Экстренное торможение» 34 пневматической части модуля управления 20 соединены с питательной магистралью 15 пневмолиниями 16 и 38 и выполнены с обеспечением подачи сжатого воздуха из питательной магистрали 15 на блок клапанов пневматического резерва 4 при механическом воздействии на их роликовые толкатели 39 командных кулачков 40 в соответствии с положением поворотной рукоятки 35 (фиг. 1, 2). Командные кулачки 40 жестко связаны через вал 41 с поворотной рукояткой 35 и расположены таким образом, чтобы в определенном положении рукоятки 35 один из кулачков 40 взаимодействовал с роликовым толкателем 38 соответствующего пневмораспределителя 32, 33 или 34, осуществляя его срабатывание. Количество командных кулачков 40 равно количеству пневмораспределителей 32, 33, 34 и соответствует режимам работы крана машиниста при резервном пневматическом управлении. При режиме работы крана машиниста «Перекрыша с питанием» поворотная рукоятка управления 35 устанавливается в положение, при котором командные кулачки 40 не воздействуют на управляющие пневмораспределители 32, 33, 34. Вместе с тем количество командных кулачков и пневмораспределителей может изменяться в зависимости от требуемого количества режимов работы крана машиниста для ведения поезда.
Поворотная рукоятка 35 через вал 41 имеет механическую связь с электронным датчиком положений 27. При такой конструкции каждая управляющая позиция пневматической части модуля управления 20 совпадает с одноименной управляющей позицией электронной части и определяется одним общим для резервной и электронной частей положением поворотной рукоятки 35. Иными словами, поворотная рукоятка 35 выполнена с возможностью воздействия на электронную и пневматическую части модуля управления 20 и одновременного задания для электронной и пневматической частей одинаковых режимов работы крана машиниста.
Для подачи сжатого воздуха от пневмораспределителей 32, 33 и 34 к устройству резервного пневматического управления 2 предусмотрены сигнальные пневмолинии положения «Поездное» 42, положения «Служебное торможение» 43, положения «Экстренное торможение» 44, связывающие пневмораспределители с блоком клапанов пневматического резерва 4, который вместе с уравнительным резервуаром 3 входит в состав устройства резервного пневматического управления 2.
Таким образом, модуль управления 20 состоит из электронной части, выполненной с возможностью выработки электронных сигналов в зависимости от положения поворотной рукоятки 35 с последующей их подачей по CAN-интерфейсу на электронный блок 25, пневматической части, выполненной с возможностью выработки управляющих пневмосигналов в зависимости от положения поворотной рукоятки 35 с последующей их подачей с помощью сигнальных пневмолиний 42, 43 или 44 на устройство резервного пневматического управления 2, и поворотной рукоятки 35 модуля управления 20, выполненной с возможностью одновременного задания одинаковых режимов работы крана машиниста для электронной и пневматической частей модуля управления (фиг. 1).
В предложенном варианте выполнения изобретения в модуле управления 25 предусмотрено шесть положений поворотной рукоятки 35, соответствующих режимам работы крана машиниста при электронном управлении: «Отпуск и зарядка», «Поездное», «Перекрыша без питания», «Перекрыша с питанием», «Служебное торможение» и «Экстренное торможение». Для пневматической части модуля управления 20 задействованы четыре положения поворотной рукоятки 35, соответствующие режимам работы крана машиниста при резервном пневматическом управлении: «Поездное», «Перекрыша с питанием», «Служебное торможение» и «Экстренное торможение», и совпадающие с аналогичными режимами работы электронной части.
Для быстрой разрядки тормозной магистрали 18 в кране машиниста предусмотрен клапан аварийного экстренного торможения 22, имеющий фигурный нажимной шток 46 с кнопкой и соединенный с тормозной магистралью пневмолинией 47. На клапане экстренного торможения 22 дополнительно установлены спускной пневматический клапан 45 и электрический выключатель 48, имеющие механическое управление в виде роликовых толкателей.
Клапан аварийного экстренного торможения 22 выполнен с возможностью выпуска воздуха из тормозной магистрали 18 по пневмолинии 47 в атмосферу при нажатии на фигурный шток 46 с одновременным воздействием фигурным штоком 46 на роликовый рычаг спускного клапана 45 и роликовый толкатель электрического выключателя 48.
Электрический выключатель 48 связан с электронный блоком 25 электрическим кабелем. Спускной пневматический клапан 45 связан посредством пневмолинии 49 с сигнальной пневмолинией 42 положения «Поездное» с возможностью выпуска воздуха из нее в атмосферу для отключения от питательной магистрали 15 и уравнительного резервуара 3 блока клапанов пневматического резерва 4 при пневматическом резервном управлении в положении рукоятки "Поездное".
В нашем примере реле давления 1 содержит питательную полость 50, связанную с питательной магистралью 15 посредством пневмолиний 16 и 17; тормозную полость 51, связанную с тормозной магистралью 18 посредством пневмолинии 19; атмосферную полость 52 для выхода воздуха из тормозной магистрали 18 в атмосферу. В питательной полости 50 установлен подпружиненный питательный клапан 53, а в атмосферной полости 52 соосно с питательным клапаном 53 установлен подпружиненный атмосферный клапан 54. Клапаны связаны между собой штоком 55 с жестко закрепленным на нем уравнительным поршнем 56. Подпружиненные питательный 53 и атмосферный 54 клапаны выполнены с возможностью под воздействием поршня 56 со штоком 55 сообщать в открытом состоянии тормозную полость 51 с питательной 50 или атмосферной 52 полостями соответственно. Уравнительный поршень 56 установлен с возможностью перемещения в герметично закрытой полости и образует над собой уравнительную полость 57, а под собой - подпоршневую полость 58.
