Настоящее изобретение относится к электроприводному косильному устройству, содержащему раму, имеющую соединительные точки, предназначенные для присоединения косильного устройства к инструментоносителю, оборудованному блоком электропитания, и несколько режущих модулей, причем каждый режущий модуль является подвесным, вертикально перемещающимся и невращающимся в направляющей режущего модуля, установленной в раме.
В сельском хозяйстве барабанные косилки и дисковые косилки, получающие энергию от вала отбора мощности (ВОМ) трактора, стали преобладающими устройствами, скашивающими траву для кормления животных. Ряд барабанов или дисков, соответственно, соединяют с рамой, оборудованной общей системой регулирования глубины, присутствующей, например, в форме опорных колес. В альтернативном варианте система регулирования глубины может быть реализована как несущая ручка косилки, которая имеет гидравлическую систему управления, содержащуюся в соединительной системе инструментоносителя или в каркасе косилки. Барабаны косилки барабанного типа поддерживает расположенная выше рама, в то время как диски косилки дискового типа поддерживает расположенная ниже балка.
Электропитание данных устройств сделала актуальной разработка блоков электропитания инструментоносителей, например, тракторов, в форме отдельных блоков, присоединяемых к инструментоносителю с возможностью отсоединения, или в форме блоков электропитания, составляющих единое целое с инструментоносителем, возможно даже объединенных с аккумуляторами.
До настоящего времени в большинстве устройств, получающих энергию от блока электропитания инструментоносителя, сохранялась общая концепция, установленная требованиями, определяемыми природой устройств для передачи механической мощности, представляющих собой большие блоки и не имеющие возможности индивидуального регулирования параметров, таких как рабочее положение, скорость и другие параметры для каждого рабочего элемента, т.е. каждого барабана или диска косилки, осуществляющей резание травы.
В документе ЕР 2957162 А1 раскрыта самодвижущаяся косилка с регулируемой шириной скашивания, содержащая основной корпус самодвижущейся косилки; по меньшей мере одно установленное внутри устройство из аккумулятора, электрического генератора и двигателя; крылья, которые выступают из основного корпуса косилки, причем выступающие крылья могут выдвигаться, и при этом длина выдвижения крыльев является регулируемой; множество носильных элементов, которые выступают от передней поверхности основного корпуса косилки и передней поверхности крыльев, причем каждый элемент приводит в действие электрический мотор или двигатель, и при этом электрический двигатель получает энергию от аккумулятора или электрического генератора.
Из документа WO 2016057837 известна косилка, движущаяся в соответствии с контуром поверхности. Вращающееся соединительное устройство присоединено к двигателю, который прикреплен к раме косилки, причем барабанный элемент косилки выполнен с возможностью аксиального перемещения под действием вращающегося соединительного устройства, содержащего неподвижную часть, присоединенную к раме, и вращающуюся часть, а телескопический вал находится в технологическом соединении с вращающейся частью вращающегося соединительного устройства.
В документе JP 200116221 А раскрыт генератор электроэнергии, содержащий основание 1, трубчатый ветровой направляющий элемент, имеющий переменный диаметр и прикрепленный к раме, и ветродвигатель, помещенный в трубчатый ветровой направляющий элемент, устройство для помещения ветродвигателя, состоящее в основном из одной или нескольких поворотных ручек, которые проходят между рамой, с одной стороны, и ветродвигателем, с другой стороны, а также приводные приспособления для движения и ручек.
Из документа US 20020073674 А1 известна система скашивания и мульчирования для газонокосилок, имеющих ножи с множеством лезвий, присоединенных к работающему от двигателя приводному валу и вращающихся в горшкообразном корпусе, открывающемся с нижней стороны. Лезвия присоединены к центральной втулочной части, образующей несколько сегментов с режущей кромкой на передних краевых зонах лезвий ножей в направлении вращения, а также отбойных или ведрообразных отражающих элементов на задних краевых зонах.
Целью настоящего изобретения является полное или частичное устранение по меньшей мере одного из недостатков предшествующего уровня техники или по меньшей мере предложение приемлемой альтернативы предшествующему уровню техники.
Эта цель достигнута посредством признаков, которые приведены в описании и следующей за ним формуле настоящего изобретения.
В настоящем изобретении предложено электроприводное косильное устройство, содержащее несколько режущих модулей, причем каждый режущий модуль содержит режущий диск, снабженный режущими Лезвиями или аналогичными приспособлениями, выступающими от периферии диска. Каждый режущий модуль оборудован электроприводным двигателем. Каждый режущий модуль подвешен в раме косилки с использованием системы регулирования высоты резания, выполненной с возможностью перемещения режущего модуля в вертикальном направлении по отношению к раме косилки. Система регулирования высоты резания может получать энергию от гидравлического или электрического устройства. Высота резания каждого режущего модуля может быть установлена в соответствии с уровнем земли вблизи режущего модуля на основании информации, поступающей от определяющих уровень земли приспособлений, или информации, поступающей от спутниковой системы позиционирования (GPS или аналогичной системы), или их комбинации.
