Область техники, к которой относится изобретение
Изобретение относится к области детектирования целевых объектов, а точнее к детектированию объектов, содержащих намагниченные или ферромагнитные компоненты.
Уровень техники
Современная обстановка, которая обусловлена различными злонамеренными действиями в местах пребывания публики, сформировала потребность в детектировании оружия типа автоматической винтовки (автомата) на входе в общественные места, такие как стадионы, концертные залы, универмаги и т.п.
В настоящее время такое детектирование обычно выполняет персонал службы безопасности, оснащенный ручными портативными детекторами, которыми проводят вдоль тела и вокруг имущества лиц, которые хотят войти в различные места пребывания публики, о которых идет речь. Однако, такой досмотр является продолжительным и неудобным, а число людей, которые хотят войти в охраняемое место, часто слишком велико, чтобы выполнять досмотр удовлетворительным образом.
Также были предложения устанавливать стационарные рамки в местах входа в различные общественные учреждения. Такие рамки являются подходящим решением в случаях, когда требуется неподвижно закрепленная установка. Однако, такая установка требует выполнения значительного объема монтажных работ, что делает ее непригодной для общественных учреждений типа стадионов, концертных залов и универмагов. Вместе с тем в местах пребывания публики необходимо иметь возможность освобождать пространство, чтобы обеспечить возможность беспрепятственного аварийного выхода, что делает желательным использование переносных систем.
Также были предложения использовать переносные индивидуальные ограждения, содержащие магнитостатические датчики. Такие ограждения как правило содержат стойку, прикрепленную к основанию и оснащенную по меньшей мере одним магнитостатическим датчиком, к примеру тремя магнитостатическими датчиками, распределенными по высоте стойки. Каждый датчик выполнен с возможностью формирования сигнала (напряжения), который представляет интенсивность детектированного электромагнитного поля. Такие ограждения, в частности, используются в тюрьмах для досмотра заключенных на предмет проноса металлических объектов, особенно мобильных телефонов. Для такого детектирования требуется, чтобы чувствительность магнитных датчиков была очень высокой, поскольку заключенным обычно запрещено иметь при себе любые металлические или магнитные материалы.
Чтобы увеличить чувствительность таких ограждений, было предложено использовать их парами, так, чтобы создавать проход. Характерно, что чувствительность датчиков уменьшается с расстоянием по экспоненте. Ограждения подобного типа имеют то преимущество, что являются переносными и не требуют никаких монтажных работ. Кроме того, поскольку современные автоматические винтовки изготовляют из ферромагнитного материала, и они имеют большой размер, возмущение, которое они создают в электромагнитном поле Земли, является достаточно существенным, чтобы его можно было детектировать указанными датчиками.
Однако, в отличие от заключенных в тюрьмах, люди часто носят на одежде или несут с собой металлические объекты, которые могут содержать намагниченные или ферромагнитные детали, а в большинстве случаев -смартфоны, микросхемы которых намагничены. При этом собственное магнитное поле смартфонов практически сравнимо с нарушением магнитного поля Земли, создаваемым при перемещении автомата. Поэтому прохождение таких людей будет систематически запускать сигнализацию ограждения даже при отсутствии автоматической винтовки. Поэтому необходимо иметь возможность различать смартфоны и автоматическую винтовку, чтобы гарантировать способность ограждений детектировать такое оружие.
Поэтому в патентном документе WO 2017/141022 было предложено добавлять к каждому из ограждений проставочный элемент, чтобы направлять досматриваемое лицо, и вынуждать его/ее проходить через середину прохода, образуемого ограждениями, где чувствительность в проходе, образованном парой ограждений, является более равномерной. Точнее, поскольку чувствительность магнитостатических датчиков обратно пропорциональна расстоянию, датчики проявляют большую чувствительность вблизи ограждений, чем в середине. При этом избыток чувствительности вблизи ограждений является причиной почти всех случаев ложной тревоги. Наличие проставочных элементов дает возможность избежать того, чтобы досматриваемые лица подходили слишком близко к ограждениям, и гарантировать, что они остаются в середине прохода, где чувствительность ниже и является более равномерной.
Однако, такое увеличение расстояния между ограждениями связано с риском, что проход оказывается в какой-то мере чувствительным к наружным помехам, поскольку сигнал на таком расстоянии от ограждений более низкий, и, следовательно, более похож на сигналы, создаваемые окружающими элементами. Кроме того, получаемые таким образом ограждения, труднее переносить, так как они значительно тяжелее и более громоздкие, чем исходные ограждения. Кроме того, в случаях, когда необходимо организовать множество проходов, в частности, в случае стадионов или больших концертных залов, комплекс, образованный каждой парой ограждений очень громоздок, и таким образом ограничивает число проходов, которые могут быть созданы.
В патентном документе WO 2011/020148 раскрыта система детектирования целевого объекта, включающая в себя отдельные детекторы, содержащие по меньшей мере одну магнитную систему, выполненную с возможностью формирования сигнала, представляющего интенсивность детектированного магнитного поля, и обрабатывающий блок 20, выполненный с возможностью приема сигналов, сформированных магнитными датчиками. Этот документ, в частности, касается области индукционных детекторов в сочетании с другой технологией детектирования для улучшения выполнения детектирования.
В патентном документе US 2018/012465 раскрыта система детектирования, содержащая детекторы, каждый из которых включает в себя по меньшей мере один магнитный датчик, выполненный с возможностью формирования сигнала, представляющего интенсивность детектированного магнитного поля, и для каждого детектора - обрабатывающий блок, выполненный с возможностью приема сигналов, представляющих интенсивность магнитного поля, детектированного датчиками. Поскольку магнитное поле, получаемое в месте расположения детектора, обратно пропорционально третьей степени радиуса г чувствительности детектора, два детектора системы, рассмотренной в заявке, разнесены на расстояние равное половине их радиуса чувствительности. Таким образом детекторы являются независимыми и их чувствительность может быть уменьшена.
В патентном документе US 2006/197523 раскрыта система детектирования объекта, включающая в себя несколько детекторов, каждый из которых содержит несколько градиометров и процессор, выполненный с возможностью сбора сигналов, формируемых градиометрами. Процессор вычисляет среднее значение собранных сигналов с целью измерения фонового шума. С целью устранения шума указанное среднее значение затем вычитается из сигналов, создаваемых градиометрами.
Раскрытие сущности изобретения
Поэтому, задача настоящего изобретения предложить систему детектирования, которая может быть быстро смонтирована и демонтирована, например, на входе в места пребывания публики, и обладает способностью надежно различать небольшие объекты, содержащие магнитные компоненты, такие как смартфоны, и автоматические винтовки, обладая при этом приемлемыми размерами.
