ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Эта заявка испрашивает приоритет европейской заявки на патент №18180590.4, поданной 28 июня 2018 г., все раскрытие которой включено сюда путем ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к летательному аппарату с вертикальным взлетом и посадкой на хвостовое оперение («тейлситтер»).
УРОВЕНЬ ТЕХНИКИ
С середины 20 века в авиационной промышленности осознавали необходимость в летательных аппаратах, способных осуществлять вертикальный взлет и посадку, имея достаточно высокие крейсерские скорости, чтобы быть способными быстро преодолевать маршруты на средние/дальние расстояния.
Частичное решение этой необходимости представлено вертолетами и конвертопланами, которые, однако, не лишены недостатков.
Вертолеты фактически имеют максимальную скорость приблизительно 350 км/ч. Конвертопланы требуют вращения гондол с винтами между вертолетной конфигурацией и самолетной конфигурацией, тем самым являясь особенно сложными с конструктивной точки зрения.
Дополнительное решение, предложенное для удовлетворения этой необходимости, представлено летательными аппаратами VTOL (вертикального взлета и посадки). Они имеют конфигурацию взлета/посадки с горизонтальным фюзеляжем и двигателями, способными ориентировать тягу в вертикальном направлении во время взлета/посадки или в горизонтальном направлении во время горизонтального поступательного полета.
Несмотря на их широкое использование и их эффективность, конструктивная конфигурация летательных аппаратов VTOL является особенно сложной. Это проистекает из того, что необходимо выборочно ориентировать направление тяги двигателей согласно режимам взлета/посадки/полета летательного аппарата.
Дополнительное решение, предложенное для удовлетворения вышеупомянутой необходимости, было разработано между сороковыми и шестидесятыми годами 20 века и представлено тейлситтерами.
Эти летательные аппараты в своей основе содержат фюзеляж, пару полукрыльев, один или более приводных элементов, обычно опирающихся на фюзеляж, и хвостовое оперение, оборудованное подвижными поверхностями для управления летательным аппаратом.
Профиль полета тейлситтера предполагает взлет с фюзеляжем летательного аппарата, расположенным вертикально, фазу первого перехода, в которой летательный аппарат поворачивается на 90 градусов для принятия крейсерского положения, и фазу второго перехода, в которой летательный аппарат возвращается к вертикальному расположению фюзеляжа для выполнения посадки.
Во время фаз взлета и посадки тейлситтер опирается на землю посредством посадочных элементов, в общем опирающихся на хвостовое оперение летательного аппарата.
Следовательно, тяга двигателей противодействует весу тейлситтера в режимах взлета/посадки и аэродинамическому сопротивлению в режимах полета.
Прототипы этих решений представлены летательным аппаратом Lockheed XFV-1, Convair XFY-1 Pogo и Ryan X-13 Vertijet.
US 1,665,114, US-2017/0297699, CN-A-106938701, US-A-2017/0166305, WO-A-2016/209350 и US-B-5,114,096 описывают известные решения тейлситтеров.
Тейлситтеры особенно предпочтительны, так как они имеют конфигурацию, по существу аналогичную конфигурации самолетов, и в связи с этим являются особенно простыми для конструирования по сравнению с конфигурацией конвертопланов и летательного аппарата VTOL.
Кроме того, в отличие от вертолетов тейлситтеры не имеют особых ограничений относительно максимальной крейсерской скорости, которая сравнима со скоростью традиционных самолетов.
Тем не менее положение вертикального взлета и посадки тейлситтеров налагает геометрические и эксплуатационные ограничения на форму полукрыльев, особенно когда вес тейлситтера превышает определенное пороговое значение. Например, необходимо минимизировать поверхность полукрыла, подвергающегося воздействию ветра, так, чтобы минимизировать чувствительность к порывам ветра во время фаз взлета и посадки.
Следовательно, производительность тейлситтеров в крейсерском положении ухудшается из-за конфигурации этих полукрыльев.
Это по существу препятствовало эффективному использованию тейлситтеров. На самом деле большинство ранее упомянутых прототипов никогда не приводили к фактически введенным в эксплуатацию летательным аппаратам. Следовательно, от использования тейлситтеров отказывались по существу в течение последних пятидесяти лет в основном в пользу летательного аппарата VTOL.
Для того чтобы увеличивать аэродинамическую эффективность тейлситтеров в крейсерских режимах был предложен летательный аппарат, описанный в US-A-2017/0166305.
Этот летательный аппарат в своей основе содержит:
- фюзеляж;
- пару первых двигателей, расположенных выше фюзеляжа; и
- пару вторых двигателей, расположенных ниже фюзеляжа.
В первом варианте выполнения летательного аппарата, описанного в US-A-2017/0166305, летательный аппарат содержит пару плоских полукрыльев, выступающих с соответственных взаимно противоположных боковых сторон фюзеляжа.
В этом первом варианте выполнения первые двигатели прикреплены к соответственным верхним поверхностям полукрыльев с помощью соответственных первых опорных конструкций, выступающих консольным образом выше полукрыльев, а вторые двигатели прикреплены к соответственным нижним поверхностям полукрыльев с помощью соответственных вторых опорных конструкций, выступающих консольным образом ниже полукрыльев.
Конкретнее, полукрылья имеют конечную длину и являются плоскими. Оси первых и вторых двигателей разнесены в отношении контура полукрыльев и соответственно расположены выше и ниже этого профиля.
Во втором варианте выполнения летательный аппарат, описанный в US-A-2017/0166305, содержит:
- первые полукрылья, опущенные книзу и выступающие консольным образом с взаимно противоположных боковых сторон фюзеляжа; и
- вторые полукрылья, поднятые кверху, более короткие, чем первые полукрылья, и выступающие консольным образом с соответственных взаимно противоположных боковых сторон фюзеляжа.