Рама косилки может быть выполнена с возможностью присоединения к сцепному устройству трактора или к трехточечному соединительному устройству трактора и может содержать одно или несколько опорных колес. В качестве альтернативы, косилка представляет собой автономное устройство, оборудованное аккумуляторным блоком и выполненное с возможностью автоматического соединения с зарядной станцией.
Определяющее уровень земли приспособление может представлять собой простое механическое приспособление, установленное на косильное устройство или каждый режущий модуль для оценки высота резания, причем оно может представлять собой контактное приспособление, касающееся земли, или может представлять собой бесконтактное приспособление, такое как радарный датчик. Кроме того, система управления может учитывать скорость инструментоносителя и направление его движения посредством поворота датчиков колес в комбинации со спутниковой системой позиционирования или индивидуально.
Параметры высоты резания также могут быть изменены в зависимости от эксплуатационных характеристик каждого режущего элемента, и это означает, что высота по меньшей мере одного режущего элемента может быть изменена с переходом на более высокий уровень в том случае, если по меньшей мере один из двигателей достигает своей предельной мощности вследствие столкновения с препятствием или при попадании в область с очень высокой плотностью срезаемых растений. Единственное ограничение при изменении высоты резания может быть сохранение перекрывания между режущими модулями вдоль косильного устройства или сохранение перекрывания между косильными устройствами в том случае, когда несколько косильных устройств присоединены к инструментоносителю.
Чтобы обеспечить горизонтальное перекрывание при резании между соседними режущими модулями, вращение двигателей всех режущих модулей в одном косильном устройстве является синхронизированным, чтобы предотвратить столкновение между режущими лезвиями соседних режущих дисков. В качестве альтернативы, режущие модули косильного устройства могут быть расположены в два ряда в поперечном направлении по отношению к направлению работы косилки, в результате чего допускается увеличение расстояния между режущими модулями, и в то же время сохраняется перекрывание поперечном направлении по отношению к направлению работы.
Рама косильного устройства может состоять из секций, в результате чего становится возможным регулирование рабочей ширины косильного устройства путем складывания или подъема одной или нескольких наружных рамных секций и прекращения энергоснабжения соответствующих режущих модулей. Каждая из рамных секций может содержать один или несколько режущих модулей.
Настоящее изобретение определено в независимом пункте формулы изобретения. Зависимые пункты формулы изобретения определяют предпочтительные варианты осуществления настоящего изобретения.
Согласно первому аспекту настоящее изобретение относится, в частности, к электроприводному косильному устройству, содержащему:
раму, имеющую соединительные точки, предназначенные для присоединения косильного устройства к инструментоносителю, оборудованному блоком электропитания,
несколько режущих модулей, причем каждый режущий модуль является подвесным, вертикально перемещающимся и невращающимся в направляющей режущего модуля установленный в раме, причем
каждый режущий модуль содержит режущий диск и электрический двигатель, питаемый энергией от блока электропитания, причем указанный режущий диск присоединен к приводному валу двигателя, и
исполнительный механизм, образующий связь между режущим модулем и рамой.
Преимущество настоящего изобретения заключается в том, что регулирование высоты резания индивидуальных режущих модулей упрощено путем перемещения режущего и ведущего блока как единого целого.
Исполнительный механизм может представлять собой пружину. Преимущество этого заключается в том, что нижняя поверхность режущих дисков скользит по земле, давление на землю может регулироваться по меньшей мере тем, что пружины принимают основной вес режущих модулей, позволяя режущим модулям «плавать» путем использования простых и экономичных приспособлений.
В качестве альтернативы, исполнительный механизм может представлять собой гидравлический цилиндр или электроприводной исполнительный механизм. Преимущество этого варианта заключается в том, что высота резания режущих модулей соответствует контуру поверхности земли без создания нагрузки на землю.
Система управления косилкой может быть выполнена с возможностью установки высоты резания каждого режущего модуля в соответствии с уровнем земли вблизи соответствующего режущего модуля по отношению к уровню рамы посредством обработки информации, поступающей от определяющих уровень земли приспособлений или антенны спутниковой системы позиционирования, или их комбинации. Преимущество этого заключается в том, что система управления косилкой может быть основана на установке высоты резания на основании различных источников поступающей информации.
