Область техники, к которой относится изобретение
Данное изобретение относится к способам защиты элементов системы трансмиссии, в частности, в автотранспортном средстве.
Обычно система трансмиссии для передачи механической мощности содержит сцепление, соединяющее первую кинематическую цепь, которая предназначена быть ведущей, например, благодаря источнику механической мощности, такому как тепловой двигатель, со второй кинематической цепью, которая предназначена для потребления механической мощности, например, содержит коробку передач, соединенную с ведущими колесами автотранспортного средства.
Однако в некоторых ситуациях использования системы трансмиссии первая кинематическая цепь может оказаться не способной обеспечивать свою приводную роль.
Эти ситуации использования являются исключительными ситуациями использования.
Примером исключительной ситуации использования является разрядка электрической батареи транспортного средства ниже минимального уровня заряда, необходимого для запуска двигателя.
В этом случае система запуска, предусмотренная на транспортном средстве, не может запустить двигатель. Обычно водитель производит запуск «с толкача», толкая транспортное средство на склоне или буксируя его при помощи другого транспортного средства. Таким образом, запуск двигателя форсируют от кинетической энергии, накопленной транспортным средством во время своего движения, передавая ее от колес на двигатель, то есть от второй кинематической цепи на первую. Однако такая стратегия подвергает систему трансмиссии многим ошибкам, так как в этом случае не поддается контролю ни один из параметров запуска автотранспортного средства. В частности, оператор рискует включить ненадлежащую передачу, отпустить сцепление слишком быстро, сообщить слишком много кинетической энергии транспортному средству, в частности, во время его ускорения на склоне.
На скорости транспортного средства толчки и удары передаются в систему трансмиссии во время передачи крутящего момента при замыкании сцепления. Ненадлежащая стратегия запуска приводит к преждевременному износу и разрушению элементов, связанных с кинематическими цепями, и, соответственно, любого элемента системы трансмиссии транспортного средства, в частности, сцепления, подвесок, трансмиссионных валов.
Уровень техники
Известны способы защиты для автоматических коробок передач, которые содержат сцепление, управляемое устройством управления, и оснащены устройством контроля, чтобы ограничивать, в частности, в исключительной ситуации, развиваемый крутящий момент в зависимости от порога, установленного для предохранения системы трансмиссии.
Однако системы трансмиссии, оснащенные сцеплением с механическим, полуавтоматическим или роботизированным приводом, не имеют средств контроля, способных оценивать ситуацию использования и связывать с ней быстрый предиктивный метод защиты.
Раскрытие сущности изобретения
Задача изобретения состоит а преодолении недостатков, связанных со сцеплением с механическим, полуавтоматическим или роботизированным приводом, в частности, путем регулирования скорости транспортного средства, чтобы уменьшить крутящий момент или скорость вращения на входе сцепления во время исключительных ситуаций использования и предиктивно с целью предупреждения разрушения или износа элементов системы трансмиссии, корректируя максимальное значение крутящего момента, передаваемого через систему в момент замыкания сцепления.
В связи с вышеизложенным, объектом изобретения является способ передачи крутящего момента через систему трансмиссии транспортного средства, содержащую сцепление, расположенное между первой кинематической цепью и второй кинематической цепью, в котором определяют ситуацию использования транспортного средства при разомкнутом состоянии сцепления, сравнивая по меньшей мере первую переменную состояния системы трансмиссии по меньшей мере с одним порогом обнаружения, и регулируют вторую переменную состояния второй кинематической цепи таким образом, чтобы вторая переменная состояния была меньше или равной значению ограничения в зависимости от результата сравнения.
Предпочтительно первая кинематическая цепь содержит силовую установку.
Предпочтительно первая переменная состояния содержит режим силовой установки. Ситуацию использования определяют, когда режим двигателя ниже порога обнаружения, содержащего минимальное значение режима двигателя.
Согласно варианту осуществления, регулируют вторую переменную состояния посредством торможения, применяемого к компоненту второй кинематической цепи.
В варианте осуществления регулируют скорость второй кинематической цепи, если она может выдавать в первую кинематическую цепь действительный динамический крутящий момент, превышающий порог обнаружения, содержащий значение крутящего момента обнаружения, при этом первая переменная состояния содержит действительный динамический крутящий момент, посредством замыкания сцепления с передачей, включенной в коробке передач, соединенной с второй кинематической цепью.
Предпочтительно вычисляют значение действительного динамического крутящего момента, создаваемого при приведении в действие второй кинематической цепи, и значение инерции первой кинематической цепи, умноженное на производную, в зависимости от времени, фрикционного крутящего момента на сцеплении, определяют значение ограничения, умножая максимальное допустимое значение действительного динамического крутящего момента, извлеченное из картографии в зависимости от измеренной скорости транспортного средства, на коэффициент безопасности, и вычисляют производную действительного динамического крутящего момента в зависимости от времени.
Первая переменная состояния может дополнительно содержать выбранную передачу, при этом транспортное средство можно затормозить, если выбрана передача заднего хода.
Предпочтительно сцепление содержит средства регулирования замыкания сцепления, и регулирование второй переменной состояния сопровождается постепенным замыканием сцепления.