Первые двигатели расположены ниже фюзеляжа и прикреплены к нижним поверхностям соответственных первых полукрыльев с помощью соответственных третьих опорных конструкций.
Вторые двигатели расположены на свободных концах вторых полукрыльев.
Конкретнее, первые и вторые полукрылья имеют конечную длину и являются плоскими. Оси первых и вторых двигателей разнесены в отношении профиля соответственных первых полукрыльев и соответственно расположены выше и ниже этого профиля.
За счет того, что оси первых и вторых двигателей разнесены в отношении полукрыльев, летательный аппарат, описанный в US-A-2017/0166305, таким образом реализует конфигурацию RBW (крыло с обдувом от винтов), в которой в полукрылья попадают воздушные потоки, создаваемые первыми и вторыми двигателями.
Эта конфигурация позволяет увеличивать подъемную силу полукрыла посредством отклонения струи воздуха по направлению к полукрыльям, создавая избыточное давление на нижней поверхности полукрыльев и пониженное давление на верхней поверхности полукрыльев с последующим увеличением подъемной силы, создаваемой полукрыльями.
Наличие опорных конструкций и, со ссылкой только на второй вариант выполнения, наличие первых и вторых полукрыльев, выступающих консольным образом из фюзеляжа, делает конфигурацию летательного аппарата, описанного в US-A-2017/0166305, особенно сложной для конструирования.
В отрасли осознают необходимость иметь тейлситтеры, оборудованные аэродинамически эффективными конструкциями крыльев так, чтобы увеличивать производительность в крейсерских режимах и в то же время имея самую простую из возможных конфигурацию.
EP-A-3263445 раскрывает тейлситтер согласно ограничительной части пункта 1 формулы изобретения.
US-A-2017/0158327 раскрывает беспилотный летательный аппарат с узлами пластинообразных крыльев, предоставляющими возможность эффективного вертикального взлета и посадки.
DE-U-202017104421 раскрывает беспилотный летательный аппарат, содержащий: основной корпус; неподвижное крыло, закрепленное с обеих сторон основного корпуса; группу винтов, соединенных с обеими сторонами неподвижного крыла соответственными опорными элементами винта; систему бортовых датчиков для сбора полетных данных летательного аппарата; и систему управления полетом, соединенную с системой бортовых датчиков для регулирования состояний неподвижного крыла и/или винтов и дальнейшего состояния полета летательного аппарата на основе полетных данных.
DE-A-102011012503 раскрывает сверхлегкий летательный аппарат для транспортировки грузов, содержащий четырехугольный фюзеляж, группу индивидуально управляемых винтов, расположенных на фюзеляже, и коробчатое крыло.
US-A-2016/0144957 раскрывает высокоскоростной многовинтовой летательный аппарат с вертикальным взлетом и посадкой.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является предоставление тейлситтера, который позволяет удовлетворять вышеупомянутую необходимость простым и недорогим образом.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеупомянутая задача решается с помощью настоящего изобретения, которое заявлено в пункте 1 формулы изобретения.
Для лучшего понимания настоящего изобретения ниже будет описан один предпочтительный вариант выполнения исключительно посредством неограничивающего примера и со ссылкой на сопровождающие чертежи, на которых:
- Фигура 1 представляет собой вид в перспективе варианта выполнения тейлситтера, показанного только в иллюстративных целях, в положении взлета/посадки;
- Фигура 2 представляет собой вид в перспективе тейлситтера на Фигуре 1 в крейсерском положении;
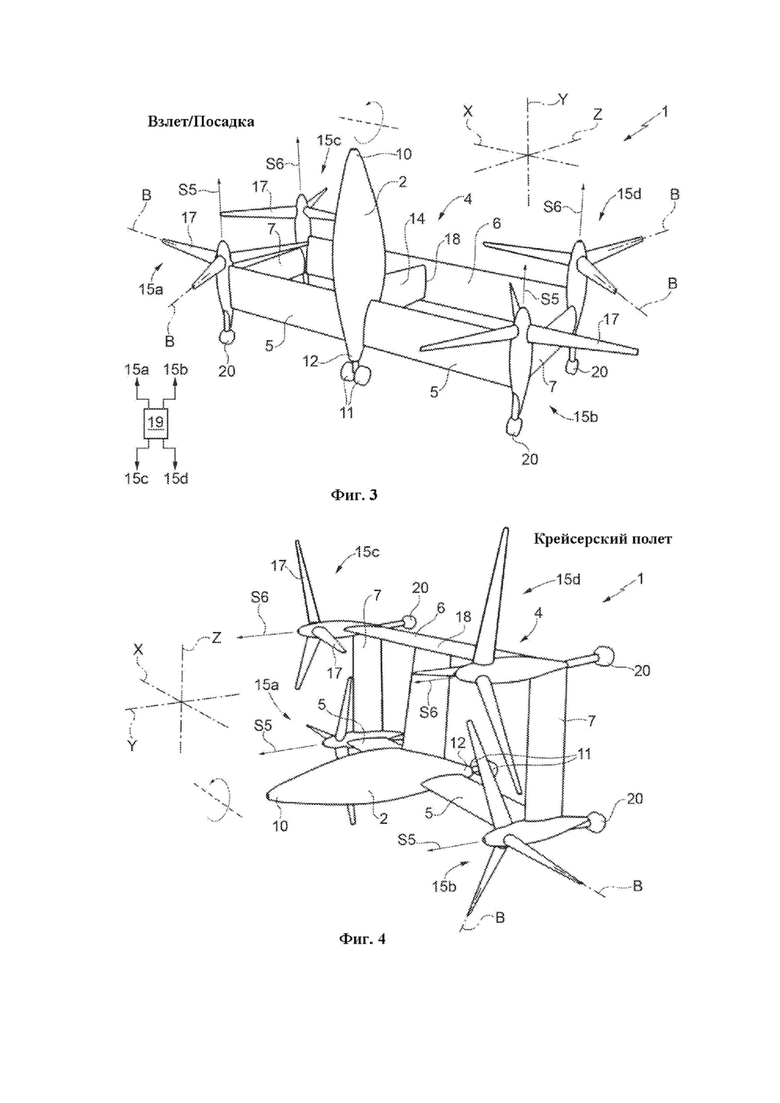
- Фигуры 3 и 4 представляют собой виды в перспективе тейлситтера на Фигурах 1 и 2 во время выполнения первого маневра и соответственно в положении взлета/посадки и в крейсерском положении;
- Фигуры 5 и 6 представляют собой виды в перспективе тейлситтера на Фигурах 1 и 2 во время выполнения второго маневра и соответственно в положении взлета/посадки и в крейсерском положении;
- Фигуры 7 и 8 представляют собой виды в перспективе тейлситтера на Фигурах 1 и 2 во время выполнения третьего маневра и соответственно в положении взлета/посадки и в крейсерском положении; и
- Фигура 9 представляет собой вид в перспективе варианта выполнения тейлситтера, изготовленного согласно замыслам настоящего изобретения.
