Область техники, к которой относится изобретение
Изобретение относится к способам магнитного управления плазмой в D-образных токамаках (вытянутых по вертикали токамаках с D-образной плазмой) с обратной связью, а именно, к способам каскадного многоуровневого широтно-импульсного цифрового управления положением плазмы в токамаках, и может быть использовано, например, для стабилизации неустойчивого вертикального или горизонтального положения плазмы.
Уровень техники
Конструкция токамака (тороидальная камера с магнитными катушками) представляет собой трансформатор, в первичную обмотку которого поступает импульс тока от внешнего источника энергии, а плазменный виток является вторичным витком трансформатора, в котором протекает ток, нагревающий плазму. Также для дополнительного нагрева плазмы используют инжекторы нейтральных атомов и СВЧ электромагнитные колебания. Разного сорта неустойчивости плазмы подавляются сильным тороидальным полем, создаваемым обмоткой тороидального поля.
Под положением плазмы понимают положение ее магнитной оси. В горизонтальном направлении плазма, в целом, устойчива, однако подвержена действию расталкивающих сил от газокинетического давления и электродинамических сил, т.к. по плазменному тороидальному шнуру протекает ток, противоположные элементы которого отталкиваются друг от друга. Вертикальное магнитное поле создает стягивающие силы, управление которыми стабилизирует положение плазмы. Плазма магнитными полями вытягивается в вертикальном направлении для повышения давления при том же тороидальном поле, но из-за этого становится неустойчивой в вертикальном направлении, что требует применения систем управления вертикальным положением плазмы с обратной связью посредством горизонтального магнитного поля.
Из уровня техники известен способ импульсного управления плазмой в D-образном токамаке, в котором раскрываются принципы управления вертикальным положением плазмы, для чего используют инвертор тока, работающий в автоколебательном режиме, и создающий напряжение на обмотке горизонтального поля (Kuznetsov E.A., Mitrishkin Y.V., Kartsev N.M. Current Inverter as Auto-Oscillation Actuator in Applications for Plasma Position Control Systems in the Globus-M/M2 and T-11M Tokamaks. Fusion Engineering and Design. Vol. 143, 2019, pp. 247-258. https://doi.org/10.1016/j.fusengdes.2019.02.105). При этом параллельно катушке управления подключен конденсатор, которые включены в одну диагональ тиристорного или транзисторного моста, а к другой диагонали этого моста подключен источник напряжения. Ключевые элементы моста переключаются попарно-противофазно, что создает коммутацию тока в конденсаторе, а напряжение на индуктивной нагрузке изменяется по треугольному закону. Выбирая соответствующим образом уровни напряжения, при которых происходит переключение инвертора тока, можно изменять среднее на квази-периоде автоколебаний значение напряжения на индуктивности и, следовательно, управлять током в катушке управления и магнитным полем, воздействующим на положение плазмы.
Недостаток данного способа заключается в том, что частота работы инвертора тока изменяется при изменении параметров объекта управления. Это не позволяет синтезировать регуляторы обратной связи на постоянной частоте, что снижает запасы устойчивости замкнутой системы управления. Кроме того, инвертор тока не позволяет обеспечить максимальное быстродействие в системе управления, т.к. не позволяет при отражении возмущений обеспечить подачу максимального напряжения на обмотку горизонтального поля. Реализация способа в аналоге производится аналоговыми техническими средствами, а не цифровыми. При этом инвертор тока генерирует повышенный уровень помех, а для работы инвертора тока используется индуктивный накопитель энергии, а не емкостный, что технически неоправданно для больших токамаков.
Аналоговые технические средства управления в настоящее время проигрывают цифровым системам. Цифровыми системами с компьютерным управлением можно управлять с помощью средств программного обеспечения, добавляя новые функции без замены аппаратных средств. Часто это может быть сделано без участия завода-изготовителя путем простого обновления программного продукта. Подобная функция позволяет быстро адаптироваться к изменяющимся требованиям. Кроме того, возможно применение сложных алгоритмов управления и идентификации (определения модели объекта по входо-выходным сигналам), которые в аналоговых системах невозможны или же осуществимы, но только с очень высокими расходами.
В публикации (Huang H., Zheng X., Wu Y., Sheng Z. Design of high precision and high power bidirectional adjustable power supply. Fusion Engineering and Design 162 (2021) 112103) раскрывается способ управления плазмой, в котором применяется многоуровневое ШИМ-управление (широтно-импульсная модуляция), использующее четыре Н-моста, соединенных последовательно. Основная идея многоуровневого ШИМ-управления состоит в том, что полный диапазон изменения управляющего напряжения разбивается на ряд последовательных поддиапазонов, в каждом из которых производится ШИМ-управление, а поддиапазоны последовательно подключаются друг к другу. Это позволяет повысить точность управления по сравнению с ШИМ изменением полного диапазона управления.
Основным недостатком известного способа является использование аналоговых средств управления, а не цифровых и каскадных, что снижает ширину его области применения в действующих D-образных токамаках и их проектах.
Наиболее близким к заявляемому изобретению по технической сущности является способ импульсного управления положением плазмы в токамаке, в котором для создания напряжения на обмотке магнитного поля применяется релейное исполнительное устройство (Грибов Ю.В., Митришкин Ю.В., Шаховец К.Г. Способ стабилизации положения плазменного шнура в токамаке. А.С. № 1399824), позволяющее реализовать принцип максимального быстродействия путем подачи максимального напряжения на обмотку управления.
