Изобретение предназначено для использования на железнодорожном транспорте и относится к системам автоматики и телемеханики для управления вагонными замедлителями на сортировочных горках, предотвращающим выжимания колес вагона из балочного вагонного замедлителя.
Известно устройство для автоматического торможения подвижного состава при сходе вагона с рельсов (патент RU №2284928 от 30.03.2005), содержащее датчики вертикальных колебательных ускорений, фильтры низкой частоты, аналого-цифровые преобразователи, средства оценки временного информационного поля ускорений, компараторы, источники опорного "фонового" поля ускорений и формирователь управляющего сигнала для блока автоматического включения тормозной системы локомотива, выполненное в виде n-ряда независимых блоков, устанавливаемых в зонах отслеживания вертикальных колебательных ускорений на ходовых тележках вагонов, снабженное индивидуальными средством оценки временного информационного поля вертикальных колебательных ускорений, компаратором, источником опорного "фонового" поля ускорений и формирователем управляющего сигнала, реализующее способ автоматического торможения подвижного состава при сходе вагона с рельсов, при котором в непрерывном режиме отслеживают исходные импульсы колебательных ускорений в виде непрерывных электрических сигналов, преобразуют их в низкочастотные дискретные сигналы с заданным шагом квантования, проводят оценку временного информационного поля ускорений и сравнение его с опорным "фоновым" полем ускорений и по превалированию временного информационного поля над "фоновым" идентифицируют сход и формируют управляющий сигнал для включения тормозной системы состава, при этом за исходные принимают импульсы вертикальных колебательных ускорений, отслеживаемых в зонах наибольшего возбуждения колебаний на ходовых тележках вагонов, по меньшей мере в одной зоне, идентификацию схода и формирование управляющего сигнала осуществляют в автономном для каждой из этих зон едином замкнутом цикле и в качестве временного информационного поля ускорений оценивают дисперсию спектра отслеживаемых вертикальных колебательных ускорений, а управляющий сигнал формируют в виде сигналов дистанционной связи, например, радиосигналов на частоте приема штатной радиосвязи локомотива.
Недостаток устройства - в отсутствии возможности идентификации начала процесса схода вагона с рельсов и, как следствие, невозможность предотвращения аварии; недостаток способа - в сложности практической реализации на сортировочных горках с высокой загруженностью ввиду необходимости быстрой фильтрации широкого спектра шумов, создаваемых вагонами на соседних колеях, выделения полезного сигнала и своевременной (до факта схода) реакции со стороны системы управления вагонного замедлителя.
Известен способ идентификации схода вагона подвижного состава с рельсов (патент RU №2209740 от 20.04.2000), при котором механические колебания, создаваемые контактом колес с рельсами при движении вагона подвижного состава в диапазоне акустических волн, представляют как сигнал в диапазоне акустических частот; вводятся критерии в виде норм временных параметров колебаний указанного сигнала случайного процесса в двух каналах в двоично-цифровом коде, количества колебаний, допустимых временных сдвигов между сигналами случайного процесса по каналам и повторений случайного процесса в канале; регистрируют координаты временных значений сигнала в моменты изменения знака первой производной, описывающей указанный сигнал функции; определяют интервалы времени между указанными моментами и сравнивают их текущие значения временного интервала с заданной нормой; если текущее значение временного интервала находится в пределах заданного, а количество повторений результатов по каналам за установленный интервал времени не менее заданного, идентифицируют факт схода вагона подвижного состава.
Недостаток способа - в сложности практической реализации на сортировочных горках с высокой загруженностью ввиду необходимости быстрой фильтрации широкого спектра шумов, создаваемых вагонами на соседних колеях, выделения полезного сигнала и своевременной (до факта схода) реакции со стороны системы управления вагонного замедлителя; способ не дает численной оценки величины отдаления поверхности катания колеса вагона от поверхности катания рельса, не позволяя системе управления вагонным замедлителем адекватное управляющее воздействие для предотвращения схода вагона с рельсов.
Известен способ контроля контакта рельса с колесом (патент RU №2596048 от 25.04.2012), включающий этапы: записи вертикального и/или бокового ускорения по меньшей мере одного колеса вагона; сохранения записанного ускорения вместе с ассоциированным угловым и с ассоциированным географическим положением колеса; идентификации событий ускорения, превышающих предопределенный параметр; классифицирования каждого события с использованием вычислительной физической модели колеса; выполнения частотного анализа событий, ассоциированных с данными угловыми положениями и/или с данными географическими положениями колеса, и, если частота по меньшей мере одного данного события в одном ассоциированном угловом и/или ассоциированном географическом положении превышает предопределенный порог, то колесо и/или рельсовый путь в данном географическом положении подвергаются проверке.
Недостаток способа - высокая стоимость реализации ввиду необходимости оснащения колес вагонов датчиками для измерения ускорения колеса и углового положения. Способ не предназначен для определения начала схода колес с рельсов на сортировочных горках.
Известно устройство обнаружения колес железнодорожного вагона (патент US №4200856 от 01.06.1978), использующее пару накладных сенсорных блоков, которые разнесены на заданное расстояние, расположены на верхней поверхности основания рельсового пути и включающие удлиненный элемент панели из эпоксидной композиции, имеющий уменьшенный промежуточный участок, к которому прикреплен элемент тензодатчика, формирующего сигнал в зависимости от степени нагружения участка рельсов, где он закреплен.
Недостаток данного устройства - невозможность использования для определения избыточной силы, развиваемой вагонным замедлителем, и идентификации начала формирования зазора между поверхностью катания колеса вагона и поверхностью катания рельса по причине отсутствия датчиков, определяющих величину зазора.
Известно устройство для установки датчиков или средств переключения в рельсовых системах (патент ЕР №1808531 от 14.12.2005) с корпусом, в котором размещаются датчики или средства переключения, крепящиеся с помощью кронштейна в области рельса с возможностью вывода, по меньшей мере, на один соединительный кабель датчиков или средств переключения.
Известно устройство управления прицельным торможением (патент на полезную модель RU №99417 от 21.04.2010), содержащее напольное оборудование сортировочной горки с устройством для поосного взвешивания вагонов на горбе горки, метеостанцию и управляющий вычислительный комплекс, состоящий из программно-аппаратных модулей в составе блока формирования параметров отцепов, модуля ввода и обработки сигналов датчиков счета осей, модуля ввода и обработки от радиолокационных индикаторов скорости, модуля реализации расчетной скорости, каждый из которых связан с напольным оборудованием и модулем ввода и обработки сигналов датчиков счета осей, отличающееся тем, что оно содержит модуль автоматизированного управления скоростью надвига, связанный с напольным оборудованием и с модулем расчета скорости выхода отцепа из тормозных позиций и предназначенный для поддержания максимально допустимой скорости роспуска, обеспечивающей безопасное скатывание отцепов по заданным маршрутам с допустимыми интервалами и скоростями соударения в режиме реального времени, и модуль расчета скорости отцепов по датчикам счета осей, связанный с модулем ввода и обработки сигналов датчиков счета осей и с модулем расчета скорости выхода отцепа из тормозных позиций и позволяющий использовать в расчетах фактическую скорость скатывания отцепов на участках между тормозными позициями.
Недостатком данного устройства является отсутствие датчиков для идентификации формирования зазора между поверхностью катания колеса вагона и поверхностью катания рельсов, определяющих величину зазора.
Далее в описании использованы следующие сокращения:
БК - блок коммутации;
ВЗ - вагонный замедлитель;
ГП - горочный пост;
Д - датчик давления;
ДНР - датчик напряжений, установленный на рельсе;
ДПК - датчик положения поверхности катания колеса относительно поверхности катания рельса;
ПП - пневматический привод;
ПРД - пневматический регулятор давления;
ПЦ - пневмоцилиндр;
РПК - растормаживающий прямоточный клапан;
РД - регулятор давления;
ТПК - тормозной прямоточный клапан;
ШИМ - широтно-импульсная модуляция;
ЭМ - электромагнит;
ЭБУ - электронный блок управления;
ЭП БУК - электропневматический блок управления.
