Изобретение относится к области РЭБ, и может быть использовано, например, при разработке систем подавления РЭС управления оружием и войсками противника.
Наиболее близким по технической сущности к заявляемому изобретению является способ подавления РЭС, основанный на сборе и анализе данных о радиоэлектронной обстановке, доставке малогабаритного модуля помех (ММП) в район расположения РЭС, дистанционном управлении ММП и формировании с его помощью поля помехи (см., например, В.Г. Радзиевский В.Г. Сетецентрическая пространственно-распределенная система на основе малогабаритных модулей и помех // Радиотехника, 2012, №6, С.4-11). Недостатком способа является низкая эффективность подавления, обусловленная ошибками доставки ММП в район расположения РЭС, подлежащего подавлению. Большие ошибки доставки могут привести к установке ММП за пределы зоны подавления РЭС. Под зоной подавления РЭС понимается область пространства с центром в точке установки ММП, в пределах которого обеспечивается превышение помехи над сигналом на входе РЭС при максимальной мощности излучения ММП.
Техническим результатом изобретения является повышение эффективности подавления РЭС за счет уточнения точности доставки ММП в район подавляемого РЭС и доставке при необходимости другого MПП.
Указанный технический результат достигается тем, что в известном способе подавления РЭС, основанном в сборе и анализе данных о радиоэлектронной обстановке, доставке ММП в район расположения РЭС, дистанционном управлении ММП и формировании с его помощью поля помехи, согласно изобретению, после доставки ММП определяют координаты его местоположения и передают в центр управления и обработки данных, где с учетом этих координат оценивают наличие прямой видимости на РЭС и результат оценки используют для изменения режимов работы (управления) ММП, рассчитывают расстояние между ММП и РЭС, определяют возможность подавления РЭС при нахождении ММП на рассчитанном расстоянии, если подавление невозможно, то принимают решение о доставке в район расположения РЭС другого малогабаритного модуля помех с учетом ошибок доставки предыдущего ММП.
Сущность изобретения заключается в том, что после доставки ММП определяют координаты его местоположения и передают в центр управления и обработки данных, где с учетом этих координат оценивают наличие прямой видимости на РЭС и результат оценки используют для изменения режимов работы (управления) ММП, рассчитывают расстояние между ММП и РЭС, определяют возможность подавления РЭС при нахождении ММП на рассчитанном расстоянии, если подавление невозможно, то принимают решение о доставке в район расположения РЭС другого малогабаритного модуля помех с учетом ошибок доставки предыдущего ММП.
В известном способе расчет зоны подавления и выбор точки (места) размещения ММП с целью эффективного подавления РЭС производится в зависимости от рельефа местности и технических характеристик (мощность, тип антенны, диапазон рабочих частот и т.д.), влияющих на мощность помехи на входе РЭС. После произведенных расчетов осуществляется доставка ММП в расчетную точку. Доставка ММП в районы подавляемых РЭС будет производиться пилотируемыми и беспилотными летательными аппаратами, высокоточными артиллерийскими снарядами (см., например, Палий А.И. Радиоэлектронная борьба. - 2-е изд., перераб. и доп. - М.: Воениздат, 1989, стр. 49). В дальнейшем ММП осуществляет подавление РЭС в соответствии с заданными режимами и командами, поступающими из центра управления. За счет ошибок, обусловленных ошибками систем наведения средств доставки, климатическими условиями, ошибками прицеливания и т.д., ММП может быть доставлен не в расчетную точку. Вследствие этого РЭС может оказаться вне зоны подавления, или в направлении, прикрытом, например, рельефом местности (гористая местность, лесополоса и т.д.).