НАИЛУЧШИЙ ВАРИАНТ ВЫПОЛНЕНИЯ ИЗОБРЕТЕНИЯ
Со ссылкой на Фигуры 1 и 2 ссылочная позиция 1 обозначает тейлситтер, показанный только в иллюстративных целях.
Летательный аппарат 1 содержит фюзеляж 2.
Возможно идентифицировать набор из трех осей, выполненных за одно целое с летательным аппаратом 1, имеющих начало в центре тяжести летательного аппарата 1 и образованных:
- осью Y, параллельной направлению продолжения фюзеляжа 2;
- осью X, перпендикулярной оси Y; и
- осью Z, перпендикулярной осям X-Y.
Летательный аппарат 1 может принимать крейсерское положение (показанное на Фигуре 2) известным образом. В этом крейсерском положении ось Y наклонена в отношении вертикального направления. В частности, в случае полета вперед на постоянной высоте ось Y расположена горизонтально.
Выражение «крейсерское положение» используется в этом описании для обозначения конфигурации полета, в которой летательный аппарат 1 движется со скоростью, имеющей по меньшей мере горизонтальную составляющую полета.
В этом крейсерском положении летательного аппарата 1 повороты летательного аппарата 1 вокруг осей X-Y-Z связаны со следующими маневрами:
- крен, а именно поворот вокруг оси Y (Фигура 6);
- тангаж, а именно поворот вокруг оси X (Фигура 4);
- рыскание, а именно поворот вокруг оси Z (Фигура 8).
Летательный аппарат 1 также может принимать положение взлета/посадки, показанное на Фигуре 1, где ось Y расположена вертикально.
В этом положении взлета/посадки повороты летательного аппарата 1 вокруг осей X-Y-Z связаны со следующими маневрами:
- крен, а именно поворот вокруг оси Z (Фигура 5);
- тангаж, а именно поворот вокруг оси X (Фигура 3); и
- рыскание, а именно поворот вокруг оси Y (Фигура 7).
Профиль полета летательного аппарата 1 позволяет первый переход из положения взлета в крейсерское положение, поддержание крейсерского положения и второй переход из крейсерского положения в положение посадки.
Летательный аппарат 1 содержит крыло 4 с замкнутой передней секцией C, которое продолжается из фюзеляжа 2.
В этом описании термин «крыло с замкнутой передней секцией» означает неплоское крыло, замкнутое само на себе и без свободных концов.
Замкнутая передняя секция C образована выступом крыла 4 на плоскости, перпендикулярной оси Y.
Более подробно, крыло 4 в своей основе содержит:
- пару полукрыльев 5, выступающих консольным образом с соответственных взаимно противоположных сторон фюзеляжа 2;
- участок 6, расположенный выше полукрыльев 5 в положении полета на постоянной высоте летательного аппарата 1; и
- пару соединительных секций 7, каждая из которых продолжается между соответственными свободными концами 8 полукрыльев 5 и соответственными свободными концами 9 участка 6.
В показанном случае участок 6 и полукрылья 5 параллельны друг другу.
Полукрылья 5 и участок 6 имеют направление продолжения в основном вдоль оси X.
В показанном случае общая длина полукрыльев 5 вдоль оси X равна длине участка 6 вдоль оси X.
В показанном случае полукрылья 5 и участок 6 также являются прямыми с постоянной хордой, нулевой стреловидностью крыла и нулевым двугранным углом.
Секции 7 параллельны друг другу и продолжаются вдоль оси Z, перпендикулярной осям X-Y.
Летательный аппарат 1 также содержит дополнительную соединительную секцию 14, продолжающуюся между фюзеляжем 2 и срединной секцией 18 участка 6.
В частности, секция 14 продолжается вдоль направления Z параллельно и по центру между секциями 7.
В показанном случае и со ссылкой на крейсерское положение летательного аппарата 1 участок 6 расположен выше полукрыльев 5.
Фюзеляж 2 также содержит пару посадочных элементов 11, расположенных на хвостовой части 12 фюзеляжа 2.
Крыло 4 также поддерживает:
- группу, четыре в показанном случае, двигателей 15a, 15b, 15c и 15d, опирающихся на крыло 4; и
- группу посадочных элементов 20, которые опираются на землю, когда летательный аппарат 1 находится в положении взлета/посадки.