Предпочтительно первая переменная состояния содержит угол наклона транспортного средства относительно горизонтальной плоскости, при этом указанный угол сравнивают с порогом обнаружения угла наклона.
Объектом изобретения является также способ, в котором первая переменная состояния содержит состояние износа, связываемое со сцеплением путем вычисления, когда сцепление замкнуто, абсолютного значения разности скоростей вращения первой и второй кинематических цепей и последующего сравнения указанной разности с порогом проскальзывания в течение заранее определенного времени.
Краткое описание чертежей
Изобретение будет более понятно из подробного описания нескольких вариантов осуществления, представленных в качестве неограничивающих примеров и проиллюстрированных прилагаемыми чертежами, на которых:
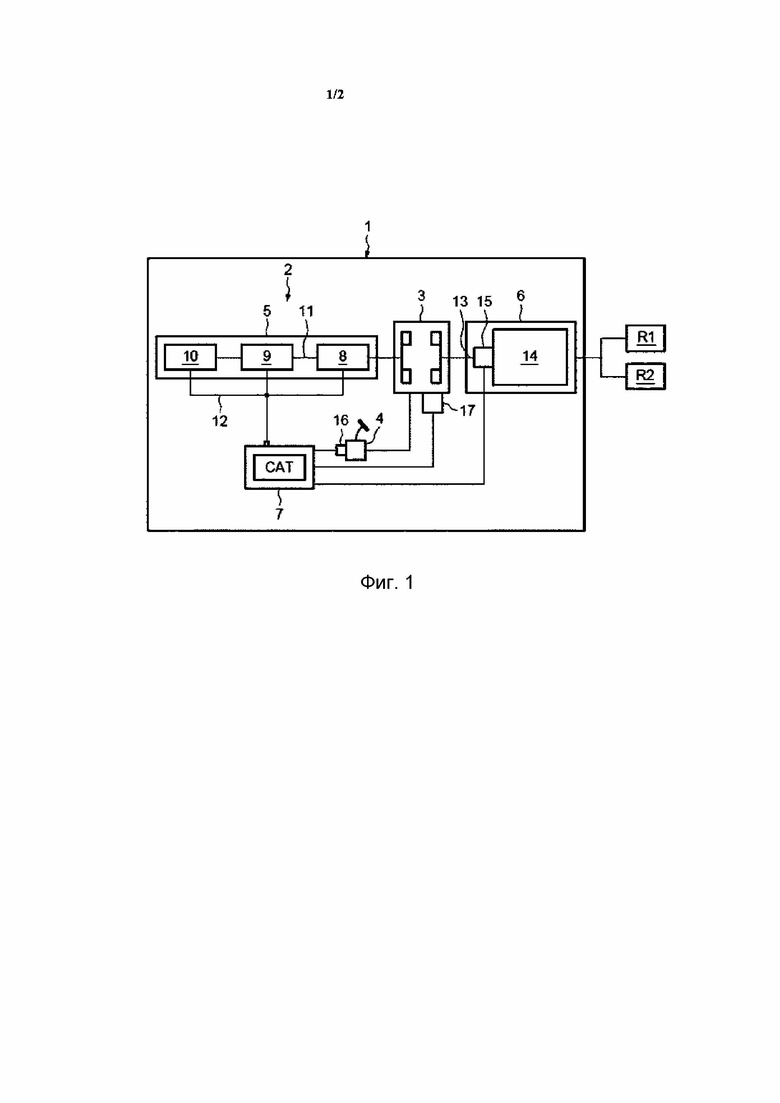
на фиг. 1 представлена схема автотранспортного средства, содержащего силовую систему трансмиссии в соответствии с изобретением;
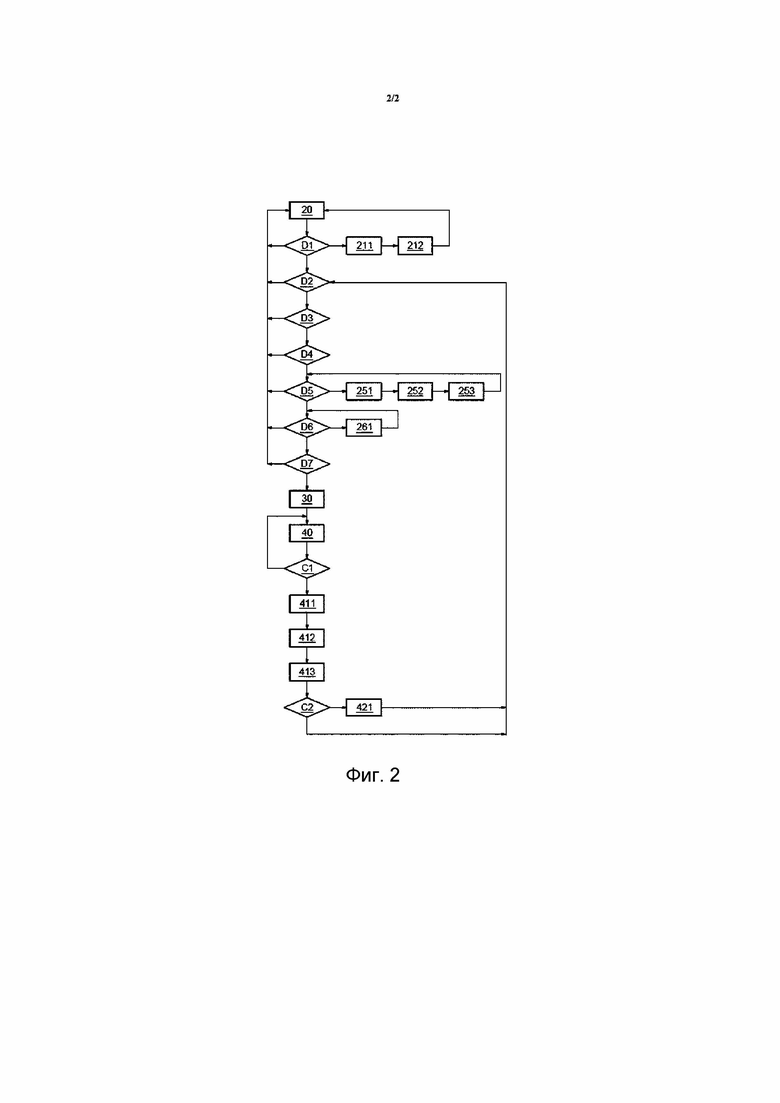
на фиг. 2 приведен пример применения устройства передачи крутящего момента в соответствии с изобретением.