Но такой способ импульсного управления положением плазмы имеет недостатки, заключающиеся в том, что система с релейным исполнительным устройством работает в автоколебательном режиме, в котором частота автоколебаний зависит от переменных параметров объекта управления. Кроме того, релейный режим работы системы управления генерирует высокий спектр помех на обмотке управления, которые негативно воздействуют на все диагностики токамака как магнитной системы, а также приводит к потреблению значительной мощности управления.
Раскрытие изобретения
Технической проблемой, решаемой заявляемым изобретением, является необходимость преодоления технических недостатков, присущих аналогам и прототипу, за счет создания импульсного способа управления положением плазмы в D-образном токамаке с использованием многоуровневого широтно-импульсного модулирующего устройства управления последовательным соединением набора Н-мостов, посредством которого формируют напряжение на обмотке управления.
Технический результат, достигаемый при использовании заявляемого изобретения, заключается в повышении точности управления плазмой за счет формирования многоуровневой системы регулирования положения плазмы, что становится возможным, в том числе, при использовании цифровой ШИМ. Таким образом, заявляемое решение обеспечит существенное расширение возможностей управления горизонтальным и вертикальным положением плазмы в D-образном токамаке по увеличению точности управления, стабилизации частоты при многоуровневой широтно-импульсной модуляции, снижения уровня генерации шумов на обмотке управления, снижения уровня потребляемой мощности управления, обеспечения максимального быстродействия.
При вытягивании плазмы в токамаке для повышения давления неизбежно возникает неустойчивость плазмы, что затрудняет управление ей. Задача подавления такой неустойчивости, в общем случае, решается подачей высокого напряжения, однако возможность подачи неограниченного напряжения в реальности отсутствует, в результате чего область управляемости плазмой сильно ограничена. Заявляемое изобретение призвано повысить надежность использования ограниченной области управляемости плазмой за счет использования формирования каскадного управления плазмой с использованием цифровых средств управления (цифровой ШИМ).
Технический результат достигается тем, что в способе импульсного цифрового каскадного управления положением плазмы в D-образном токамаке, включающем изменение магнитного управляющего поля плазмы в соответствии с широтно-импульсным модулированным изменением величины управляющего напряжения, прикладываемого к обмотке управляющего поля и осуществляемого по величине и знаку сигнала управления, формируемого с помощью регулятора внутреннего каскада управления с отрицательной обратной связью по величине сигнала тока в обмотке управляющего поля,
согласно техническому решению,
формируют сигнал управления положением плазмы в токамаке посредством вычитания сигнала положения плазмы из сигнала задающего воздействия,
полученную разность сигналов подают на вход регулятора внешнего каскада управления положением, из выходного сигнала которого вычитают сигнал о токе в обмотке управляющего поля,
полученную после регулятора внешнего каскада разность сигналов направляют на вход регулятора внутреннего каскада управления током, выходной сигнал указанного регулятора подают на вход цифрового многоуровневого широтно-импульсного модулирующего (ШИМ) устройства векторного управления последовательным соединением набора Н-мостов, представляющих собой уровни регулировки, посредством которого формируют необходимое напряжение на обмотке магнитного управляющего поля, при этом сигнал, направляемый на вход ШИМ-устройства, разбивают на поддиапазоны, количество которых равно количеству Н-мостов, а границы поддиапазонов по уровню напряжения являются уровнями ШИМ. Векторный сигнал управления последовательным соединением набора Н-мостов формируют посредством цифрового многоуровневого ШИМ-устройства, при этом сигнал, поступающий на вход ШИМ-устройства модулируют одновременно по ширине импульса напряжения на выходе набора H-мостов и по уровню напряжения, прикладываемого к катушке управления, определяют количество открытых H-мостов и длительность их открытия на каждом периоде широтно-импульсной модуляции, а также знак напряжения на выходе набора H-мостов, при этом ширину импульса для определенного уровня напряжения на каждом периоде многоуровневой ШИМ вычисляют пропорционально величине сигнала на входе устройства, который обрабатывают в цифровом виде, для чего на вход устройства устанавливают аналого-цифровой преобразователь.
