Изобретение относится к области устройств для автоматического определения навигационных координат текущего местоположения наземных транспортных средств, в частности, к барометрическим измерителям высоты над уровнем моря, и может быть применено в навигационно-геодезических системах наземных транспортных средств специального назначения.
Известные барометрические измерители высоты, размещаемые на наземных транспортных средствах, содержат в своем составе, микробарометр, построенный либо на основе струнного датчика атмосферного давления, либо кварцевого пьезорезонансного датчика давления, датчик температуры, вычислительное устройство и устройство отображения навигационной информации (см., например, [1]). В основе их принципа функционирования лежит зависимость атмосферного давления от высоты точки наблюдения.
Выходные сигналы микробарометра и датчика температуры, пропорциональные, соответственно, изменению атмосферного давления и температуры воздуха, поступают в вычислительное устройство, где используются для вычисления приращения высоты между ее значениями в начальном и требуемом пунктах установленного маршрута движения транспортного средства.
Точность получения в таких измерителях информации о приращении высоты, используемой для вычисления в требуемом пункте абсолютного значения высоты над уровнем моря, существенно зависит от ряда факторов, наиболее значимым из которых является изменение атмосферного давления во времени (барометрическая тенденция). Достижение заданной точности определения высоты в известных устройствах обеспечивается компенсацией влияния барометрической тенденции посредством проведения периодических (через 30...40 минут движения) остановок транспортного средства, сопровождаемых серией измерений атмосферного давления и температуры воздуха. Это позволяет определять для каждой остановки барометрическую тенденцию, строить суточный ход атмосферного давления и вводить соответствующую поправку в результат определения атмосферного давления в требуемом пункте установленного маршрута движения (см., например, [2]).
Недостатком данного измерителя, ограничивающим возможность его применения в навигационно-геодезических системах наземных транспортных средств специального назначения, является необходимость проведения продолжительных (до 15…20 минут) остановок для определения барометрической тенденции.
Цель настоящего изобретения - обеспечение заданной точности барометрического измерения высоты над уровнем моря в требуемом пункте установленного маршрута движения транспортного средства без проведения его периодических остановок для определения барометрической тенденции.
Указанная цель достигается тем, что в предлагаемом устройстве в отличие от прототипа дополнительно введен датчик вертикали, выход которого соединен с третьим входом вычислительного устройства, и датчик скорости, выход которого соединен с четвертым входом вычислительного устройства.
Сущность изобретения поясняется чертежом (фиг. 1), где показан барометрический измеритель высоты.
Устройство включает в себя микробарометр 1, выход которого соединен с первым входом вычислительного устройства 3, датчик температуры 2, выход которого соединен со вторым входом вычислительного устройства 3, датчик вертикали 5, выход которого соединен с третьим входом вычислительного устройства 3, и датчик скорости 6, выход которого соединен с четвертым входом вычислительного устройства 3. Выход вычислительного устройства 3 соединен со входом устройства отображения навигационной информации 4.
Устройство работает следующим образом (фиг. 2). Перед началом движения, при нахождении наземного транспортного средства в начальном пункте маршрута, высота Ннпм которого известна и заблаговременно записана в память вычислительного устройства 3, а в процессе движения по установленного маршруту, периодически, с интервалом времени tMP, с помощью датчика вертикали 5, датчика скорости 6, микробарометра 1 и датчика температуры 2, проводится серия измерений продолжительностью tP, соответственно, угла наклона αi продольной оси транспортного средства относительно плоскости горизонта, скорости его движения Vi, атмосферного давления Pi и температуры воздуха Тi.
В каждый ti момент времени рассматриваемой серии измерений с выхода датчика вертикали 5 на третий вход вычислительного устройства 3 подается сигнал, который содержит информацию об угле наклона αi, а с выхода датчика скорости 6 на четвертый вход вычислительного устройства 3 подается сигнал, содержащий информацию о скорости движения Vi транспортного средства.
