Изобретение относится к области медицинской ультразвуковой техники, а именно к способам управления процессом внешней липосакции, и предназначено для повышения качества операций за счет исключения чрезмерного ультразвукового воздействия на отдельные участки тела и снижения уровня нагрева ультразвуковых колебательных систем (ультразвуковых излучателей) аппаратов.
Уже более 50 лет для проведения процедуры липосакции используют устройства, обеспечивающие удаление подкожных жировых отложений через проколы в коже. Непосредственно перед удалением жира осуществляют разрушение подкожно-жировой клетчатки механическими способами (вакуумная липосакция) или с помощью ультразвуковых колебаний высокой интенсивности (ультразвуковая внутренняя липосакция) [1].
Новым направлением в области липосакции является внешняя ультразвуковая липосакции, которая осуществляется за счет введения ультразвуковых колебаний в подкожно-жировую клетчатку через поверхность кожи пациента. Благодаря введению ультразвуковых колебаний высокой интенсивности (более 2 Вт/см2) в жировой ткани возникает эффект кавитации (образуются взрывающиеся кавитационные пузырьки). Кавитационные пузырьки разжижают жир. Перемещаясь из области с низким давлением в область высокого давления, кавитационный пузырек уменьшается в размерах и схлопывается - происходит своего рода «микровзрыв», который разрушает мембраны жировых клеток. В конечном счете освободившийся жир выводится из организма естественным путем через лимфатическую и кровеносную системы.
Для появления эффекта кавитации необходимы определенные условия, а именно: высокая интенсивность (более 2 Вт/см2) колебаний с частотой 39-41 кГц. Благодаря этому удается обеспечить возникновение кавитации на глубине до 8-10 мм.
На сегодняшний день существует несколько медицинских аппаратов, реализующих процедуру внешней липосакции при помощи ультразвуковых колебаний высокой интенсивности (итальянской фирмы TriWorks - «Synetica», американской фирмы Ultrashape Inc - «UltraShape Contour I», итальянской фирмы Manola Tesoro - «ULTRA», американской фирмы RAH-MediCell и др.). Действие всех аппаратов при реализации процесса ультразвуковой внешней липосакции основано на реализации определенного способа управления процессом ультразвуковой внешней липосакции.
Наиболее близким по технической сущности является способ управления процессом ультразвуковой внешней липосакции, реализованный в аппарате американской фирмы Ultrashape Inc (Yoqneam Illite, Иллинойс) - «UltraShape Contour I», выполненном по патенту США 7331951 от 19 февраля 2008 г., и принятый за прототип [2].
Способ управления процессом ультразвуковой внешней липосакции, принятый за прототип, заключается в непрерывном измерении амплитуды колебаний излучающей поверхности пьезоэлектрической ультразвуковой колебательной системы по величине амплитуды электрического тока в процессе ее перемещения по поверхности тела человека, сравнении амплитуды тока посредством схемы сравнения с амплитудой тока, задаваемой с помощью управляющего блока и корректировки амплитуды электрического напряжения, подаваемого от генератора к пьезопреобразователю колебательной системы.
Реализуется этот способ в известном аппарате следующим образом. Электронный генератор вырабатывает электрический сигнал ультразвуковой частоты, который усиливается усилителем мощности и через блок согласования подается на пьезоэлектрические элементы (пьезопреобразователь) ультразвуковой колебательной системы [3]. Величина электрического тока, протекающего через пьезокерамические элементы ультразвуковой колебательной системы, удерживается такой, чтобы интенсивность ультразвуковых колебаний была достаточной для зарождения в тканях пациента ультразвуковой кавитации, что соответствует 2 Вт/см2 и более. Такой режим воздействия достигается путем непрерывного измерения электрического тока, потребляемого ультразвуковой колебательной системой, сравнения его с уставкой, задаваемой оператором и соответствующей корректировкой электрического напряжения, прикладываемого к пьезокерамическим элементам ультразвуковой колебательной системы.
При реализации способа, принятого за прототип, реализуется режим работы, при котором частота электронного генератора и резонансная частота колебательной системы не совпадают, что приводит к снижению амплитуды механических колебаний излучающей поверхности колебательной системы, необходимости повышения ее системами стабилизации амплитуды, что, как следствие, ведет к чрезмерному разогреву рабочего инструмента. Недостаток обусловлен используемым критерием приближения частоты электронного генератора к значению собственной частоты колебательной системы. Физический смысл недостатка заключается в том, что фазочастотная характеристика тока, протекающего через пьезопреобразователь колебательной системы, не совпадает с фазочастотной характеристикой ультразвуковой колебательной системы как механической системы.