Для этого в изобретении предложена система детектирования целевого объекта, включающая в себя:
- первый детектор, содержащий по меньшей мере первый магнитный датчик, выполненный с возможностью формирования сигнала, представляющего интенсивность детектированного магнитного поля,
- второй детектор, отдельный от первого детектора, содержащий по меньшей мере второй магнитный датчик, выполненный с возможностью формирования сигнала, представляющего интенсивность детектированного магнитного поля, и
- обрабатывающий блок, выполненный с возможностью приема сигналов, представляющих интенсивность магнитного поля, детектированного первым магнитным датчиком и/или вторым магнитным датчиком,
Система дополнительно содержит по меньшей мер один коммуникационный интерфейс, выполненный с возможностью передачи сигнала, сформированного первым и/или вторым магнитным датчиком в обрабатывающий блок. Кроме того, обрабатывающий блок выполнен с возможностью определения среднего значения сигналов, сформированных магнитными датчиками первого и второго детекторов, и передачи инструкций для формирования тревожного сигнала, когда указанное среднее значение сигналов превышает предварительно заданное пороговое значение.
Приведенные ниже определенные предпочтительные, но не носящие ограничительного характера аспекты описанной выше системы детектирования могут быть реализованы индивидуально или в сочетании друг с другом:
- обрабатывающий блок выполнен с возможностью определения среднего арифметического или среднего геометрического значения сигналов,
- коммуникационный интерфейс является беспроводным коммуникационным интерфейсом,
- первый и второй детекторы являются переносными,
- система детектирования дополнительно содержит третий детектор, причем третий детектор содержит по меньшей мере один третий магнитный датчик, выполненный с возможностью детектирования магнитного поля и формирования сигнала, представляющего интенсивность детектированного магнитного поля, при этом первый детектор и второй детектор образуют первый проход, а второй детектор и третий детектор вместе образуют второй проход.
- обрабатывающий блок размещен в каждом из первого и второго детекторов, при этом обрабатывающий блок, размещенный во втором детекторе, выполнен с возможностью, с одной стороны, вычисления среднего значения сигналов, сформированных магнитными датчиками второго и третьего детекторов, а с другой стороны, передачи в обрабатывающий блок первого детектора через коммуникационный интерфейс сигнала, представляющего интенсивность магнитного поля, детектированного вторым магнитным датчиком и вычисленного среднего значения сигналов
В соответствии со вторым аспектом изобретения предложен способ детектирования целевого объекта с помощью описанной выше системы детектирования, содержащий следующие этапы:
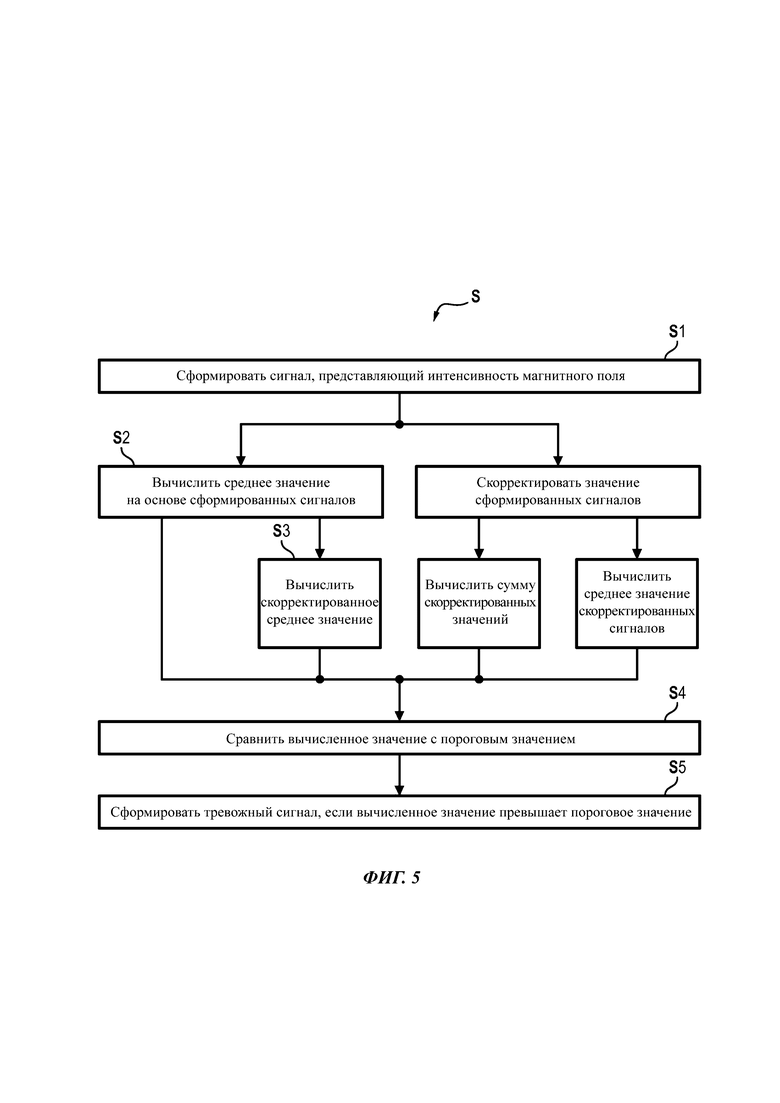
S1: формирование посредством первого и второго магнитного датчика сигнала, представляющего интенсивность магнитного поля;
S2: вычисление среднего значения сигналов, сформированных первым и вторым магнитными датчиками; и
S4: сравнение указанного среднего значения с предварительно заданным пороговым значением; при этом
S5: когда среднее значение превышает предварительно заданное пороговое значение, отправление инструкций для формирования тревожного сигнала.