По полученным значениям αi и Vi в вычислительном устройстве 3 рассчитываются приращения высоты hi точки текущего местоположения транспортного средства относительно точки начала серии измерений по формуле:
где n - количество циклов измерения информации, проведенное в серии измерений. Одновременно, в каждый ti момент времени серии измерений с выхода микробарометра 1 на первый вход вычислительного устройства 3 подается сигнал, который содержит информацию об атмосферном давлении Рi, а с выхода датчика температуры 2 на второй вход вычислительного устройства 3 подается сигнал, содержащий информацию о температуре воздуха Ti.
По полученным значениям Рi и Ti в вычислительном устройстве 3 для каждого ti момента времени рассчитывается величина ΔРi изменения атмосферного давления относительно его значения в первом измерении, обусловленная влиянием барометрической тенденции, по формуле:

где  - значение приращения атмосферного давления, полученное в i-ом измерении (Рi), относительно его значения в первом измерении (P1) в данной серии;
- значение приращения атмосферного давления, полученное в i-ом измерении (Рi), относительно его значения в первом измерении (P1) в данной серии;
Ei - величина барометрической ступени высоты, соответствующая приращению ΔРi.
Значения барометрических ступеней высот Ei, известные в виде таблиц, заблаговременно записываются в память вычислительного устройства 3 в функции Pcpi и Tcpi, где
Полученный в результате проведения за время tP серии измерений ряд значений ΔР1, ΔР2, ΔР3, …, ΔРn изменений атмосферного давления, обусловленных барометрической тенденцией, используется в вычислительном устройстве 3 в процедуре прогнозирования, предусматривающей построение на основе соответствующих аппроксимирующих функций (например, с использованием метода наименьших квадратов) прогностической модели и экстраполяцию значений ΔРi на последующем интервале времени tMP движения транспортного средства по установленного маршруту. Полученное в результате прогнозирования на момент окончания интервала времени tMP значение ΔPj(tП) характеризует изменение атмосферного давления, обусловленное влиянием барометрической тенденции, за время tП=tP+tMP.
В течение всего времени tДВ движения наземного транспортного средства от начального до требуемого пункта установленного маршрута проводятся m серий измерений и определяются m значений приращений атмосферного давления ΔPj(tП) (фиг. 3), по которым в вычислительном устройстве 3 рассчитывается поправка ΔРБТ, характеризующая изменение атмосферного давления, обусловленного влиянием барометрической тенденции, за все время движения от начального пункта маршрута до требуемого пункта:
Полученное значение поправки ΔРБТ вычитается из результата Ртпм измерения с помощью микробарометра 1 атмосферного давления в требуемом пункте маршрута:

«Свободное» от влияния барометрической тенденции значение  атмосферного давления используется в вычислительном устройстве 3 для расчета абсолютного значения Нтпм высоты над уровнем моря в требуемом пункте установленного маршрута движения транспортного средства:
атмосферного давления используется в вычислительном устройстве 3 для расчета абсолютного значения Нтпм высоты над уровнем моря в требуемом пункте установленного маршрута движения транспортного средства:

где РНПм - значение атмосферного давления, измеренного в начальном пункте маршрута;
Етпм - величина барометрической ступени высоты, соответствующая
приращению ΔРТПМ.
Значение барометрической ступени высоты Етпм, выбирается из таблиц, заблаговременно записанных в память вычислительного устройства 3, в соответствии с величинами

где Тнпм - значение температуры воздуха, измеренной датчиком температуры 2 в начальном пункте маршрута;
Ттпм - значение температуры воздуха, измеренной датчиком температуры 2 в требуемом пункте маршрута.
С выхода вычислительного устройства 3 сигнал, несущий информацию о значении высоты Нтпм, поступает на вход устройства отображения навигационной информации 4.
Значения интервалов времени tР и tMP устанавливаются по результатам испытаний датчиков вертикали и скорости исходя из их точностных возможностей по обеспечению приемлемой достоверности определения величины барометрической тенденции ΔPj(tП).