Краткое описание чертежей
Изобретение поясняется следующими чертежами, где
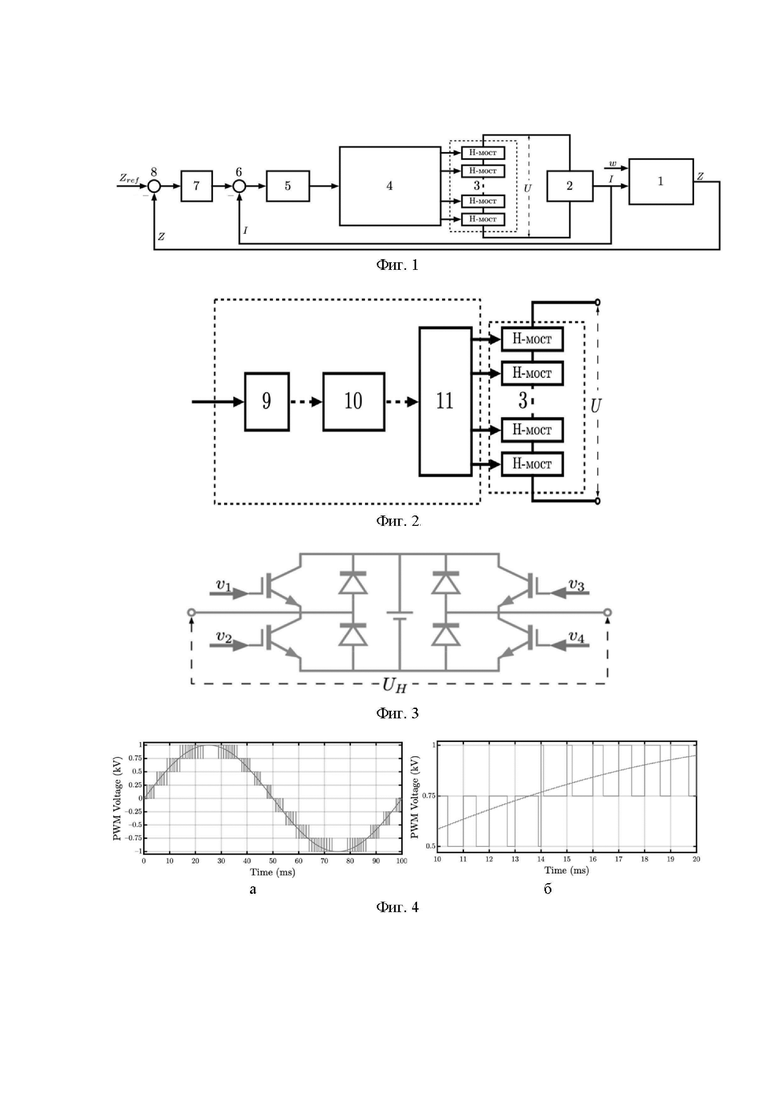
на фиг. 1 представлена структурная схема системы, реализующей заявляемый способ управления положением плазмы в D-образном токамаке;
на фиг. 2 представлено многоуровневое широтно-импульсное модулирующее устройство 4;
на фиг. 3 представлена структурная схема силовой части одного Н-моста на IGBT (Insulated-Gate Bipolar Transistor - Биполярный транзистор с изолированным затвором. См. Дьяконов В. П. и др. Энциклопедия устройств на полевых транзисторах // М.: СОЛОН-Пресс, 2002. — 512 с.) транзисторах, при этом плечи Н-моста работают попарно-противофазно;
на фиг. 4 схематично представлена работа исполнительного устройства для заявляемого способа управления на индуктивную нагрузку при 9-ти уровневом широтно-импульсном исполнительном устройстве, где