Осуществление изобретения
На фиг. 1 показано автотранспортное средство 1, содержащее силовую систему 2 трансмиссии, включающую в себя сцепление 3.
В первом варианте осуществления сцеплением 3 управляет оператор через интерфейс человек-машина, например, через педаль 4 сцепления.
Во втором варианте осуществления сцеплением 3 управляет роботизированная или полуавтоматическая система управления.
Силовая система 2 трансмиссии содержит первую кинематическую цепь 5 и вторую кинематическую цепь 6, которые могут выдавать или потреблять механическую мощность, и электронный блок 7 контроля.
Электронный блок 7 контроля устанавливает соединение между датчиками физического измерения и сетями связи между системами дистанционно или непосредственно. Он может представлять собой вычислительное устройство 7, выполненное на базе автомобильного вычислительного устройства, содержащего процессор.
Первая кинематическая цепь 5 включает в себя двигатель 8, например, тепловой двигатель 8, элементы 9 трансмиссии и вспомогательные агрегаты 10, соединенные с первым трансмиссионным валом 11.
Вспомогательные агрегаты 10 могут включать в себя компрессор кондиционирования и генератор переменного тока. Элементы и вспомогательные агрегаты 10 можно переключать таким образом, чтобы приводить их в действие от первого трансмиссионного вала 11.
Элементы 9 трансмиссии включают в себя коленчатый вал и, в частности, различные элементы кинематической трансмиссии с понижающими передаточными отношениями, такие как ременные или зубчатые передачи. Они передают через первый трансмиссионный вал 11 крутящий момент от двигателя 8, когда он работает, или от колес R1, R2, когда он выключен.
Разумеется, первая кинематическая цепь 5 может включать в себя один или несколько элементов, выполняющих роль элементов 9 трансмиссии.
Вычислительное устройство 7 управляет двигателем 8 через шину 12.
Элементы, установленные на первом трансмиссионном валу 11, включают в себя элементы 9 трансмиссии, вспомогательные агрегаты 10 и двигатель 8. Моменты инерции этих элементов по отношению к первому трансмиссионному валу 11 записаны в вычислительном устройстве 7, при этом вычислительное устройство 7 определяет момент инерции первой кинематической цепи 5 в зависимости от состояния переключения элементов 9 трансмиссии, чтобы определять действительный динамический крутящий момент, равный сумме действительного динамического крутящего момента и значения инерции первой кинематической цепи, умноженного на производную режима двигателя 8 в зависимости от времени.
Шина 12 связи соединена с другими органами транспортного средства 1 таким образом, чтобы вычислительное устройство 7 могло получать информацию о скорости транспортного средства 1 и состоянии коробки 14 передач, связанном с включением передачи в коробке.
Шина 12 связи является, например, шиной CAN.
Вторая кинематическая цепь 6 передачи механической мощности включает в себя устройство потребления механической мощности, установленное на втором трансмиссионном валу 13.
Это устройство потребления механической мощности включает в себя коробку 14 передач, вращающую колеса R1, R2 транспортного средства 1.
В первом варианте осуществления коробка 14 передач является механической.
Во втором варианте осуществления коробка 14 передач является роботизированной или полуавтоматической.
На втором трансмиссионном валу 13 установлен датчик 15 скорости вращения, который измеряет и передает скорость вращения указанного вала в вычислительное устройство 7.
Первый трансмиссионный вал 11 первой кинематической цепи 5 соединен со входом сцепления 3, а второй трансмиссионный вал 13 второй кинематической цепи 6 соединен с выходом сцепления 3, при этом, когда сцепление находится в замкнутом положении, создаваемая двигателем 8 механическая мощность передается на коробку 14 передач.
Датчик 16 положения педали 4 сцепления передает в вычислительное устройство 7 положение педали 4.