Каждый двигатель 15a, 15b, 15c и 15d содержит в частности:
- втулку 16 (обозначенную только на Фигурах 1 и 2), вращающуюся вокруг соответственной оси А, параллельной оси Y, и приводимую во вращение приводным элементом, который не показан; и
- группу лопастей 17, выступающих консольным образом из втулки 16 вдоль соответственных осей B.
В частности, лопасти 17 вращаются за одно целое с втулкой 16 вокруг соответственной оси А.
Втулки 16 двигателей 15a, 15b, 15c и 15d вращаются вокруг их соответственных осей A в отличных друг от друга направлениях вращения.
Оси втулок 16 двигателей 15a, 15b, 15c и 15d попадают на переднюю секцию C крыла 4.
Другими словами, оси A расположены вдоль передней секции C крыла 4.
Оси A втулок 16 двигателей 15a и 15b попадают на переднюю секцию C на соответственных полукрыльях 5.
Оси A втулок 16 двигателей 15c и 15d попадают на переднюю секцию C на участке 6 крыла 4.
Конкретнее, оси A втулок 16 двигателей 15a, 15b, 15c и 15d расположены в углах пересечения между полукрыльями 5 и секциями 7 и между секциями 7 и участком 6.
В частности, оси A втулок 16 двигателей 15a и 15b расположены в углах пересечения между полукрыльями 5 и секциями 7, т.е. на концах 8 соответственных полукрыльев 5.
Оси A втулок 16 двигателей 15c и 15d расположены в углах пересечения между секциями 7 и участком 6, т.е. на концах 9 участка 6.
Двигатели 15a и 15c и двигатели 15b и 15d расположены с соответственных взаимно противоположных боковых сторон со ссылкой на срединную плоскость фюзеляжа 2 параллельно осям Y-Z и перпендикулярно оси X.
Двигатель 15c расположен выше двигателя 15a, а двигатель 15d расположен выше двигателя 15b со ссылкой на крейсерский режим летательного аппарата 1 (Фигура 1).
В частности, двигатели 15a и 15d могут вращаться в первом направлении вращения, например, по часовой стрелке (против часовой стрелки). Двигатели 15b и 15c могут вращаться во втором направлении вращения, например, против часовой стрелки (по часовой стрелке).
В показанном случае летательный аппарат 1 содержит блок 19 управления (только схематически показанный на Фигурах 1, 3, 5 и 7), запрограммированный с возможностью регулировки, независимо друг от друга, угловой скорости двигателей 15a, 15b, 15c и 15d вокруг их соответственных осей A вращения и угла общего шага лопастей 17 в отношении воздушного потока.
Таким образом, блок 19 управления запрограммирован с возможностью регулировки тяги, создаваемой соответственными двигателями 15a, 15b, 15c и 15d независимо друг от друга.
Лопасти 17 выступают консольным образом из крыла 4 на стороне по направлению к носовой части 10 фюзеляжа 2.
Циклический шаг лопастей 17 каждого двигателя 15a, 15b, 15c и 15d фиксирован.
Посадочные элементы 20 расположены в углах пересечения между полукрыльями 5 и секциями 7 и между секциями 7 и участком 6.
Посадочные элементы 20 выступают из крыла 4 на стороне по направлению к хвостовой части 12 фюзеляжа 2.
В показанном случае имеются четыре посадочных элемента 20.
Летательный аппарат 1 не имеет хвостового оперения или дополнительных подвижных конструкций крыла, отличных от крыла 4.
Другими словами, движения крена, тангажа и рыскания летательного аппарата 1 исключительно управляются путем регулирования тяги двигателей 15a, 15b, 15c и 15d и работы элеронов.
Летательный аппарат 1 может представлять собой дрон, снабженный подходящим оборудованием на фюзеляже 2.
Альтернативно фюзеляж 2 может вмещать экипаж.
В дополнительном варианте выполнения, который не показан, летательный аппарат 1 может не содержать фюзеляж 2 и быть образован только крылом 4 и, если необходимо, датчиком, например, антенной, расположенной на крыле 4.
Описана работа летательного аппарата 1, начиная с режима взлета (Фигура 1), в котором ось Y фюзеляжа 2 расположена вертикально, а посадочные элементы 11 и 20 поддерживают летательный аппарат 1 на земле.
Работа двигателей 15a, 15b, 15c и 15d заставляет летательный аппарат 1 отрываться от земли. В этой фазе двигатели 15a, 15b, 15c и 15d противодействуют и преодолевают влияние веса летательного аппарата 1, позволяя отрываться от земли.
Затем летательный аппарат 1 выполняет первый переход, в конце которого он достигает крейсерского положения, в котором ось Y фюзеляжа 2 наклонена в отношении вертикального направления и, в случае полета на постоянной высоте, является по существу горизонтальной.
В этой фазе двигатели 15a, 15b, 15c и 15d противодействуют сопротивлению воздуха, а крыло 4 создает подъемную силу, необходимую для поддержания летательного аппарата 1 в полете.
Позже летательный аппарат 1 выполняет второй переход, в конце которого он достигает положения посадки, полностью аналогичного положению взлета. В этом положении посадки ось Y фюзеляжа 2 параллельна вертикальному направлению, а двигатели 15a, 15b, 15c и 15d противодействуют влиянию веса летательного аппарата 1, позволяя постепенное приближение к земле.
Высота летательного аппарата 1 постепенно уменьшается до тех пор, пока посадочные элементы 20 не обопрутся на землю, тем самым приводя к завершению маневра посадки.
Во время вышеупомянутых фаз полета летательный аппарат 1 управляется следующим образом.
Наклон относительно оси Y получается и управляется путем установки первых значений S1 тяги на двигателях 15a и 15d и вторых значений S2 тяги, отличных от S1, на двигателях 15b и 15c так, чтобы получать крутящий момент, параллельный оси Y, воздействующий на летательный аппарат 1 (Фигуры 6 и 7).