а) сплошная линия - вход многоуровневого широтно-импульсного модулирующего устройства 4, умноженного на 1000; кусочно-постоянная линия - выход силовой части Н-моста. Ts = 100 мкс, TPWM = 1 мс, и Umax = 1 кВ,
б) детальный вид на Фиг. 4а, где показаны десять ШИМ-импульсов работы инвертора напряжения в режиме 9-уровневой ШИМ;
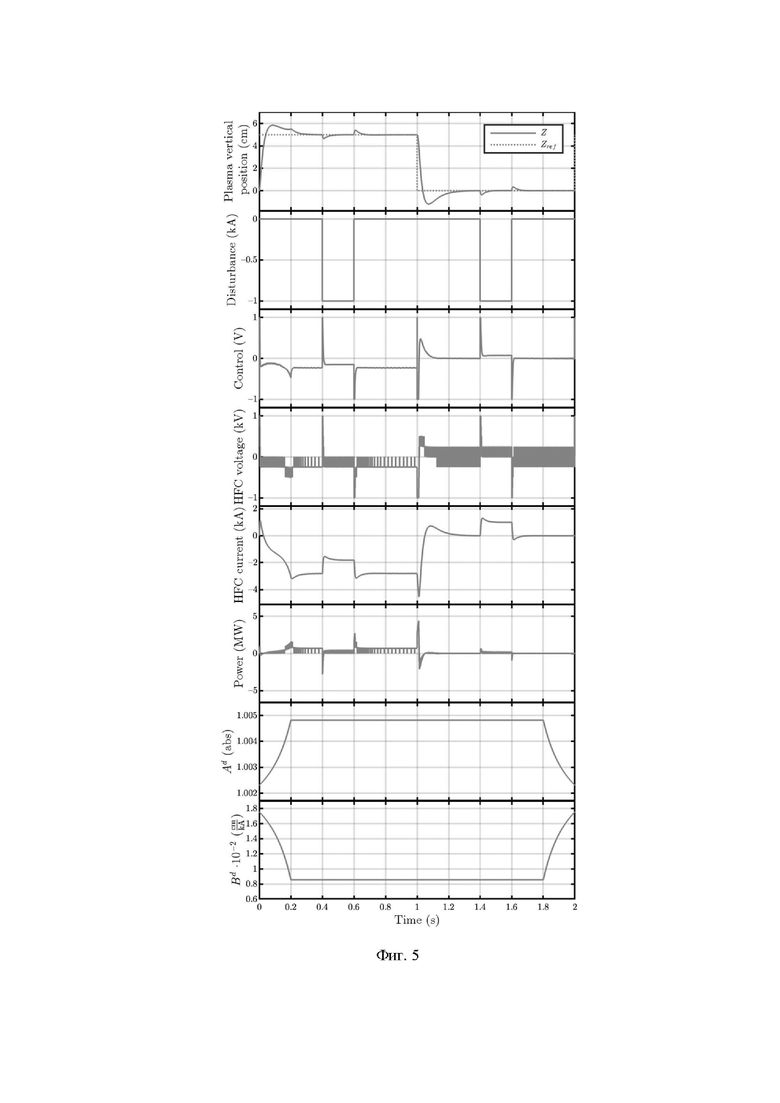
на фиг. 5 в качестве примера конкретного выполнения представлен результат моделирования в реальном времени системы, реализующей способ управления вертикальным положением плазмы в токамаке с использованием инвертора напряжения в 9-уровневом режиме ШИМ;
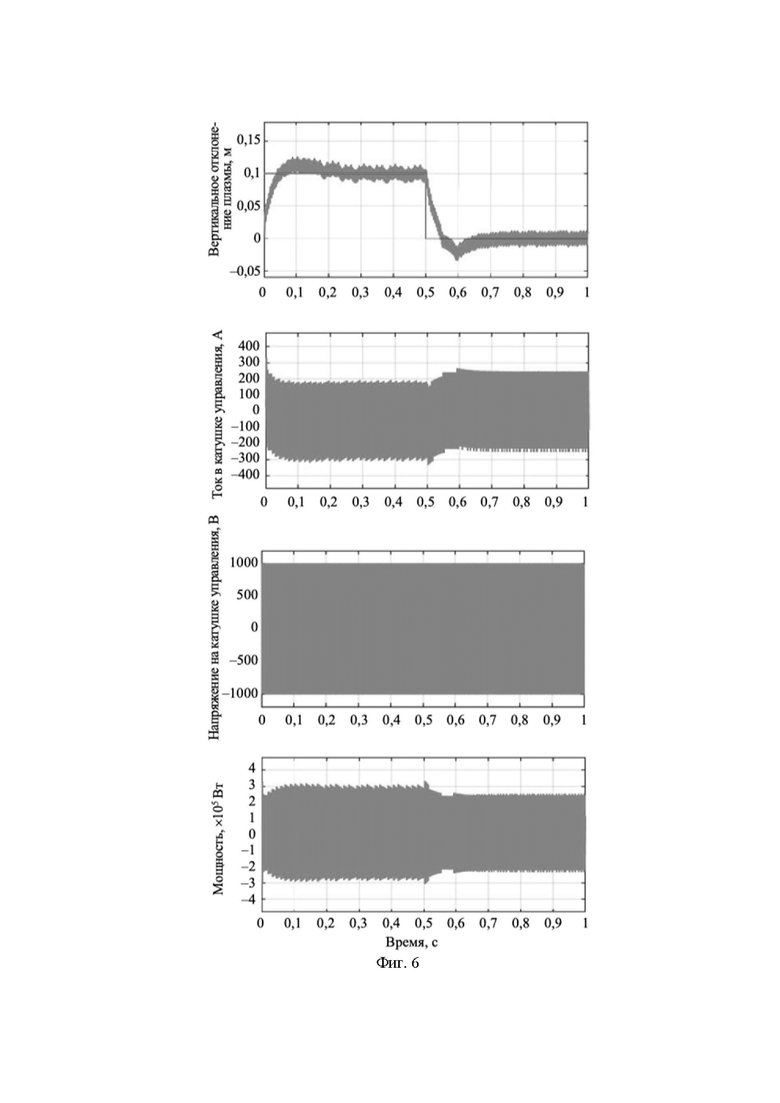
на фиг. 6 представлен результат моделирования в реальном времени релейной системы управления в автоколебательном режиме вертикальным положением плазмы в токамаке;
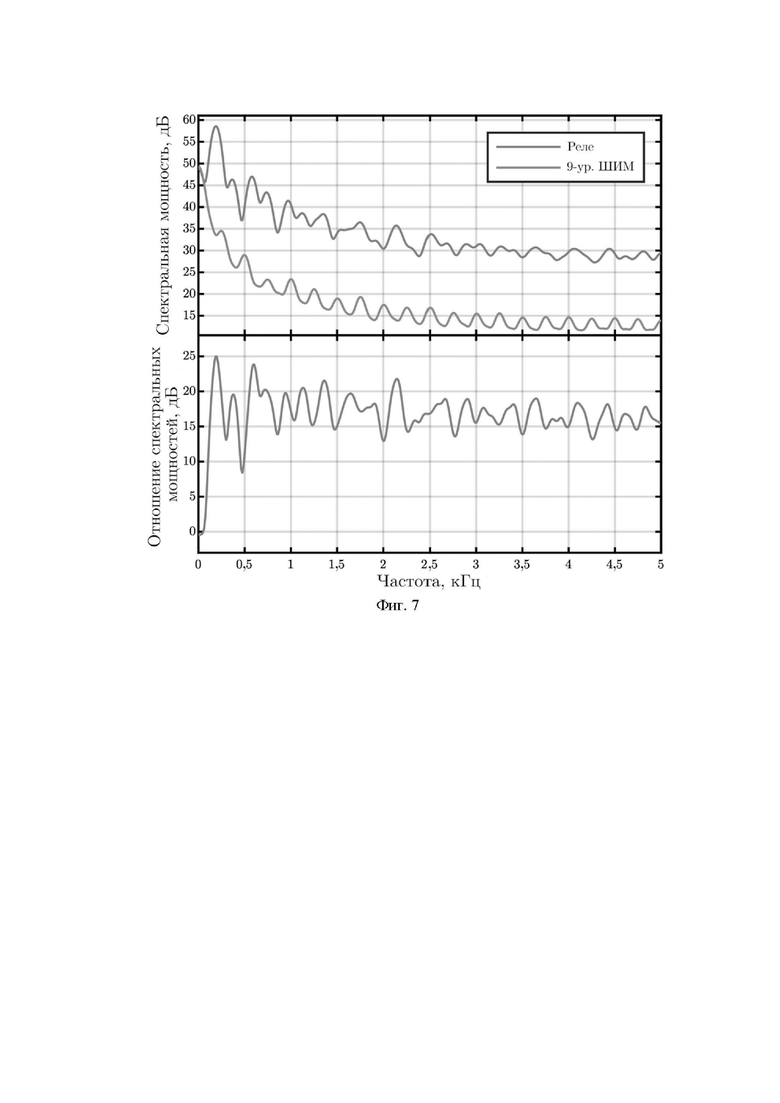
на фиг. 7 показана спектральная мощность напряжения на обмотке управления для обоих источников питания и их отношение.