В заявляемом способе после того, как ММП будет доставлен в район размещения РЭС, определяют координаты местоположения ММП. Это может быть выполнено, например, с помощью навигационного приемника, выполненного в едином кассетном исполнении с ММП, который после фиксации в грунте автоматически приводится в рабочее состояние и передает через спутниковую навигационную систему в центр управления и обработки данных координаты местоположения ММП. В центре управления и обработки данных с использованием поступивших координат оценивают наличие прямой видимости в направлении на РЭС, например, с использованием геоинформационной системы, установленной на автоматизированное рабочее место должностного лица центра управления и обработки данных (см., например, https://sapr.ru/article/25493. Дата обращ. 27.112020 г.).
Рассчитывают расстояние между ММП и РЭС, например, с использованием методики определения расстояния между двумя точками по известным координатам (см., например, https://m.onlinemschool.com/matMito/ Дата обращ. 27.112020 г.). Координаты РЭС могут быть получены по данным разведки или по данным глобальной навигационной системы.
Задача определения возможности подавления РЭС при нахождении ММП на рассчитанном расстоянии может быть решена, например, путем сравнения расстояния между МПП и подавляемым РЭС с максимальной дальностью подавления МПП или сравнения уровня сигнала помехи на входе РЭС с требуемыми для эффективного подавления уровнями сигнала. Уровень сигнала помехи на входе РЭС может быть рассчитана по формуле, приведенной на стр. 53 книги Палий А.И. Радиоэлектронная борьба. - 2-е изд., перераб. и доп. - М.: Воениздат, 1989.
Ошибки доставки ММП могут быть определены, как расстояние между расчетной точкой доставки и точкой, куда ММП был доставлен, по известным координатам этих точек. Учет ошибки доставки осуществляется в системах наведения средств доставки в соответствии с их алгоритмами.
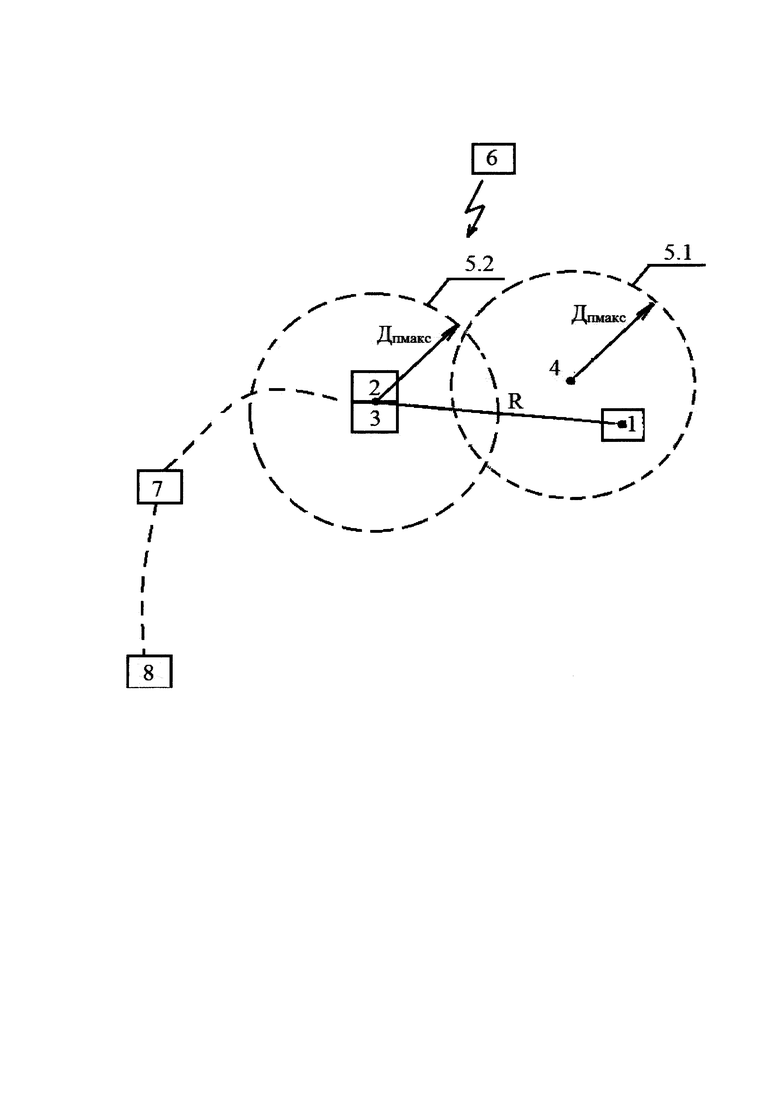