Приведенные ниже определенные предпочтительные, но не носящие ограничительного характера аспекты описанного выше способа детектирования могут быть реализованы индивидуально или в сочетании друг с другом:
- способ дополнительно содержит перед этапом S4, этап S3 коррекции среднего значения, вычисленного на этапе S2, так чтобы получить среднее значение, скорректированное применением коэффициента ослабления к среднему значению этапа S2, при этом указанное скорректированное среднее значение используют для реализации этапа S4,
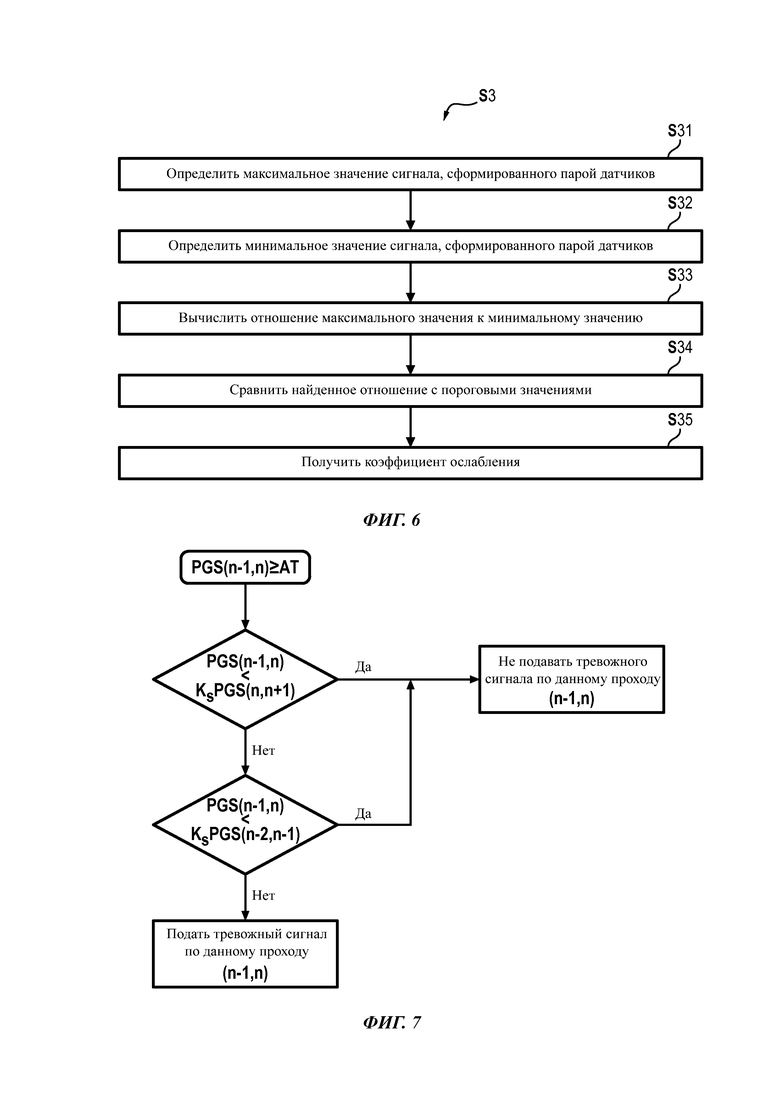
- этап S3 коррекции содержит следующие подэтапы:
S31: определение максимального значения сигнала, сформированного первым магнитным датчиком и вторым магнитным датчиком,
S32: определение минимального значения сигнала, сформированного первым магнитным датчиком и вторым магнитным датчиком,
S33: вычисление отношения определенного максимального значения к определенному минимальному значению,
S34: сравнение отношения с первым порогом и вторым порогом, причем второй порог выше первого порога, и
S35: выведение коэффициента ослабления,
при этом коэффициент ослабления равен: первому значению, когда отношение меньшей первого порога, второму значению, отличающемуся от первого значения, когда отношение больше второго порога, и значению между первым значением и вторым значением, когда отношение лежит между первым порогом и вторым порогом.
- коэффициент ослабления является линейной функцией, зависящей от указанного отношения, когда отношение лежит между первым порогом и вторым порогом,
- первое значение равно 1, второе значение равно 0,1, а коэффициент ослабления определяют из следующего выражения, когда значение отношения лежит между первым порогом и вторым порогом:
0,03*R+1,9
где R - значение отношения.
- первый детектор содержит по меньшей мере два первых магнитных датчика, а второй детектор содержит по меньшей мере два вторых магнитных датчика, причем каждый первый магнитный датчик связан с заданным вторым магнитным датчиком, так чтобы образовалась пара, при этом к каждой паре применимы этапы S1-S4.
- система детектирования дополнительно содержит третий детектор, содержащий по меньшей мере один третий магнитный датчик, выполненный с возможностью детектирования магнитного поля, и формирующий сигнал, представляющий интенсивность детектированного магнитного поля, при этом способ дополнительно содержит, перед этапом S5 формирования тревожного сигнала, этап вычисления среднего значения сигналов, сформированных вторым и третьим магнитными датчиками.
- способ дополнительно содержит, после этапа вычисления среднего значения сигналов, сформированных вторым и третьим магнитными датчиками, этап установления, на основе среднего значения сигналов, сформированных первым и вторым магнитными датчиками и среднего значения сигналов, сформированных вторым и третьим магнитными датчиками, прохода или проходов, образованных первым детектором и вторым детектором, с одной стороны, и вторым детектором и третьим детектором, с другой стороны, которые детектировали магнитное поле.
- этап установления прохода или проходов содержит следующие подэтапы:
• умножение среднего значения, вычисленного на основе сигналов второго и третьего датчиков, на коэффициент безопасности,
• сравнение среднего значения, вычисленного на основе сигналов первого и второго датчиков, со средним значением, вычисленным на основе сигналов второго и третьего датчиков, и умноженным на коэффициент безопасности,
• умножение среднего значения, вычисленного на основе сигналов первого и второго датчиков, на коэффициент безопасности,
• сравнение среднего значения, вычисленного на основе сигналов второго и третьего датчиков, со средним значением, вычисленным на основе сигналов первого и второго датчиков, и умноженным на коэффициент безопасности.
- этап S5 реализуют только первым и вторым детектором, если среднее значение, вычисленное на основе сигналов, сформированных первым и вторым датчиками, больше среднего значения, вычисленного на основе сигналов, сформированных вторым и третьим датчиками, и умноженного на коэффициент безопасности,
- этап S5 реализуют только вторым и третьим детектором, если среднее значение, вычисленное на основе сигналов, сформированных вторым и третьим датчиками, больше среднего значения, вычисленного на основе сигналов, сформированных первым и вторым датчиками, и умноженного на коэффициент безопасности.
- каждый из первого детектора и второго детектора содержит обрабатывающий блок, причем:
• этап вычисления среднего значения сигналов, сформированных вторым и третьим магнитными датчиками, выполняют посредством обрабатывающего блока второго детектора,
• этап вычисления среднего значения сигналов, сформированных первым и вторым магнитными датчиками, выполняют посредством обрабатывающего блока первого детектора, и
• этап установления пары или пар детекторов, которые детектировали магнитное поле, выполняют посредством обрабатывающего блока второго детектора и посредством обрабатывающего блока первого детектора.
- система детектирования дополнительно содержит четвертый детектор, содержащий по меньшей мере один четвертый магнитный датчик, выполненный с возможностью детектирования магнитного поля и формирующий сигнал, представляющий интенсивность детектированного магнитного поля, при этом способ детектирования дополнительно содержит следующие подэтапы:
• вычисление среднего значения сигналов, сформированных третьим и четвертым магнитными датчиками,
• умножение среднего значения сигналов, сформированных третьим и четвертым магнитными датчиками, на коэффициент безопасности,
• сравнение среднего значения сигналов, сформированных вторым и третьим магнитными датчиками, со средним значением сигналов, сформированных третьим и четвертым магнитными датчиками, и умноженным на коэффициент безопасности,
• сравнение среднего значения сигналов, сформированных третьим и четвертым магнитными датчиками, со средним значением сигналов, сформированных вторым и третьим магнитными датчиками, и умноженным на коэффициент безопасности,
• установление пары или пар детекторов среди первого, второго, третьего и четвертого детекторов, которые детектировали магнитное поле.