Скорость вращения, направление вращения и угол вращения двигателей всех режущих модулей могут быть синхронизированы. Преимущество этого заключается в том, что режущие модули могут быть расположены в линию, обеспечивая короткую длину рамы косилки, наблюдаемую в направлении перемещения косилки.
Скорость вращения может быть индивидуально установлена для каждого двигателя. Кроме того, направление вращения может быть индивидуально установлено для каждого двигателя. Преимущество таких признаков представляет собой улучшенное приспособление режущих характеристик косилки к фактическим полевым условиям.
Режущие модули могут быть расположены в два ряда в поперечном направлении по отношению к направлению работы косильного устройства. Преимущество этого варианта осуществления заключается в том, что управление двигателем упрощено, что допускает индивидуальную работу двигателя без риска столкновения между соседними режущими дисками.
Рама может состоять из секций, причем одна или несколько наружных рамных секций выполнены с возможностью складывания по отношению к базовой рамной секции, и при этом каждая из наружных рамных секций может содержать по меньшей мере один режущий модуль. Таким образом, рабочая ширина косильного устройства может легко регулироваться даже в то время, когда работает косильное устройство. Кроме того, секции могут быть выполнены с возможностью поворота по отношению к направлению работы, например, чтобы осуществлять скашивание вокруг опор линий электропередач и стоек или столбов изгороди.