Поворот летательного аппарата 1 вокруг оси Y соответствует маневру крена в крейсерском положении (Фигура 6) и маневру рыскания в положении взлета/посадки (Фигура 7).
Важно отметить, что, когда тяга S1 винтов 15a и 15d увеличивается, тяга S2 двигателей 15b и 15c уменьшается на это же значение. Таким образом, получающаяся в результате общая тяга на летательном аппарате 1 не изменяется, при этом вокруг оси Y создается крутящий момент, который вызывает поворот летательного аппарата 1 вокруг оси Y.
Кроме того, наклон относительно оси Z получается и управляется путем установки первых значений S3 тяги на двигателях 15a и 15c и вторых значений S4 тяги, отличных от S3, на двигателях 15b и 15d, так, чтобы получать крутящий момент, параллельный оси Z, воздействующий на летательный аппарат 1 (Фигуры 5 и 8).
Поворот летательного аппарата 1 вокруг оси Z соответствует маневру рыскания в крейсерском положении (Фигура 8) и маневру крена в положении взлета/посадки (Фигура 5).
Наклон летательного аппарата 1 относительно оси X получается и управляется путем установки первых значений S5 тяги на двигателях 15a и 15b и вторых значений S6 тяги, отличных от S5, на двигателях 15c и 15d так, чтобы получать крутящий момент, параллельный оси X, воздействующий на летательный аппарат 1 (Фигуры 3 и 4).
Поворот летательного аппарата 1 вокруг оси X соответствует маневру тангажа как в крейсерском положении (Фигура 4), так и в положении взлета/посадки (Фигура 3).
Со ссылкой на Фигуру 9 ссылочная позиция 1' обозначает тейлситтер согласно варианту выполнения настоящего изобретения.
Летательный аппарат 1' аналогичен летательному аппарату 1 и будет описан ниже только в отношении отличий; там, где это возможно, идентичные и соответствующие части летательного аппарата 1' и летательного аппарата 1 будут обозначены одинаковыми ссылочными позициями.
В частности, летательный аппарат 1' отличается от летательного аппарата 1 тем, что крыло 4 содержит дополнительный участок 30, расположенный ниже полукрыльев 5 со ссылкой на крейсерское положение летательного аппарата 1.
Участок 30 и полукрылья 5 соединены секциями 31 на соответственных свободных концах 32 и 8. В дополнение, центральная секция участка 30 соединена с фюзеляжем 2 секцией 33, расположенной между секциями 31 вдоль оси X. Секции 31 и 33 продолжаются параллельно оси Z.
Участок 30 снабжен дополнительными посадочными элементами 20.
Работа летательного аппарата 1' аналогична работе летательного аппарата 1 и в связи с этим не описана подробно.
Из исследования характеристик тейлситтера 1' очевидны преимущества, которые могут быть получены с его помощью.
В частности, двигатели 15c и 15d разнесены в отношении двигателей 15a и 15b параллельно оси Z, а оси A двигателей 15a, 15b, 15c и 15d попадают на переднюю секцию C крыла 4.
Это означает, что, с одной стороны, возможно увеличивать аэродинамическую эффективность летательного аппарата 1' в крейсерском положении за счет большей аэродинамической эффективности формы крыла 4, выполненного с возможностью поддержания двигателей 15c и 15d в разнесенном положении в отношении двигателей 15a и 15b вдоль оси Z.
С другой стороны, поскольку оси A попадают на переднюю секцию C, возможно исключать опорные конструкции и дополнительные полукрылья, имеющиеся в известных решениях и рассмотренные во вводной части этого описания.
Таким образом, возможно достигать высокой производительности в крейсерских режимах с конфигурацией летательного аппарата 1, 1', которая является особенно простой для получения в отношении известных решений, рассмотренных во вводной части этого описания.
На самом деле, в отличие от вышеупомянутых известных решений, увеличение аэродинамической эффективности крыла 4 не достигается путем разнесения осей двигателей от передней секции C крыла 4 так, чтобы отклонять воздушный поток путем создания дополнительного градиента давления на крыле.
Наоборот, увеличение аэродинамической эффективности крыла 4 достигается путем придания крылу 4 двумерной или даже замкнутой формы.
В дополнение, летательный аппарат 1' не требует наличия хвостовых оперений для гарантирования продольной устойчивости. Фактически летательный аппарат 1' даже не требует наличия переднего оперения или поверхностей крыла хвостовой части, позволяя гарантировать продольную устойчивость с помощью относительного расположения и профилей крыла полукрыльев 5 и участка 6. Это позволяет дополнительное уменьшение сложности и веса летательного аппарата 1'.
Управление поворотом вокруг осей X-Y-Z в крейсерском положении и положении взлета/посадки достигается путем простого управления тягой S5, S6, S1, S2, S3 и S4 двигателей 15a, 15b, 15c и 15d дифференциальным образом.
Двигатели 15a, 15b, 15c и 15d и посадочные элементы 20 опираются на крыло 4. Это означает, что в случае, когда летательный аппарат 1' является беспилотным, возможно уменьшать фюзеляж 2 до минимума или даже исключать его, получая особенно легкий летательный аппарат 1' уменьшенной сложности.
Наконец, в случае, когда летательный аппарат 1' является беспилотным, он может даже не содержать фюзеляж 2. В этих обстоятельствах летательный аппарат 1' будет образован по существу крылом 4 и любым оборудованием, например, антенной или датчиком или грузом, установленным на борту крыла 4.
Все двигатели 15a, 15b, 15c и 15d опираются на крыло 4. Следовательно, фюзеляж 2 не подвергается непосредственному влиянию вибраций, создаваемых дополнительными двигателями, установленными непосредственно на нем.