Если значение положения, определенное датчиком 16, превышает порог замыкания, вычислительное устройство 7 считает, что сцепление 3 разомкнуто. В противном случае сцепление 3 считается замкнутым.
Порог замыкания определяют эмпирически в зависимости от типа сцепления 3.
В ситуации использования двигатель 8 может быть выключен, а транспортное средство продолжает движение. При этом колеса R1, R2 передают от второй кинематической цепи 6 кинетическую энергию и инерционный момент, связанный с режимом вращения первой кинематической цепи 5 и с составляющей инерции каждого элемента трансмиссионного вала 11, выдающего крутящий момент, который станет действительным при замыкании сцепления 3. При замыкании сцепления 3 распространяется ударный момент, объединяя крутящий момент, производимый от вращения колес R1, R2, и инерционный крутящий момент.
Кинетическая энергия, приобретенная транспортным средством 1, преобразуется в исключительно большой ударный момент через вторую кинематическую цепь 6 во время неконтролируемого замыкания сцепления 3, если скорость транспортного средства 1 является высокой и если сцепление является механическим, так как недостаточно плавное соединение через сцепление 3 передает энергию за очень короткое время. Если скорость транспортного средства 1 является очень высокой, слишком быстрое замыкание может, например, привести к кручению или к разрушению элементов кинематических цепей, опор силовой установки, тяг передачи крутящего момента или механической распределительной системы (ремень, натяжное устройство, цепь…).
В другом случае, наоборот, чем больше время сжатия (или замыкания) сцепления 3, тем меньше инерционный крутящий момент. Следовательно, передаваемый крутящий момент будет определяться в зависимости от допустимых пределов системы 2 трансмиссии.
В первом варианте осуществления в случае механической коробки 14 замыканием сцепления 3 управляют вручную. В исключительной ситуации водитель может случайно отпустить педаль 4 сцепления. В этом случае замыкание системы трансмиссии происходит примерно за сто миллисекунд, и подача крутящего момента колесами R1, R2 от второй кинематической цепи на первую кинематическую цепь порождает ударный момент, который может вызвать разрушения, если скорость транспортного средства 1 является слишком высокой, а также может привести к резкому и неконтролируемому торможению, которое может стать опасным для оператора.
Во втором варианте осуществления в случае полуавтоматической или роботизированной коробки 14 передач замыкание сцепления 3, которым управляет, например, вычислительное устройство 7, не зависит от водителя, что позволяет обеспечивать постепенность.
Силовая система 2 трансмиссии дополнительно содержит по меньшей мере один датчик 17 износа, измеряющий параметр износа элемента системы 2 трансмиссии, который может стать самым уязвимым элементом системы по причине износа. Например, датчик 17 износа измеряет температуру фрикционного покрытия фрикционных дисков сцепления 3. В этом случае датчик 17 износа содержит работающий дистанционно температурный зонд внутри фрикционного покрытия.
Элементы кинематической цепи и вспомогательные агрегаты имеют реально допустимый крутящий момент, сверх которого по меньшей мере один из них, то есть наиболее уязвимый элемент, разрушается под действием ударного момента.
Максимальное значение передаваемого крутящего момента либо само по себе известно из конфигурации элементов системы 2 трансмиссии, либо его регулярно определяет вычислительное устройство 7, когда сцепление 3 разомкнуто, и в зависимости от состояния износа элементов системы 2 трансмиссии.
Вычислительное устройство 7 содержит картографию «Крутящий момент компонентов» САТ, в которой занесен максимальный случайный ударный момент, допустимый для системы 2 трансмиссии. Картография связывает максимальное значение крутящего момента, который может передаваться в систему 2 трансмиссии при замыкании сцепления 3, с данной скоростью и может изменять значения картографии САТ.
Двигатель 8 и элементы 9 трансмиссии сообщаются с вычислительным устройством 7 через шину 12 связи, поэтому вычислительное устройство 7 знает создаваемый двигателем 8 действительный динамический крутящий момент, режим двигателя 8 и максимальный допустимый ударный момент.
Вычислительное устройство 7, датчик 15 скорости, датчик 16 положения и датчик 17 износа включены в устройство передачи крутящего момента через силовую систему трансмиссии таким образом, что вычислительное устройство 7 определяет тип ситуации использования силовой системы 2 трансмиссии в зависимости от состояния транспортного средства 1 и посредством сравнения по меньшей мере первой переменной состояния системы 2 трансмиссии, в частности, первой кинематической цепи 5, по меньшей мере с одним порогом обнаружения, при этом вычислительное устройство 7 регулирует вторую переменную состояния второй кинематической цепи 6 таким образом, чтобы вторая переменная состояния была меньше или равна заранее определенному значению, зависящему от скорости транспортного средства 1.
Порог или пороги обнаружения записаны в вычислительном устройстве 7.
Транспортное средство 1 находится либо в нормальном состоянии, либо в состоянии исключительной ситуации использования. В зависимости от того, находится или нет транспортное средство 1 в исключительной ситуации использования, заранее определенное значение извлекают из картографии САТ или оно является фиксированным значением, сохраненным в вычислительном устройстве 7.