Согласно второму аспекту настоящее изобретение относится, в частности, к электроприводному инструментоносителю, содержащему одно или несколько электроприводных косильных устройств, которые описаны выше, причем инструментоноситель является автономным и выполнен с возможностью автоматической установки на электрическое зарядное устройство. Таким образом, инструментоноситель может осуществлять длительное скашивание без необходимости непрерывного присутствия оператора.
Далее описаны примеры предпочтительных вариантов осуществления, проиллюстрированных на сопровождающих чертежах, в частности:
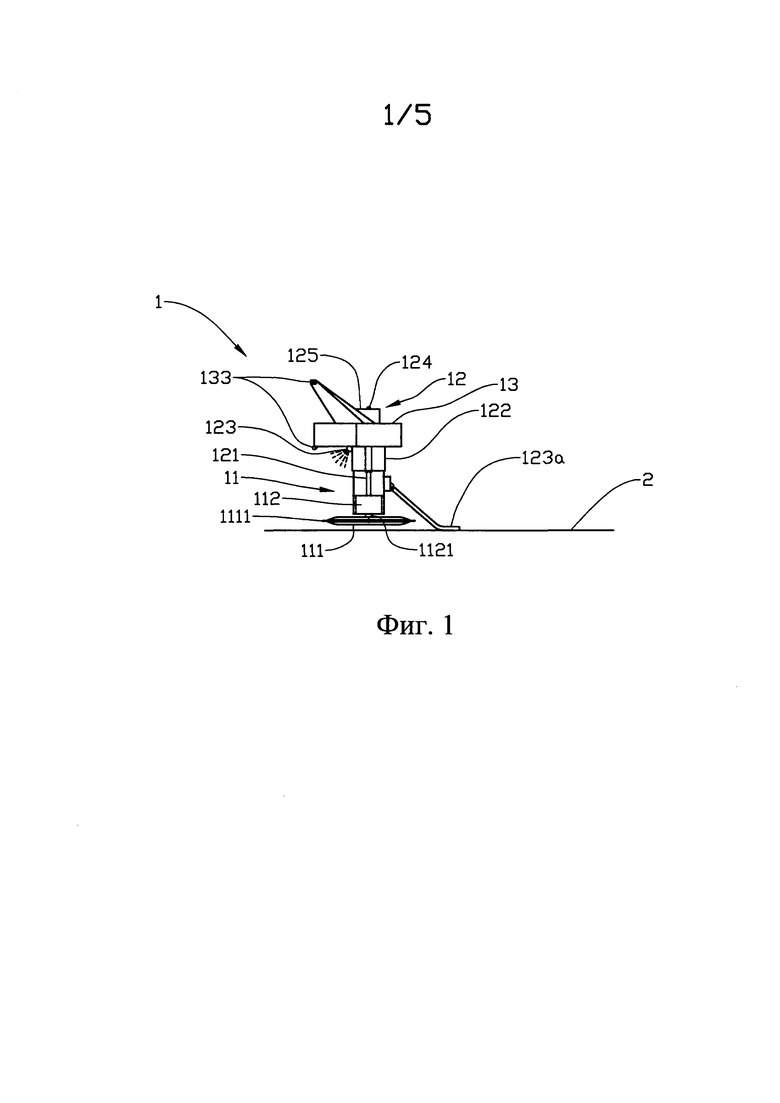
на Фиг. 1 представлен вид сбоку косильного устройства согласно настоящему изобретению;
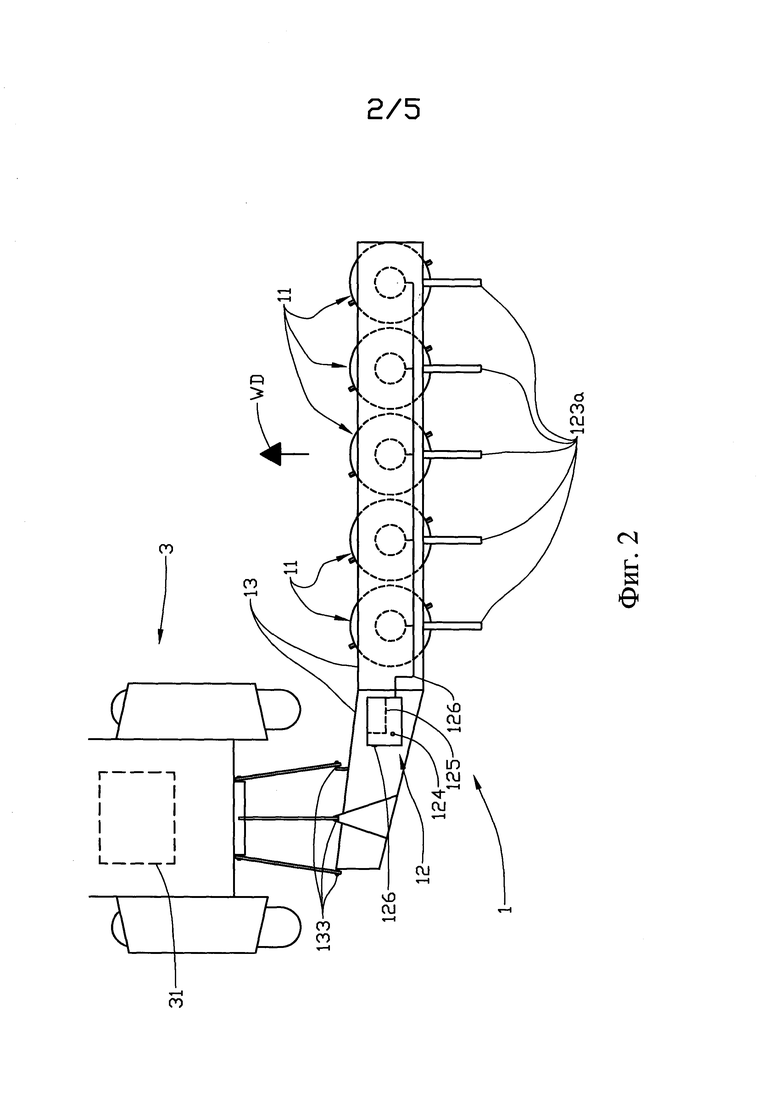
на Фиг. 2 представлен вид сверху косильного устройства согласно первому варианту осуществления;
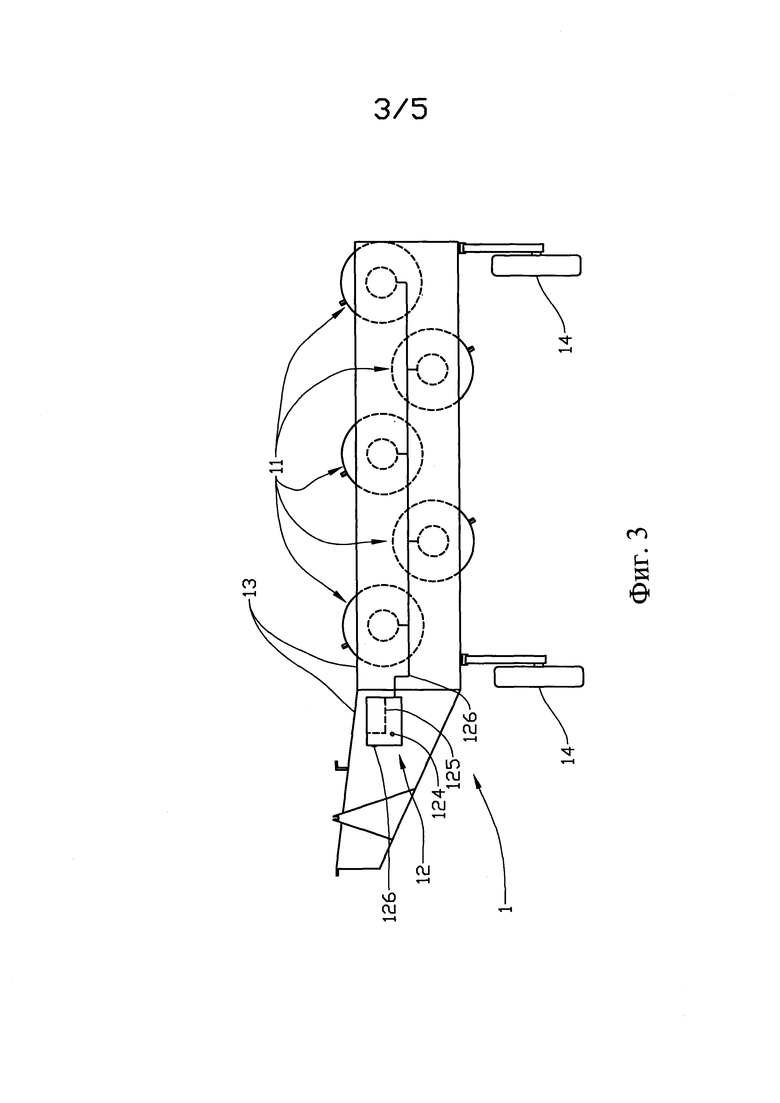
на Фиг. 3 представлен вид сверху косильного устройства согласно второму варианту осуществления;
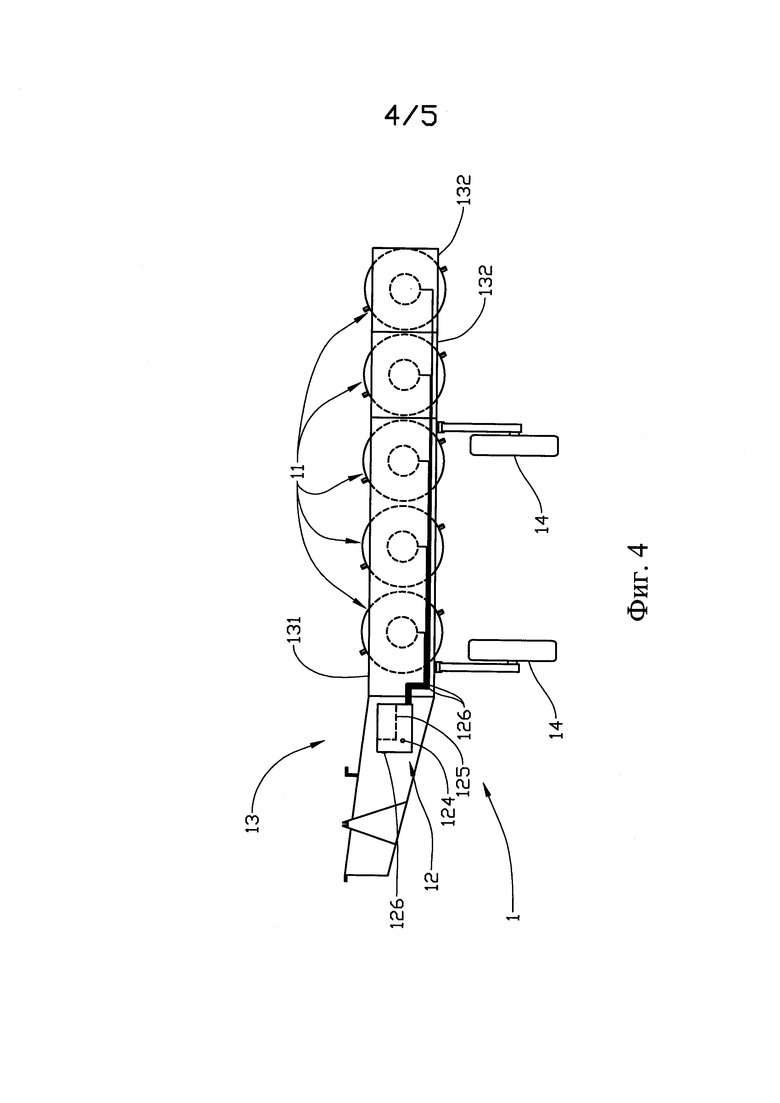
на Фиг. 4 представлен вид сверху косильного устройства согласно третьему варианту осуществления; и