Уравнительная полость 57 реле давления 1 имеет пневматическую связь с датчиком давления 13, а также впускным 6, выпускным 7 и распределительным 8 электропневматическими клапанами, управляемыми электрическими сигналами, подаваемыми электронным блоком 25 в зависимости от заданных режимов торможения, отпуска или «перекрыши». Электропневматический впускной клапан 6 в открытом состоянии связывает уравнительную полость 57 реле давления 1 с питательной магистралью 15 через пневмолинии 16 и 59. Электропневматический выпускной 7 клапан связывает в открытом состоянии уравнительную полость 57 с атмосферой. Электропневматический распределительный клапан 8 в обесточенном состоянии связывает между собой подпоршневую 58 полость с тормозной 51 полостью реле давления 1, а во включенном состоянии - подпоршневую 58 полость с уравнительной 57.
При этом электропневматические клапаны 6, 7 управляются путем подачи на них электронным блоком 25 импульсных электрических сигналов для установления в уравнительной полости 57 давления заданной величины, необходимого для воздействия через уравнительный поршень 56 со штоком 55 на питательный 53 или атмосферный 54 подпружиненные клапаны реле давления 1 с обеспечением необходимой величины их проходного сечения и продолжительности открытия для установления заданного давления в тормозной магистрали 18.
С целью исключения выхода из строя электронного управления крана машиниста в случае возможной неисправности электропневматических клапанов 6 и 7 предусмотрен вариант дублирования этих клапанов дополнительными электропневматическими клапанами с теми же функциями подачи воздуха из питательной магистрали в уравнительную полость реле давления и выпуска воздуха из нее в атмосферу.
Таким образом, уравнительная полость 57 реле давления 1 пневматически связана по крайней мере с одним впускным 6 и по крайней мере с одним выпускным 7 электропневматическими клапанами, выполненными с возможностью установления электронным блоком 25 в уравнительной полости 57 давления заданной величины с последующим установлением соответствующего давления посредством реле давления 1 в тормозной магистрали 18.
Кроме электропневматических клапанов 6, 7, 8 уравнительная полость 57 пневматически связана с аварийным пневматическим выпускным клапаном 60, связанным пневмолиниями 61 и 44 с управляющим пневмораспределителем 34 «Экстренного торможения» пневматической части модуля управления 20 и имеющим увеличенное проходное сечение для быстрого выпуска воздуха из уравнительной полости 57 реле давления 1 в атмосферу при подаче на него управляющего пневматического сигнала от модуля управления 20 при экстренном торможении.
Уравнительная 57 полость связана посредством пневмолинии 62 с отсечным пневматическим клапаном 63 переключающего устройства 5, который в свою очередь связан пневмолинией 64 с устройством пневматического резерва 2, выполненным в виде блока клапанов пневматического резерва 4, связанного пневмолинией 65 с уравнительным резервуаром 3.
Отсечной пневматический клапан 63 перекрывает в нерабочем состоянии сообщение между устройством резервного пневматического управления 2 и уравнительной полостью 57 реле давления 1. Отсечной пневматический клапан 63 связан пневмолинией 66 с управляющим электропневматическим клапаном 9 переключающего устройства 5, который управляется электрическим сигналом, подаваемым электронным блоком 25, и выполнен с возможностью приведения пневматического клапана 63 в рабочее состояние посредством подачи воздуха из питательной магистрали 15 по пневмолиниям 16 и 59.
Таким образом, устройство резервного пневматического управления 2, выполненное в виде связанного пневмолинией 65 с уравнительным резервуаром 3 блока клапанов пневматического резерва 4, связано с уравнительной полостью 57 реле давления 1 через переключающее устройство 5, выполненное в виде отсечного пневматического клапана 63, пневматически связанного с управляющим электропневматическим клапаном 9. При этом управляющий электропневматический клапан 9 установлен с возможностью подвода сжатого воздуха из питательной магистрали 15 по пневмолиниям 16 и 59 к отсечному клапану 63 в случае прекращения подачи на него напряжения (при резервном пневматическом управлении) и разобщения пневмолиний 62 и 64, с прекращением подвода воздуха к отсечному клапану 63 в случае, если электропневматический клапан 9 находится под напряжением (при электронном управлении).
Одно из требований к конструкции крана машиниста с электронным и резервным пневматическим управлением - это исключение вероятности одновременной работы электронного и резервного пневматического управления. Для исключения соединения уравнительного резервуара 3 с реле давления 1 в случае возможной неисправности управляющего электропневматического клапана 9 предусмотрен вариант дублирования этого клапана дополнительным электропневматическим клапаном для гарантированной защиты от подачи сжатого воздуха из питательной магистрали 15 на отсечной пневматический клапан 63 и его открытия при электронном управлении.
Таким образом, переключающее устройство 5 выполнено в виде отсечного пневматического клапана 63, связанного по крайней мере с одним управляющим электропневматическим клапаном 9, и выполненного с возможностью разобщения уравнительной полости 57 реле давления 1 и устройства резервного пневматического управления 2 при подаче напряжения на управляющий электропневматический клапан 9 и их соединения при пропадании напряжения.
Блок клапанов пневматического резерва 4, входящий в состав устройства резервного пневматического управления 2, состоит из: редуктора зарядного давления 70 с коммутирующим пневматическим клапаном 71, пневматическим клапаном 72 обратной связи по давлению редуктора 70 с уравнительным резервуаром 3; стабилизатора 73 с коммутирующим пневматическим клапаном 74; пневматического клапана 75 положения «Служебное торможение» с дроссельным отверстием, сечение которого обеспечивает темп выпуска воздуха из уравнительного резервуара 3 при служебном торможении; пневматического клапана 76 положения «Экстренное торможение» с дроссельным отверстием, сечение которого обеспечивает темп выпуска воздуха из уравнительного резервуара 3 при экстренном торможении. При этом редуктор зарядного давления 70 соединен с уравнительным резервуаром 3 пневмолинией 65, сечение которой соответствует темпу зарядки тормозной магистрали 17 в поездном положении. Пневматические клапаны 71, 72 и 74 связаны с сигнальной пневмолинией 42 положения «Поездное», клапан 75 связан с сигнальной пневмолинией 43 положения «Служебное торможение», клапан 76 связан с сигнальной пневмолинией 44 положения «Экстренное торможение». Стабилизатор 73 установлен для обеспечения ликвидации сверхзарядки в уравнительном резервуаре 3 в случае аварийного перехода с электронного управления на резервное пневматическое управление при переводе рукоятки управления 35 из положения "Отпуск и зарядка" в положение "Поездное".