Речь может идти о любом устройстве, которое может устанавливать связь с двигателем 8, с элементами 9 трансмиссии и вспомогательными агрегатами 10, с датчиком 15 скорости, датчиком 16 положения и датчиком 17 износа.
Кроме того, устройство выполнено с возможностью сохранять и вычислять значения инерции, вычислять действительный динамический крутящий момент, может сохранять и изменять картографию САТ для определения типа исключительной ситуации использования силовой системы трансмиссии в зависимости от состояния сцепления 3, сравнивая по меньшей мере первую переменную состояния системы 2 трансмиссии, например, первой кинематической цепи 5, по меньшей мере с одним порогом обнаружения.
Кроме того, указанное устройство выполнено с возможностью регулировать вторую переменную состояния первой кинематической цепи 5 таким образом, чтобы вторая переменная состояния второй кинематической цепи 6 была меньше или равна заранее определенному значению, зависящему от характера и, возможно, от износа затрагиваемых механических элементов, составляющих систему 2 трансмиссии. Характер и поведение при износе механических элементов, затрагиваемых при замыкании системы 2 трансмиссии, известны при проектировании транспортного средства 1. Например, для каждого элемента максимальный допустимый случайный ударный момент известен из опыта специалиста в данной области и в соответствии с моделями цифрового проектирования.
На фиг. 2 представлен пример применения устройства передачи крутящего момента.
Это применение может начаться с этапа 20, на котором считается, что транспортное средство 1 находится в ситуации использования, которую можно рассматривать как обычную. В этом случае устройство передачи выбирает так называемую нормальную стратегию использования, при которой транспортное средство 1 может быть припарковано или может находиться в движении с включенным или выключенным двигателем. Если сцепление разомкнуто, вторая кинематическая цепь 6 не получает механической мощности от двигателя 8. Динамический крутящий момент, поступающий на вход сцепления, равен сумме крутящего момента, выдаваемого двигателем 8, и инерционного крутящего момента элементов 8, 9, 10, 11, соединенных с первой кинематической цепью.
Устройство передачи крутящего момента может быть выполнено с возможностью обнаруживать в ходе этапов D1-D7 ситуацию использования силовой системы 2 трансмиссии, которая может считаться исключительной типа «запуска с толкача».
На этапе 30 вычисляют переменные состояния, позволяющие проверить, что крутящий момент, проходящий через второй трансмиссионный вал 13, не превышает крутящий момент, допустимый для элементов системы 2 трансмиссии.
Этап 40 позволяет сравнить параметры, вычисленные на этапе 30, с заранее определенными порогами защиты.
На этапах 411, 412, 413, 421 применяют стратегию защиты системы 2 трансмиссии.
Первая переменная состояния содержит действительный динамический крутящий момент, а вторая переменная состояния содержит скорость транспортного средства 1.
Во время этапов D1-D7, когда устройство осуществляет обнаружение исключительной ситуации использования силовой системы 2 трансмиссии, вычислительное устройство 7 может определить, например, во время первого этапа D1, все ли датчики 15, 16, 17 транспортного средства 1, которые могут понадобиться, работают. В этом случае после этапа D1 осуществляют этап D2.
В случае обнаруженной неисправности (этап D1) одного из затрагиваемых датчиков 15, 16, 17 на этапе 211 вводится аварийный режим.
Аварийный режим на этапе 211 приводит к передаче информации, такой как вывод сигнала ошибки на приборную панель транспортного средства 1 (этап 212).
Этап 212 возвращается на этап 20. Таким образом, аварийный режим приводит к выходу из стратегии. Если один из датчиков неисправен, оператор не получает помощи при любой ситуации использования системы 2 трансмиссии.
Первый этап обнаружения D1 повторяется через равномерные промежутки времени, например, через каждые десять миллисекунд.
На этапе D2 проверяют, что двигатель 8 остановлен или находится ниже порога режима вращения. Если это так, этап D2 продолжают этапом D3, в противном случае возвращаются на этап 20.
На этапе D3 при помощи датчика 17 контролируют значение переменной состояния, представляющей собой наклон транспортного средства 1. Например, акселерометр 17 измеряет и сравнивает наклон транспортного средства 1 относительно порогового угла, рассматриваемого относительно горизонтальной плоскости.
В варианте осуществления пороговый угол можно зафиксировать по существу равным нулю градусов угла, если стратегию желают применить даже без наклона транспортного средства 1, например, если аварийное транспортное средство 1 буксируют при помощи другого транспортного средства 1 на ровной дороге.
Предпочтительно пороговый угол можно определить по существу в пять градусов. Если транспортное средство 1 наклоняется больше порогового угла, считают, что оно находится на склоне в достаточной степени, и стратегию продолжают этапом D4, в противном случае возвращаются на этап 20.
На этапе D4 можно проверить ориентацию транспортного средства 1 по отношению к направлению склона при помощи датчика 17 с акселерометром. Если передняя часть транспортного средства 1 направлена в сторону спуска, этап D4 продолжают этапом D5, в противном случае возвращаются на этап 20.
На этапе D5 проверяют, включена ли передача и является ли сцепление 3 разомкнутым или замкнутым. Если оператор выбрал передачу переднего хода, например, третью передачу коробки 14 передач, и выжимает сцепление 3, этап D5 продолжается этапом D6.