Система автоматической подстройки частоты, при использовании прототипа, устанавливает режим работы, при котором обеспечивается равенство нулю фазы между током, протекающим через пьезопреобразователь системы и напряжением на нем. Это не обеспечивает максимального значения амплитуды механических колебаний, поскольку равенство нулю фазы между током, протекающим через пьезопреобразователь и напряжения на нем, не соответствует максимальному значению амплитуды тока, протекающего через пьезопреобразователь колебательной системы.
Кроме того, сдвиг ФЧХ тока, протекающего через преобразователь колебательной системы, не является величиной постоянной и зависит от изменения электрической емкости пьезокерамических элементов преобразователя, в результате изменения их температуры в процессе работы и от величины акустической нагрузки, которая изменяется в процессе ультразвукового воздействия.
Следовательно, способ управления, базирующийся на контроле полного электрического тока, протекающего через колебательную систему и зависящего от изменений собственной электрической емкости пьезоэлектрических элементов, не обеспечивает работу ультразвукового генератора на резонансной частоте колебательной системы.
При условии даже незначительного рассогласования по частоте электронного генератора и высокодобротной пьезоэлектрической колебательной системы амплитуда механических колебаний уменьшается, что снижает эффективность устройства [4]. Этот недостаток снижает эффективность операции внешней липосакции из-за уменьшения энергии УЗ колебаний, вводимых в пациента в процессе перемещения колебательной системы по поверхности кожи.
При реализации процедуры липосакции с помощью известного устройства, в котором реализован способ управления, принятый за прототип, оператор (врач) непрерывно перемещает колебательную систему по поверхности кожи вдоль проблемных участков, обеспечивая непрерывный ввод энергии через жидкие кремы или гели. Поэтому при использовании прототипа возникает необходимость в ограничении излучаемой мощности.
Ограничение предельной излучаемой мощности ультразвуковых колебаний обусловлено возможностью чрезмерного нагрева локального участка тела пациента при остановке перемещения колебательной системы и длительного введения колебаний в одну область под излучающей поверхностью.
Поэтому еще одним недостатком способа, принятого за прототип, является невозможность повышения мощности излучаемых колебаний (увеличения производительности процесса липосакции) из-за возможности нанесения внутреннего ожога пациенту при намеренной или случайной фиксации колебательной системы на одном участке поверхности кожи.
Ввиду недостаточной эффективности известного способа управления процессом ультразвуковой внешней липосакции, принятого за прототип, в рассматриваемом аппарате для ультразвуковой внешней липосакции дополнительно непрерывно осуществляется контроль температуры обрабатываемой зоны пациента при помощи инфракрасного сенсора, и в случае превышения критического уровня на информационном табло выводится сообщение «Температура слишком высокая». Кроме того, в известном аппарате непрерывно осуществляется контроль акустического контакта ультразвуковой колебательной системы с телом пациента, и в случае недостаточного акустического контакта на информационное табло выводится сообщение «Плохой акустический контакт».
Наличие систем оповещения о достижении критической температуры тела пациента и качестве акустического контакта не гарантирует исключения ожогов поверхности тела пациента и длительную непрерывную работу ультразвукового аппарата. Очевидно, что в этом случае качество проведения операции и безопасность пациентов определяется, в первую очередь, квалификацией оператора, а не эффективностью способа управления процессом ультразвуковой липосакции, принятого за прототип.
Если оператор несвоевременно реагирует на сигналы о недостаточном акустическом контакте, это может привести к быстрому разогреву ультразвуковой колебательной системы, поскольку снижается выход акустической энергии в тело пациента.
В случае, если оператор удерживает длительное время ультразвуковой излучатель на одном месте, перекрывая доступ инфракрасного температурного сенсора к поверхности обрабатываемого участка тела пациента, это может привести к термическому ожогу пациента, а также к разогреву ультразвуковой колебательной системы и соответственно срабатыванию тепловой защиты.