Позициями на фигурах обозначены:
1 – объект управления (плазма в токамаке),
2 – обмотка управляющего поля,
3 – силовая часть исполнительного устройства на основе выбранного количества Н-мостов, соединенных последовательно,
4 - многоуровневое широтно-импульсное модулирующее устройство,
5 – регулятор внутреннего каскада управления,
6 и 8 – сумматоры,
7 – регулятор внешнего каскада управления,
9 – аналого-цифровой преобразователь,
10 – блок модуляции входного сигнала по ширине импульса и уровню,
11 - блок скоординированного управления Н-мостами.
Осуществление изобретения
Для реализации заявляемого способа последовательно реализуют следующие этапы:
Формируют каскадную замкнутую систему управления положением плазмы в токамаке (1)-(7) (Фиг. 1), для чего:
• обмотку управляющего поля (2) подключают к источнику питания в виде инвертора напряжения, работающего в режиме многоуровневой широтно-импульсной модуляции, состоящего из нескольких последовательно соединенных H-мостов (3) и многоуровневого Широтно-Импульсного Модулирующего (мШИМ) устройства) (4);
• формируют внутренний каскад управления с регулятором тока (5) в обмотке управляющего поля (2), для чего отрицательной обратной связью по величине тока в обмотке управляющего поля (2) с сумматором (6) замыкают обмотку управляющего поля (2);
• формируют внешний каскад управления с регулятором положения плазмы в токамаке (7), для чего отрицательной обратной связью по положению плазмы в токамаке с сумматором (8) замыкают токамак с системой магнитной диагностики, позволяющей вычислять положение плазмы;
Затем осуществляют последовательную настройку регуляторов в сформированной замкнутой системе, для чего:
• получают математическую модель соединенной с источником питания обмотки управляющего поля (2), (3) и (4), т.е. модель последовательного соединения указанных элементов, для чего используют, например, метод идентификации (получение математической модели объекта по входным и выходным данным) из (Mitrishkin Y.V. et al. Tokamak plasma models development for plasma magnetic control systems design by first principle equations and identification approach // Procedia Computer Science. 2021. Vol. 186. P. 466–474), когда на основе набора входных и выходных сигналов строят авторегрессионную модель с внешними входами и находят коэффициенты в её полиномах посредством применения аппарата выпуклой оптимизации;
• настраивают регулятор тока в обмотке управляющего поля (5);
• получают математическую модель движения плазмы в токамаке (1), для чего используют принцип, описанный, например, в (Mitrishkin Yu.V., Kuznetsov E.A. Estimation of parameters of stabilized plasma // Plasma Devices and Operations. 1994. Vol. 2, № 3. P. 277–286);
• настраивают регулятор (7) положения плазмы;
• настройку регуляторов тока в обмотке управляющего поля (5) и положения плазмы (7) выполняют, например, методом линейных матричных неравенств, используя подход из (Mitrishkin Y.V. et al. New horizontal and vertical field coils with optimised location for robust decentralized plasma position control in the IGNITOR tokamak // Fusion Engineering and Design. 2022. Vol. 174. P. 112993.). Для настройки регулятора вычисляют передаточные функции замкнутой системы управления, затем формулируют задачу настройки регулятора в виде задачи на одновременное ограничение H-inf норм (норма в пространстве Харди) этих передаточных функций, которую затем формулируют в виде задачи полуопределенного программирования, которую решают численно и находят параметры регулятора.
При необходимости управления положением плазмы в токамаке на вход регулятора тока в обмотке управления (5) подают сигнал, который является разностью между задающим воздействием на ток и током в обмотке управляющего поля (2).
На вход регулятора положения плазмы в токамаке (7) подают сигнал, являющийся разностью между задающим воздействием на положение плазмы и положением плазмы в токамаке (1).
На вход мШИМ устройства (4) подают аналоговый сигнал с выхода регулятора внутреннего каскада, который оцифровывают посредством аналого-цифрового преобразователя (АЦП) (9) (Фиг. 2). Задают параметры, которые определяют режим работы мШИМ устройства (4):
• количество подключенных Н-мостов;
• максимальное напряжение на выходе последовательного соединения H-мостов;
• период широтно-импульсной модуляции; период дискретизации АЦП.
• максимальное напряжение на входе мШИМ устройства ограничивают в определенном интервале, например ±1 В.