- этап S5 реализуют только вторым и третьим детектором, если среднее значение, вычисленное на основе сигналов, сформированных вторым и третьим датчиками, больше среднего значения, вычисленного на основе сигналов, сформированных третьим и четвертым магнитными датчиками, и умноженного на коэффициент безопасности, и
- этап S5 реализуют только третьим и четвертым детектором, если среднее значение, вычисленное на основе сигналов, сформированных третьим и четвертым датчиками, больше среднего значения, вычисленного на основе сигналов, сформированных вторым и третьим датчиками, и умноженного на коэффициент безопасности.
Краткое описание чертежей
Прочие признаки, задачи и преимущества настоящего изобретения будут более понятны, если обратиться к следующему подробному его описанию со ссылками на прилагаемые чертежи, которые приведены, как примеры, не носящие ограничительного характера.
Фиг. 1 изображает общую схему примера детектора, который может быть использован в системе детектирования, соответствующей настоящему изобретению.
Фиг. 2 иллюстрирует пример осуществления системы детектирования, соответствующей настоящему изобретению, и содержащей два детектора.
Фиг. 3 иллюстрирует пример осуществления системы детектирования, соответствующей настоящему изобретению, и содержащей три детектора, вместе образующих два прохода, а также человека, которого досматривают в одном из проходов.
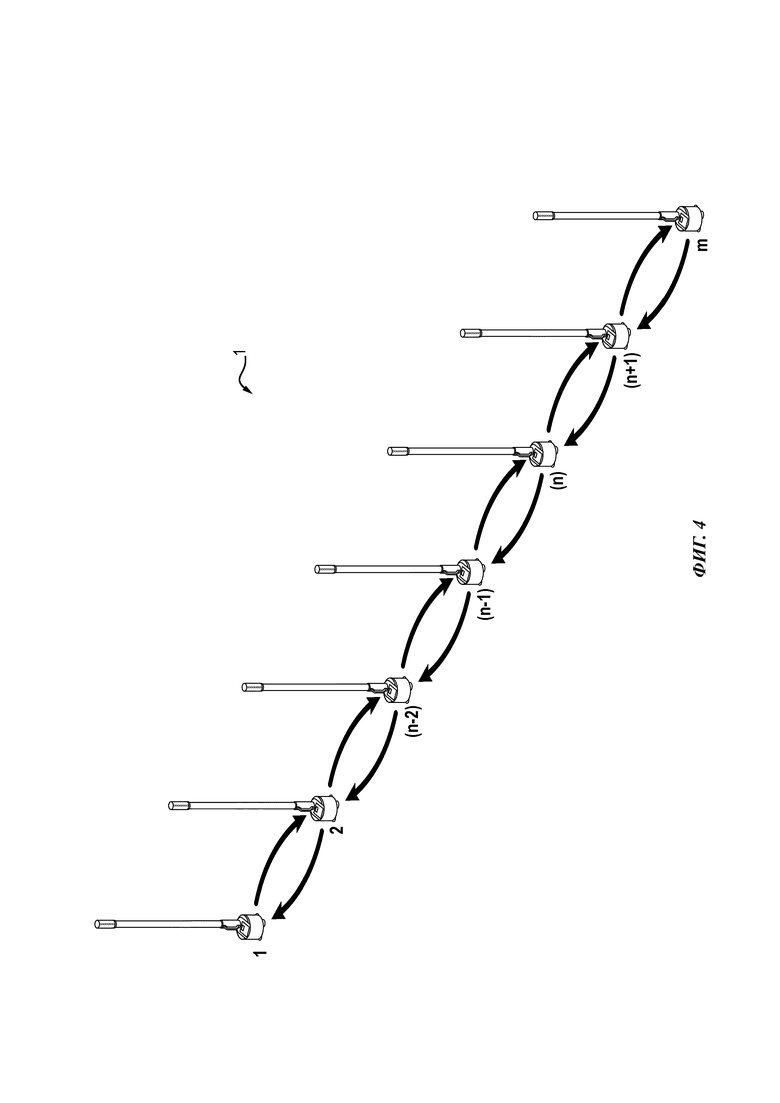
Фиг. 4 иллюстрирует пример осуществления системы детектирования, соответствующей настоящему изобретению, и содержащей m детекторов, вместе образующих m-1 проходов.
Фиг. 5 представляет блок-схему, иллюстрирующую основные этапы примера реализации способа детектирования, соответствующего настоящему изобретению.
Фиг. 6 представляет блок-схему, иллюстрирующую основные подэтапы коррекции значения сигналов.
Фиг. 7 представляет блок-схему, иллюстрирующую этапы примера реализации способа детектирования, соответствующего настоящему изобретению, в случае, когда система детектирования содержит по меньшей мере четыре детектора (n-2, n-1, n и n+1).