Порядок решения дополнительных задач, согласно изобретению, поясняется фигурой, где схематично представлено взаимное расположение РЭС и МПП. На фигуре обозначено: 1 - РЭС, подлежащее подавлению; 2 - МПП и 3 -навигационный приемник, выполненные в едином кассетном исполнении; 4 - расчетная точка, куда должен быть доставлен МПП 2; 5.1 - зона подавления МПП, при условии его доставки в расчетную точку 4; 5.2 - зона подавления МПП после его доставки с ошибкой; 6 - спутниковая навигационная система; 7 - носитель МПП; 8 - центр управления и обработки данных с пунктом доставки; Дпмакс - максимальная дальность подавления МПП; R - расстояние между МПП и РЭС.
После расчета зон подавления и выбора точки, куда должен быть доставлен МПП 2, носитель МПП 7 (например, артиллерийский или реактивный снаряд) доставляет его и навигационный приемник 3, выполненные в едином кассетном исполнении с МПП в район подавляемого РЭС 1. Из-за наличия ошибок стрельбы и ошибок наведения носителя 7, МПП доставляется не в расчетную точку 4, а с ошибкой в любую другую точку, например, в точку, где показаны МПП 2 и навигационный приемник 3, выполненные в едином кассетном исполнении. Навигационный приемник 3 после фиксации в грунте включается автоматически и передает через спутниковую навигационную систему 6 свои координаты и соответственно координаты МПП 2 (см., например, Ю.П. Гришин, В.П. Ипатов, Ю.М., Казаринов и др. Радиотехнические системы. - М.: «Высшая школа», 1990, стр. 306-311) в центр управления и обработки данных с пунктом доставки 8, где с использованием поступивших координат оценивают наличие прямой видимости в направлении на подавляемое РЭС 1. Наличие прямой видимости в дальнейшем может быть использовано при управлении режимами работы МПП 2, в частности, для снижения его мощности излучения.
Рассчитывают расстояние между ММП 2 и РЭС 1. Путем сравнения рассчитанного расстояния R с максимальной дальностью подавления МПП Дпмакс определяют возможность подавления РЭС. На фигуре показан случай, когда R>Дпмакс, следовательно, подавление РЭС невозможно. Решение задачи подавления может быть достигнуто только путем доставки другого МПП.
Рассчитывают ошибку доставки ММП, которая в пункте доставки используется для корректировки условий стрельб носителя ММП 2.