Исходя из заданных параметров, в частности, значения максимального напряжения сигнала на входе в мШИМ устройства (4) и количества подключенных к нему H-мостов, производят разбиение входного сигнала по уровню напряжения на поддиапазоны, которым присваивают порядковые номера. Аналогичное разбиение проводят и для выходного сигнала последовательного соединения H-мостов, границы поддиапазонов при этом являются уровнями ШИМ.
Посредством разбиения полного диапазона выходного сигнала на ограниченное число поддиапазонов уменьшают величину каждого импульса напряжения на входе в обмотке горизонтального управляющего поля, вследствие этого уменьшается колебательность системы управления вертикальным положением плазмы и увеличивается точность управления ее положением. При использовании инвертора напряжения в релейном автоколебательном режиме, где не проводится такое разбиение диапазона выходного сигнала на поддиапазоны, точность управления заметно ниже, что можно наблюдать на Фиг. 6 (См. Митришкин Ю. В., Смирнов И. С., Коньков А. Е. Моделирование цифровой системы управления неустойчивым вертикальным положением плазмы в D-образном токамаке в реальном времени // Вопросы атомной науки и техники. Серия: Термоядерный синтез. 2022. № 1 (45). C. 29–41.).
Оцифрованный сигнал подают на блок (10) мШИМ устройства (Фиг. 2), в котором в начале каждого нового периода ШИМ, исходя из заданных параметров мШИМ устройства (4), проводят вычисление длительности периода ШИМ и порядкового номера поддиапазона напряжения на выходе последовательно соединённых H-мостов (3).
Порядковый номер поддиапазона напряжений определяют посредством сравнения величины входного сигнала с уровнями ШИМ. Длительность периода ШИМ D, выраженную в числе отсчетов задаваемым периодом дискретизации АЦП, определяют по формуле

где  – напряжение сигнала на входе в мШИМ устройства (4),
– напряжение сигнала на входе в мШИМ устройства (4),  – нижняя граница диапазона входного сигнала,
– нижняя граница диапазона входного сигнала,  – порядковый номер диапазона напряжения,
– порядковый номер диапазона напряжения,  – период дискретизации АЦП,
– период дискретизации АЦП,  – период ШИМ,
– период ШИМ,  – число уровней ШИМ,
– число уровней ШИМ,  – число отсчетов в одном периоде ШИМ. Коэффициент заполнения периода ШИМ определяют отношением
– число отсчетов в одном периоде ШИМ. Коэффициент заполнения периода ШИМ определяют отношением  .
.
Длительность текущего периода ШИМ и порядковый номер поддиапазона напряжения на текущем периоде ШИМ подают на блок (11) мШИМ устройства (4) (Фиг. 2), в котором производят генерацию управляющих сигналов и подают их на затворы IGBT транзисторов в H-мостах (3). Каждый H-мост содержит четыре IGBT транзистора (6), и в зависимости от комбинации четырех управляющих сигналов он находится в одном из трех состояний (Фиг. 3):
• прямое напряжение на выходе,
• обратное напряжение на выходе,
• отсутствие напряжения на выходе.
С помощью блока (11) (Фиг. 2) осуществляют скоординированное управление H-мостами (3): определяют номера Н-мостов постоянно открытых на текущем периоде ШИМ, номер H-моста, длительность открытия которого определяется длительностью периода ШИМ и знак выходного напряжения последовательно соединенных Н-мостов (3).
Посредством модуляции сигнала на входе мШИМ устройства (4) (Фиг. 2) в цифровом, а не аналоговом виде обеспечивают:
• высокую помехозащищенность мШИМ модуляции;
• реализацию различных правил округления величины длительности периода ШИМ D, выраженную в числе отсчетов: к большему целому, к меньшему целому или произвольный способ округления;
• реализацию особых правил мШИМ модуляции в случае, когда в начале периода ШИМ величина входного сигнала на входе в мШИМ устройство близка к нулю, предотвращая таким образом увеличение колебательности в системе управления вертикальным положением плазмы;
• изменение параметров мШИМ модуляции посредством перепрограммирования мШИМ устройства, без вмешательства при этом в электрическую схему мШИМ устройства;
• надежное скоординированное управление последовательно соединенными Н-мостами.
В конечном итоге, на вход внешнего каскада управления подают сигнал задающего воздействия на положение плазмы и осуществляют плазменный разряд. В течение плазменного разряда осуществляется автоматическое управление положением плазмы, когда после осуществления переходных процессов величина положения плазмы становится близкой к величине задающего воздействия на положение плазмы.
Пример конкретного выполнения
Перед применением системы управления положением плазмы в реальном эксперименте на токамаке осуществляют её настройку и верификацию, проводя моделирование в реальном времени. На Фиг. 4 а показано моделирование работы инвертора напряжения, состоящего из четырех последовательно соединенных Н-мостов (9 уровней ШИМ) с максимальным напряжением 1000 В, когда на вход мШИМ устройства поступает синусоидальный сигнал с периодом 100 мс и амплитудой 1 В. Кусочно-постоянная линия – напряжение на выходе инвертора напряжения, сплошная линия – сигнал на входе мШИМ устройства, умноженный на 1000. На Фиг. 4 б показано детальное изображение процесса Фиг. 4 а на коротком интервале времени: 10 импульсов напряжения на выходе инвертора с 10 мс до 20 мс.