Нагрев ультразвуковой колебательной системы является также нежелательным, поскольку это может привести к полной или частичной деполяризации пьезокерамических элементов, составляющих основу ультразвуковых колебательных систем [5]. Именно вероятность перегрева ультразвуковой колебательной системы и обусловливает применение жидкостного охлаждения, что усложняет его конструкцию.
Таким образом, выявленные недостатки известного способа управления процессом ультразвуковой липосакции снижают эффективность ультразвуковой внешней липосакции, обусловливают снижение качества и производительности операции внешней ультразвуковой липосакции, а в некоторых случаях делают ее опасной для здоровья пациентов.
Предлагаемый способ управления процессом внешней ультразвуковой липосакции направлен на устранение недостатков прототипа и создание нового способа управления, способного повысить эффективность процесса внешней ультразвуковой липосакции за счет обеспечения ультразвукового воздействия с большей интенсивностью и производительностью, в течение более длительного времени без критического повышения температуры как тела пациента, так и самой ультразвуковой колебательной системы.
Предлагаемый способ управления процессом внешней ультразвуковой липосакции заключается в непрерывном измерении амплитуды колебаний излучающей поверхности пьезоэлектрической ультразвуковой колебательной системы по величине амплитуды электрического тока в процессе ее перемещения по поверхности тела человека, сравнении амплитуды тока посредством схемы сравнения с амплитудой тока, задаваемой с управляющего блока и корректировке амплитуды электрического напряжения, подаваемого от генератора к пьезопреобразователю колебательной системы. Причем измерение амплитуды колебаний излучающей поверхности ультразвуковой колебательной системы осуществляют по величине амплитуды электрического тока, являющегося разностью между током, протекающим через пьезопреобразователь колебательной системы, и реактивным емкостным током, обусловленным электрической емкостью элементов пьезопреобразователя, подают на пьезопреобразователь колебательной системы рабочее напряжение, а измеренное в каждый момент времени значение амплитуды колебаний сравнивают со значением амплитуды колебаний, измеренной в предыдущий момент времени, и в случае, если изменение амплитуды колебаний за установленный интервал не превышает значения, установленного в памяти управляющего блока ультразвукового генератора, уменьшают амплитуду электрического напряжения до минимального значения, а в случае, когда изменение амплитуды колебаний за установленный интервал при подаваемом минимальном электрическом напряжении превышает значение, установленное в памяти управляющего блока ультразвукового генератора, увеличивают амплитуду электрического напряжения до рабочего значения.
Практическая реализация предложенного способа управления может быть пояснена следующим образом.
При включении ультразвукового аппарата в цепи питания ультразвуковой колебательной системы начинает протекать электрический ток, амплитуда которого пропорциональна амплитуде механических колебаний рабочей поверхности излучателя. В случае отсутствия контакта излучателя (режим холостого хода) с участком кожного покрова пациента амплитуда механических колебаний и соответственно амплитуда тока, протекающего по пьезоэлементам ультразвуковой колебательной системы, остаются стабильными.
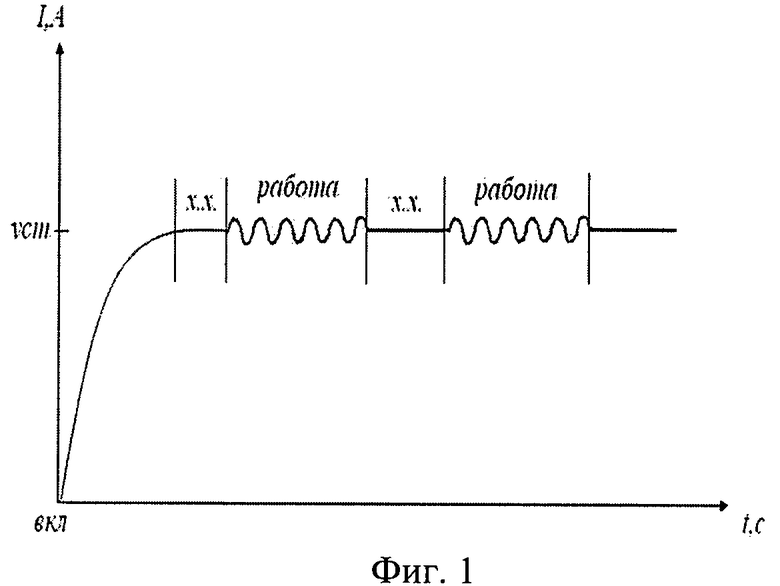
При появлении акустической нагрузки (контакте излучателя с телом пациента, его перемещении) амплитуда механических колебаний рабочей поверхности инструмента изменяется и соответственно изменяется ток, протекающий в цепи питания ультразвуковой колебательной системы, причем характер и глубина амплитудной модуляции зависит от неравномерности прижатия ультразвуковой колебательной системы, усилия ее прижима, скорости перемещения ее по поверхности кожного покрова, волнового сопротивления кожи. Изменение амплитуды электрического тока во времени при различных режимах работы (режимах нагрузки и режимах холостого хода) можно представить, как показано на фиг.1.