В случае, когда фюзеляж 2 вмещает экипаж, это позволяет повысить удобство экипажа. Наоборот, в случае, когда фюзеляж 2 вмещает только датчики или оборудование, это позволяет сделать положение датчиков и оборудования более устойчивым в течение некоторого времени.
В результате того, что было указано выше, летательный аппарат 1' позволяет делать конструктивное решение тейлситтера пригодным для использования, преодолевая многочисленные недостатки, которые препятствовали его разработке.
Это еще более предпочтительно, если летательный аппарат 1' является беспилотным. На самом деле в этих обстоятельствах летательный аппарат 1' даже не имеет неизбежного недостатка тейлситтеров, требующих особенно неудобных положений экипажа во время маневров взлета/посадки.
Наконец, ясно, что могут быть выполнены модификации и варианты тейлситтера 1', описанного и проиллюстрированного здесь, без отклонения от объема охраны, определенного в приложенной формуле изобретения.
В частности, крыло 4 может иметь форму, подобную кольцу, ромбу или многоугольнику.
Кроме того, одно крыло 4 может иметь открытую двумерную переднюю секцию C, например, С-образную переднюю секцию.




Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов вертикального взлета и посадки. Летательный аппарат-тейлситтер (1’) содержит фюзеляж (2), расположенный вертикально в положении взлета/посадки и поперечно вертикальному направлению в крейсерском положении летательного аппарата, крыло (4), два первых двигателя (15a, 15b), выполненных с возможностью приложения соответственных первых тяг, направленных вдоль соответственных первых осей (A), к тейлситтеру и два вторых двигателя (15c, 15d), вращающихся вокруг соответственных вторых осей (A), расположенных выше указанных первых осей (A) первых двигателей (15a, 15b) при крейсерском положении. Первые и вторые двигатели опираются на одно крыло. Крыло содержит первый участок (5) и второй участок (6), взаимно разнесенные друг от друга. Второй участок расположен выше указанного первого участка (5) при крейсерском положении. Первый участок (5) содержит два полукрыла, продолжающихся с противоположных боковых сторон фюзеляжа. Крыло дополнительно содержит третий участок (30), расположенный ниже указанного первого участка (5) при крейсерском положении летательного аппарата. Обеспечивается аэродинамическая эффективность конструкции, увеличение производительности в крейсерских режимах. 3 н. и 10 з.п. ф-лы, 9 ил.
1. Летательный аппарат-тейлситтер (1'), включающий
фюзеляж (2), расположенный, при использовании, вертикально в положении взлета/посадки указанного летательного аппарата (1');
одно крыло (4);
по меньшей мере два первых двигателя (15a, 15b), выполненных с возможностью приложения, при использовании, соответственных первых тяг (S1, S5, S3; S2, S5, S4), направленных вдоль соответственных первых осей (A), к указанному тейлситтеру (1, 1'); и
по меньшей мере два вторых двигателя (15c, 15d), вращающихся вокруг соответственных вторых осей (A), расположенных выше указанных первых осей (A) указанных первых двигателей (15a, 15b) со ссылкой на указанное крейсерское положение; при этом указанные по меньшей мере два вторых двигателя (15c, 15d) выполнены с возможностью приложения, при использовании, соответственных вторых тяг (S2, S6, S3; S1, S6, S4), направленных вдоль соответственных вторых осей (A), к указанному тейлситтеру (1');
при этом указанные первые и вторые двигатели (15a, 15b; 15c, 15d) опираются на указанное одно крыло (4);
при этом указанное одно крыло (4) содержит первый участок (5) и второй участок (6), взаимно разнесенные друг от друга;
при этом указанный второй участок (6) расположен, при использовании, выше указанного первого участка (5) со ссылкой на указанное крейсерское положение указанного летательного аппарата (1');
при этом указанный первый участок (5) содержит два полукрыла (5), которые продолжаются с противоположных боковых сторон указанного фюзеляжа (2);
при этом указанный фюзеляж (2) расположен, при использовании, поперечно вертикальному направлению в крейсерском положении указанного летательного аппарата (1');
при этом указанное крыло (4) дополнительно содержит третий участок (30), расположенный, при использовании, ниже указанного первого участка (5) со ссылкой на указанное крейсерское положение указанного летательного аппарата (1');
отличающийся тем, что указанное одно крыло (4) содержит
первую и вторую соединительные секции (7), которые расположены между соответственными концами (8, 9) указанного первого участка (5) и указанного второго участка (6).
2. Летательный аппарат по п. 1, отличающийся тем, что указанные первые двигатели (15a, 15b) расположены на соответственных первых концах (8) указанного первого участка (5);
при этом указанные вторые двигатели (15c, 15d) расположены на соответственных вторых концах (9) указанного второго участка (6).
3. Летательный аппарат по любому из пп. 1 или 2, отличающийся тем, что указанное крыло (4) имеет замкнутую переднюю секцию (C);
при этом указанное крыло (4) представляет собой неплоское крыло, замкнутое само на себе и без свободных концов; при этом указанная передняя секция (C) образована выступом указанного крыла (4) на плоскости, перпендикулярной третьей оси (Y), параллельной направлению продолжения указанного фюзеляжа (2).
4. Летательный аппарат по п. 3, отличающийся тем, что указанный третий участок (30) и указанный первый участок (5) соединены первыми секциями (31) на соответственных концах (32, 8).
5. Летательный аппарат по п. 4, отличающийся тем, что центр указанного участка (30) соединен с указанным фюзеляжем (2) второй секцией (33), расположенной между первыми секциями (31) вдоль четвертой оси (X); указанная первая и вторая секции (31, 33) продолжаются параллельно пятой оси (Z), перпендикулярной указанной четвертой оси (X).