На Фиг. 5 в качестве примера конкретного выполнения показано моделирование в реальном времени замкнутой каскадной системы, реализующей управление вертикальным положением плазмы при смещении плазмы вверх на 5 см в течение первой секунды плазменного разряда, и удержание плазмы в положении 0 см в течение второй секунды плазменного разряда. На Фиг. 5 приведены следующие сигналы:
• вертикальное смещение плазмы и задающее воздействие на вертикальное смещение плазмы;
• внешнее входное аддитивное возмущение;
• управляющий сигнал на входе в мШИМ устройство;
• напряжение на обмотке горизонтального управляющего поля;
• ток в обмотке горизонтального управляющего поля;
• мощность на обмотке горизонтального управляющего поля;
• изменение во времени параметров модели вертикального движения плазмы в токамаке.
На Фиг. 5 видно, что управление вертикальным положением осуществляется с высокой точностью в режиме мШИМ, поскольку в установившимся режиме вертикальное положение плазмы близко к задающему воздействию на вертикальное положение плазмы. Задающее воздействие - это воздействие, определяемое целью управления, в соответствии с которым должна изменяться управляемая величина. Задающее воздействие, по сути, является желаемым положением плазмы в течение плазменного разряда, оно определяет требуемое положение плазмы в токамаке в каждый момент времени плазменного разряда. Величины задающего воздействия на каждом временном интервале определяют, исходя из выбранного сценария плазменного разряда, который хотят осуществить при проведении физического эксперимента.
Переходный процесс при управлении вертикальным положением плазмы на Фиг. 5 заметно отличается от переходного процесса при управлении вертикальным положением на Фиг. 6, где система работает в релейном автоколебательном режиме, а котором используется на каждом квазипериоде полный диапазон входного напряжения в отличие от мШИМ режима. Таким образом, заявляемый способ обеспечивает более высокую точность управления положением плазмы по сравнению с известными аналогами.
В данном примере помимо сравнения точности работы систем управления вертикальным положением плазмы в токамаке произведено сравнение систем по потребляемой мощности управления и спектру напряжения на обмотке управления.
В таблице 1 представлены четыре интеграла мощности  для обоих источников питания:
для обоих источников питания:
• общий интеграл мощности (энергия)  ,
,
• интеграл модуля мощности  ,
,
• интеграл положительной (активной)  ,
,
• интеграл отрицательной мощности  .
.
Соотношение этих интегралов для двух устройств приведено в таблице ниже. Инвертор напряжения в релейном режиме требует в 2,73 раза больше активной мощности. Кроме того, он требует в 22,75 раза больше отрицательной мощности, которую необходимо вернуть в источник питания или рассеять. Большие значения отрицательной мощности могут стать серьезной проблемой при функционировании источника питания.
, МДж, МДж, МДж, МДж
Таблица 1. Интегралы электрической мощности.
На Фиг. 7 приведены спектральные мощности напряжения на обмотке управления для обоих исполнительных устройств и их отношения. Спектральная мощность Ps(f) была получена с помощью дискретного одностороннего оконного быстрого преобразования Фурье с частотным разрешением 100 Гц (определяет размер окна – величину M) и нулевой спектральной утечкой ( = 40):
= 40):

(Welch, P. (1967). The use of fast Fourier transform for the estimation of power spectra. IEEE Transactions on Audio and Electroacoustics, 15(2), 70–73. doi: 10.1109/TAU.1967.1161901) с окном Кайзера

где I0 – модифицированная функция Бесселя нулевого порядка первого рода, а N число шагов дискретизации.
Спектральная мощность различается в среднем на 17 дБ, то есть в 50 раз. На основании этого можно сделать вывод, что использование инвертора напряжения в релейном режиме создает в 50 раз больше шума и помех в системе магнитной диагностики токамака по сравнению с инвертором напряжения в режиме 9-ти уровневой ШИМ.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ПОСТОЯННОГО НАПРЯЖЕНИЯ В ТРЁХФАЗНОЕ ПЕРЕМЕННОЕ | 2020 |
|
RU2747222C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ С МНОГОУРОВНЕВЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ТАКИМ ПРЕОБРАЗОВАТЕЛЕМ | 2005 |
|
RU2289191C1 |
| СПОСОБ ФОРМИРОВАНИЯ МОДЕЛИ МАГНИТНОГО УПРАВЛЕНИЯ ФОРМОЙ И ТОКОМ ПЛАЗМЫ С ОБРАТНОЙ СВЯЗЬЮ В ТОКАМАКЕ | 2018 |
|
RU2702137C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ | 2016 |
|
RU2620129C1 |
| МНОГОУРОВНЕВЫЙ АВТОНОМНЫЙ ИНВЕРТОР ФАЗНЫХ НАПРЯЖЕНИЙ | 2001 |
|
RU2204880C2 |
| Способ повышения надёжности работы электропривода с многоуровневым инвертором | 2020 |
|
RU2743196C1 |
| Однофазный инвертор напряжения с многофазной широтно-импульсной модуляцией | 2023 |
|
RU2804997C1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2404449C1 |