При отсутствии акустической нагрузки (режим холостого хода) аппарат продолжает работать с установленной ранее амплитудой колебаний. При этом из-за малого выхода акустической энергии через границу «металл-воздух» ультразвуковая колебательная система начинает быстро разогреваться. Нагрев ультразвуковой колебательной системы крайне нежелателен, поскольку с одной стороны пациент может получить термический ожог, а с другой стороны нагрев излучателя приводит к разогреву пьезокерамических элементов и может привести не только к ухудшению работы колебательной системы, но и к полной или частичной деполяризации пьезоэлементов.
В связи с этим нахождение ультразвукового аппарата в режиме холостого хода в течение длительного времени является нежелательным.
Сущность предлагаемого способа управления процессом внешней липосакции заключается в следующем.
При осуществлении операции липосакции контроль амплитуды механических колебаний излучающей поверхности осуществляется на основании контроля параметра (разницы между полным током и его реактивной составляющей), определяемого только этой амплитудой и не зависящего от других параметров и их изменений. Кроме того, при отсутствии акустической нагрузки мощность УЗ колебаний снижается до уровня, при котором скорость разогрева излучателя снижается вплоть до нуля. В таком режиме аппарат может находиться длительное время. В случае появления акустической нагрузки мощность УЗ колебаний автоматически увеличивается до уровня, заданного ранее, и удерживается в таком состоянии до тех пор, пока на ультразвуковой излучатель воздействует акустическая нагрузка.
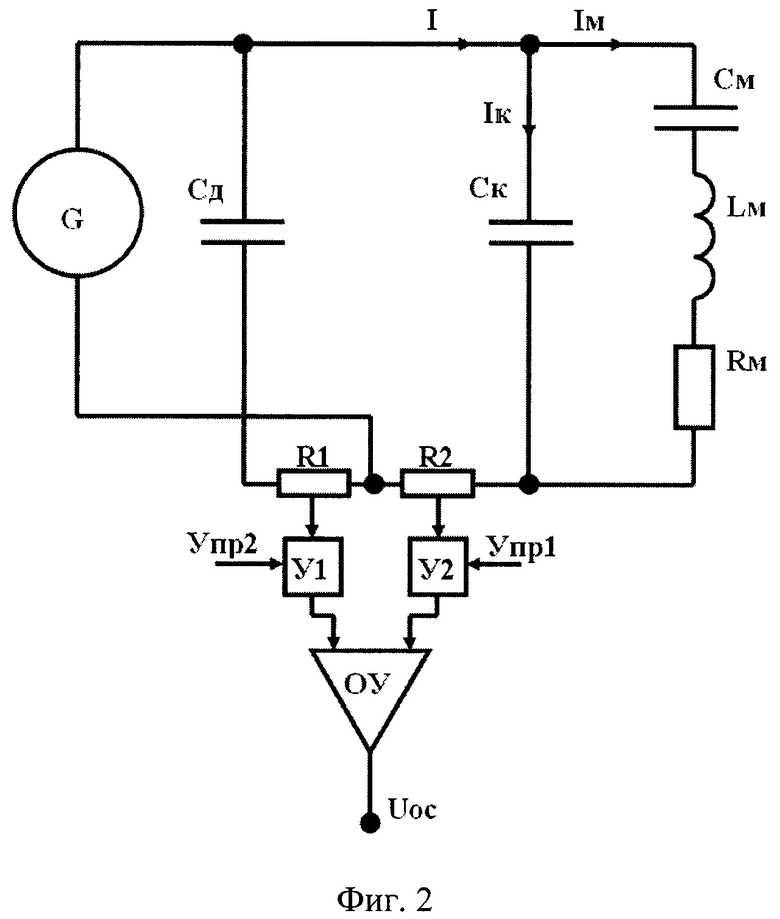
На фиг.2 представлена эквивалентная электрическая схема ультразвуковой колебательной системы с пьезоэлектрическим преобразователем и схема выделения тока механической ветви 1 м ультразвуковой колебательной системы, который является разностью между током I, протекающим через пьезопреобразователь колебательной системы и током Iк, обусловленным наличием электрической емкости пьезоэлементов Ск.