Для измерения давления на уравнительном резервуаре 3 помимо датчика давления 12, связанного с электронным блоком 25, установлен манометр 77, на показания которого машинист ориентируется при резервном пневматическом управлении.
Уравнительный резервуар 3 пневматически связан с впускным 10 и выпускным 11 уравнительными электропневматическими клапанами, управляемыми импульсными электрическими сигналами от электронного блока 25 в зависимости от показаний датчика давления 12 уравнительного резервуара и датчика давления 14 тормозной магистрали.
Электромагнитный впускной 10 клапан выполнен с возможностью во включенном состоянии сообщать уравнительный резервуар 3 с питательной магистралью 15 посредством пневмолиний 16 и 59. Электропневматический выпускной 11 клапан выполнен с возможностью сообщения уравнительного резервуара 3 с атмосферой.
Кран машиниста тормоза железнодорожного транспортного средства действует согласно предложенному решению следующим образом.
При включении крана машиниста с подачей напряжения электронный блок 25 подает сигнал на включение через CAN-интерфейсы на устройство ввода/вывода 21 и модуль управления 20.
Сжатый воздух поступает из питательной магистрали 15 по пневмолиниям 16 и 17 в питательную полость 50 реле давления 1. Одновременно воздух подается по пневмолиниям 16 и 38 на модуль управления 25, по пневмолиниям 16 и 59 на впускной электропневматический клапан 6 реле давления 1, электропневматический клапан 9 переключающего устройства 5, на пневматический клапан 71 блока клапанов пневматического резерва 4 и впускной электропневматический клапан 10 уравнительного резервуара 3.
Введенные с помощью устройства ввода/вывода 21 в соответствующие пункты меню величины зарядного давления, свехзарядного давления, минимальная величина первой ступени торможения, время ликвидации сверхзарядного давления записываются в энергонезависимую память микроконтроллера электронного блока 25 и остаются постоянными до очередной ручной корректировки. Кроме введенных параметров в микроконтроллере электронного блока 25 программно заложены минимальные величины разрядки и зарядки тормозной магистрали 18 при автоматическом выполнении второй и последующих ступеней торможения и отпуска. Управление электропневматическими клапанами 6, 7, 8, 9, 10, 11, а также обработку сигналов от датчиков давления 12, 13, 14 осуществляет электронный блок 25. При этом осуществляется непрерывная индикация величин давления в уравнительном резервуаре 3, тормозной магистрали 18 и уравнительной полости 57 реле давления 1 электронным блоком 25 от датчиков давления 12, 13, 14.
Для зарядки тормоза локомотива зарядным давлением поворотную рукоятку 35 модуля управления 20 устанавливают в положение «Поездное». Электронный датчик положений 27 передает соответствующий сигнал с помощью электронной платы по CAN-интерфейсу в электронный блок 25. Микроконтроллер электронного блока 25 при получении сигнала от модуля управления 20 формирует импульсный сигнал на включение электропневматического впускного клапана 6 реле давления 1, и сжатый воздух из питательной магистрали по пневмолиниям 16 и 59 поступает в уравнительную полость 57 реле давления 1. В момент зарядки тормоза в тормозной магистрали 18, а также связанной с ней через электропневматический распределительный клапан 8 подпоршневой полости 58 реле давления 1, давление воздуха отсутствует. Поступающий в уравнительную полость 57 воздух перемещает уравнительный поршень 56 со штоком 5 вниз, который открывает питательный клапан 53, преодолевая сопротивление его пружины. Происходит наполнение воздухом тормозной магистрали 18 из питательной магистрали 15 через пневмолинии 16 и 17, питательную 50 и тормозную 51 полости реле давления 1, открытый питательный клапан 53, пневмолинию 19. Величина давления воздуха в тормозной магистрали 18 отслеживается датчиком давления 14. Алгоритмом, заложенным в микроконтроллер электронного блока 25 при зарядке, предусмотрено кратковременное завышение давления в тормозной магистрали 18 до зафиксированного в энергонезависимой памяти микроконтроллера значения сверхзарядного давления с последующим сбросом до зарядного. По мере наполнения уравнительной полости 57 микроконтроллер электронного блока 25 согласно заложенному в нем алгоритму изменяет длительность импульсов включения электропневматического впускного клапана 6, уменьшая их по приближению к величине сверхзарядного давления. По окончании наполнения тормозной магистрали 18 до сверхзарядного давления в результате уравнивания давления в связанной с ней через распределительный электропневматический клапан 8 подпоршневой полости 58 с давлением воздуха в уравнительной полости 57, уравнительный поршень 56 со штоком 55 под действием пружины питательного клапана 53 перемещается вверх, питательный клапан 53 садится на свое седло и перекрывает сообщение питательной магистрали 15 с тормозной магистралью 18. Далее микроконтроллер электронного блока 25 формирует импульсный сигнал на включение электропневматического выпускного клапана 7 реле давления 1, через который воздух малыми порциями стравливается из уравнительной полости 57 реле давления 1 в атмосферу до получения в ней давления, равного программно заданной величине зарядного давления, сохраненной в памяти микроконтроллера электронного блока 25. Из-за перепада давлений уравнительный поршень 56 со штоком 55 перемешается вверх, преодолевая сопротивление пружины атмосферного клапана 54, и открывает его, выпуская воздух из тормозной магистрали 18 через пневмолинию 19, тормозную 51, атмосферную 52 полости и открытый атмосферный клапан 54 реле давления 1 в атмосферу. Импульсное включение быстродействующего электропневматического выпускного клапана 7 обеспечивает необходимую величину проходного сечения атмосферного клапана 54 при его открытии для достижения определенного темпа ликвидации сверхзарядного давления тормозной магистрали 18.