Если же сцепление 3 замкнуто, например, при отпускании педали 4 сцепления, этап D5 возвращается на этап 20.
Если, кроме того, в коробке 14 передач выбрана передача, соответствующая заднему ходу, этап D5 продолжается этапом 251.
На этапе 251 передают тревожное сообщение, например, на дисплей приборной панели транспортного средства 1, которое сообщает водителю, что он выбрал или включил передачу заднего хода.
Этап 251 продолжается этапом 252, на котором вырабатывают заданное значение замедления транспортного средства 1, например, около пяти километров в час.
Во время этапа 253 применяют заданное значение, выработанное на этапе 252, чтобы замедлить транспортное средство 1. Эта заданное значение можно, например, применить путем постоянного торможения колес R1, R2, которое ограничивает скорость транспортного средства 1 по существу до пяти километров в час. Это позволяет снизить риск опасного ускорения транспортного средства 1 назад во время запуска с включенной задней передачей.
На этапе D6 убеждаются, что устройства торможения, которыми оснащено транспортное средство 1, являются выключенными, например, путем отпускания ручного тормоза и тормозной педали. Это позволяет определить, что транспортное средство 1 не просто стоит на месте, а что оператор готовится привести транспортное средство 1 в движение, поскольку он разблокирует любую систему парковки. Кроме того, датчик 16 сцепления может обнаружить, что оператор выжимает педаль 4 сцепления и размыкает, таким образом, сцепление 3. Если это так, этап D6 продолжается этапом D7, в противном случае возвращаются на этап 20.
На этапе D7 проверяют, что транспортное средство 1 находится в движении. Например, датчик 15 скорости, содержащий акселерометр и находящийся на второй кинематической цепи 6, выполнен с возможностью определять не равную нулю скорость транспортного средства 1. Таким образом, на этапе D7 можно обнаружить, что оператор применяет стратегию запуска «с толкача» и что транспортное средство 1 готовится набрать скорость на склоне в направлении вперед. Если это так, то ситуация использования, определенная на этапе D7, продолжается этапом 30. В противном случае возвращаются на этап 20.
Этапы D1-D7 осуществляют последовательно через равномерные промежутки времени, например, через каждые десять миллисекунд.
На этапе 30, когда сцепление 3 разомкнуто, транспортное средство находится в движении, и в коробке 14 передач включена передача, а система 2 трансмиссии находится в ситуации использования, определенной на этапах D1-D7, вычислительное устройство 7 определяет скорость вращения второй кинематической цепи 6, чтобы определить, что замыкание сцепления 3 может создать действительный динамический крутящий момент, превышающий порог обнаружения, содержащий значение крутящего момента обнаружения.
Вычисляют значение действительного динамического крутящего момента, суммируя значение действительного динамического крутящего момента, созданного при приведении в действие второй кинематической цепи 6, и значение инерции первой кинематической цепи 5, умноженное на производную в зависимости от времени фрикционного крутящего момента на сцеплении.
Определяют значение ограничения, умножив максимальное допустимое значение действительного динамического крутящего момента на коэффициент безопасности, и вычисляют производную действительного динамического крутящего момента в зависимости от времени.
На этапе 40 производную действительного динамического крутящего момента в зависимости от времени, вычисленную в реальном времени на этапе 30, сравнивают с пороговым значением.
Вычислительное устройство 7 вносит данные вычисления этапа 30 в картографию САТ, заранее установленную специально для системы 2 трансмиссии и содержащую максимальное допустимое для сцепления значение действительного динамического крутящего момента или его производной относительно времени в зависимости от измеренной скорости транспортного средства 1.
Таким образом, вычислительное устройство 7 определяет скорость транспортного средства 1, вычисляет значение действительного динамического крутящего момента и обращается к картографии САТ, определяя значение действительного динамического крутящего момента в зависимости от измеренной в реальном времени скорости транспортного средства.
Вычислительное устройство 7 определяет значение ограничения, равное значению действительного динамического крутящего момента, умноженному на коэффициент безопасности, составляющий от нуля до ста процентов, например, восемьдесят процентов, и вычисляет производную действительного динамического крутящего момента в зависимости от времени. Предпочтительно этот коэффициент безопасности можно корректировать в реальном времени. Например, он может учитывать массу транспортного средства 1, вычисленную в реальном времени.
На этапе С1 производную действительного динамического крутящего момента, скорректированную при помощи коэффициента безопасности, сравнивают с пороговым значением. Таким образом, определяют скорость транспортного средства 1, на которой оператор может безопасно замкнуть сцепление 3, даже резко отпустив педаль 4 сцепления. Это соответствует наиболее неблагоприятному случаю плохого использования.
Рассмотрение производной действительного динамического крутящего момента по отношению к времени позволяет подтвердить в реальном времени тенденцию опасного набора скорости транспортным средством 1 вплоть до потенциально разрушительного ударного момента на сцеплении.
Если производная действительного динамического крутящего момента превышает порог обнаружения, включающий в себя порог производной действительного динамического крутящего момента, переходят на этап 411. В противном случае возвращаются на этап 40.