Таким образом, для работы системы автоматической подстройки частоты электронного генератора и точной настройки электронного генератора на резонанс ультразвуковой колебательной системы используют критерий равенства фазы между электрическим напряжением на пьезопреобразователе и током в ветви, образованной последовательно включенными (см. фиг.2) Lм, Cм, Rм (т.е. механической ветвью колебательной системы), так как ФЧХ характеристика тока в ветви Lм, Cм, Rm соответствует ФЧХ ультразвуковой колебательной системы как механической колебательной системы и свободна от влияния изменяющейся емкости пьезокерамических элементов Cк и величины акустической нагрузки Rм.
Контроль амплитуды тока механической ветви ультразвуковой колебательной системы позволяет контролировать процесс ультразвуковой липосакции, понижая амплитуду ультразвукового воздействия или выключая аппарат в случае отсутствия колебаний амплитуды контролируемого тока, т.е. в случае, когда оператор (врач) приостановил перемещение колебательной системы по поверхности тела пациента. В случае, когда оператор возобновляет перемещение колебательной системы по поверхности тела пациента, амплитуда механических колебаний излучателя будет увеличена до рабочей. Это позволяет исключить внутренние ожоги пациента и существенно увеличить ресурс работы аппарата для липосакции.
Выделение амплитуды тока, протекающего через ветвь Lm, Cм, Rм и исключение влияния электрической емкости пьезокерамических элементов на работу системы АПЧ электронного генератора осуществляется при помощи дифференциального усилителя ОУ, при помощи которого выделяется электрический сигнал Uoc, ФЧХ которого соответствует ФЧХ тока в механической ветви Lм, См, Rм (см. фиг.2). Величина добавочной емкости Сд выбирается равной электрической емкости пьезокерамических элементов Ск. Усилители У1 и У2 с управляемым коэффициентом усиления используются для возможности компенсации изменения электрической емкости пьезокерамических элементов в случае их разогрева. Коэффициенты усиления усилителей У1 и У2 подбираются (при помощи сигналов Упр1 и Упр2) таким образом, чтобы при частоте электронного генератора не равной резонансной частоте ультразвуковой колебательной системы (когда Iм=0) сигнал на выходе дифференциального усилителя ОУ был равен нулю, т.е Uoc=0.
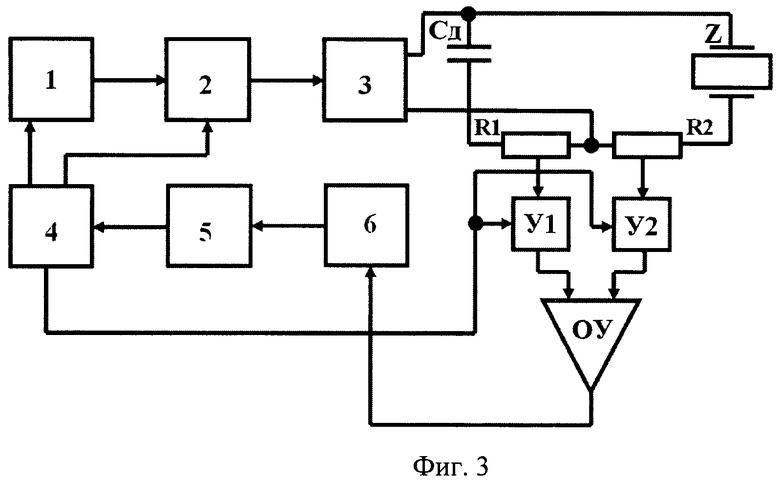
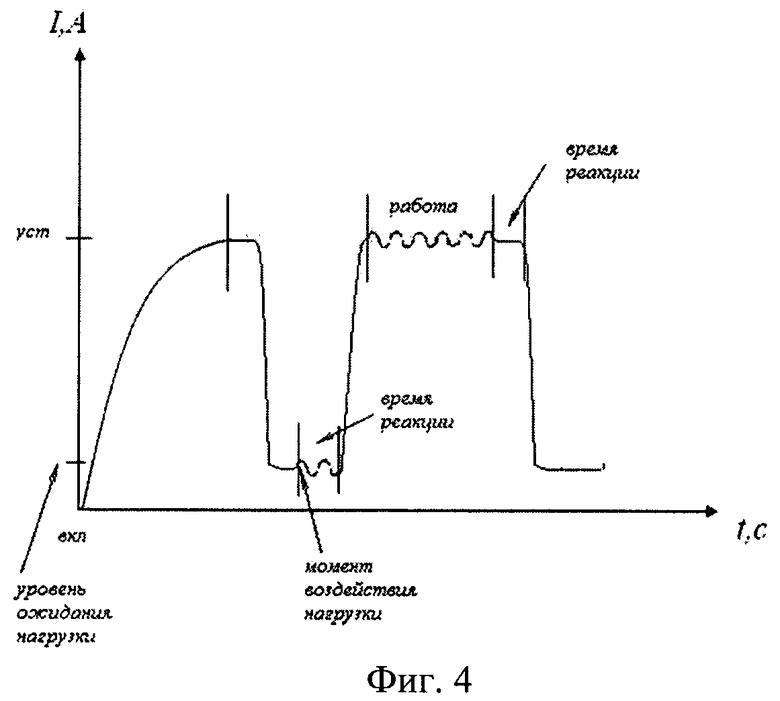