Заявляемое устройство обеспечивает компенсацию влияния изменения атмосферного давления во времени (барометрической тенденции) на результаты барометрических измерений без проведения периодических остановок наземного транспортного средства во время его движения по установленного маршруту. Тем самым, достигается заданная точность барометрического определения высоты над уровнем моря в требуемом пункте установленного маршрута движения транспортного средства. Применение заявляемого устройства также способствует уменьшению, за счет исключения необходимости проведения остановок для определения барометрической тенденции, времени, затрачиваемому транспортным средством на прохождение установленного маршрута.
Аналоги:
- Дементьев В.Е. «Современная геодезическая техника и ее применение». Тверь, ООО 141 111 «Ален», 2006 г., стр. 229…232 (прототип);
- Прихода А.Г. «Барометрическое нивелирование». М., Недра, 1964 г., стр. 86…89.
| название | год | авторы | номер документа |
|---|---|---|---|
| АЭРОГРАВИМЕТРИЧЕСКИЙ КОМПЛЕКС | 1996 |
|
RU2090911C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| СПОСОБ БАРОМЕТРИЧЕСКОГО ОПРЕДЕЛЕНИЯ ВЫСОТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2213936C1 |
| ПИЛОТАЖНО-НАВИГАЦИОННАЯ СИСТЕМА ТРАНСПОРТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2597814C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2023 |
|
RU2801013C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2022 |
|
RU2773981C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2017 |
|
RU2685572C2 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2020 |
|
RU2749214C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2830721C1 |
Изобретение относится к устройствам для измерения высоты над уровнем моря и может быть использовано для измерения высоты наземного транспортного средства. Сущность: устройство содержит микробарометр (1), датчик (2) температуры, датчик (5) вертикали, датчик (6) скорости. Выходы указанных датчиков соединены со входом вычислительного устройства (3), выход которого соединен со входом устройства (4) отображения навигационной информации. Технический результат: обеспечение заданной точности барометрического измерения высоты над уровнем моря в требуемом пункте установленного маршрута движения транспортного средства без проведения его периодических остановок для определения барометрической тенденции. 3 ил.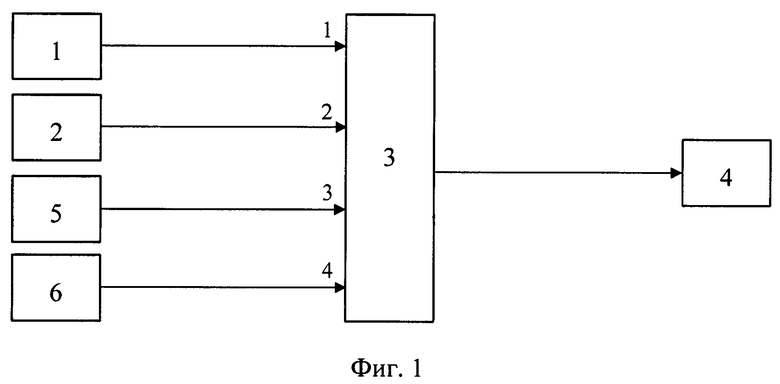
Барометрический измеритель высоты, содержащий микробарометр, датчик температуры, вычислительное устройство и устройство отображения навигационной информации, причем выход микробарометра соединен с первым входом вычислительного устройства, со вторым входом которого соединен выход датчика температуры, выход вычислительного устройства соединен со входом устройства отображения навигационной информации, отличающийся тем, что с целью обеспечения заданной точности барометрического измерения высоты над уровнем моря в требуемом пункте установленного маршрута движения транспортного средства без проведения его периодических остановок для определения барометрической тенденции в него дополнительно введен датчик вертикали, выход которого соединен с третьим входом вычислительного устройства, и датчик скорости, выход которого соединен с четвертым входом вычислительного устройства.
| JPH 09159447 А, 20.06.1997 | |||
| WO 2019227112 А1, 05.12.2019 | |||
| EP 2988095 А1, 24.02.2016 | |||
| СПОСОБ БАРОМЕТРИЧЕСКОГО ОПРЕДЕЛЕНИЯ ВЫСОТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2213936C1 |