Известно устройство и способ управления балочным вагонным замедлителем (патент RU №2711405 от 11.09.2017), имеющее сенсоры контакта колес, подключенные к устройству обработки сигналов для идентификации выжимания колеса, заторможенного в балочном вагонном замедлителе рельсового транспортного средства, и электронный блок управления для реализации способа управления вагонным замедлителем при идентификации выжимания, заключающегося в подаче сигнала на уменьшение тормозного нажатия балочного вагонного замедлителя.
Недостаток данного изобретения в том, что в нем не раскрыта структура блока управления тормозным нажатием балочного вагонного замедлителя. Недостаток способа управления - отсутствие алгоритма реализации способа управления, что не позволяет использовать данное изобретение в инженерной практике.
Известна система управления пневматическим приводом вагонного замедлителя (патент RU №2750559 от 11.11.2020, прототип), имеющая пневматический регулятор давления воздуха; ЭП БУК пневматического регулятора давления воздуха; БК с блоком гальванических развязок и грозозащиты; ЭБУ, входы которого соединены через БК с выходами управления от ГП, состоящий из контроллера, энергонезависимой памяти и соединенного с контроллером модуля дискретных сигналов (МДС) пульт оператора с интерфейсом; блок диагностики, соединенный с БК, контроллером, энергонезависимой памятью, модулем дискретных сигналов; аварийный блок управления, подсоединенный к блоку коммутации, контроллеру и пульту оператора.
Недостаток данной системы - отсутствие элементов системы, реагирующих на выжимание колес вагона из балочного ВЗ.
Известен способ управления пневматическим приводом балочного вагонного замедлителя (патент RU №2750559 от 11.11.2020), реализуемый с помощью описанной выше системы, включающий получение электронным блоком данных от горочного поста информации о заданной ступени давления в пневмоцилиндрах (ПЦ) пневматического привода вагонного замедлителя (ПП ВЗ) и интервала времени на достижение заданного максимального для данного интервала давления; получение электронным блоком управления сигналов от первого, второго и третьего датчиков давления; подачу управляющего сигнала от модуля дискретных сигналов электронного блока управления на первый ЭМ управления регулятора давления электропневматического блока управления клапанами для включения регулятора давления и отсчет времени от момента подачи сигнала на первый ЭМ управления регулятора давления, открытие тормозного прямоточного клапана; контроль уровня давления в управляющей полости тормозного прямоточного клапана, регистрируемого первым датчиком давления, и регистрацию времени достижения в ПЦ максимального давления ступени, заданной оператором ГП; контроль уровня давления в главной пневмолинии на основе электрического сигнала, получаемого от второго датчика давления; получение ЭБУ от оператора ГП информации о переходе к более высокой ступени давления в пневмомагистрали; увеличение мощности управляющего сигнала, подаваемого от МДС ЭБУ на первый ЭМ регулятора давления электропневматического блока управления клапанами и отсчет времени от момента подачи данного сигнала до достижения в пневмомагистрали максимального давления, соответствующего более высокой ступени, заданной оператором; контроль уровня давления в воздухосборнике на основе электрического сигнала, получаемого от третьего датчика; получение ЭБУ информации от оператора ГП о заданной более низкой ступени давления в пневмомагистрали; отключение первого ЭМ клапана управления регулятора давления от МДС и подачу управляющего сигнала от МДС на второй ЭМ клапана управления для отключения регулятора давления и закрытия тормозного прямоточного клапана; подачу управляющего сигнала от МДС на ЭМ второго пневмораспределителя; соединение управляющей полости растормаживающего прямоточного клапана с третьей пневмолинией, соединенной с воздухосборником; открытие растормаживающего прямоточного клапана до достижения в пневмолинии минимального давления в интервале заданной оператором ГП ступени; регистрацию через заданный интервал времени контроллером ЭБУ уровня давления, получаемого от второго датчика давления; достижение в пневмомагистрали минимального давления заданной ступени сбросом воздуха в атмосферу через открытый растормаживающий прямоточный клапан; подачу команды от ЭБУ на включение ЭМ первого двухпозиционного пневмораспределителя и отключение ЭМ второго двухпозиционного пневмораспределителя ЭП БУК; закрытие растормаживающего прямоточного клапана; поступление команды от ГП на ЭБУ на последующее изменение давления в пневмомагистрали; при получении задания о ступени давления воздуха в пневмомагистрали от оператора ГП контроллером ЭБУ в соответствии с управляющей программой задается скорость изменения давления воздуха в пневмомагистрали и на основе показаний первого и второго датчиков давления вычисляются скорости изменения давления в управляющей полости тормозного прямоточного клапана и в пневмомагистрали; если за заданный интервал времени открытия тормозного прямоточного клапана не достигнута заданная скорость изменения давления в пневмомагистрали, то производится увеличение мощности управляющего сигнала, подаваемого на первый ЭМ управления регулятора давления; если при заданном оператором ГП переходе к повышенной ступени давления воздуха в пневмомагистрали и ПЦ и вычисленной контроллером ЭБУ положительной скорости изменения давления в пневмомагистрали, меньшей заданной, то по команде от ЭБУ увеличивается мощность управляющего сигнала, подаваемого на первый ЭМ регулятора давления, величина открытия регулятора давления и тормозного прямоточного клапана; при заданном оператором ГП переходе к пониженной ступени давления воздуха в пневмомагистрали и при вычисленной контроллером ЭБУ положительной или нулевой скорости изменения давления при закрытом тормозном прямоточном клапане для открытия растормаживающего прямоточного клапана контроллер ЭБУ подает управляющий сигнал на отключение ЭМ первого пневмораспределителя и включение ЭМ второго пневмораспределителя.
Недостаток данного способа - отсутствие реакции системы управления на начало выжимания колес вагона из балочного вагонного замедлителя.
Общая техническая задача, решаемая изобретениями системы и способа, - устранение выжимания колес вагона из балочного вагонного замедлителя, способного привести к сходу вагона с рельсов.
Техническая задача решена в системе управления пневматическим приводом балочного вагонного замедлителя, состоящего из пневмоцилиндров привода каждого механизма, с главной пневмолинией, соединяющей пневмоцилиндры механизмов торможения колес вагона, содержащей воздухосборник, подсоединенный к главной пневмолинии, соединяющей пневмоцилиндры, по меньшей мере, одной пневмомагистралью, имеющей, по меньшей мере, один пневматический регулятор давления воздуха, поступающего из воздухосборника по пневмомагистрали и пневмолинии в пневмоцилиндры и выпускаемого из них в атмосферу, состоящий из конструктивно идентичных пневматически управляемых тормозного прямоточного клапана и растормаживающего прямоточного клапана; электропневматический блок управления клапанами пневматического регулятора давления воздуха, поступающего через фильтр из воздухосборника, управляемый двумя двухпозиционными пневмоклапанами с электромагнитным управлением; первую пневмолинию, соединяющую выходной патрубок регулятора давления с полостью, управляющей открытием тормозного прямоточного клапана, соединенную с пневматической полостью первого датчика давления; вторую пневмолинию, подсоединенную к главной пневмолинии и к пневматической части второго датчика давления и периодически подсоединяемую через первый двухпозиционный пневмораспределитель с электромагнитным управлением к полости, управляющей закрытием растормаживающего прямоточного клапана; третий датчик давления, пневматическая часть которого подсоединена к воздухосборнику; соединенный через БК с выходами управления от ГП ЭБУ электромагнитами ЭП БУК, состоящий из контроллера, энергонезависимой памяти, соединенных с контроллером; модуля аналоговых сигналов с подключенными к нему первым, вторым и третьим датчиками давления, модуля дискретных сигналов, соединенного с электромагнитами управления ЭП БУК в соответствии с программой, сохраняемой в блоке энергонезависимой памяти ЭБУ; БК, имеющего блок гальванических развязок и грозозащиты; пульта оператора с интерфейсом, блока диагностики, соединенного с БК, контроллером, энергонезависимой памятью, модулями аналоговых и дискретных сигналов; аварийного блока управления, подсоединенного к БК, контроллеру и пульту управления, при этом система имеет датчики положения левых и правых колес (ДНК) вагона, подключенные к модулю аналоговых сигналов, и датчики напряжений, установленные на рельсе (ДНР), подключенные к тензостанции, соединенной с модулем дискретных сигналов ЭБУ.