Для практической реализации предлагаемого способа управления процессом внешней липосакции разработана структурная схема аппарата, представленная на фиг.3. Задающий генератор 1 вырабатывает низковольтный сигнал ультразвуковой частоты, который поступает на усилитель 2, где он усиливается до требуемой амплитуды. Сигнал с выхода усилителя через резистивные токовые датчики R1 и R2 поступает на пьезокерамические элементы Z ультразвуковой колебательной системы и добавочную электрическую емкость Сд, через согласующее звено 3. Токовые датчики R1 и R2 используются для измерения величины тока, протекающего через пьезокерамические элементы ультразвуковой колебательной системы и тока, протекающего через емкость Сд. Сигналы с токовых датчиков R1 и R2 через управляемые усилители У1 и У2 поступают на дифференциальный усилитель 7, где выполняется их вычитание друг из друга. Амплитудное значение сигнала, получаемого в результате работы дифференциального усилителя, выделяется при помощи амплитудного детектора 6, которое далее поступает на вход аналого-цифрового преобразователя 5. Оцифрованное амплитудное значение тока механической ветви поступает на микроконтроллер 4, под управлением которого работают все узлы и системы электронного генератора, в частности микроконтроллер управляет напряжением на выходе усилителя 2, от величины которого зависит амплитуда колебаний рабочей поверхности ультразвуковой колебательной системы. При включении ультразвукового генератора на ультразвуковую колебательную систему подается электрическое напряжение, при котором интенсивность ультразвуковых колебаний соответствует уровню, достаточному для проведения процедуры липосакции. В процессе работы ультразвукового аппарата микроконтроллер 4 непрерывно анализирует величину амплитудных модуляций тока механической ветви ультразвуковой колебательной системы. В случае, когда величина амплитудных модуляций тока механической ветви ультразвуковой колебательной системы не превышает 1% от текущей амплитуды в течение, например, 5 секунд, микроконтроллер вырабатывает сигнал на уменьшение напряжения питания излучателя до уровня, при котором он может длительное время работать без существенного нагрева излучателя (энергосберегающий режим). В режиме энергосбережения ультразвуковой генератор находится до тех пор, пока в течение 0.5 секунд и более величина амплитудных модуляций превысит 3% от текущей амплитуды тока механической ветви ультразвуковой колебательной системы. Если величина амплитудных модуляций, превышающих 3% от текущей амплитуды тока, длится в течение более чем 0.5 секунд, микроконтроллер 4 вырабатывает сигнал на увеличение напряжения питания колебательной системы до уровня, необходимого для проведения процедуры липосакции. Далее процесс повторяется. На фиг.4 показано как ведет себя ток механической ветви ультразвуковой колебательной системы при работе разработанной системы.