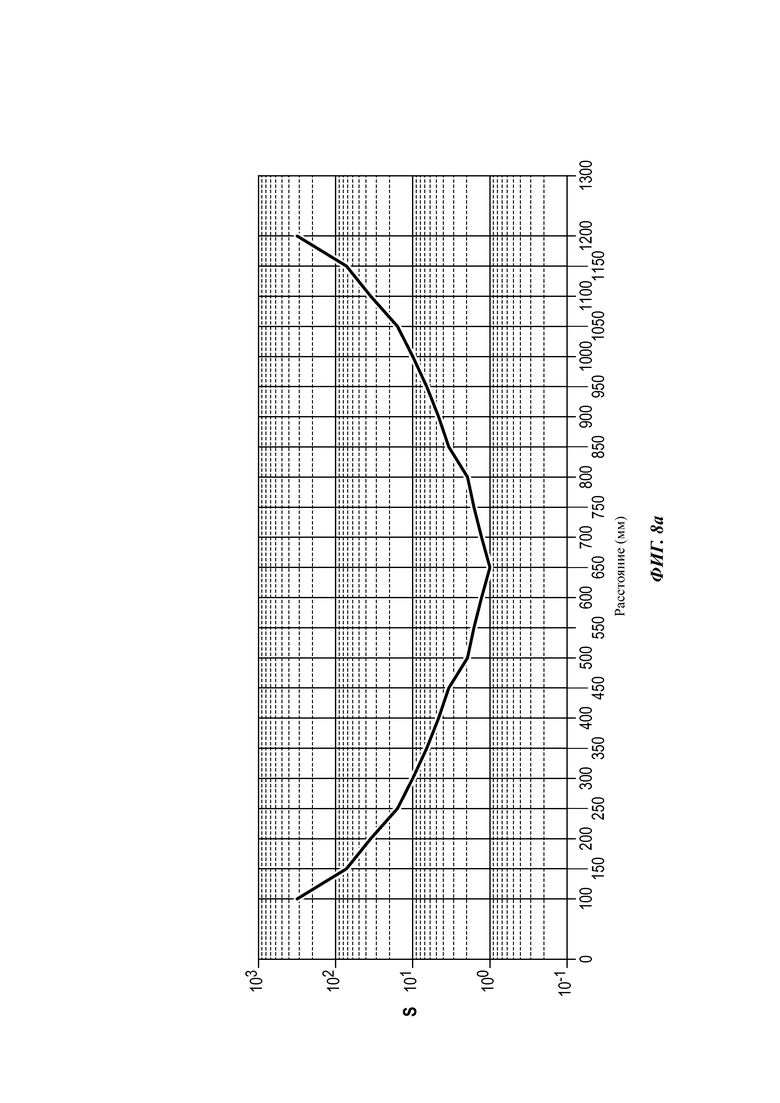
Фиг. 8а иллюстрирует интенсивность сигнала в системе детектирования, отвечающей существующему уровню техники, и содержащей два детектора, разнесенные на расстояние 130 см.
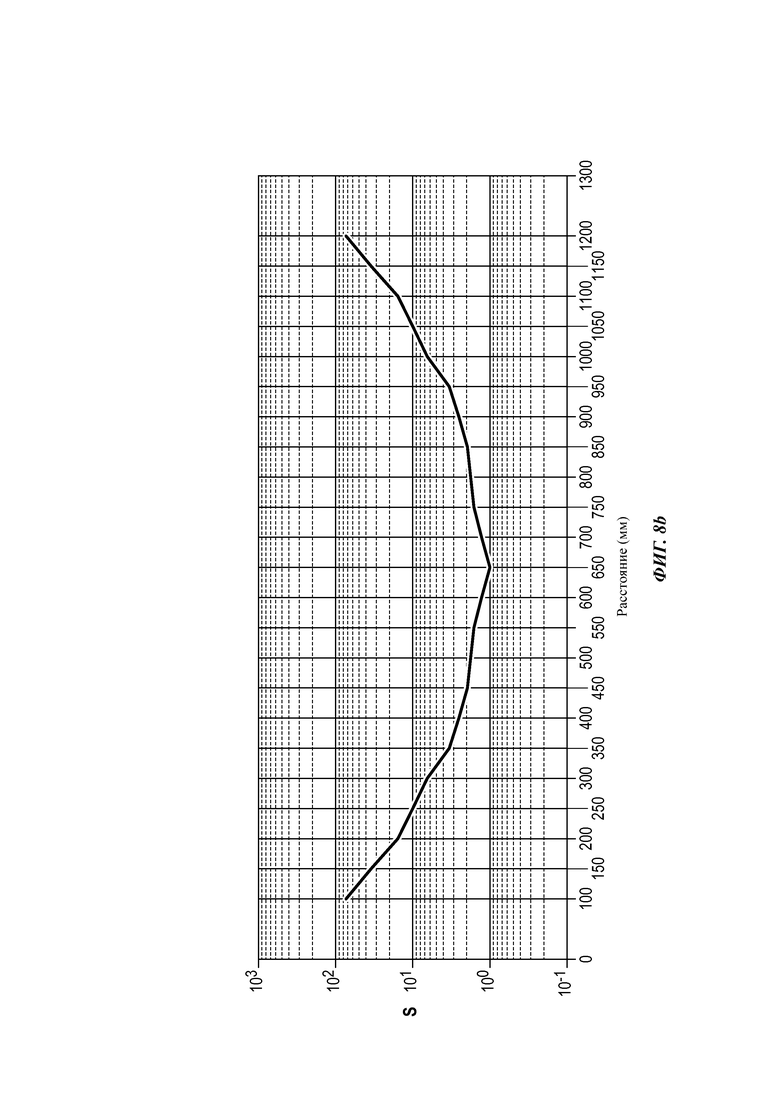
Фиг. 8b иллюстрирует интенсивность сигнала в системе детектирования, соответствующей варианту осуществления настоящего изобретения, и содержащей два детектора, разнесенные на расстояние 130 см, а также обрабатывающий блок, выполненный с возможностью вычисления среднего значения сигналов, формируемых датчиками указанных двух детекторов.
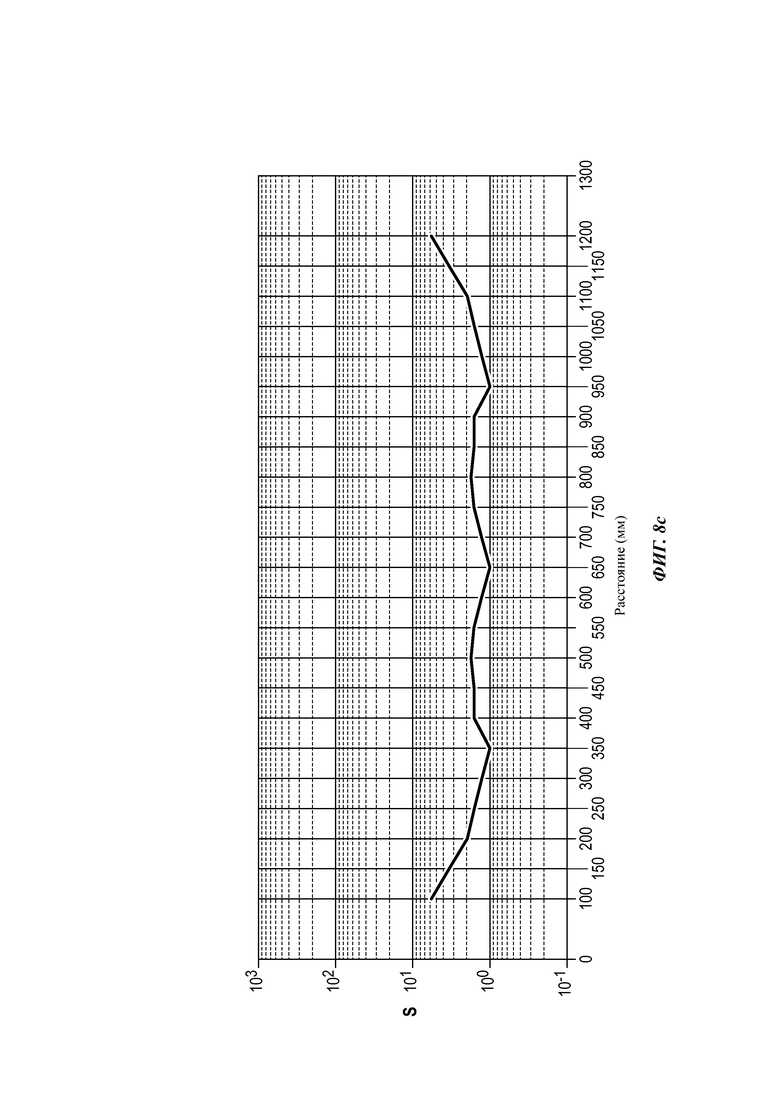
Фиг. 8с иллюстрирует интенсивность сигнала в системе детектирования, соответствующей варианту осуществления настоящего изобретения, и содержащей два детектора, разнесенные на расстояние 130 см, а также обрабатывающий блок, выполненный с возможностью вычисления среднего значения сигналов, формируемых датчиками указанных двух детекторов, и коррекции среднего значения.