Поддержание давления в уравнительном резервуаре 3, равного давлению в тормозной магистрали 18, обеспечивается уравнительными впускным 10 и выпускным 11 электропневматическими клапанами в режиме реального времени в зависимости от выполняемого процесса в тормозной магистрали 18. Клапаны 10 и 11 приводятся в действие импульсными сигналами от электронного блока 25, который управляет ими с помощью микроконтроллера с заложенной в нем программой, сравнивая величину давления в тормозной магистрали 18 по датчику давления 14 с показаниями датчика давления 12 на уравнительном резервуаре 3. Для увеличения давления в уравнительном резервуаре 3 микроконтроллер электронного блока 25 формирует сигнал на открытие впускного электропневматического клапана 10; для уменьшения давления в уравнительном резервуаре 3 - сигнал на открытие электропневматического выпускного клапана 11 до момента достижения в уравнительном резервуаре 3 давления, равного давлению в тормозной магистрали 18.
Параллельно осуществляется подача воздуха из питательной магистрали 15 через пневмолинии 16 и 38, открытый воздействием поворотной рукояткой 35 и соответствующего командного кулачка 40 пневмораспределитель 32 через сигнальную пневмолинию 42 на включение коммутирующего пневматического клапана 71 редуктора 70, пневматического клапана обратной связи 72 и коммутирующего пневматического клапана 74 стабилизатора 73. Тем самым происходит подключение к питательной магистрали 15 и к уравнительному резервуару 3 редуктора 70 зарядного давления, а стабилизатора 73 - к уравнительному резервуару 3.
Далее кран машиниста переходит в режим автоматического поддержания в тормозной магистрали 18 зарядного давления. Микроконтроллер электронного блока 25 сравнивает показания датчика давления 14 с введенным в его памяти значением зарядного давления и, в случае падения давления в тормозной магистрали 18 из-за утечек через неплотности соединений, формирует сигнал на импульсное включение электропневматического впускного клапана 6. Сжатый воздух, поступающий в уравнительную полость 57 реле давления 1, воздействует на уравнительный поршень 56 со штоком 55, который приоткрывает питательный клапан 53, в результате чего происходит подпитка тормозной магистрали 18 из питательной магистрали 15 до заданного зарядного давления. После установления в тормозной магистрали 18 давления, равного заложенному в памяти микроконтроллера, впускной клапан 6 закрывается.
При завышении давления в уравнительном резервуаре 3 в результате термодинамического эффекта электронный блок 25 по показанию датчика давления 12 обеспечивает подачу напряжения на уравнительный выпускной клапан 11 для сообщения уравнительного резервуара 3 с атмосферой и установления в нем величины давления в соответствии с заданной величиной.
Для автоматического выполнения ступеней торможения согласно программно заданным величинам поворотная рукоятка 35 модуля управления 20 переводится в положение «Служебное торможение» и без задержки устанавливается в положение «Перекрыша с питанием». Электронный датчик положений 27 определяет обе позиции поворотной рукоятки 35 и передает соответствующий сигнал с помощью электронной платы управления по CAN-интерфейсу в электронный блок 25. Микроконтроллер электронного блока 25 формирует импульсный сигнал на включение электропневматического выпускного клапана 7, через который сжатый воздух из уравнительной полости 57 реле давления 1 выходит в атмосферу. В результате перепада давлений уравнительный поршень 56 со штоком 55 совершает поступательное движение вверх, открывая атмосферный клапан 54 на величину проходного сечения, обеспечивающего выпуск воздуха в атмосферу определенным темпом разрядки тормозной магистрали до значения, программно заложенного в микроконтроллере электронного блока 25. При достижении в тормозной магистрали 18 требуемого давления, отслеживаемого датчиком давления 14, микроконтроллер электронного блока 25 отключает электропневматический выпускной клапан 7, прекращая выпуск воздуха из уравнительной полости 57 в атмосферу. По мере уравнивания давления в тормозной магистрали 18 и в связанной с нею подпоршневой полости 58 с давлением воздуха в уравнительной полости 57 уравнительный поршень 56 со штоком 55 под действием пружины атмосферного клапана 54 перемещается вниз, атмосферный клапан 54 садится на свое седло и перекрывает сообщение тормозной магистрали 18 с атмосферой.
После этого кран машиниста переходит в режим автоматического поддержания в тормозной магистрали 18 установившегося давления, иными словами автоматически устанавливается «Перекрыша с питанием».
В том случае, если необходимо иметь режим «Перекрыша без питания», после получения соответствующего сигнала от модуля управления 20 при постановке поворотной рукоятки 35 в это положение микроконтроллер электронного блока 25 формирует сигнал на включение распределительного электропневматического клапана 8, который связывает уравнительную полость 57 реле давления 1 с подпоршневой полостью 58. Уравнительный поршень 56 устанавливается в среднее плавающее положение ввиду равенства давлений в обеих полостях 57 и 58 и не воздействует на питательный 53 и атмосферный 54 клапаны реле давления 1. В результате подпитки тормозной магистрали 18 из питательной магистрали 15 не происходит.
Для осуществления процесса зарядки тормозной магистрали 18 сверхзарядным давлением, программно заданным в микроконтроллере электронного блока 25, поворотная рукоятка 35 модуля управления 20 переводится в положение «Отпуск и зарядка» и удерживается в этом положении. Сигнал с датчика положений 27 модуля управления 20 подается на электронный блок 25, который, в свою очередь, формирует электрический сигнал постоянной величины на открытие электропневматического впускного клапана 6 реле давления 1, и сжатый воздух поступает в уравнительную полость 57, открывая посредством уравнительного поршня 56 со штоком 55 питательный клапан 53 на максимальную величину проходного сечения. При достижении в тормозной магистрали 18 давления воздуха, отслеживаемого датчиком давления 14, равного программно заданной величине сверхзарядного давления, электропневматический впускной клапан 6 отключается. Процесс ликвидации сверхзарядки осуществляется переводом поворотной рукоятки 35 модуля управления 20 в положение «Поездное». Микроконтроллер электронного блока 25 после получения сигнала с модуля управления 20, измерив датчиком давления 14 величину установившегося сверхзарядного давления в тормозной магистрали 18, согласно введенному времени ликвидации формирует импульсные сигналы на попеременное включение электропневматических впускного 6 и выпускного 7 клапанов реле давления 1, тем самым осуществляя определенный темп снижения давления в уравнительной полости 57. Поступательным движением уравнительного поршня 56 со штоком 55 при этом приоткрывается атмосферный клапан 54, обеспечивая выпуск воздуха малыми порциями из тормозной магистрали 18 в атмосферу, обеспечивая необходимый темп ликвидации сверхзарядного давления.