Таким образом, предлагаемый способ обеспечивает повышение эффективности подавления РЭС за счет уточнения точности доставки ММП 2 в районе подавляемого РЭС.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестен способ подавления РЭС, основанный в сборе и анализе данных о радиоэлектронной обстановке, доставке малогабаритного модуля помех в район расположения РЭС, подлежащего подавлению, дистанционном управлении ММП и формировании с его помощью поля помехи для подавления РЭС, что после доставки ММП определяют координаты его местоположения и передают в центр управления, где с учетом координат местоположения ММП оценивают наличие прямой видимости и результаты оценки используют для изменения режимов работы ММП, рассчитывают расстояние между ММП и РЭС, определяют возможность подавления РЭС при нахождении ММП на рассчитанном расстоянии, если подавление невозможно, то принимают решение о доставке в район расположения РЭС другого малогабаритного модуля помех с учетом ошибки доставки предыдущего ММП.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые радиоэлектронные узлы и устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАЩИТЫ МОБИЛЬНЫХ ОБЪЕКТОВ ОТ РАДИОЛОКАЦИОННЫХ СРЕДСТВ РАЗВЕДКИ И НАВЕДЕНИЯ ОРУЖИЯ | 2015 |
|
RU2577843C1 |
| Способ радиоэлектронного подавления приемных устройств потребителей глобальных навигационных спутниковых систем | 2016 |
|
RU2624247C1 |
| Способ доставки передатчиков радиопомех приемным устройствам наземных радиоэлектронных средств спутниковых систем радиосвязи и радионавигации | 2024 |
|
RU2825033C1 |
| Пространственно-распределенная система радиоэлектронного подавления приемных устройств потребителей глобальных навигационных спутниковых систем | 2017 |
|
RU2656247C1 |
| Устройство защиты мобильных объектов от радиолокационных средств разведки и наведения оружия | 2016 |
|
RU2608579C1 |
| СПОСОБ ДОСТАВКИ ИСТОЧНИКА РАДИОПОМЕХ | 2015 |
|
RU2591047C1 |
| СПОСОБ ДОСТАВКИ ЗАБРАСЫВАЕМОГО ПЕРЕДАТЧИКА РАДИОПОМЕХ | 2020 |
|
RU2751548C1 |
| СПОСОБ ДОСТАВКИ ПОСТАНОВЩИКА РАДИОПОМЕХ | 2008 |
|
RU2361233C1 |
| СПОСОБ СОЗДАНИЯ НЕМОДУЛИРОВАННЫХ АКТИВНЫХ ПОМЕХ | 2005 |
|
RU2292058C1 |
| Способ радиоэлектронного мониторинга и активного радиоэлектронного противодействия | 2024 |
|
RU2837696C1 |
Изобретение относится к области радиоэлектронной борьбы и может быть использовано при разработке средств подавления радиоэлектронных средств (РЭС). Техническим результатом изобретения является повышение эффективности подавления РЭС за счет уточнения точности доставки малогабаритного модуля помех (ММП) в районе подавляемого РЭС. Способ подавления РЭС заключается в том, что после доставки ММП определяют координаты его местоположения и передают в центр управления, где с учетом координат местоположения ММП оценивают наличие прямой видимости и результаты оценки используют для изменения режимов работы ММП, рассчитывают расстояние между ММП и РЭС, определяют возможность подавления РЭС при нахождении ММП на рассчитанном расстоянии, если подавление невозможно, то принимают решение о доставке в район расположения РЭС другого малогабаритного модуля помех с учетом ошибки доставки предыдущего ММП. 1 ил.
Способ подавления РЭС, основанный на сборе и анализе данных о радиоэлектронной обстановке, доставке малогабаритного модуля помех (ММП) в район расположения РЭС, дистанционном управлении ММП и формировании с его помощью поля помехи, отличающийся тем, что после доставки ММП определяют координаты его местоположения и передают в центр управления и обработки данных, где с учетом координат местоположения ММП оценивают наличие прямой видимости на РЭС и результаты оценки используют для изменения режимов работы ММП, рассчитывают расстояние между ММП и РЭС, определяют возможность подавления РЭС при нахождении ММП на рассчитанном расстоянии, если подавление невозможно, то принимают решение о доставке в район расположения РЭС другого малогабаритного модуля помех с учетом ошибки доставки предыдущего ММП.
| СПОСОБ ДОСТАВКИ ПОСТАНОВЩИКА РАДИОПОМЕХ | 2008 |
|
RU2361233C1 |
| СПОСОБ ДОСТАВКИ ЗАБРАСЫВАЕМОГО ПЕРЕДАТЧИКА РАДИОПОМЕХ | 2020 |
|
RU2751548C1 |
| Способ доставки постановщиков помех и беспилотный робототехнический комплекс радиоэлектронной борьбы | 2016 |
|
RU2625206C1 |
| US 20070063886 A1, 22.03.2007. | |||