Способ управления пневматическим приводом балочного ВЗ, реализуемый с помощью описанной выше системы, включает получение ЭБУ от ГП информации о заданной ступени давления в пневмоцилиндрах пневматического привода ВЗ и об интервале времени на достижение заданного максимального для заданной ступени давления; получение ЭБУ сигналов от первого, второго и третьего датчиков давления; подачу управляющего сигнала от модуля дискретных сигналов ЭБУ на первый ЭМ управления регулятора давления ЭП БУК для включения регулятора давления и отсчет времени от момента подачи сигнала на первый ЭМ управления регулятора давления, открытие ТПК; контроль уровня давления в управляющей полости ТПК, регистрируемого первым датчиком давления, и регистрацию времени достижения в пневмоцилиндре максимального давления ступени, заданной оператором ГП; контроль уровня давления в главной пневмолинии на основе электрического сигнала, получаемого от второго датчика давления; получение ЭБУ от оператора ГП информации о переходе к более высокой ступени давления в пневмомагистрали; увеличение мощности управляющего сигнала, подаваемого от модуля дискретных сигналов ЭБУ на первый ЭМ РД ЭП БУК и отсчет времени от момента подачи данного сигнала до достижения в пневмомагистрали максимального давления, соответствующего более высокой ступени, заданной оператором ГП; контроль уровня давления в воздухосборнике на основе электрического сигнала, получаемого от третьего датчика; получение ЭБУ информации от оператора ГП о заданной более низкой ступени давления в пневмомагистрали; отключение первого ЭМ клапана управления регулятора давления от модуля дискретных сигналов и подачу управляющего сигнала от модуля дискретных сигналов на второй ЭМ клапана управления для отключения регулятора давления и закрытия ТПК; подачу управляющего сигнала от модуля дискретных сигналов на ЭМ второго пневмораспределителя; соединение управляющей полости РПК с третьей пневмолинией, соединенной с воздухосборником; открытие РПК до достижения в пневмолинии минимального давления в интервале заданной оператором ГП ступени; регистрацию через заданный интервал времени контроллером ЭБУ уровня давления, получаемого от второго датчика давления; достижение в пневмомагистрали минимального давления заданной ступени сбросом воздуха в атмосферу через открытый РПК; подачу команды от ЭБУ на включение ЭМ первого двухпозиционного пневмораспределителя и отключение ЭМ второго двухпозиционного пневмораспределителя ЭП БУК; закрытие РПК; поступление команды от оператора ГП на ЭБУ на последующее изменение давления в пневмомагистрали; при получении задания о ступени давления воздуха в пневмомагистрали от оператора ГП контроллером ЭБУ в соответствии с управляющей программой задается скорость изменения давления воздуха в пневмомагистрали и на основе показаний первого и второго датчиков давления вычисляются скорости изменения давления в управляющей полости ТПК и в пневмомагистрали; если за заданный интервал времени открытия ТПК не достигнута заданная скорость изменения давления в пневмомагистрали, то производится увеличение мощности управляющего сигнала, подаваемого на первый ЭМ управления РД; если при заданном оператором ГП переходе к повышенной ступени давления воздуха в пневмомагистрали и пневмоцилиндрах и вычисленной контроллером ЭБУ положительной скорости изменения давления в пневмомагистрали, меньшей заданной, то по команде от ЭБУ увеличивается мощность управляющего сигнала, подаваемого на первый ЭМ РД, величина открытия РД и ТПК; при заданном оператором ГП переходе к пониженной ступени давления воздуха в пневмомагистрали и при вычисленной контроллером ЭБУ положительной или нулевой скорости изменения давления при закрытом ТПК для открытия РПК контроллер ЭБУ подает управляющий сигнал на отключение ЭМ первого пневмораспределителя и включение ЭМ второго пневмораспределителя, при этом ЭБУ опрашивает ДНР и ДПК, сохраняет текущие показания ДНР и ДПК в энергонезависимой памяти; записанная в энергонезависимой памяти ЭБУ программа использует текущие показания ДНР и ДПК для определения текущего положения поверхности катания колеса относительно поверхности катания рельса; при обнаружении ЭБУ уменьшения напряжений в рельсах и зазора между поверхностью катания рельса и поверхностью катания колеса более 10% от высоты гребня колеса; программой в памяти ЭБУ проводится расчет скорости сброса давления РД, затем ЭБУ подает на РД сигнал на уменьшение давления в пневмоцилиндрах, на величину соответствующую снижению давления на 1/2 последнего приращения давления Р.
Решение технической задачи, - устранение выжимания колес вагона из балочного ВЗ, способного привести к сходу вагона с рельсов, достигается за счет следующих отличительных признаков системы: система имеет датчики положения левых и правых колес (ДПК) вагона, подключенные к модулю аналоговых сигналов, и датчики напряжений, установленные на рельсе (ДНР), подключенные к тензостанции, соединенной с модулем дискретных сигналов.
Техническая задача решена за счет следующей совокупности отличительных признаков способа: ЭБУ опрашивает ДНР и ДПК, сохраняет текущие показания ДНР и ДПК в энергонезависимой памяти; записанная в энергонезависимой памяти ЭБУ программа использует текущие показания ДНР и ДПК для определения текущего положения поверхности катания колеса относительно поверхности катания рельса; при обнаружении ЭБУ уменьшения напряжений в рельсах и зазора между поверхностью катания рельса и поверхностью катания колеса более 10% от высоты гребня колеса; программой в памяти ЭБУ проводится расчет скорости сброса давления РД, затем ЭБУ подает на РД сигнал на уменьшение давления в пневмоцилиндрах, на величину соответствующую снижению давления на 1/2 последнего приращения давления Р.
Приведенные совокупности отличительных признаков системы и способа управления пневматическим приводом балочного ВЗ не обнаружены в процессе патентно-информационного поиска, следовательно, заявленные система и способ управления соответствуют критерию «новизна». Совокупности отличительных признаков системы и способа управления не следуют явно из уровня техники, следовательно, система и способ соответствуют критерию «изобретательский уровень».
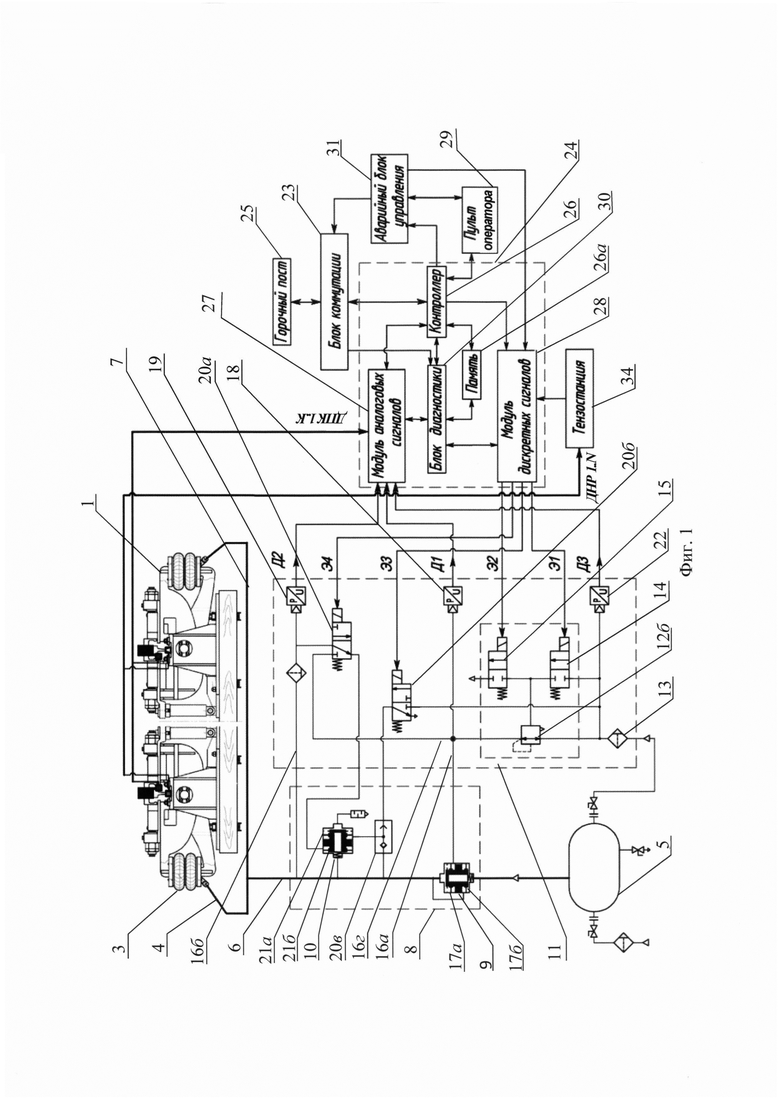
На фиг. 1 показана блок-схема системы управления пневматическим приводом балочного ВЗ с ДНР и ДПК.