Выполнение экстренного торможения производится постановкой поворотной рукоятки 35 модуля управления в положение «Экстренное торможение». При получении соответствующего сигнала с модуля управления 20 микроконтроллер электронного блока 25 формирует электрический сигнал постоянной величины на включение электропневматического выпускного клапана 7 реле давления 1, через который осуществляется выпуск воздуха из уравнительной полости 57.
Одновременно в модуле управления 20 при перемещении поворотной рукоятки 35 соответствующий командный кулачок 40 положения «Экстренное торможение» нажимает на роликовый толкатель 39 пневмораспределителя 34, переключая его в открытое состояние. Сжатый воздух из питательной магистрали 15 по пневмолиниям 16 и 38 и открытый пневмораспределитель 34 поступает по пневмолиниям 44, 61 на установленный на реле давления 1 аварийный пневматический выпускной клапан 60, переводя его в открытое состояние. В уравнительной полости 57 резко падает давление воздуха ввиду большого проходного сечения аварийного клапана 60, и атмосферный клапан 54 посредством уравнительного поршня 56 со штоком 55 открывается на максимальную величину его проходного сечения. Сжатый воздух с большой скоростью выпускается из тормозной магистрали 18 по пневмолинии 19, через тормозную 51 и атмосферную 52 полости реле давления 1 в атмосферу.
Экстренное торможение осуществляется также клапаном аварийного экстренного торможения 22. В любом положении поворотной рукоятки 35 модуля управления 20 в случае возникновения нештатной ситуации производится нажатие на фигурный шток 46 с кнопкой, переводя пневматический клапан 22 с большим проходным сечением в открытое состояние. Сжатый воздух с большой скоростью через пневмолинию 47 выходит из тормозной магистрали 18 в атмосферу. Одновременно фигурный шток 46 воздействует на роликовый толкатель электрического выключателя 48 и на роликовый рычаг спускного пневматического клапана 45. В результате воздействия на роликовый толкатель электрического выключателя 48 происходит переключение его контактов, при этом обесточивается модуль управления 20, включается песочница локомотива.
При нажатии на фигурный шток 46 открывается отпускной пневматический клапан 45 воздействием на его роликовый рычаг, который выпускает воздух из сигнальной пневмолинии 42 в атмосферу. При этом выключаются коммутирующие пневматические клапаны 71 и 74, а также пневматический клапан 72 обратной связи по давлению, отключая от уравнительного резервуара 3 редуктор зарядного давления 70 и стабилизатор 73, тем самым прекращая подпитку уравнительного резервуара 3 в случае нахождения поворотной рукоятки 35 в положении "Поездное" при резервном пневматическом управлении.
Для обеспечения автоматического перехода на резервное пневматическое управление при выполнении режимов работы «Поездное», «Служебное торможение», «Экстренное торможение» одновременно с подачей модулем управления 20 электронных сигналов, обрабатываемых электронным блоком 25, осуществляется подача пневматических сигналов по сигнальным пневмолиниям 42, 43, 44 на блок клапанов пневматического резерва 4 благодаря полностью совпадающим управляющим позициям электронной и пневматической частей модуля управления 20. Поворотная рукоятка 35 задает режим управления одновременно и для электронной части, и для пневматической части модуля управления 20 в положениях "Поездное", "Перекрыша с питанием", "Служебное торможение" и "Экстренное торможение".
В зависимости от положения поворотной рукоятки 35 пневмораспределители 32, 33, 34 либо остаются в бездействии, либо под воздействием соответствующего командного кулачка 40 срабатывает один из них, обеспечивая подачу сжатого воздуха из питательной магистрали 15 по пневмолиниям 16 и 38 и соответствующие сигнальные пневмолинии 42, 43 или 44 к блоку клапанов пневматического резерва 4 исполнительной части, связанному с уравнительным резервуаром 3. Благодаря подаче сжатого воздуха по сигнальным пневмолиниям 42, 43 или 44 происходит переключение в открытое состояние коммутирующих клапанов 71 и 74, пневматического клапана обратной связи 72, пневматических клапанов "Служебное торможение" 75 и "Экстренное торможение" 76.
Для обеспечения непрерывности процессов, происходящих в тормозной магистрали 18 при торможении или отпуске, при автоматическом переходе с электронного управления на резервное пневматическое управление требуется поддержание равного давления в тормозной магистрали 18 и уравнительном резервуаре 3, который при пневматическом управлении управляет работой реле давления 1. При электронном управлении поддержание давления в уравнительном резервуаре 3, равного давлению в тормозной магистрали, осуществляется или поступлением воздуха через открытый впускной уравнительный клапан 10 из питательной магистрали 15 по пневмолиниям 16 и 59, или выпуском воздуха через выпускной уравнительный клапан 11 в атмосферу. Управление клапанами 10 и 11 осуществляет электронный блок 25 подачей на них импульсных сигналов по показаниям датчиков давления 12 и 14.
Связь реле давления 1 с блоком клапанов пневматического резерва 4 и уравнительным резервуаром 3 осуществляет отсечной пневматический клапан 63, которым управляет электропневматический клапан 9. При подаче напряжения от электронного блока 25 управляющий электропневматический клапан 9 переключается в рабочее положение, при котором пневмолиния 66 соединяется с атмосферой, и отсечной пневматический клапан 63 остается в исходном закрытом состоянии, разрывая сообщение устройства резервного пневматического управления 2 и уравнительную полость 57 реле давления 1. При отключении электропитания в аварийной ситуации управляющий электропневматический клапан 9 обесточивается и возвращается в исходное положение, осуществляя подачу сжатого воздуха от питательной магистрали 15 по пневмолиниям 16, 59 и 66 на отсечной пневматический клапан 63. Отсечной пневматический клапан 63, переключаясь в рабочее положение, осуществляет подсоединение устройства управления пневматического резерва 2 к уравнительной полости 57 реле давления 1. При этом на момент отключения электронного блока 25 независимо от процессов в тормозной магистрали 18 обеспечено равенство давлений в ней и уравнительном резервуаре 3 работой уравнительных впускного 10 и выпускного 11 клапанов. Таким образом, осуществляется автоматический переход крана машиниста с электронного на резервное пневматическое управление без нарушения выполнения краном машиниста тормозных процессов.