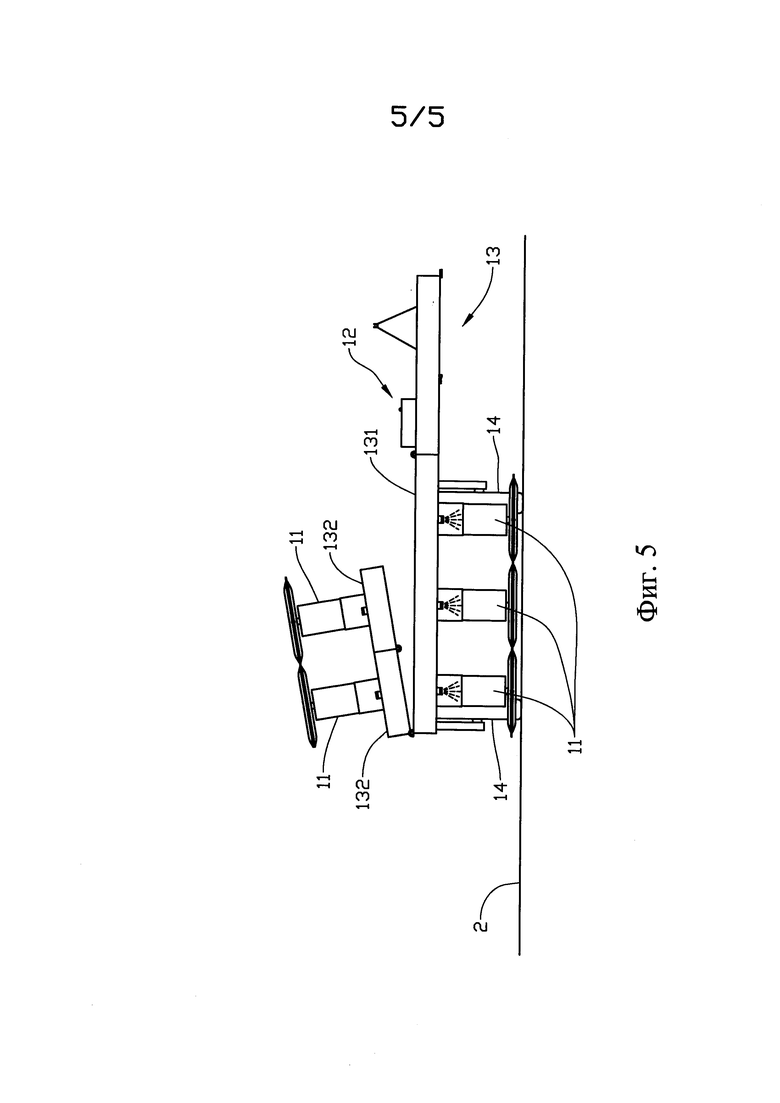
на Фиг. 5 представлен вид спереди косильного устройства согласно третьему варианту осуществления, в котором две рамные секции и соответствующие режущие модули сложены над рамой.
На фигурах представлено косильное устройство 1 согласно настоящему изобретению, содержащее несколько режущих модулей 11, подвешенных в раме 13. Как представлено на Фиг. 2, косилка выполнена с возможностью присоединения к инструментоносителю 3, например, трактору, через соединительные точки 133, например, к обычному трехточечному соединительному устройству трактора. Инструментоноситель 3 оборудован блок электропитания 31, выполненный с возможностью снабжения электрической энергией косилки 1 посредством системы 12 управления косилкой.
Далее рассмотрим Фиг. 1 и 2. Каждый режущий модуль 11 содержит режущий диск 111, расположенный на конце приводного вала 1121 электрического двигателя 112 и вращающийся вокруг оси вращения посредством двигателя 112. Режущие диски снабжены режущими лезвиями 1111, проходя от периферии режущих дисков 111.
Режущие модули 11 выполнены с возможностью вертикального перемещения по отношению к раме 13, причем режущие модули 11 расположены без возможности вращения в направляющих 122 режущих модулей, проходящих от рамы 13.