| ДВУХСТУПЕНЧАТАЯ ЭЛЕКТРОННАЯ НАГРУЗКА | 2009 |
|
RU2404439C1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД | 2012 |
|
RU2520351C1 |
Изобретение относится к способам магнитного управления плазмой в D-образных токамаках (тороидальных камерах с магнитными катушками) с обратной связью. Технический результат – повышение точности и быстродействия, снижение мощности управления, уровня генерируемых помех, поддержание постоянной частоты управления вертикальным положением плазмы в токамаках. D-образные токамаки вытянуты по вертикали для повышения газокинетического давления плазмы, что приводит к неустойчивости плазмы по вертикали. При этом магнитному управлению подвергается неустойчивое вертикальное положение плазмы посредством горизонтального магнитного поля, создаваемого обмоткой горизонтального поля, и горизонтального положения плазмы, посредством вертикального поля. Горизонтальное положение плазмы устойчиво, но подвергается действию расталкивающих сил из-за газокинетического давления плазмы и электродинамических сил, т.к. в плазменном шнуре диаметрально противоположные токи отталкиваются друг от друга. Способ предназначен для управления этим положением, т.е. для стабилизации неустойчивого вертикального положения плазмы, и автоматического перевода его из одного состояния с другое, а также для стабилизации горизонтального положения плазмы с изменением его положения в соответствии с задающим воздействием. 1 з.п. ф-лы, 7 ил., 1 табл.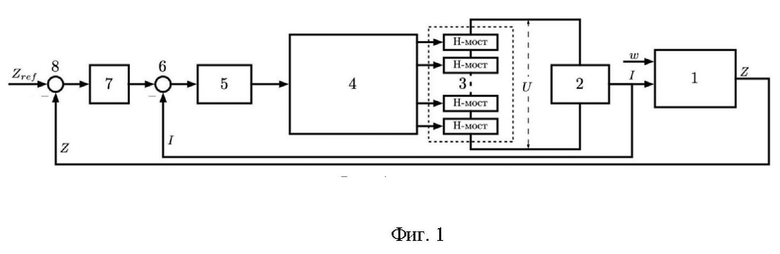
1. Способ импульсного цифрового каскадного управления положением плазмы в D-образном токамаке, включающий изменение тока в обмотке управляющего поля, обеспечивающее оказание воздействия на положение плазмы внутри вакуумной камеры токамака, при этом величину тока в обмотке управляющего поля определяют в соответствии с многоуровневым широтно-импульсным модулированием величины управляющего напряжения, прикладываемого к обмотке управляющего поля и осуществляемого по величине и знаку сигнала управления, формируемого с помощью регулятора внутреннего каскада управления с отрицательной обратной связью по величине тока в обмотке управляющего поля,
отличающийся тем, что
сигнал управления положением плазмы в токамаке формируют посредством вычитания сигнала положения плазмы из сигнала задающего воздействия на положение плазмы,
полученную разность сигналов подают на вход регулятора внешнего каскада управления положением плазмы, из выходного сигнала которого вычитают сигнал, определяющий величину тока в обмотке управляющего поля,
полученную после регулятора внешнего каскада разность сигналов направляют на вход регулятора внутреннего каскада управления током в обмотке управляющего поля, выходной сигнал указанного регулятора подают на вход цифрового многоуровневого широтно-импульсного модулирующего (ШИМ) устройства векторного управления последовательным соединением Н-мостов, представляющих собой уровни модуляции, посредством которого формируют необходимое напряжение на обмотке управляющего поля, при этом сигнал, направляемый на вход ШИМ-устройства, разбивают на поддиапазоны, количество которых определяется числом последовательно соединенных Н-мостов, а границы поддиапазонов по уровню напряжения являются уровнями ШИМ.
2. Способ по п. 1, отличающийся тем, что векторный сигнал управления последовательно соединенными Н-мостами формируют посредством цифрового многоуровневого ШИМ-устройства, при этом сигнал, поступающий на вход ШИМ-устройства, модулируют одновременно по ширине импульса напряжения на выходе набора H-мостов и по уровню напряжения, прикладываемого к обмотке управляющего поля, определяют количество открытых H-мостов и длительность их открытия на каждом периоде широтно-импульсной модуляции, а также знак напряжения на выходе каждого H-моста, при этом ширину импульса для определенного уровня напряжения на каждом периоде многоуровневой ШИМ определяют пропорционально величине сигнала на входе устройства, который обрабатывают в цифровом виде, для чего на вход устройства устанавливают аналого-цифровой преобразователь.
| Способ стабилизации положения плазменного шнура в токамаке | 1985 |
|
SU1399824A1 |
| СПОСОБ ФОРМИРОВАНИЯ МОДЕЛИ МАГНИТНОГО УПРАВЛЕНИЯ ФОРМОЙ И ТОКОМ ПЛАЗМЫ С ОБРАТНОЙ СВЯЗЬЮ В ТОКАМАКЕ | 2018 |
|
RU2702137C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК СПЕКТРАЛЬНЫХ ЛИНИЙ ПЛАЗМЫ В РЕАКТОРЕ-ТОКАМАКЕ | 2016 |
|
RU2633517C1 |
| WO 2012064767 A1, 18.05.2012 | |||
| КАРТРИДЖ ДЛЯ ПЛАЗМЕННОЙ ГОРЕЛКИ С ЖИДКОСТНЫМ ОХЛАЖДЕНИЕМ | 2016 |
|
RU2769402C2 |
| JP 09113671 A, 02.05.1997 | |||
| KUZNETSOV E.A., Current Inverter as Auto-Oscillation Actuator in Applications for Plasma Position Control Systems in the Globus-M/M2 and T-11M Tokamaks | |||
| Fusion Engineering and | |||