При резервном пневматическом управлении при установке поворотной рукоятки 35 в положение «Поездное», установленный на валу 41 соответствующий командный кулачок 40 положения «Поездное» модуля управления 20, воздействует на роликовый толкатель 39 пневмораспределителя 32, переключая его в открытое состояние, и сжатый воздух в виде пневматического сигнала поступает из питательной магистрали 15 через пневмолинии 16 и 38, открытый пневмораспределитель 32, сигнальную пневмолинию 42 на коммутирующий пневматический клапан 71 редуктора 70, пневматический клапан 72 обратной связи по давлению, коммутирующий пневматический клапан 74 стабилизатора 73 блока клапанов пневматического резерва 4, переводя их в открытое состояние. При этом из питательной магистрали 15 сжатый воздух поступает через редуктор зарядного давления 70 на уравнительный резервуар 3 и стабилизатор 73. Давление воздуха в уравнительном резервуаре 3 воздействует через отсечной клапан 63 переключающего устройства 5 на реле давления 1, которое, в свою очередь, осуществляет наполнение тормозной магистрали 18.
В случае пропадания напряжения или выхода из строя электронного управления в момент сверхзарядки и автоматическом переходе на резервное пневматическое управления стабилизатор 73 устройства резервного пневматического управления 2 осуществляет выпуск сжатого воздуха из уравнительного резервуара 3 в атмосферу определенным темпом, тем самым обеспечивая ликвидацию сверхзарядки тормозной магистрали 18 посредством реле давления 1. Таким образом, поддерживается постоянная готовность устройства резервного пневматического управления 2 включиться в работу в любой момент времени в случае отключения питания или выхода из строя электронного управления.
Для осуществления торможения при резервном пневматическом управлении поворотную рукоятку 35 модуля управления 20 переводят в положение «Служебное торможение». При этом соответствующий командный кулачок 40 положения "Поездное" прекращает воздействие на роликовый толкатель пневмораспределителя 32, который переходит в исходное состояние. Воздух из сигнальной пневмолинии 42 через пневмораспределитель 32 выходит в атмосферу, а коммутирующие клапаны 71 и 74, а также клапан обратной связи 72 закрываются, прекращая подпитку уравнительного резервуара 3 из питательной магистрали 15. Соответствующий положению "Служебное торможение" командный кулачок 40 воздействует на роликовый толкатель 39 пневмораспределителя 33 положения «Служебное торможение», переключая его в открытое состояние. Сжатый воздух в виде пневматического сигнала поступает из питательной магистрали 15 через пневмолинии 16 и 38, открытый пневмораспределитель 33, сигнальную пневмолинию 43 на клапан 75 служебного торможения с дроссельным отверстием, переключает его в открытое состояние. В результате происходит разрядка уравнительного резервуара 3 в атмосферу темпом служебного торможения, определяемого сечением дроссельного отверстия. Реле давления 1, связанное с уравнительным резервуаром 3 через отсечной клапан 63 переключающего устройства 5, также осуществляет выпуск воздуха из тормозной магистрали 18 тем же темпом. При этом давление воздуха в тормозной магистрали 18 при резервном пневматическом управлении отслеживается машинистом по установленному на уравнительном резервуаре 3 манометру 77.
Для прекращения разрядки тормозной магистрали 18 при резервном пневматическом управлении поворотную рукоятку 35 модуля управления 20 переводят в положение «Перекрыша с питанием». При этом командные кулачки 40 не воздействуют на толкатели 39 пневмораспределителей 32, 33 и 34.
В уравнительной полости 57 реле давления 1 устанавливается давление, равное давлению в уравнительном резервуаре 3 после ступени торможения. Так как плотность тормозной магистрали 18 поезда из-за утечек воздуха ниже, чем плотность уравнительного резервуара 3, то на поршне 56 растет перепад давлений. Давление в уравнительной полости 57, сообщаемой с уравнительным резервуаром 3, снижается медленнее давления в подпоршневой полости 58, сообщаемой через выключенный распределительный клапан 8 реле давления 1 с тормозной магистралью 18. Когда усилия, создаваемого перепадом давлений, становится достаточно для преодоления сопротивления пружины питательного клапана 53, уравнительный поршень 56 со штоком 55 перемещаются вниз и открывают питательный клапан 53. Происходит подпитка воздухом тормозной магистрали 18 из питательной магистрали 15. Поддержание давления в тормозной магистрали 18 осуществляется благодаря плотности уравнительного резервуара 3.
Для выполнения экстренного торможения при резервном пневматическом управлении поворотную рукоятку 35 модуля управления 20 переводят в положение «Экстренное торможение». Соответствующий этому положению командный кулачок 40, воздействуя на толкатель 39 пневмораспределителя 34 положения «Экстренное торможение», переключает его в открытое состояние. Сжатый воздух в виде пневматического сигнала поступает из питательной магистрали 15 через пневмолинии 16 и 38, открытый пневмораспределитель 34, сигнальную пневмолинию 44 на пневматический клапан 76 положения «Экстренное торможение» с дроссельным отверстием. В результате, клапан 76 переключается в открытое состояние и соединяет уравнительный резервуар 3 с атмосферой. Происходит разрядка уравнительного резервуара 3 темпом экстренного торможения, определяемого сечением дроссельного отверстия.