Порог производной допустимого действительного динамического крутящего момента калибруют во время доводки системы 2 трансмиссии таким образом, что, когда производная действительного динамического крутящего момента превышает указанный порог, крутящий момент, проходящий через систему 2 трансмиссии, может за короткий срок повредить механические компоненты, связанные с системой 2 трансмиссии.
Максимальное значение передаваемого крутящего момента определяют во время проектирования и доводки сцепления 3, и оно зависит, в частности, от скорости и массы транспортного средства 1.
Если на этапе С1 производная действительного динамического крутящего момента не превышает значение указанного порога, возвращаются на этап 40, в противном случае этап С1 продолжается этапом 411.
На этапе 411 применяют стратегию защиты. Определяют соответствующее ситуации заданное значение регулирования скорости. Этап 411 переходит на этап 412.
Во время этапа 412 применяют заданное значение регулирования скорости, определенное на этапе 411.
Вычислительное устройство 7 регулирует действительный динамический крутящий момент таким образом, чтобы он был меньшим или равным значению ограничения, управляя скоростью элемента второй кинематической цепи, например, колес R1, R2.
Например, применяют управляемое торможение на четырех колесах R1, R2 транспортного средства 1, если его скорость является слишком высокой, или не применяют торможения, если скорость транспортного средства 1 может быть увеличена в соответствии с результатами этапа 40. Порог деактивации торможения определяют во время доводки системы 2 трансмиссии. Кроме того, можно не полностью блокировать колеса во время этого торможения, чтобы избежать риска потери контроля над транспортным средством 1.
Таким образом, скорость транспортного средства 1 регулируют вокруг значения скорости, вычисленного на этапе 30. Этап 412 переходит на этап 413.
Во время этапа 413 оператор может попытаться запустить двигатель 8 посредством замыкания сцепления 3. Водителю может быть передано сообщение, например, на приборную панель, чтобы он отпустил педаль 4 сцепления. Этап 413 переходит на этап С2.
Во время этапа С2, если коробка 14 передачи является механической, этап С2 переходит напрямую на этап D2, на котором проверяют, запустился ли двигатель, и при положительном результате возвращаются на этап 20.
Если коробка 14 передачи является полуавтоматической или роботизированной, этап С2 приводит сначала на этап 421, который возвращается на этап D2. Во время этапа 421 оператор отпускает педаль 4 сцепления, и сцепление постепенно замыкается устройствами регулирования, предусмотренными для этого типа коробки 14 передач. Во время замыкания сцепления 3 алгоритмы управления сцеплением 3 должны, в частности, способствовать синхронизации вала 11 двигателя 8 с первичным валом 13 второй кинематической цепи 6 без толчка или без продолжительного проскальзывания.
Картографию САТ можно обновлять в зависимости от состояния износа системы 2 трансмиссии. Она позволяет экстраполировать развитие износа сцепления 3, чтобы скорректировать значение передаваемого крутящего момента и минимизировать ударный момент в значении ниже порога деактивации ударного момента. Например, как только действительный динамический крутящий момент становится меньше значения ограничения, внутренний счетчик вычислительного устройства 7 включается на очень короткое заранее определенное время, например, на тридцать миллисекунд, чтобы инкрементировать счетчик, если в течение заранее определенного времени при каждой актуализации измерений действительный динамический крутящий момент превышает или равен значению ограничения. Если по истечении заранее определенного времени значение счетчика меньше порога деактивации, регулирование останавливают и возвращаются на этап 20.
Если при данном износе, который соответствует числу использований счетчика, значение передаваемого крутящего момента меньше минимального значения крутящего момента, оператор получает сообщение о необходимости проведения обслуживания сцепления 3.
Таким образом, устройство передачи крутящего момента оценивает в реальном времени крутящий момент на входе сцепления 3 и принимает стратегию защиты системы 2 трансмиссии в зависимости от мощности сцепления 3 и в зависимости от скорости транспортного средства 1.
Для установки устройства передачи крутящего момента не требуется никакого дополнительного физического средства.
Данные, необходимые для приведения в действие устройства передачи крутящего момента, поступают на шину данных от счетчиков 15, 16, 17, которыми оснащено транспортное средство 1.
Устройство передачи крутящего момента оценивает и подтверждает исключительную ситуацию использования и предиктивно управляет крутящим моментом на входе сцепления 3, чтобы избежать слишком раннего повреждения системы 2 трансмиссии, в частности, сцепления 3.
Таким образом, оно гарантирует механическую стойкость кинематических цепей 5, 6, несмотря на случайные или ненадлежащие воздействия.