Таким образом, если оператор непрерывно перемещает ультразвуковую колебательную систему по телу пациента, интенсивность ультразвуковых колебаний максимальна, однако критического разогрева как поверхности тела пациента, так и излучателя не происходит, поскольку тепло, выделяемое в тканях пациента, и тепло, поглощаемое телом пациента, от излучателя путем теплопередачи распределяется на большой поверхности и в большом объеме тела пациента.
В случае, если оператор прекратил перемещение инструмента и удерживает его прижатым к одному участку тела пациента или удерживает инструмент в воздухе в течении времени более чем, например, 5 секунд, интенсивность ультразвуковых колебаний снижается до уровня, не вызывающего разогрев как тела пациента, так и излучателя.
Таким образом, предлагаемый способ управления процессом внешней липосакции способствует повышению интенсивности ультразвуковых колебаний до 2.5 Вт/см2 и более, при этом температура излучателя в процессе его работы не превышает температуры в 45 градусов.
Технический результат предлагаемого технического решения выражается в повышении эффективности ультразвукового воздействия на подкожно-жировую клетчатку за счет увеличения амплитуды излучающей поверхности системы, увеличения энергии УЗ колебаний, вводимых в жировой слой, исключения ожогов пациентов при остановке процедуры, снижения энергозатрат, уменьшения нагрева колебательной системы.
В результате реализации предлагаемого технического решения создан более эффективный аппарат для внешней ультразвуковой липосакции с точки зрения обеспечения максимальной эффективности преобразования энергии электрических колебаний в ультразвуковые, уменьшения нагрева преобразователя и обеспечения безопасности пациентов.
Предложенный способ практически реализован в разработанном ООО «Центр ультразвуковых технологий» аппарате для внешней ультразвуковой липосакции, прошел испытания в лаборатории акустических процессов и аппаратов Бийского технологического института Алтайского государственного технического университета и планируется к передаче в серийное производство после проведения медико-технических испытаний.
Мелкосерийное производство ультразвуковых проточных реакторов планируется начать в 2011 году.
Список литературы, используемой при составлении заявки:
1. Technische Weiterentwicklung und klinische Evaluierung. Michele L., Zocchi, MD, PhD, CLINICS IN PLASTIC SURGERY JAHRGANG 23, NUMMER 4, OKTOBER 1996.
2. Eshel; Yoram (Тель-Авив, Иллинойс), Kushculey; Leonid (Rehovot, Иллинойс), Sverdlik; Ariel (Тель-Авив, Иллинойс), Vitsnudel; Ilia (Даже Yehuda, Иллинойс) Patent US №7331951, 2008 (прототип).
3. Теумин И.И. Ультразвуковые колебательные системы. - М., ГНТИ машиностроительной литературы, 1959.
4. Барсуков Р.В., Хмелев В.Н., Цыганок С.Н., Сливин А.Н, Шалунов А.В. Ультразвуковая колебательная система для пластической хирургии. Патент РФ №2239383, 2004.
5. Хмелев В.Н., Попова О.В. Многофункциональные ультразвуковые аппараты и их применение в условиях малых производств, сельском и домашнем хозяйстве. Монография / Алт. гос. техн. ун-т им И.И.Ползунова - Барнаул: изд. АлтГТУ, 1997, - 168 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ УЛЬТРАЗВУКОВОЙ ЛИПОСАКЦИИ | 2003 |
|
RU2240073C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ УЛЬТРАЗВУКОВОЙ ЛИПОСАКЦИИ | 2003 |
|
RU2247544C1 |
| УЛЬТРАЗВУКОВАЯ КОЛЕБАТЕЛЬНАЯ СИСТЕМА ДЛЯ ПЛАСТИЧЕСКОЙ ХИРУРГИИ | 2002 |
|
RU2239383C2 |
| Способ испытаний кавитационной эрозии | 2020 |
|
RU2739145C1 |
| СПОСОБ КОНТРОЛЯ СВОЙСТВ ЖИДКИХ СРЕД | 2011 |
|
RU2473076C2 |
| СПОСОБ ИЗМЕРЕНИЯ АМПЛИТУДЫ КОЛЕБАНИЙ | 2012 |
|
RU2490607C1 |
| Устройство ультразвукового воздействия на газовые среды | 2024 |
|
RU2838552C1 |
| УЛЬТРАЗВУКОВАЯ КОЛЕБАТЕЛЬНАЯ СИСТЕМА | 2011 |
|
RU2473400C2 |
| СПОСОБ ГЕРМЕТИЗАЦИИ ПЛАСТИКОВЫХ КОНТЕЙНЕРОВ ДЛЯ ХРАНЕНИЯ И ПЕРЕРАБОТКИ КРОВИ | 2004 |
|
RU2269334C1 |