Одновременно подача пневматического сигнала осуществляется на аварийный пневматический выпускной клапан 60 реле давления 1 через сигнальные пневмолинии 44 и 61, переводя его в открытое состояние. В уравнительной полости 57 резко падает давление воздуха ввиду большого проходного сечения аварийного клапана 60. Из-за резкого перепада давлений между уравнительной 57 и подпоршневой 58 полостями уравнительный поршень 56 со штоком 55 совершает быстрое движение вверх, открывая атмосферный клапан 54 на максимальную величину его проходного сечения. Сжатый воздух с большой скоростью выпускается в атмосферу из тормозной магистрали 18.
Такое выполнение предлагаемого крана машиниста управления тормозами железнодорожного транспортного средства обеспечивает автоматический переход на резервное пневматическое управление в случае отключения питания электронного управления или выхода его из строя без нарушения выполнения краном машиниста тормозных процессов, в результате чего не требуется время для реакции машиниста при переходе на резервное управление в аварийной ситуации, тем самым достигается безопасность движения поезда.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран машиниста железнодорожного транспортного средства | 2016 |
|
RU2635732C1 |
| КРАН МАШИНИСТА ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2444454C1 |
| КРАН МАШИНИСТА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2329167C1 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗОМ ПОДВИЖНОГО СОСТАВА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2614468C2 |
| Кран машиниста с дистанционным управлением автоматическим пневматическим тормозом | 2023 |
|
RU2814304C1 |
| Кран машиниста железнодорожного транспортного средства | 1986 |
|
SU1382700A1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДА | 2011 |
|
RU2478053C2 |
| КРАН МАШИНИСТА ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2049005C1 |
| Кран машиниста с дистанционным управлением Чекина | 1987 |
|
SU1511165A2 |
| Система тормозного управления железнодорожного транспортного средства | 1987 |
|
SU1428633A1 |

Изобретение относится к области рельсового транспорта, в частности к кранам машиниста тормоза железнодорожного транспортного средства. Кран машиниста содержит реле давления, устройство резервного пневматического управления, переключающее устройство, а также модуль управления с поворотной рукояткой и электронный блок. Реле давления имеет уравнительную, тормозную и питательную полости, питательный и атмосферный клапаны, при этом уравнительная полость связана по крайней мере с одним впускным и по крайней мере одним выпускным электропневматическими клапанами и датчиком давления. Модуль управления включает в себя электронную и пневматические части, при этом поворотная рукоятка выполнена с возможностью задания для электронной и пневматической частей одинаковых режимов работы крана машиниста. Устройство резервного пневматического управления состоит из уравнительного резервуара с присоединенными к нему уравнительными электропневматическими клапанами и датчиком давления и пневматически связанного с уравнительным резервуаром блока клапанов пневматического резерва. Устройство резервного пневматического управления связано через переключающее устройство с уравнительной полостью реле давления. При этом переключающее устройство выполнено в виде отсечного пневматического клапана, управляемого по крайней мере одним электропневматическим клапаном и выполненного с возможностью соединения уравнительной полости реле давления и устройства резервного пневматического управления при пропадании напряжения. Тем самым достигается автоматический переход на резервное пневматическое управление при выходе из строя электронного управления без нарушения протекания тормозных процессов в тормозной магистрали поезда, в результате повышается безопасность движения поезда, облегчается и упрощается процесс управления краном машиниста. 11 з.п. ф-лы, 2 ил.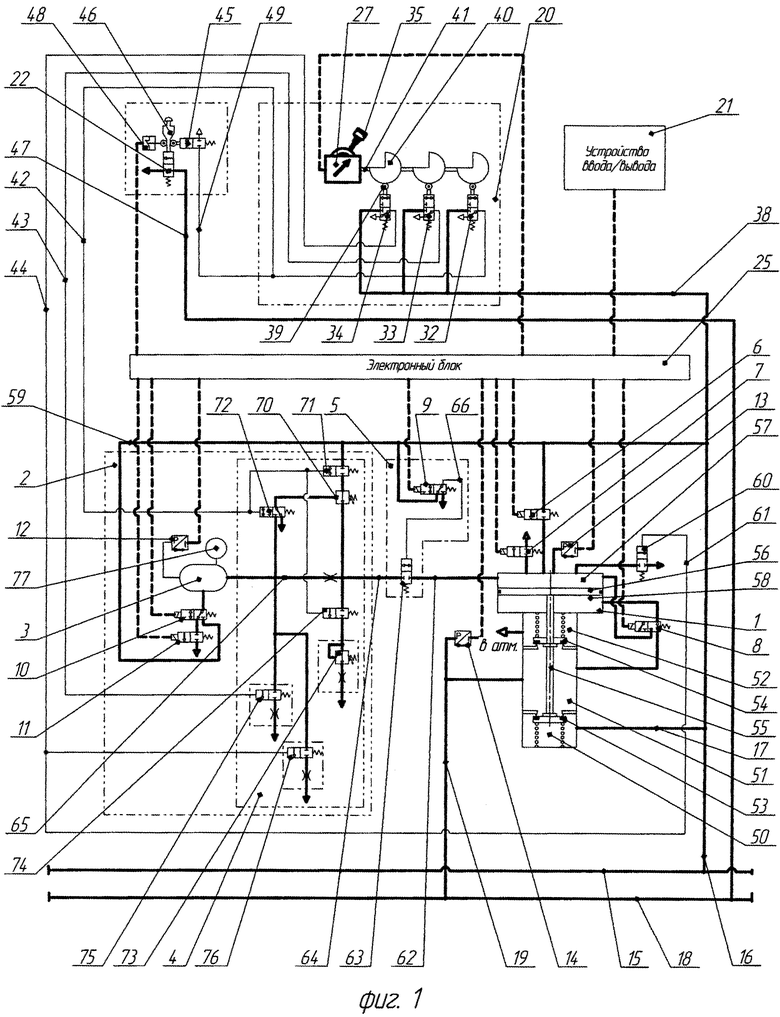
1. Кран машиниста тормоза железнодорожного транспортного средства, содержащий реле давления, имеющее уравнительную полость, питательную полость, связанную с питательной магистралью, тормозную полость, связанную с тормозной магистралью, питательный клапан, связывающий в открытом состоянии питательную и тормозную полости, атмосферный клапан, связывающий в открытом состоянии тормозную полость с атмосферой; электропневматические клапаны, датчики давления, установленные на уравнительной полости реле давления, пневмолинии связи реле давления с тормозной магистралью и на уравнительном резервуаре; устройство резервного пневматического управления, переключающее устройство, а также модуль управления с поворотной рукояткой и электронный блок, имеющий микроконтроллер с заложенными в нем программами, составленными на основе алгоритмов срабатывания крана машиниста при требуемых режимах отпуска и ступенях торможения, установления сверхзарядного давления с последующей его ликвидацией до зарядного, с непрерывной индикацией величин давления в уравнительной полости реле давления, тормозной магистрали и уравнительном резервуаре, при этом электронный блок связан с датчиками давления и с электропневматическими клапанами, отличающийся тем, что модуль управления включает в себя электронную часть, выполненную с возможностью выработки электронных сигналов в зависимости от положения поворотной рукоятки с последующей их передачей по CAN-интерфейсу