Осуществление изобретения
Система 1 детектирования целевого объекта, а в частности объекта, содержащего ферромагнитный материал большого объема, такого как автоматическая винтовка (автомат), содержит:
- по меньшей мере один первый и второй детектор 10, 20, вместе образующие проход,
- по меньшей мере один обрабатывающий блок 6,
- по меньшей мере один коммуникационный интерфейс 7.
Каждый детектор 10, 20 содержит по меньшей мере один магнитный датчик 5. Следует понимать, что в данном контексте термин «магнитный» (или магнитостатический) означает пассивный датчик, выполненный с возможностью детектирования магнитного поля, которое естественным образом окружает объекты, содержащие железо или любые ферромагнитные элементы в отличие, например, от индукционной катушки.
Точнее, первый детектор 10 содержит по меньшей мере один первый магнитный датчик 5, предпочтительно по меньшей мере два датчика - к примеру три первых магнитных датчика 5, в то время как второй детектор 20 содержит по меньшей мере один второй магнитный датчик 5. Предпочтительно, второй детектор 20 и первый детектор 10 содержат одинаковое число датчиков 5.
Каждый магнитный датчик 5 выполнен с возможностью детектирования магнитного поля и формирования сигнала, представляющего интенсивность детектированного магнитного поля. Согласно одному варианту осуществления, сигналом является напряжение, значение которого пропорционально интенсивности детектированного магнитного поля.
Согласно одному варианту осуществления, каждый магнитный датчик 5 выполнен с возможностью детектирования интенсивности магнитного поля по трем ортогональным осям.
Каждый детектор 10, 20 дополнительно содержит стойку 3, выполненную с возможностью размещения на поверхности земли, например, посредством основания 4. Предпочтительно, чтобы высота стойки 3 была по существу равна среднему росту человека 2, например, составляла порядка 1,7-2,0 м.
Комплект, образованный стойкой 3 и основанием 4 является переносным, т.е. он не прикреплен однозначно к земле, и его может перемещать оператор. При необходимости каждый детектор 10, 20 может быть оснащен рукоятью, чтобы облегчить указанное перемещение. Рукоять может быть прикреплена, в частности, к основанию 4.
Магнитные датчики 5 распределены по высоте стойки 3, чтобы обеспечить детектирование целевых объектов в промежутке между ногами и головой досматриваемых людей 2. Например, каждая стойка 3 может быть оборудована тремя магнитными датчиками 5, распределенными между основанием 4 и свободным концом стойки 3.
Наконец, в пределах одной и той же системы 1 детектирования магнитные датчики детекторов 10, 20 расположены попарно на одной и той же высоте, так чтобы получить пары обращенных друг к другу датчиков 5.
Система 1 дополнительно содержит по меньшей мере один обрабатывающий блок 6, выполненный с возможностью приема сигналов, представляющих интенсивность магнитного поля, сформированных первым магнитным датчиком 5, и/или вторым магнитным датчиком 5.
Обрабатывающий блок 6 затем определяет среднее значение сигналов, сформированных магнитными датчиками 5 первого и второго детекторов 10, 20, и, когда указанное среднее значение превышает предварительно заданное пороговое значение, посылает инструкции для подачи тревожного сигнала.
Согласно одному варианту осуществления, обрабатывающий блок 6 определяет среднее арифметическое значение сигналов, которое соответствует сумме значений сигналов, поделенной на число сигналов.
Как вариант, обрабатывающий блок 6 определяет среднее геометрическое значение сигналов, которое соответствует квадратному корню из произведения сигналов.
Согласно одному варианту осуществления, обрабатывающий блок 6 может быть встроен в один из первого детектора 10 или второго детектора 20. Предпочтительно, чтобы каждый детектор 10, 20 содержал встроенный обрабатывающий блок 6. Следует понимать, что термин «встроенный» означает, что обрабатывающий блок 6 является частью детектора 10, 20, а не отдельным компонентом, с которым соединена система 1.
В данном варианте осуществления обрабатывающий блок 6 может быть, например, прикреплен к стойке 3 соответствующего детектора, или как вариант - к основанию 4.
В ином варианте обрабатывающий блок 6 может быть расположен на расстоянии от первого и второго детектора 10, 20. Тогда детекторы 10, 20 передают в обрабатывающий блок 6 сигналы, сформированные магнитными датчиками 5 с целью их обработки по маршруту их коммуникационного интерфейса 7.
Согласно одному варианту осуществления, обрабатывающий блок 6 может содержать:
- аналого-цифровой преобразователь (АЦП или A/D, от англ. Analog/Digital), выполненный с возможностью преобразования аналогового сигнала (напряжения), сформированного магнитным датчиком 5, в цифровой сигнал;
- цифровой сигнальный процессор (ЦСП или DSP, от англ. Digital Signal Processor), выполненный с возможностью формирования преобразованного цифрового сигнала; и
- микрокомпьютер управления системой (МУС или SMM, от англ. System Management Microcomputer), выполненный с возможностью приема цифрового сигнала, сформированного посредством ЦСП и его сравнения с предварительно заданным пороговым значением.
МУС соединен по меньшей мере с одним излучателем 8, выполненным с возможностью формирования тревожного сигнала, например, с акустическим излучателем 8, выполненным с возможностью выработки акустического сигнала и/или со световым излучателем 8, выполненным с возможностью выработки оптического сигнала (светодиодом, мигающим излучателем и т.п.). Излучатель 8 может располагаться в детекторе 10, 20, или как вариант, его может носить на себе оператор (наушник и т.п.). В этом случае обрабатывающий блок 6 посылает инструкции, чтобы передать тревожный сигнал в удаленный излучатель 8 посредством коммуникационного интерфейса 7 соответствующего детектора 10, 20.