6. Летательный аппарат по любому из предыдущих пунктов, отличающийся тем, что представляет собой дрон, или тем, что указанный фюзеляж (2) выполнен с возможностью вмещения экипажа.
7. Летательный аппарат по любому из предыдущих пунктов, отличающийся тем, что каждый из указанных первых двигателей (15a, 15b) содержит соответствующую втулку (16), вращающуюся вокруг соответствующей первой оси (A), и группу лопастей (17), продолжающихся консольным образом от указанной втулки (16) и имеющих соответственные углы шага;
при этом указанный летательный аппарат (1') дополнительно включает блок (19) управления, запрограммированный с возможностью регулирования указанной угловой скорости указанной втулки (16) и указанных углов шага указанных лопастей (17) каждых первых и вторых двигателей (15a, 15b, 15c, 15d) независимо от углов шага указанных лопастей (17) и скорости вращения указанной втулки (16) остальных указанных первых и вторых двигателей (15a, 15b; 15c, 15d); при этом указанный циклический шаг указанных лопастей (7) является фиксированным.
8. Летательный аппарат по п. 7, отличающийся тем, что блок (19) управления запрограммирован, в случае, когда необходимо поворачивать указанный летательный аппарат (1') вокруг указанной третьей оси (Y), с возможностью управления указанными первыми и вторыми двигателями (15a, 15b; 15c, 15d) так, что
один (15a) из указанных первых двигателей (15a, 15b) генерирует первое значение (S1) указанной первой тяги (S1, S5, S3; S2, S5, S4), а другой (15b) из указанных первых двигателей (15a, 15b) генерирует второе значение (S2) указанной второй тяги (S2, S6, S3; S1, S6, S4), отличное от указанного первого значения (S1); и
один (15d) из указанных вторых двигателей (15c, 15d) генерирует указанное первое значение (S1) указанной второй тяги (S2, S6, S3; S1, S6, S4), а другой (15c) из указанных вторых двигателей (15c, 15d) генерирует указанное значение (S2) указанной второй тяги (S2, S6, S3; S1, S6, S4), отличное от указанного первого значения (S1);
при этом указанный один (15a) из указанных первых двигателей (15a, 15b) и другой (15b) из указанных первых двигателей (15a, 15b) расположены с взаимно противоположных боковых сторон срединной плоскости указанного фюзеляжа (2) параллельно указанной третьей оси (Y) и перпендикулярно четвертой оси (X), по существу параллельной направлению продолжения одного из указанного второго участка (5) и третьего участка (6);
при этом указанный один (15c) из указанных вторых двигателей (15c, 15d) и другой (15d) из указанных вторых двигателей (15c, 15d) расположены с взаимно противоположных боковых сторон указанной срединной плоскости указанного фюзеляжа (2).
9. Летательный аппарат по п. 7 или 8, отличающийся тем, что указанный блок (19) управления запрограммирован, в случае, когда необходимо поворачивать указанный летательный аппарат (1') вокруг указанной четвертой оси (X), с возможностью управления указанными первыми и вторыми двигателями (15a, 15b; 15c, 15d) так, что указанные первые двигатели (15a, 15b) генерируют третье значение (S5) указанной первой тяги (S1, S5, S3; S2, S5, S4), а указанные вторые двигатели (15c, 15d) генерируют четвертое значение (S6) указанной второй тяги (S2, S6, S3; S1, S6, S4); при этом указанное третье значение (S5) и четвертое значение (S6) отличаются друг от друга.
10. Летательный аппарат по любому из пп. 7-9, отличающийся тем, что указанный блок (19) управления запрограммирован, в случае, когда необходимо поворачивать указанный летательный аппарат (1') вокруг пятой оси (Z), перпендикулярной указанной третьей оси (Y) и четвертой оси (X), с возможностью управления указанными первыми и вторыми двигателями (15a, 15b; 15c, 15d) так, что
один (15a) из указанных первых двигателей (15a, 15b) генерирует пятое значение (S3) указанной первой тяги (S1, S5, S3; S2, S5, S4), а другой (15b) из указанных первых двигателей (15a, 15b) генерирует шестое значение (S4) указанной первой тяги (S1, S5, S3; S2, S5, S4), отличное от указанного первого значения (S3); и
один (15c) из указанных вторых двигателей (15c, 15d) генерирует указанное пятое значение (S3) указанной второй тяги (S2, S6, S3; S1, S6, S4), а другой (15d) из указанных вторых двигателей (15c, 15d) генерирует указанное шестое значение (S4) указанной второй тяги (S2, S6, S3; S1, S6, S4), отличное от указанного пятого значения (S3);
при этом указанный один (15a) из указанных первых двигателей (15a, 15b) и один (15c) из указанных вторых двигателей (15c, 15d) расположены с одной и той же первой боковой стороны указанной срединной плоскости указанного фюзеляжа (2);
при этом указанный другой (15b) из указанных первых двигателей (15a, 15b) и другой (15d) из указанных вторых двигателей (15c, 15d) расположены с одной и той же второй боковой стороны указанного фюзеляжа (2), противоположной указанной первой боковой стороне в отношении указанной срединной плоскости указанного фюзеляжа (2).