на электронный блок, и пневматическую часть, выполненную с возможностью выработки управляющих пневмосигналов в зависимости от положения поворотной рукоятки с последующей подачей их с помощью сигнальных пневмолиний на устройство резервного пневматического управления, при этом поворотная рукоятка выполнена с возможностью задания для электронной и пневматической частей одинаковых режимов работы крана машиниста; уравнительная полость реле давления связана по крайней мере с одним впускным и по крайней мере с одним выпускным электропневматическими клапанами, выполненными с возможностью управления ими электронным блоком для установления в уравнительной полости давления заданной величины с последующим получением аналогичного давления в тормозной магистрали посредством реле давления; устройство резервного пневматического управления состоит из уравнительного резервуара и связанного с ним пневмолинией блока клапанов пневматического резерва, содержащего редуктор зарядного давления, стабилизатор, коммутирующие пневматические клапаны, клапан обратной связи, клапаны служебного и экстренного торможения, при этом уравнительный резервуар связан с впускным и выпускным уравнительными электропневматическими клапанами, выполненными с возможностью управления ими электронным блоком для установления в уравнительном резервуаре давления, равного давлению в тормозной магистрали; а устройство резервного пневматического управления связано через переключающее устройство с уравнительной полостью реле давления, при этом переключающее устройство выполнено в виде отсечного пневматического клапана, связанного по крайней мере с одним управляющим электропневматическим клапаном и выполненного с возможностью разобщения уравнительной полости реле давления и устройства резервного пневматического управления при подаче напряжения на управляющий электропневматический клапан и их соединения при пропадании напряжения.
2. Кран машиниста по п. 1, отличающийся тем, что содержит клапан аварийного экстренного торможения, снабженный спускным пневматическим клапаном, выполненным с возможностью выпуска воздуха в атмосферу из сигнальной пневмолинии положения «Поездное» поворотной рукоятки модуля управления.
3. Кран машиниста по п. 1, отличающийся тем, что электронная часть модуля управления состоит из датчика положений поворотной рукоятки управления режимов работы крана машиниста, имеющего механическую связь через вал с поворотной рукояткой, и электронной платы, имеющей микроконтроллер с заложенной в нем программой определения положений поворотной рукоятки по сигналу от датчика положений в позициях отпуска и торможения и связанной посредством CAN-интерфейса с электронным блоком.
4. Кран машиниста по п. 1, отличающийся тем, что пневматическая часть модуля управления включает в себя набор управляющих пневмораспределителей, выполненных с возможностью воздействия на них командных кулачков, жестко связанных через вал с поворотной рукояткой.
5. Кран машиниста по п. 1, отличающийся тем, что на уравнительном резервуаре установлен по крайней мере один манометр.
6. Кран машиниста по п. 1, отличающийся тем, что впускной и выпускной электропневматические клапаны уравнительного резервуара выполнены с возможностью управления ими электронным блоком с помощью импульсных электросигналов.
7. Кран машиниста по п. 1, отличающийся тем, что выпускной и впускной электропневматические клапаны реле давления выполнены с возможностью управления ими электронным блоком с помощью импульсных электросигналов.
8. Кран машиниста по п. 1, отличающийся тем, что питательный и атмосферный клапаны реле давления имеют проходное сечение, равное диаметру трубопровода тормозной магистрали.
9. Кран машиниста по п. 1, отличающийся тем, что под уравнительным поршнем реле давления выполнена подпоршневая полость, при этом реле давления содержит распределительный электропневматический клапан, который установлен с возможностью обеспечения пневматической связи подпоршневой полости реле давления с тормозной полостью в выключенном состоянии, с уравнительной полостью - во включенном состоянии, и выполненный с возможностью управления им электронным блоком.
10. Кран машиниста по п. 1, отличающийся тем, что уравнительная полость реле давления снабжена аварийным пневматическим выпускным клапаном с увеличенным проходным сечением.
11. Кран машиниста по п. 1, отличающийся тем, что пневматические клапаны служебного и экстренного торможения снабжены дроссельными отверстиями с возможностью обеспечения темпов выпуска воздуха при служебном и экстренном торможении.
12. Кран машиниста по п. 1, отличающийся тем, что электронный блок связан посредством CAN-интерфейса с устройством ввода/вывода данных, выполненным в виде информационного дисплея с задающими параметры кнопками.
| КРАН МАШИНИСТА ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2444454C1 |
| Кран машиниста тормоза железнодорожного транспортного средства | 1982 |
|
SU1110689A1 |
| Устройство блокировки тормозов локомотива | 1989 |
|
SU1689163A1 |
| Р.В | |||
| Асадченко, "АВТОМАТИЧЕСКИЕ ТОРМОЗА ПОДВИЖНОГО СОСТАВА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА", М., 2002, стр | |||
| Железобетонный фасонный камень для кладки стен | 1920 |
|
SU45A1 |
| Устройство управления пневматической тормозной системой железнодорожного транспортного средства | 1983 |
|
SU1189710A1 |
| Кран машиниста железнодорожного транспортного средства | 1986 |
|
SU1382700A1 |