Косильное устройство 1 может быть оборудовано одним или несколькими опорными колесами 14, расположенными сзади рамы 13 (см. Фиг. 3 и 4), с возможностью регулирования для обеспечения установки рамы на желательной высоте над поверхностью земли 2, по которой перемещается косильное устройство в процессе скашивания растений.
Система 12 управления косилкой выполнена с возможностью присоединения к блоку электропитания 31 инструментоносителя 3 через один или несколько передающих электроэнергию контактов 126, причем указанный блок электропитания 31 выполнен с возможностью снабжения электроэнергией системы 12 управления косилкой и далее электрических двигателей 112, а также, возможно, любого типа гидравлических цилиндров, содержащих сжатую жидкость, и т.д.
Система 12 управления косилкой оборудована одной или несколькими управляющими линиями 126, которые соединяют каждый из режущих модулей 11 и одно или несколько средств 125 управления исполнительным механизмом, передавая энергию электрическим двигателям 112 и, возможно, исполнительным механизмам 121, выполненным с возможностью индивидуального перемещения режущих модулей по отношению к раме 13.
В своей простейшей форме исполнительные механизмы 121 могут представлять собой пружины, позволяющие режущим элементам "плавать", т.е. обеспечивающие работу каждого режущего модуля 11 с созданием низкого давления нижней поверхности режущих дисков на землю.