11. Летательный аппарат по любому из пп. 8-10, отличающийся тем, что
указанная втулка (16) одного (15a) из указанных первых двигателей (15a, 15b) является вращаемой в первом направлении вращения, а указанная втулка (16) другого (15b) из указанных первых двигателей (15a, 15b) является вращаемой во втором направлении вращения, противоположном указанному первому направлению вращения;
указанная втулка (16) одного (15d) из указанных вторых двигателей (15c, 15d) является вращаемой в указанном первом направлении вращения, а указанная втулка (16) другого (15c) из указанных вторых двигателей (15c, 15d) является вращаемой в указанном втором направлении вращения;
один (15a) из указанных первых двигателей (15a, 15b) и один (15c) из указанных вторых двигателей (15c, 15d) расположены с первой боковой стороны указанной срединной плоскости указанного фюзеляжа (2), а другой (15b) из указанных первых двигателей (15a, 15b) и другой (15d) из указанных вторых двигателей (15c, 15d) расположены со второй боковой стороны указанного фюзеляжа (2), противоположной указанной первой боковой стороне в отношении указанной срединной плоскости указанного фюзеляжа (2);
указанные втулки (16) указанных первых двигателей и вторых двигателей (15a, 15c; 15b, 15d) расположены с одной и той же боковой стороны в отношении указанной срединной плоскости указанного фюзеляжа (2), при этом одна из них является вращаемой в указанном первом направлении вращения, а другая - в указанном втором направлении вращения.
12. Летательный аппарат-тейлситтер (1'), включающий
фюзеляж (2), расположенный, при использовании, вертикально в положении взлета/посадки указанного летательного аппарата (1');
одно крыло (4);
по меньшей мере два первых двигателя (15a, 15b), выполненных с возможностью приложения, при использовании, соответственных первых тяг (S1, S5, S3; S2, S5, S4), направленных вдоль соответственных первых осей (A), к указанному тейлситтеру (1, 1'); и
по меньшей мере два вторых двигателя (15c, 15d), вращающихся вокруг соответственных вторых осей (A), расположенных выше указанных первых осей (A) указанных первых двигателей (15a, 15b) со ссылкой на указанное крейсерское положение; при этом указанные по меньшей мере два вторых двигателя (15c, 15d) выполнены с возможностью приложения, при использовании, соответственных вторых тяг (S2, S6, S3; S1, S6, S4), направленных вдоль соответственных вторых осей (A), к указанному тейлситтеру (1');
при этом указанные первые и вторые двигатели (15a, 15b; 15c, 15d) опираются на указанное одно крыло (4);
при этом указанное одно крыло (4) содержит первый участок (5) и второй участок (6), взаимно разнесенные друг от друга;
при этом указанный второй участок (6) расположен, при использовании, выше указанного первого участка (5) со ссылкой на указанное крейсерское положение указанного летательного аппарата (1');
при этом указанный первый участок (5) содержит два полукрыла (5), которые продолжаются с противоположных боковых сторон указанного фюзеляжа (2);
при этом указанный фюзеляж (2) расположен, при использовании, поперечно вертикальному направлению в крейсерском положении указанного летательного аппарата (1');
при этом указанное крыло (4) дополнительно содержит третий участок (30), расположенный, при использовании, ниже указанного первого участка (5) со ссылкой на указанное крейсерское положение указанного летательного аппарата (1');
отличающийся тем, что указанные первые двигатели (15a, 15b) расположены на соответственных первых концах (8) указанного первого участка (5);
при этом указанные вторые двигатели (15c, 15d) расположены на соответственных вторых концах (9) указанного второго участка (6).
13. Летательный аппарат-тейлситтер (1'), включающий
фюзеляж (2), расположенный, при использовании, вертикально в положении взлета/посадки указанного летательного аппарата (1');
одно крыло (4);
по меньшей мере два первых двигателя (15a, 15b), выполненных с возможностью приложения, при использовании, соответственных первых тяг (S1, S5, S3; S2, S5, S4), направленных вдоль соответственных первых осей (A), к указанному тейлситтеру (1, 1'); и
по меньшей мере два вторых двигателя (15c, 15d), вращающихся вокруг соответственных вторых осей (A), расположенных выше указанных первых осей (A) указанных первых двигателей (15a, 15b) со ссылкой на указанное крейсерское положение; при этом указанные по меньшей мере два вторых двигателя (15c, 15d) выполнены с возможностью приложения, при использовании, соответственных вторых тяг (S2, S6, S3; S1, S6, S4), направленных вдоль соответственных вторых осей (A), к указанному тейлситтеру (1');
при этом указанные первые и вторые двигатели (15a, 15b; 15c, 15d) опираются на указанное одно крыло (4);
при этом указанное одно крыло (4) содержит первый участок (5) и второй участок (6), взаимно разнесенные друг от друга;
при этом указанный второй участок (6) расположен, при использовании, выше указанного первого участка (5) со ссылкой на указанное крейсерское положение указанного летательного аппарата (1');
при этом указанный первый участок (5) содержит два полукрыла (5), которые продолжаются с противоположных боковых сторон указанного фюзеляжа (2);
при этом указанный фюзеляж (2) расположен, при использовании, поперечно вертикальному направлению в крейсерском положении указанного летательного аппарата (1');
при этом указанный крыло (4) дополнительно содержит третий участок (30), расположенный, при использовании, ниже указанного первого участка (5) со ссылкой на указанное крейсерское положение указанного летательного аппарата (1');
отличающийся тем, что указанное крыло (4) имеет замкнутую переднюю секцию (C);
при этом указанное крыло (4) представляет собой неплоское крыло, замкнутое само на себе и без свободных концов; при этом указанная передняя секция (C) образована выступом указанного крыла (4) на плоскости, перпендикулярной третьей оси (Y), параллельной направлению продолжения указанного фюзеляжа (2).
| EP 3263445 B1, 17.10.2018 | |||
| DE 102011012503 A1, 30.08.2012 | |||
| WO 2016005954 A1, 14.01.2016 | |||
| Прибор для вычерчивания аффинных, аксонометричных и перспективных проекций тела по его ортогональной проекции | 1949 |
|
SU84342A1 |
| СПОСОБ ПОЛУЧЕНИЯ БИС(ТРИАЛКИЛСИЛИЛ)ФОСФИНАТОВ | 0 |
|
SU172327A1 |