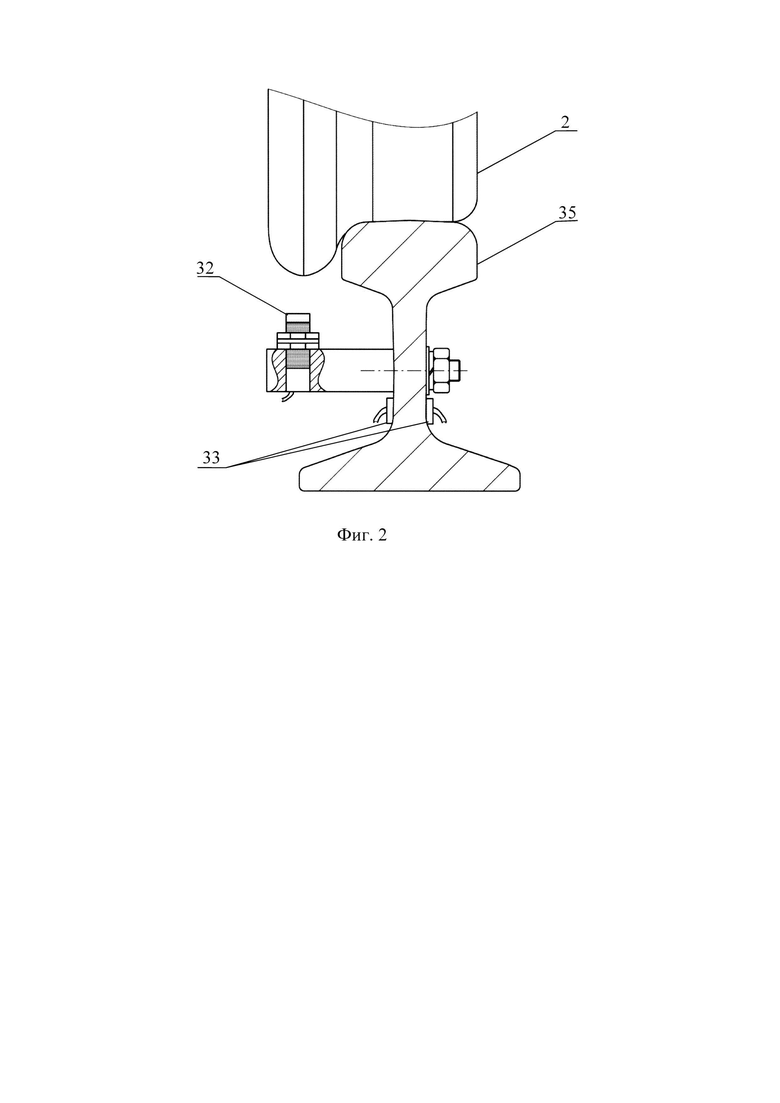
На фиг. 2 показана схема размещения ДНР и ДПК.
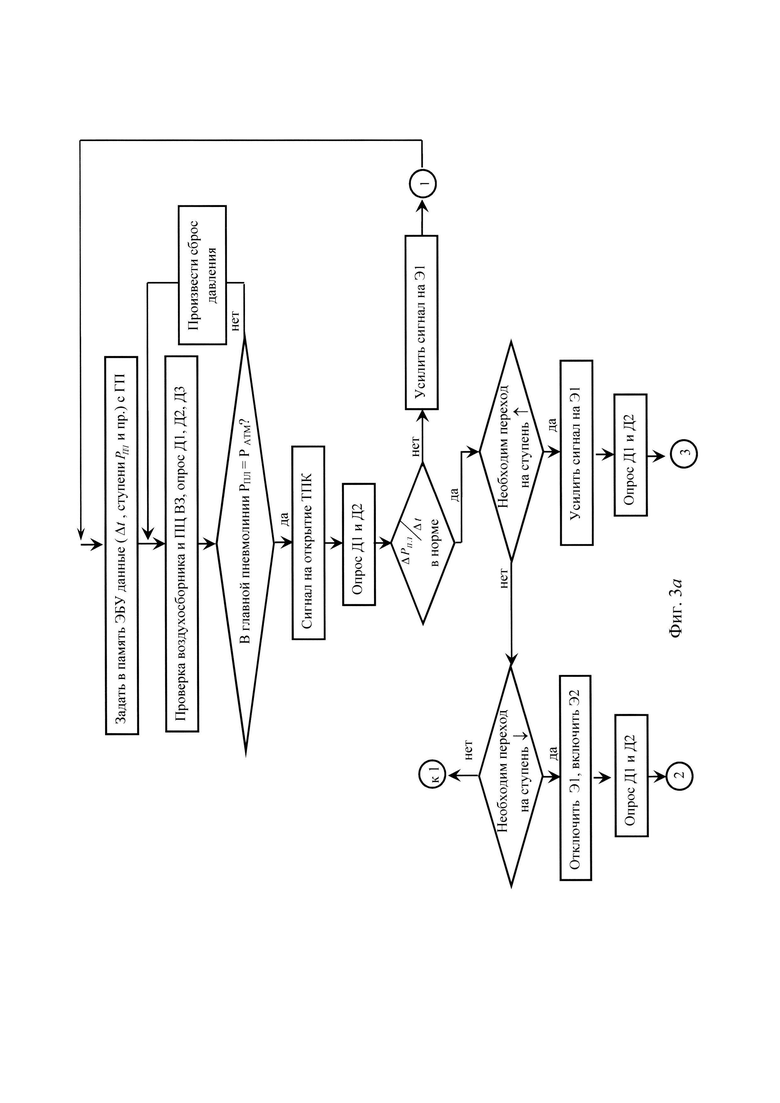
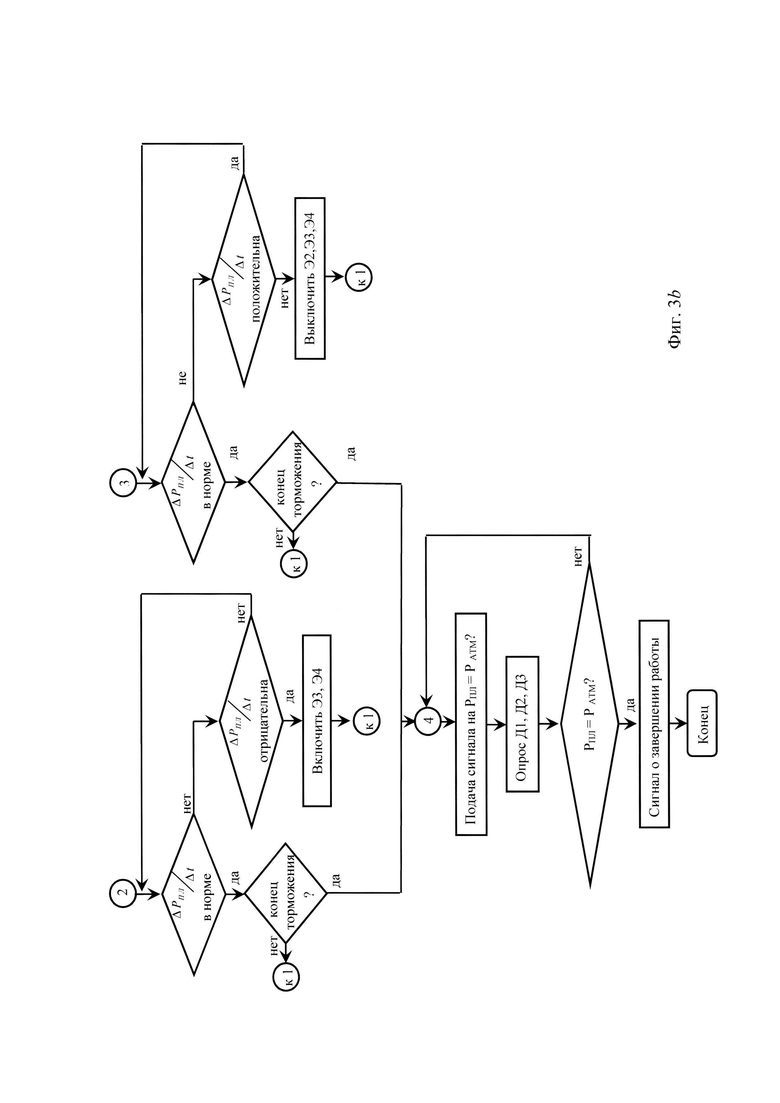
На фиг. 3а, 3b, 3с показан алгоритм способа работы системы управления пневматического привода балочного ВЗ с ДНР и ДПК.