Кроме того, МУС соединен с асинхронным интерфейсом UART, чтобы обеспечить соединение обрабатывающего блока 6 с компьютером (или эквивалентным устройством) и дать возможность выполнения различных действий, включая управление программой детектирования, диагностику одного или более детекторов, загрузку обновлений и т.п.
Наконец, SMM соединен с интерфейсом "человек-машина".
Каждый детектор 10, 20 системы 1 детектирования дополнительно содержит коммуникационный интерфейс 7 выполненный так, что позволяет одному из детекторов 10, 20 системы 1 обмениваться данными с другим из детекторов 20, 10 системы 1, и передавать последнему сигнал, сформированный собственным магнитным датчиком или датчиками 5. Для каждого детектора 10, 20 коммуникационный интерфейс 7 может быть соединен либо с ЦСП (как показано на фиг. 1) обрабатывающего блока 6 детектора 10, 20, либо с его МУС и с его излучателями 8 тревожного сигнала.
Коммуникационный интерфейс 7 предпочтительно представляет собой беспроводной интерфейс для упрощения монтажа системы 1 детектирования, например, интерфейс типа Wi-Fi или Bluetooth для обмена данными посредством оптического сигнала, радиосигнала, инфракрасного сигнала или же индуктивной связи. Как вариант, коммуникационный интерфейс может быть проводным.
В соответствующих случаях система 1 детектирования может содержать большее число детекторов, чтобы организовать множество проходов, при этом каждый проход формируется за счет двух соседних детекторов. Предпочтительно, чтобы детекторы одной и той же системы 1 детектирования представляли собой практически идентичные пары.
Например, система 1 детектирования может включать в себя третий детектор 30, содержащий по меньшей мере один третий магнитный датчик 5, выполненный с возможностью детектирования магнитного поля и формирования сигнала, представляющего интенсивность детектированного магнитного поля.
Аналогичным образом, так же как первый и второй детектор 10, 20, третий детектор 30 может включать в себя стойку 3, прикрепленную к основанию 4, и оснащенную третьим магнитным датчиком или датчиками 5, а также коммуникационным интерфейсом 7, а при необходимости обрабатывающим блоком 6.
Чтобы организовать несколько проходов, в настоящем изобретении предложено разместить рядом друг с другом первый детектор 10, второй детектор 20 и третий детектор 30, так чтобы получить два прохода. Точнее, первый проход образуется первым детектором 10 и вторым детектором 20, в то время как второй проход образуется вторым детектором 20 и третьим детектором 30. Поэтому в системе один и тот же детектор (в данном случае второй детектор 20) используется для формирования двух отдельных проходов, что позволяет значительно сократить объем системы 1 детектирования по сравнению, например, с системой, предложенной в патентном документе WO 2017/141022. К тому же систему, соответствующую настоящему изобретению, легче устанавливать.
Как можно будет увидеть ниже, возможность такого построения обеспечивается тем фактом, что обрабатывающий блок 6 второго детектора 20, который расположен между первым детектором 10 и вторым детектором 20, может быть выполнен с возможностью как обработки сигналов, сформированных магнитным датчиком или датчиками 5 третьего детектора 30, так и для связи с первым детектором 10, так что система 1 детектирования может определить проход, в пределах которого детектирован целевой объект несмотря на то, что магнитные датчики 5 выполняют скалярное, а не векторное детектирование.
Точнее, обрабатывающий блок 6 второго детектора 20 выполнен с возможностью:
(i) вычисления среднего значения (при необходимости с учетом поправки) или исправленного значения сигналов, сформированных вторым и третьим магнитными датчиками 5;
(ii) когда указанное вычисленное значение превышает предварительно заданное пороговое значение - передачи в обрабатывающий блок 6 первого детектора 10 через коммуникационный интерфейс 7 сигнала, представляющего интенсивность магнитного поля, детектированного вторым магнитным датчиком или датчиками 5, а также вычисленного значения.
Естественно, оператор может также использовать четыре детектора в соответствии с изобретением, чтобы организовать два прохода, при этом совместное использование второго детектора 20 для детектирования целевых объектов необязательно.
Каждый детектор 10, 20 может дополнительно содержать средства идентификации и память, чтобы обеспечить совместную работу и связь с другими детекторами системы 1 детектирования, а также реализацию способа S детектирования. Например, каждому детектору 10, 20, 30 может быть присвоен адрес, который может быть задан, когда происходит изготовление детектора 10, 20, 30, или запрограммирован, когда детекторы 10, 20, 30, образующие систему 1 детектирования, объединяются в пары. Согласно варианту осуществления изобретения, адрес каждого детектора 10, 20, 30 является фиксированным, т.е. немодифицируемым, чтобы ограничить ошибки, возникающие при манипуляциях с системой 1 детектирования, и упростить послепродажное обслуживание.
К примеру, адрес может содержать цепочку символов, которая в частности может быть образована заданным числом шестнадцатиричных пар, например, восемью.
Когда детекторы 10, 20, 30 системы 1 детектирования объединяются в пары, адрес детекторов, с которым заданный детектор образует проход, сохраняется в памяти указанного заданного детектора. Например, во время распределения параметров системы 1 детектирования, в случае если система 1 содержит первый детектор 10, второй детектор 20 и третий детектор 30:
- адрес второго детектора 20 сохраняется в памяти третьего детектора 30;
- адрес первого детектора 10 и третьего детектора 30 при задании параметров системы 1 сохраняется в памяти второго детектора 20; и
- адрес второго детектора 20 сохраняется в памяти первого детектора 10. Далее будет рассмотрен способ S детектирования с помощью системы 1 детектирования, соответствующей изобретению и содержащая два детектора 10, 20.
Чтобы облегчить прочтение описания, система 1 детектирования включает в себя первый детектор 10 и второй детектор 20, содержащие соответственно два первых магнитных датчика 5 и два вторых магнитных датчика 5, соответственно. Первые и вторые магнитные датчики 5 образуют две пары магнитных датчиков 5, причем каждая пара содержит первый датчик 5 и второй датчик 5. В предпочтительном случае пара содержит первый магнитный датчик 5 и второй магнитный датчик 5, при этом каждый из них расположен вблизи свободного конца стойки 3 первого детектора 10 и второго детектора 20, в то время как другая пара содержит первый магнитный датчик 5 и второй магнитный датчик 5, каждый из которых расположен вблизи основания 4.
Оба детектора идентичны друг другу, причем каждый содержит обрабатывающий блок 6 и коммуникационный интерфейс 7.