| УЛЬТРАЗВУКОВАЯ КОЛЕБАТЕЛЬНАЯ СИСТЕМА | 2005 |
|
RU2284228C1 |
Изобретение относится к области медицинской ультразвуковой техники, а именно к способам управления процессом внешней липосакции. Способ осуществляют путем непрерывного измерения амплитуды колебаний излучающей поверхности пьезоэлектрической ультразвуковой колебательной системы по величине амплитуды электрического тока в процессе ее перемещения по поверхности тела человека, сравнения амплитуды тока посредством схемы сравнения с амплитудой тока, задаваемой с помощью управляющего блока и корректировки амплитуды электрического напряжения, подаваемого от генератора к пьезопреобразователю колебательной системы. При этом измерение амплитуды колебаний осуществляют по величине амплитуды электрического тока, являющегося разностью между током, протекающим через пьезопреобразователь колебательной системы и реактивной емкостной составляющей этого тока. На пьезопреобразователь колебательной системы подают измеренное в каждый момент времени рабочее напряжение и значение амплитуды колебаний сравнивают со значением амплитуды колебаний, измеренной в предыдущий момент времени. В случае, если изменение амплитуды колебаний за установленный интервал не превышает значения, установленного в памяти управляющего блока ультразвукового генератора, уменьшают амплитуду электрического напряжения до минимального значения. В случае, когда изменение амплитуды колебаний за установленный интервал при подаваемом минимальном электрическом напряжении превышает значение, установленное в памяти управляющего блока ультразвукового генератора, увеличивают амплитуду электрического напряжения до рабочего значения. Использование изобретения позволяет повысить качество операций за счет исключения чрезмерного ультразвукового воздействия на отдельные участки тела и снизить уровень нагрева ультразвуковых колебательных систем аппаратов. 4 ил.
Способ управления процессом внешней ультразвуковой липосакции путем непрерывного измерения амплитуды колебаний излучающей поверхности пьезоэлектрической ультразвуковой колебательной системы по величине амплитуды электрического тока в процессе ее перемещения по поверхности тела человека, сравнения амплитуды тока посредством схемы сравнения с амплитудой тока, задаваемой с помощью управляющего блока и корректировки амплитуды электрического напряжения, подаваемого от генератора к пьезопреобразователю колебательной системы, отличающийся тем, что измерение амплитуды колебаний излучающей поверхности ультразвуковой колебательной системы осуществляют по величине амплитуды электрического тока, являющегося разностью между током, протекающим через пьезопреобразователь колебательной системы и реактивной емкостной составляющей этого тока, подают на пьезопреобразователь колебательной системы измеренное в каждый момент времени рабочее напряжение, значение амплитуды колебаний сравнивают со значением амплитуды колебаний, измеренной в предыдущий момент времени, и в случае, если изменение амплитуды колебаний за установленный интервал не превышает значения, установленного в памяти управляющего блока ультразвукового генератора, уменьшают амплитуду электрического напряжения до минимального значения, а в случае, когда изменение амплитуды колебаний за установленный интервал при подаваемом минимальном электрическом напряжении превышает значение, установленное в памяти управляющего блока ультразвукового генератора, увеличивают амплитуду электрического напряжения до рабочего значения.
| US 2005261584 A1, 24.11.2005 | |||
| СУДОВОЕ ПЕРЕКРЫТИЕ (ВАРИАНТЫ) | 2006 |
|
RU2303552C1 |
| WO 8705793 A1, 08.10.1987 | |||
| EP 1844750 A1, 17.10.2007 | |||
| WO 2009083902 A2, 09.07.2009 | |||
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ УЛЬТРАЗВУКОВОЙ ЛИПОСАКЦИИ | 2003 |
|
RU2247544C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ УЛЬТРАЗВУКОВОЙ ЛИПОСАКЦИИ | 2003 |
|
RU2240073C1 |