Обозначения, принятые на фиг. 1-3:
1 - механизмы торможения;
2 - колеса вагона
3 - пневмоцилиндры;
4 - главная пневмолиния;
5 - воздухосборник;
6 - главная пневмолиния;
7 - пневмомагистраль;
8 - регулятор давления (РД);
9 - тормозной прямоточный клапан (ТПК);
10 - растормаживающий прямоточный клапан (РПК);
11 - электропневматический блок управления пневмоклапанами (ЭП БУК);
12а - пневматический регулятор давления (ПРД);
12б - регулятор давления (РД);
13 - фильтр;
14 - двухпозиционный пневмоклапан;
15 - двухпозиционный пневмоклапан;
16а - первая пневмолиния;
16б - вторая пневмолиния;
16в - третья пневмолиния;
16г - четвертая пневмолиния;
17а - полость, управляющая открытием ТПК;
17б - полость, управляющая закрытием ТПК;
18 - первый датчик давления;
19 - второй датчик давления;
20а - первый двухпозиционный пневмораспределитель (ДПР);
20б - второй ДПР;
20в - клапан «или»;
21а - полость, управляющая открытием РПК;
21б - полость, управляющая закрытием РПК;
22 - третий датчик давления;
23 - блок коммутации (БК);
24 - электронный блок управления электромагнитами (ЭБУ);
25 - горочный пост (ГП);
26 - контроллер;
26а - энергонезависимая память контроллера;
27 - модуль аналоговых сигналов;
28 - модуль дискретных сигналов;
29 - пульт оператора с интерфейсом;
30 - блок диагностики;
31 - аварийный блок управления;
32 - датчики положения левых и правых колес (ДПК);
33 - датчик напряжения, установленный на рельсе (ДНР);
34 - тензостанция;
35 - рельсы.
Система управления пневматическим приводом ВЗ (фиг. 1-2) с механизмами 1 торможения правых и левых колес 2 вагона с пневмоцилиндрами 3 привода каждого механизма 1, с главной пневмолинией 4, соединяющей пневмоцилиндры 3 механизмов 1 торможения колес 2 вагона, содержит: воздухосборник 5, подсоединенный к главной пневмолинии 6, соединяющей пневмоцилиндры 3, по меньшей мере, одной пневмомагистралью 7, имеющей, по меньшей мере, один ПРД 8 воздуха, поступающего из воздухосборника 5 по пневмомагистрали 7 и пневмолинии 6 в пневмоцилиндры 3 и выпускаемого из них в атмосферу, состоящий из конструктивно идентичных пневматически управляемых ТПК 9 и РПК 10; электропневматический блок 11 управления пневмоклапанами пневматического регулятора 12а давления, включающий регулятор 12б давления воздуха, поступающего через фильтр 13 из воздухосборника 5, управляемый двумя двухпозиционными пневмоклапанами (14, 15) с электромагнитным управлением (Э1 и Э2 соответственно); первую пневмолинию 16а, соединяющую выходной патрубок регулятора 12а давления с полостью 17а, соединенную с пневматической полостью первого датчика 18 давления Д1 и управляющую открытием ТПК 9, имеющего полость 17б, управляющую его закрытием; вторую пневмолинию 16б, подсоединенную к главной пневмолинии 4 и к пневматической части второго датчика 19 давления Д2 и периодически соединяемую через первый двухпозиционный пневмораспределитель (ДПР) 20 с электромагнитным управлением к полости 21б, управляющей (ЭМ Э4) закрытием РПК 10, полость 21а которого управляет его открытием; третью пневмолинию 16в и управляемый ЭМ ЭЗ второй ДПР 20б, через которые к воздухосборнику 5 через клапан 20в «или» к пневмомагистрали 7 подсоединена полость 21а РПК 10; четвертую пневмолинию 16г, через которую управляющая закрытием РПК 10 полость 216 соединяется с первым ДПР 20а; третий датчик 22 давления Д3, пневматическая часть которого подсоединена к воздухосборнику 5; БК 23, имеющий блок (не показан) гальванических развязок и грозозащиты; ЭБУ 24 электромагнитами ЭП БУК 11, входы которого соединены через БК 23 с выходами управления от ГП 25, состоящий из контроллера 26, энергонезависимой памяти 26а, соединенных с модулем 27 аналоговых сигналов, модулем 28 дискретных сигналов, соединяемого с электромагнитами Э1, Э2, Э3, Э4 управления ЭП БУК 11; пульт 29 оператора с интерфейсом; первый, второй и третий датчики (18, 19, 22) давления соединены с модулем 27 аналоговых сигналов ЭБУ 24; модуль 28 дискретных сигналов ЭБУ 24 соединяется с электромагнитами Э1, Э2, Э4, Э4 управления пневмоклапанами (14, 15) регулятора 12а давления ЭП БУК 11 пневмоклапанами (14, 15) и первым и вторым электромагнитами двухпозиционных пневмораспре-делителей (20а, 20б), управляемыми в соответствии с программой, сохраняемой в энергонезависимой памяти 26а контроллера 26; блок 30 диагностики, соединенный с БК 23, контроллером 26, энергонезависимой памятью 26а, модулями (27, 28) аналоговых и дискретных сигналов; аварийный блок 31 управления, подсоединенный к БК 23, контроллеру 26 и пульту 29 оператора с интерфейсом, при этом система имеет датчики 32 положения левых и правых колес 2 (ДПК), подключенные к модулю 27 аналоговых сигналов; датчики 33 напряжений, установленные на каждом рельсе (ДНР), подключенные к тензостанции 34, соединенной с модулем 28 дискретных сигналов.
Модуль 28 дискретных сигналов ЭБУ 24 имеет модуль широтно-импульсной модуляции (не показан).
Способ управления пневматическим приводом балочного ВЗ, реализуемый с помощью описанной выше системы, в соответствии с пунктом 3 формулы показан на фиг. 3а, 3b, 3с.