Изобретение относится к защите трансмиссии транспортных средств. В способе передачи крутящего момента через систему трансмиссии транспортного средства, содержащую сцепление, расположенное между первой кинематической цепью и второй кинематической цепью, регулируют скорость приведения в действие второй кинематической цепи, если она может выдавать в первую кинематическую цепь действительный динамический крутящий момент, превышающий порог обнаружения. Первая переменная состояния содержит действительный динамический крутящий момент, посредством замыкания сцепления с передачей, включенной в коробке передач, соединенной со второй кинематической цепью. Снижается износ элементов трансмиссии. 8 з.п. ф-лы, 2 ил.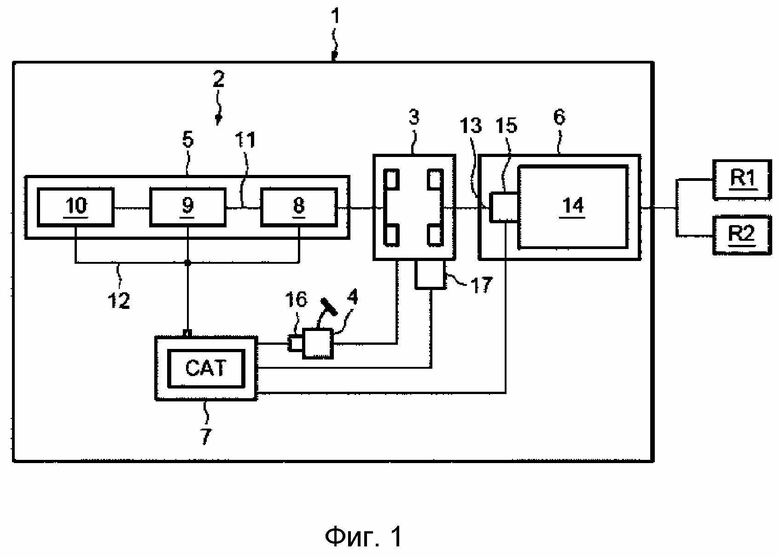
1. Способ передачи крутящего момента через систему (2) трансмиссии транспортного средства (1), содержащую сцепление (3), расположенное между первой кинематической цепью (5) и второй кинематической цепью (6), в котором определяют ситуацию использования системы (2) трансмиссии при разомкнутом состоянии сцепления (3), сравнивая по меньшей мере первую переменную состояния системы (2) трансмиссии по меньшей мере с одним порогом обнаружения, и регулируют вторую переменную состояния второй кинематической цепи (6) таким образом, чтобы вторая переменная состояния была меньше или равной значению ограничения в зависимости от результата сравнения, отличающийся тем, что регулируют скорость приведения в действие второй кинематической цепи (6), если она может выдавать в первую кинематическую цепь (5) действительный динамический крутящий момент, превышающий порог обнаружения, содержащий значение крутящего момента обнаружения, при этом первая переменная состояния содержит действительный динамический крутящий момент, посредством замыкания сцепления (3) с передачей, включенной в коробке (14) передач, соединенной со второй кинематической цепью (6).
2. Способ по п.1, в котором первая кинематическая цепь (5) содержит силовую установку (8).
3. Способ по п.2, в котором первая переменная состояния содержит режим силовой установки (8), при этом ситуацию использования определяют, когда режим двигателя (8) ниже порога обнаружения, содержащего минимальное значение режима двигателя (8).
4. Способ по любому из пп.1, 2 или 3, в котором регулируют вторую переменную состояния посредством торможения, применяемого к компоненту второй кинематической цепи (6).
5. Способ по любому из пп.1-4, в котором вычисляют значение действительного динамического крутящего момента, создаваемого при приведении в действие второй кинематической цепи (6), и значение инерции первой кинематической цепи (5), умноженное на производную, в зависимости от времени, фрикционного крутящего момента на сцеплении, определяют значение ограничения, умножая максимальное допустимое значение действительного динамического крутящего момента, извлеченное из картографии (САТ) в зависимости от измеренной скорости транспортного средства (1), на коэффициент безопасности, и вычисляют производную действительного динамического крутящего момента в зависимости от времени.
6. Способ по любому из пп.1-5, в котором первая переменная состояния содержит выбранную передачу, при этом применяют торможение транспортного средства, если выбрана передача заднего хода.
7. Способ по любому из пп.1-6, в котором сцепление (3) содержит средства регулирования замыкания сцепления (3), а регулирование второй переменной состояния сопровождается постепенным замыканием сцепления (3).
8. Способ по любому из пп.1-7, в котором первая переменная состояния содержит угол наклона транспортного средства (1) относительно горизонтальной плоскости, при этом указанный угол сравнивают с порогом обнаружения угла наклона.
9. Способ по любому из пп.1-8, в котором первая переменная состояния содержит состояние износа, связываемое со сцеплением (3) путем вычисления, когда сцепление (3) замкнуто, абсолютного значения разности скоростей вращения первой и второй кинематических цепей (5, 6) и последующего сравнения указанной разности с порогом проскальзывания в течение заранее определенного времени.
| US 2012265427 A1, 18.10.2012 | |||
| DE 19807095 A1, 26.08.1999 | |||
| FR 3048217 A1, 01.09.2017 | |||
| EP 3219976 A1, 20.09.2017 | |||
| СМЕЩЕНИЕ АССОЦИАЦИИ ДЛЯ ГЕТЕРОГЕННОЙ СЕТИ (HetNet) | 2011 |
|
RU2491628C1 |
| СПОСОБ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧИ ТРАНСМИССИИ В ТРАНСПОРТНОМ СРЕДСТВЕ С ГИБРИДНЫМ ПРИВОДОМ И ТРАНСПОРТНОЕ СРЕДСТВО С ГИБРИДНЫМ ПРИВОДОМ | 2013 |
|
RU2640432C2 |