В качестве альтернативы, исполнительные механизмы 121 могут иметь электрические или гидравлические средства управления в форме электрических исполнительных механизмов или гидравлических цилиндров.
Когда присутствуют исполнительные механизмы 121 с электрическими или гидравлическими средствами управления, система 12 управления косилкой также содержит определяющие уровень земли приспособления, в качестве которых присутствуют одно или несколько бесконтактных определяющих уровень земли приспособлений 123, которые определяют уровень земли спереди или сзади рамы 13, или одно или несколько определяющих уровень земли приспособлений 123а, которые перемещаются по земле за рамой 13, и при этом каждое из определяющих уровень земли приспособлений 123а предпочтительно регулируется посредством исполнительного механизма (не представлен), возможно по одному для каждого режущего модуля 11, и/или антенна 124 спутниковой системы позиционирования, установленной на косильном устройстве 1, как представлено на фигурах, или, в качестве альтернативы, на инструментоносителе 3, и с помощью средств управления (не представлены), выполненных с возможностью обработки данных, полученных от указанных определяющих уровень земли приспособлений 123, 123а или антенны 124 спутниковой системы позиционирования, или их комбинации, и в результате этого система 12 управления косилкой получает возможность индивидуальной установки высоты резания каждого режущего модуля 12 в процессе работы, таким образом, сохраняя установленную высоту резания даже при работе на неровной поверхности.
Когда все режущие модули 11 расположены на линии в поперечном направлении по отношению к направлению работы WD, как представлено на Фиг. 2, скорость вращения, направление вращения и угол вращения всех двигателей 112 должны быть синхронизированы, чтобы обеспечивать перекрывание диапазонов резания режущих модулей без какого-либо риска столкновения режущих лезвий 1111 на соседних режущих дисках 111.
Путем расположения режущих модулей 11 в два ряда, как представлено на Фиг. 3, получается перекрывание без необходимости синхронизации двигателей 112.
Путем установки двигателя 112 в каждом режущем модуле 11 косильное устройство 1 может быть легко приспособлено к форме и размеру поля, подлежащего выкашиванию, за счет применения косилки, имеющей складывающуюся раму 13, см. Фиг. 4 и 5. Складывающиеся наружные рамные секции 132 (здесь представлены две складывающиеся рамные секции 132) присоединены к базовой рамной секции 131 посредством шарнирных соединений 134. Каждая складывающаяся рамная секция 132 может содержать несколько режущих модулей 11. Складывание предпочтительно осуществляется посредством одного или нескольких исполнительных механизмов, например, гидравлических цилиндров (не представлены).
Когда присутствуют складывающиеся рамные секции 132, система 12 управления косилкой предпочтительно выполнена с возможностью запуска и остановки по меньшей мере двигателей 112 режущих модулей 11, подвешенных в складывающихся рамных секциях 132 индивидуально и независимо от остальных двигателей 112.
Путем включения одного или нескольких косильных устройств 1 согласно настоящему изобретению в автономный электрический инструментоноситель, оборудованный аккумуляторами электроэнергии и выполненный с возможностью автоматической установки на электрическое зарядное устройство, получена автоматически управляемая самодвижущаяся косилка, осуществляющая автоматическое скашивание с приемлемой производительностью и гибкостью.
Следует отметить, что представленные выше варианты иллюстрируют, но не ограничивают настоящее изобретение, и что специалисты в данной области техники смогут создать многочисленные альтернативные варианты осуществления без выхода за пределы объема прилагаемой формулы изобретения. В формуле изобретения любые условные обозначения, расположенные в круглых скобках, не следует рассматривать как ограничивающие формулу изобретения. Использование глагола «содержать» и форм его спряжении не исключает присутствия элементов или стадий, которые не представлены в формуле изобретения. Использование форм единственного числа любого элемента не исключает присутствия множества таких элементов.