Способ управления системой управления пневматическим приводом ВЗ, описанной выше, включает: получение ЭБУ 24 данных от ГП 25 о заданной ступени давления в пневмоцилиндрах 3 пневматического привода ВЗ и интервала времени на достижение заданного максимального для данного интервала давления, получение ЭБУ 24 сигналов от первого, второго и третьего датчиков (18, 19, 22) давления; подачу управляющего сигнала от модуля 28 дискретных сигналов электронного блока 24 управления на первый ЭМ Э1 управления регулятора 8 давления ЭП БУК 11 для включения регулятора 12а давления и отсчет времени от момента подачи сигнала на первый ЭМ Э1 управления регулятора 8 давления, открытие ТПК 9; контроль уровня давления в управляющей на полости ТПК 9, регистрируемого первым датчиком 18 давления, и регистрация времени достижения в пневмоцилиндре 3 максимального давления ступени, заданной оператором ГП 25; контроль уровня давления в главной пневмолинии 4 на основе электрического сигнала, получаемого от второго датчика 19 давления; получение ЭБУ 24 от оператора ГП 25 информации о переходе к более высокой ступени давления в пневмомагистрали 7; увеличение мощности управляющего сигнала, подаваемого от модуля 28 дискретных сигналов ЭБУ 24 на первый ЭМ Э1 регулятора 8 давления ЭП БУК 11 и отсчет времени от момента подачи данного сигнала до достижения в пневмомагистрали 7 максимального давления, соответствующего более высокой ступени, заданной оператором; опрос электронным блоком 24 ДНР 33 и ДПК 32, установленных до и в зоне балочного ВЗ; сохранение текущих показаний ДНР 33 и ДПК 32, установленных до и в зоне балочного ВЗ, в энергонезависимой памяти 26а контроллера 26 после подачи от ЭБУ 24 сигнала на изменение давления; использование программой, записанной в энергонезависимой памяти 26а контроллера 26, текущих показаний ДНР 33 и ДПК 32, установленных до и в зоне балочного ВЗ, для определения текущего положения поверхности катания колеса 2 относительно поверхности катания рельса 35; проведение расчета скорости  сброса давления РД 8 программой в энергонезависимой памяти 26а контроллера 26 ЭБУ 24, если программа определила зазор между поверхностью катания колеса 2 и поверхностью катания рельса 35 более 10% от высоты гребня колеса; подачу сигнала на РД 8, соответствующего снижению давления в пневмоцилиндрах 3 ВЗ на 1/2 последнего приращения давления; при этом управляющие сигналы на электромагниты Э1, Э2 первого и второго пневмоклапанов (14, 15) РД 8 и электромагниты Э3, Э4 первого и второго двухпозиционных пневмораспределителей (20а, 20б) могут быть заданы в виде набора импульсов, амплитуда, частота и скважность которых определяется программой контроллера 26 на основании показаний датчиков (18, 19, 22) давления; контроль уровня давления в воздухосборнике 5 на основе электрического сигнала, получаемого от третьего датчика 22; получение ЭБУ 24 информации от оператора ГП 25 о заданной более низкой ступени давления в пневмомагистрали 7; отключение первого ЭМ Э1 клапана 14 управления регулятора 8 давления от модуля 28 дискретных сигналов и подача управляющего сигнала от модуля 28 дискретных сигналов на второй ЭМ Э2 клапана 15 управления для отключения регулятора 8 давления и закрытия ТПК 9; подача управляющего сигнала от модуля 28 дискретных сигналов на ЭМ Э2 второго двухпозиционного пневмораспределителя 206; соединение управляющей полости 21а РПК 10 с третьей пневмолинией 16в, соединенной с воздухосборником 5; открытие РПК 10 до достижения в пневмоцилиндрах 3 минимального давления в интервале заданной оператором ГП 25 ступени; регистрация через заданный интервал времени контроллером 26 ЭБУ 24 уровня давления, получаемого от второго датчика 19 давления; достижение в пневмомагистрали 7 минимального давления сбросом воздуха в атмосферу через открытый РПК 10; подачу команды от ЭБУ 24 на включение ЭМ Э1 первого двухпозиционного пневмораспределителя 20а и отключение ЭМ Э2 второго двухпозиционного пневмораспределителя 206 электропневматического блока 24 управления клапанами; закрытие РПК 10; поступление команды от оператора ГП 25 на ЭБУ 24 на последующее изменение давления в пневмомагистрали 7; при получении задания о ступени давления воздуха в пневмомагистрали 7 от оператора ГП 25 контроллером 26 ЭБУ 24 в соответствии с управляющей программой задается скорость изменения давления воздуха в пневмомагистрали 7 и на основе показаний первого и второго датчиков (18, 19) давления вычисляются скорости изменения давления в управляющей полости 17а ТПК 9 и в пневмомагистрали 7; если за заданный интервал времени открытия ТПК 9 не достигнута заданная скорость изменения давления в пневмомагистрали 7, то производится увеличение мощности управляющего сигнала, подаваемого на первый ЭМ Э1 управления регулятора 8 давления; если при заданном оператором ГП 25 переходе к повышенной ступени давления воздуха в пневмомагистрали 7 и пневмоцилиндрах 3 и вычисленной контроллером 26 ЭБУ 24 положительной скорости изменения давления в пневмомагистрали 7, меньшей заданной, то по команде от ЭБУ 24 увеличивается мощность управляющего сигнала, подаваемого на первый ЭМ Э1 регулятора 8 давления, величина открытия регулятора 8 давления и ТПК 9; при заданном оператором ГП 25 переходе к пониженной ступени давления воздуха в пневмомагистрали 7 и при вычисленной контроллером 26 ЭБУ 24 положительной или нулевой скорости изменения давления при закрытом ТПК 9 для открытия РПК 10 контроллер 26 ЭБУ 24 подает управляющий сигнал на отключение ЭМ Э3 первого двухпозиционного пневмораспределителя 20а и включение ЭМ Э4 второго двухпозиционного пневмораспределителя 20б.
сброса давления РД 8 программой в энергонезависимой памяти 26а контроллера 26 ЭБУ 24, если программа определила зазор между поверхностью катания колеса 2 и поверхностью катания рельса 35 более 10% от высоты гребня колеса; подачу сигнала на РД 8, соответствующего снижению давления в пневмоцилиндрах 3 ВЗ на 1/2 последнего приращения давления; при этом управляющие сигналы на электромагниты Э1, Э2 первого и второго пневмоклапанов (14, 15) РД 8 и электромагниты Э3, Э4 первого и второго двухпозиционных пневмораспределителей (20а, 20б) могут быть заданы в виде набора импульсов, амплитуда, частота и скважность которых определяется программой контроллера 26 на основании показаний датчиков (18, 19, 22) давления; контроль уровня давления в воздухосборнике 5 на основе электрического сигнала, получаемого от третьего датчика 22; получение ЭБУ 24 информации от оператора ГП 25 о заданной более низкой ступени давления в пневмомагистрали 7; отключение первого ЭМ Э1 клапана 14 управления регулятора 8 давления от модуля 28 дискретных сигналов и подача управляющего сигнала от модуля 28 дискретных сигналов на второй ЭМ Э2 клапана 15 управления для отключения регулятора 8 давления и закрытия ТПК 9; подача управляющего сигнала от модуля 28 дискретных сигналов на ЭМ Э2 второго двухпозиционного пневмораспределителя 206; соединение управляющей полости 21а РПК 10 с третьей пневмолинией 16в, соединенной с воздухосборником 5; открытие РПК 10 до достижения в пневмоцилиндрах 3 минимального давления в интервале заданной оператором ГП 25 ступени; регистрация через заданный интервал времени контроллером 26 ЭБУ 24 уровня давления, получаемого от второго датчика 19 давления; достижение в пневмомагистрали 7 минимального давления сбросом воздуха в атмосферу через открытый РПК 10; подачу команды от ЭБУ 24 на включение ЭМ Э1 первого двухпозиционного пневмораспределителя 20а и отключение ЭМ Э2 второго двухпозиционного пневмораспределителя 206 электропневматического блока 24 управления клапанами; закрытие РПК 10; поступление команды от оператора ГП 25 на ЭБУ 24 на последующее изменение давления в пневмомагистрали 7; при получении задания о ступени давления воздуха в пневмомагистрали 7 от оператора ГП 25 контроллером 26 ЭБУ 24 в соответствии с управляющей программой задается скорость изменения давления воздуха в пневмомагистрали 7 и на основе показаний первого и второго датчиков (18, 19) давления вычисляются скорости изменения давления в управляющей полости 17а ТПК 9 и в пневмомагистрали 7; если за заданный интервал времени открытия ТПК 9 не достигнута заданная скорость изменения давления в пневмомагистрали 7, то производится увеличение мощности управляющего сигнала, подаваемого на первый ЭМ Э1 управления регулятора 8 давления; если при заданном оператором ГП 25 переходе к повышенной ступени давления воздуха в пневмомагистрали 7 и пневмоцилиндрах 3 и вычисленной контроллером 26 ЭБУ 24 положительной скорости изменения давления в пневмомагистрали 7, меньшей заданной, то по команде от ЭБУ 24 увеличивается мощность управляющего сигнала, подаваемого на первый ЭМ Э1 регулятора 8 давления, величина открытия регулятора 8 давления и ТПК 9; при заданном оператором ГП 25 переходе к пониженной ступени давления воздуха в пневмомагистрали 7 и при вычисленной контроллером 26 ЭБУ 24 положительной или нулевой скорости изменения давления при закрытом ТПК 9 для открытия РПК 10 контроллер 26 ЭБУ 24 подает управляющий сигнал на отключение ЭМ Э3 первого двухпозиционного пневмораспределителя 20а и включение ЭМ Э4 второго двухпозиционного пневмораспределителя 20б.
Описанный способ управления выполняется в соответствии с программой, загружаемой в контроллер 26 или в энергонезависимую память 26а электронного блока 24 управления для исполнения действий в соответствии с заданным алгоритмом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления пневматическим приводом вагонного замедлителя | 2021 |
|
RU2773117C1 |
| Автоматизированная система и способ управления пневматическим приводом вагонного замедлителя | 2021 |
|
RU2779263C1 |
| Автоматизированная система и способ управления пневматическим приводом вагонного замедлителя | 2020 |
|
RU2758581C1 |
| Система и способ управления пневматическим приводом вагонного замедлителя | 2020 |
|
RU2750559C1 |
| Вагонный замедлитель, система и способ управления вагонным замедлителем | 2023 |
|
RU2808315C1 |
| Устройство управления пневматическим приводом вагонного замедлителя | 2017 |
|
RU2689468C2 |
| ВОЗДУХОСБОРНИК С АВТОМАТИЧЕСКИМ УПРАВЛЕНИЕМ ПНЕВМАТИЧЕСКОГО ВАГОННОГО ЗАМЕДЛИТЕЛЯ | 2007 |
|
RU2368524C2 |
| ТРИБОТЕХНИЧЕСКИЙ СПОСОБ НАНЕСЕНИЯ ПОКРЫТИЯ ИЗ ПЛАСТИЧНЫХ МЕТАЛЛОВ НА ПОВЕРХНОСТИ ТРЕНИЯ ДЕТАЛЕЙ СОЧЛЕНЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2283702C2 |
| СПОСОБ ЗАЩИТЫ КОЛЕСНЫХ ПАР И РЕЛЬСОВОГО ПОЛОТНА ОТ ИЗНОСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2719512C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ СКОРОСТИ ВАГОНОВ/СОСТАВА ДОМКРАТОВИДНЫМИ ЗАМЕДЛИТЕЛЯМИ | 2021 |
|
RU2761123C1 |
Изобретение предназначено для использования на железнодорожном транспорте в системах автоматики и телемеханики балочных вагонных замедлителей (ВЗ) на сортировочных горках, предотвращающих выжимание колес. Система управления пневматическим приводом (ПП) ВЗ имеет электропневматический блок управления клапанами, датчики давления в главной пневмолинии, воздухосборнике и управляющей полости тормозного клапана; пневмораспределители с электромагнитами, управляющие растормаживающим клапаном; блок коммутации; электронный блок управления (ЭБУ) с модулями аналоговых и дискретных сигналов управления электромагнитами, входы которого соединены через контроллер и блок коммутации с выходами управления от горочного поста (ГП), при этом система имеет датчики положения поверхностей катания левых и правых колес вагона относительно поверхностей катания рельсов, установленные до ВЗ, и датчики в зоне ВЗ, подключенные к модулю аналоговых сигналов ЭБУ, и датчики напряжений, установленные на рельсе до ВЗ и в зоне ВЗ, подключенные к тензостанции, соединенной с модулем дискретных сигналов ЭБУ. Способ управления описанной системой ПП ВЗ реализуется в соответствии с программой, загружаемой в ЭБУ для исполнения действий в соответствии с алгоритмом, при этом ЭБУ опрашивает ДНР и ДПК и сохраняет их текущие показания; программа сравнивает показания ДНР и ДПК, расположенных в зоне балочного ВЗ, с показаниями ДНР и ДПК, установленных до въезда колес в зону балочного ВЗ, для определения текущего положения поверхности катания колеса относительно поверхности катания рельса; при уменьшении напряжений в рельсах и увеличении зазора между поверхностями катания рельсов и колес программа управляет сбросом давления в пневмоцилиндрах для уменьшения силы торможения. Технический результат - устранение выжимания колес вагона из балочного ВЗ, способного привести к сходу вагона с рельсов. 2 н. и 3 з.п. ф-лы, 3 ил.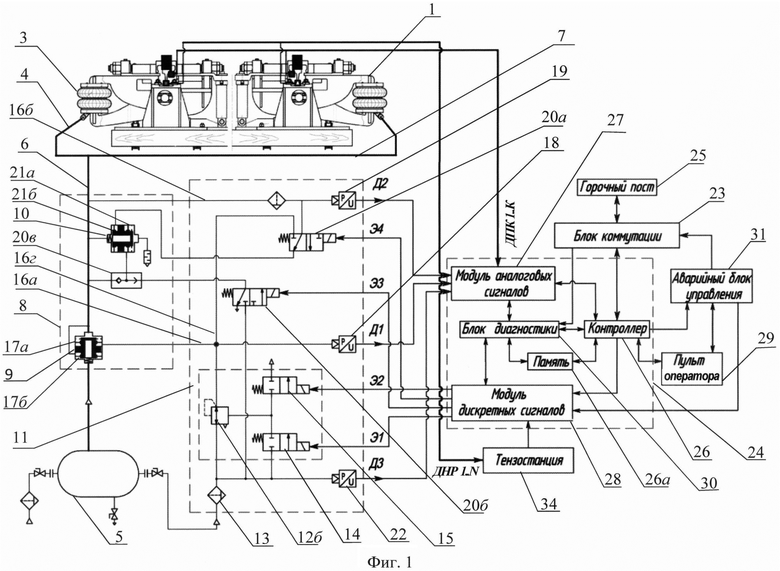
1. Система управления пневматическим приводом вагонного замедлителя (ВЗ) с механизмами торможения правых и левых колес вагона с пневмоцилиндрами привода каждого механизма, с главной пневмолинией, соединяющей пневмоцилиндры механизмов торможения колес вагона, содержащая воздухосборник, подсоединенный к главной пневмолинии, соединяющей пневмоцилиндры, по меньшей мере, одной пневмомагистралью, имеющей, по меньшей мере, один пневматический регулятор давления воздуха, поступающего из воздухосборника по пневмомагистрали и пневмолинии в пневмоцилиндры и выпускаемого из них в атмосферу, состоящий из конструктивно идентичных пневматически управляемых тормозного прямоточного клапана и растормаживающего прямоточного клапана; электропневматический блок управления клапанами пневматического регулятора давления, включающий регулятор давления воздуха, поступающего через фильтр из воздухосборника, управляемый двумя двухпозиционными пневмоклапанами с электромагнитным управлением; первую пневмолинию, соединяющую выходной патрубок регулятора давления с полостью, соединенную с пневматической полостью первого датчика давления и управляющую открытием тормозного прямоточного клапана, имеющего полость, управляющую его закрытием; вторую пневмолинию, подсоединенную к главной пневмолинии и к пневматической части второго датчика давления и периодически соединяемую через первый двухпозиционный пневмораспределитель с электромагнитным управлением к полости, управляющей закрытием растормаживающего прямоточного клапана полость которого управляет его открытием; третью пневмолинию и управляемый электромагнит второго двухпозиционного пневмораспределителя, через которые к воздухосборнику через клапан «или» к пневмомагистрали подсоединена полость растормаживающего прямоточного клапана; четвертую пневмолинию, через которую управляющая закрытием растормаживающего прямоточного клапана полость соединяется с первым двухпозиционным пневмораспределителем; третий датчик давления, пневматическая часть которого подсоединена к воздухосборнику; соединенный через блок коммутации с выходами управления от горочного поста ЭБУ электромагнитами электропневматического блока управления, состоящий из контроллера, энергонезависимой памяти, соединенных с контроллером, модуля аналоговых сигналов с подключенными к нему первым, вторым и третьим датчиками давления, модуля дискретных сигналов, соединенного с электромагнитами управления электропневматического блока управления клапанами в соответствии с программой, сохраняемой в блоке энергонезависимой памяти ЭБУ; блок коммутации, имеющий блок гальванических развязок и грозозащиты; пульт оператора с интерфейсом; блок диагностики, соединенный с блоком коммутации, контроллером, энергонезависимой памятью, модулями аналоговых и дискретных сигналов; аварийный блок управления, подсоединенный к блоку коммутации, контроллеру и пульту управления,
отличающаяся тем, что система имеет датчики положения поверхностей катания левых и правых колес (ДПК) вагона относительно поверхностей катания рельсов, установленные до въезда колес в балочный ВЗ, и аналогичные датчики, установленные в зоне балочного ВЗ, подключенные к модулю аналоговых сигналов, и датчики напряжений, установленные на рельсе (ДНР), установленные на рельсе до въезда колес в балочный ВЗ, и аналогичные датчики напряжений в рельсе (ДНР), установленные на рельсе в зоне балочного ВЗ, подключенные к тензостанции, соединенной с модулем дискретных сигналов электронного блока управления.