Тот факт, что определенные признак и представлены в различных зависимых пунктах формулы изобретения, не указывает сам по себе, что комбинация указанных признаков не может быть использована с достижением преимущества.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЖУЩИЙ МОДУЛЬ КОСИЛКИ | 2003 |
|
RU2241325C1 |
| УБОРОЧНАЯ МАШИНА | 1992 |
|
RU2044449C1 |
| Косилка | 1986 |
|
SU1595323A3 |
| Сельскохозяйственное орудие | 1974 |
|
SU1019987A3 |
| СЛЕДУЮЩИЙ РЕЛЬЕФУ НАВЕСНОЙ БРУС | 2017 |
|
RU2720869C1 |
| Система для выравнивания по рельефам поля навесного бруса, несущего высевающие секции, и система управления для выравнивания по рельефам поля инструмента, содержащего рамный элемент и навесной брус | 2017 |
|
RU2807349C2 |
| АВТОНОМНАЯ ГАЗОНОКОСИЛКА | 1991 |
|
RU2103860C1 |
| КОСИЛКА-ВЕЗДЕХОД ДЛЯ УБОРКИ ТРОСТНИКА | 1957 |
|
SU110008A1 |
| Исполнительный орган добычной горной машины, в частности струга | 1990 |
|
SU1836555A3 |
| АВТОМАТИЧЕСКИ УПРАВЛЯЕМЫЕ РЕДУКТОРЫ ДЛЯ ОРУДИЯ С ПОВОРОТНЫМ ДЫШЛОМ | 2011 |
|
RU2561752C2 |
Электроприводное косильное устройство содержит раму, имеющую соединительные точки, предназначенные для присоединения косильного устройства к инструментоносителю, снабженному блоком электропитания, несколько режущих модулей и исполнительный механизм. Каждый режущий модуль является подвесным, вертикально перемещающимся и невращающимся в направляющей режущего модуля, установленной в раме. Каждый режущий модуль содержит режущий диск и электрический двигатель, питаемый энергией от блока электропитания. Указанный режущий диск присоединен к приводному валу двигателя. Исполнительный механизм образует связь между режущим модулем и рамой. При этом система управления косилкой выполнена с возможностью установки высоты резания каждого режущего модуля в соответствии с уровнем земли вблизи соответствующего режущего модуля по отношению к уровню рамы путем обработки информации, поступающей от определяющих уровень земли приспособлений или антенны спутниковой системы позиционирования или их комбинации. Изобретение позволит улучшить качество срезания растений при неровной поверхности земли. 2 н. и 8 з.п. ф-лы, 5 ил.
1. Электроприводное косильное устройство (1), содержащее:
раму (13), имеющую соединительные точки (132), предназначенные для присоединения косильного устройства (1) к инструментоносителю (3), снабженному блоком электропитания (31),
несколько режущих модулей (11), причем каждый режущий модуль (11) является подвесным, вертикально перемещающимся и невращающимся в направляющей (122) режущего модуля, установленной в раме (13),
причем каждый режущий модуль (11) содержит режущий диск (111) и электрический двигатель (112), питаемый энергией от блока электропитания (31), причем указанный режущий диск (111) присоединен к приводному валу (1121) двигателя, и
исполнительный механизм (121), образующий связь между режущим модулем (11) и рамой (13),
при этом система (12) управления косилкой выполнена с возможностью установки высоты резания каждого режущего модуля (11) в соответствии с уровнем земли (2) вблизи соответствующего режущего модуля (11) по отношению к уровню рамы (13) путем обработки информации, поступающей от определяющих уровень земли приспособлений (123, 123а) или антенны (124) спутниковой системы позиционирования или их комбинации.
2. Электроприводное косильное устройство (1) по п. 1, в котором исполнительный механизм (121) представляет собой пружину.
3. Электроприводное косильное устройство (1) по п. 1, в котором исполнительный механизм (121) представляет собой гидравлический цилиндр или электроприводной исполнительный механизм.
4. Электроприводное косильное устройство (1) по п. 1, в котором определяющее уровень земли приспособление представляет собой регулируемую опору (123а).
5. Электроприводное косильное устройство (1) по п. 1, в котором скорость вращения, направление вращения и угол вращения двигателей (112) всех режущих модулей (11) синхронизированы.
6. Электроприводное косильное устройство (1) по п. 1, в котором скорость вращения может быть индивидуально установлена для каждого двигателя (112).
7. Электроприводное косильное устройство (1) по п. 1, в котором направление вращения может быть индивидуально установлено для каждого двигателя (112).
8. Электроприводное косильное устройство (1) по п. 1, в котором режущие модули (11) расположены в два ряда в поперечном направлении по отношению к направлению работы (WD) косильного устройства (1).
9. Электроприводное косильное устройство (1) по п. 1, в котором рама (13) состоит из секций, причем одна или несколько наружных рамных секций (132) выполнены с возможностью складывания по отношению к базовой рамной секции (131), и при этом каждая из наружных рамных секций (132) содержит по меньшей мере один режущий модуль (11).
10. Электроприводной инструментоноситель (3), содержащий одно или несколько электроприводных косильных устройств (1) по п. 1, причем инструментоноситель (3) является автономным и выполнен с возможностью автоматической установки на электрическое зарядное устройство.
| DE 202013006712 U1, 02.10.2013 | |||
| EP 2957162 A4, 20.07.2016 | |||
| US 20130152535 A1, 20.06.2013 | |||
| Ротационная косилка | 1988 |
|
SU1674726A1 |
| US 5996323 A1, 07.12.1999. | |||