2. Система по п. 1, отличающаяся тем, что модуль дискретных сигналов ЭБУ имеет модуль широтно-импульсной модуляции.
3. Способ управления системой управления пневматическим приводом вагонного замедлителя, описанной в любом из пп. 1, 2, включающий получение ЭБУ данных от горочного поста о заданной ступени давления в пневмоцилиндрах пневматического привода вагонного замедлителя и интервала времени на достижение заданного максимального для данного интервала давления, получение ЭБУ сигналов от первого, второго и третьего датчиков давления; подачу управляющего сигнала от модуля дискретных сигналов ЭБУ на первый электромагнит управления регулятора давления электропневматического блока управления клапанами для включения регулятора давления и отсчет времени от момента подачи сигнала на первый электромагнит управления регулятора давления, открытие тормозного прямоточного клапана; контроль уровня давления в управляющей полости тормозного прямоточного клапана, регистрируемого первым датчиком давления, и регистрация времени достижения в пневмоцилиндре максимального давления ступени, заданной оператором горочного поста; контроль уровня давления в главной пневмолинии на основе электрического сигнала, получаемого от второго датчика давления; получение ЭБУ от оператора горочного поста информации о переходе к более высокой ступени давления в пневмомагистрали; увеличение мощности управляющего сигнала, подаваемого от модуля дискретных сигналов электронного блока управления на первый электромагнит регулятора давления электропневматического блока управления клапанами и отсчет времени от момента подачи данного сигнала до достижения в пневмомагистрали максимального давления, соответствующего более высокой ступени, заданной оператором; контроль уровня давления в воздухосборнике на основе электрического сигнала, получаемого от третьего датчика; получение ЭБУ информации от оператора горочного поста о заданной более низкой ступени давления в пневмомагистрали; отключение первого электромагнита клапана управления регулятора давления от модуля дискретных сигналов и подача управляющего сигнала от модуля дискретных сигналов на второй электромагнит клапана управления для отключения регулятора давления и закрытия тормозного прямоточного клапана; подача управляющего сигнала от модуля дискретных сигналов на электромагнит второго пневмораспределителя; соединение управляющей полости растормаживающего прямоточного клапана с третьей пневмолинией, соединенной с воздухосборником; открытие растормаживающего прямоточного клапана до достижения в пневмолинии минимального давления в интервале заданной оператором горочного поста ступени; регистрация через заданный интервал времени контроллером ЭБУ уровня давления, получаемого от второго датчика давления; достижение в пневмомагистрали минимального давления заданной ступени сбросом воздуха в атмосферу через открытый растормаживающий прямоточный клапан; снижение давление в пневмомагистрали до атмосферного; подачу команды от ЭБУ на включение электромагнита первого двухпозиционного пневмораспределителя и отключение электромагнита второго двухпозиционного пневмораспределителя электропневматического блока управления клапанами; закрытие растормаживающего прямоточного клапана; поступление команды от горочного поста на ЭБУ на последующее изменение давления в пневмомагистрали; при получении задания о ступени давления воздуха в пневмомагистрали от оператора горочного поста контроллером электронного блока управления в соответствии с управляющей программой задается скорость изменения давления воздуха в пневмомагистрали и на основе показаний первого и второго датчиков давления вычисляются скорости изменения давления в управляющей полости тормозного прямоточного клапана и в пневмомагистрали; если за заданный интервал времени открытия тормозного прямоточного клапана не достигнута заданная скорость изменения давления в пневмомагистрали, то производится увеличение мощности управляющего сигнала, подаваемого на первый электромагнит управления регулятора давления; если при заданном оператором горочного поста переходе к повышенной ступени давления воздуха в пневмомагистрали и пневмоцилиндрах и вычисленной контроллером ЭБУ положительной скорости изменения давления в пневмомагистрали, меньшей заданной, то по команде от ЭБУ увеличивается мощность управляющего сигнала, подаваемого на первый электромагнит регулятора давления, величина открытия регулятора давления и тормозного прямоточного клапана; при заданном оператором горочного поста переходе к пониженной ступени давления воздуха в пневмомагистрали и при вычисленной контроллером ЭБУ положительной или нулевой скорости изменения давления при закрытом тормозном прямоточном клапане для открытия растормаживающего прямоточного клапана контроллер ЭБУ подает управляющий сигнал на отключение электромагнита первого пневмораспределителя и включение электромагнита второго пневмораспределителя, отличающийся тем, что при движении вагона ЭБУ опрашивает ДНР и ДПК, установленные до въезда колес в зону балочного ВЗ, и сохраняет текущие показания ДНР и ДПК в энергонезависимой памяти; ЭБУ опрашивает ДНР и ДПК, установленные в зоне балочного ВЗ, и сохраняет текущие показания ДНР и ДПК в энергонезависимой памяти; записанная в энергонезависимой памяти ЭБУ программа сравнивает показания ДНР и ДПК, расположенных в зоне балочного ВЗ, с показаниями ДНР и ДПК, установленных до въезда колес в зону балочного ВЗ, для определения текущего положения поверхности катания колеса относительно поверхности катания рельса; при обнаружении ЭБУ уменьшения напряжений в рельсах и зазора между поверхностью катания рельса и поверхностью катания колеса более 10% от высоты гребня колеса; программой в памяти ЭБУ проводится расчет скорости сброса давления РД, затем ЭБУ подает на РД сигнал на уменьшение давления в пневмоцилиндрах, на величину соответствующую снижению давления на 1/2 последнего приращения давления Р.
4. Способ управления по п. 3, отличающийся тем, что управляющие сигналы на электромагниты первого и второго пневмоклапанов регулятора давления и электромагниты первого и второго пневмораспределителей могут быть заданы в виде набора импульсов, амплитуда, частота и скважность которых определяется программой контроллера на основании показаний датчиков давления.
5. Способ управления по п. 3 или 4, отличающийся тем, что управление системой выполняется в соответствии с программой, загружаемой в энергонезависимую память ЭБУ для исполнения действий в соответствии с заданным алгоритмом.
| БЕСКОНТАКТНЫЙ ПРОФИЛОМЕР ДЛЯ КОНТРОЛЯ МИКРОГЕОМЕТРИИ КОЛЛЕКТОРОВ аЛЕКТРИЧЕСКИХ МАШИН | 0 |
|
SU213954A1 |
| Автоматизированная система и способ управления пневматическим приводом вагонного замедлителя | 2021 |
|
RU2779263C1 |
| Система управления пневматическим приводом вагонного замедлителя | 2021 |
|
RU2773117C1 |