Естественно, в изобретение вносятся соответствующие изменения в случае, когда детекторы содержат другое число магнитных датчиков 5. В частности, детекторы могли бы содержать только один магнитный датчик 5 или более двух магнитных датчиков 5 (например, три магнитных датчика 5). Кроме того, второй детектор 20 мог бы не содержать обрабатывающего блока 6, или, как вариант, обрабатывающий блок 6 мог бы быть расположен на расстоянии от детекторов вместо того, чтобы быть размещенным в первом детекторе 10
На предварительном этапе выполняют объединение в пару первого и второго детектора 10, 20, чтобы заставить их действовать совместно, и конфигурировать, так чтобы закрепить за каждым функцию в способе S детектирования. Например, первый детектор 10 может быть настроен в качестве ведущего (master) детектора, в то время как второй детектор 20 может быть настроен в качестве ведомого (slave) детектора. Термин «ведущий детектор» заданного прохода означает детектор, у которого обрабатывающий блок 6 настроен на вычисление среднего значения и/или исправленного значения сигнала, в то время как термин «ведомый детектор» означает другой детектор в заданном проходе.
На первом этапе S1 по меньшей мере один из магнитных датчиков 5 - первый или второй - формирует сигнал, представляющий интенсивность магнитного поля.
На практике, когда происходит детектирование магнитного поля одним из магнитных датчиков 5 системы 1 детектирования, все магнитные датчики 5 указанной системы генерируют сигнал, представляющий интенсивность детектированного магнитного поля, только мощность сигналов от каждого датчика 5 будут разной.
Сигналы, сформированные первым и вторым магнитными датчиками 5, передаются в обрабатывающий блок 6, при необходимости посредством коммуникационных интерфейсов 7 первого детектора 10 и/или второго детектора 20. В данном примере первый детектор 10 является ведущим и содержит обрабатывающий блок 6, при этом сигналы вторых магнитных датчиков 5 передаются в первый детектор 10 посредством коммуникационного интерфейса 7 второго детектора 20, в то время как сигналы первых магнитных датчиков 5 могут быть переданы туда напрямую посредством первых магнитных датчиков 5.
На этапе S2 обрабатывающий блок 6 ведущего детектора вычисляет среднее значение сигналов, сформированных каждой парой магнитных датчиков 5. Таким образом, обрабатывающий блок 6 вычисляет первое среднее значение, соответствующее первой из пар первых и вторых магнитных датчиков 5, и второе среднее значение, соответствующее второй из пар.
Естественно, когда каждый детектор содержит только один датчик 5, обрабатывающий блок 6 на этапе S2 вычисляет только одно среднее значение сигналов указанных двух магнитных датчиков 5.
Как указывалось выше, обрабатывающий блок 6 может вычислять среднее арифметическое значение сигналов или, как вариант - среднее геометрическое значение.
Как вариант, вместо вычисления среднего значения сигналов каждой пары магнитных датчиков 5 обрабатывающий блок 6 может реализовать этап S3 коррекции сигналов, сформированных каждым из магнитных датчиков 5 путем применения коэффициента ослабления к указанным сигналам.
Данный этап S3 коррекции таким образом дает возможность ослаблять сигналы, формируемые магнитными датчиками 5 системы 1 детектирования путем применения к указанным сигналам поправочного коэффициента в зависимости от значения сигналов. Точнее, назначение коррекции в том, чтобы ослаблять сигнал, когда целевой объект находится близко к одному из детекторов 10, 20, где чувствительность выше, чтобы уменьшить «вес» сигнала при детектировании.
Для этого во время подэтапов S31 и S32, для каждой пары магнитных датчиков 5 обрабатывающий блок 6 определяет максимальное значение и минимальное значение среди сигналов, формируемых первым магнитным датчиком 5 и вторым магнитным датчиком 5 в заданное время.
Во время третьего подэтапа S33 обрабатывающий блок 6 вычисляет отношение определенного максимального значения к определенному минимальному значению, а затем во время четвертого подэтапа S34 сравнивает указанное отношение с определенными порогами, и на основе этого выводит значение коэффициента ослабления, который должен быть применен к значению сигналов.
Например, обрабатывающий блок 6 может, в частности, сравнить указанное отношение с первым порогом и со вторым порогом, который выше первого порога, и вывести на основе этого коэффициент ослабления. Таким образом коэффициент ослабления может быть равен:
- первому значению, когда отношение меньше первого порога,
- второму значению меньшему первого значения, когда отношение больше второго порога, и
- значению между первым значением и вторым значением, когда отношение лежит между первым порогом и вторым порогом. В частности, коэффициент ослабления может представлять собой линейную функцию, зависящую от отношения, когда указанное отношение лежит между первым порогом и вторым порогом.
Использование ситуации, когда указанное отношение лежит между максимальным значением и минимальным значением, позволяет определить, находится ли целевой объект, который создает магнитное поле или нарушает электромагнитное поле Земли, близко к одному из детекторов. В данном случае значение отношения больше второго порога, и применяемый коэффициент ослабления равен второму значению, которое меньше первого значения. Напротив, когда целевой объект находится посередине между двумя детекторами, чувствительность прохода в этой зоне более низкая. Это проявляется в том, что отношение максимального значения к минимальному значению также более низкое. Следовательно, коэффициент ослабления может быть более высоким, а результирующий коэффициент ослабления более низким.
Таким образом, достигается относительная фактическая одинаковость двух детекторов.
В качестве примера (не носящего ограничительного характера) первый порог может быть равен 30, второй порог может быть равен 60, первое значение может быть равно 1, второе значение может быть равно 0,1, а коэффициент ослабления может быть получен по следующей формуле, когда отношение лежит между первым и вторым порогом:
0,03*R+1,9
где R - значение отношения.
Другими словами, коэффициент ослабления может быть равен 1, когда отношение меньше 30, 0,1 когда отношение больше 60, и 0,03*R+1,9, когда отношение лежит между 30 и 60.
Согласно другому варианту, обрабатывающий блок 6 сразу вычисляет среднее значение сигналов для каждой пары магнитных датчиков 5 (этап S2) и осуществляет этап коррекции указанных сигналов (этап S3).
Для этого, после вычисления среднего значения сигналов для каждой пары магнитных датчиков 5 (этап S2), обрабатывающий блок 6 может применить коэффициент ослабления к определенным средним значениям (этап S3).
С другой стороны, обрабатывающий блок 6 может сначала применить коэффициент ослабления к сигналам каждой пары магнитных датчиков 5 (этап S3), а затем вычислить среднее скорректированных сигналов каждой пары магнитных датчиков 5 (этап S2, применяемый к скорректированным сигналам, а не к сигналам, сформированным магнитными датчиками 5).
Коэффициент ослабления может быть идентичным коэффициенту, который был описан выше (равный первому значению, второму значению или функции отношения в соответствии со значением отношения).
Во время пятого этапа S5 обрабатывающий блок 6 сравнивает вычисленное значение с предварительно заданным пороговым значением.
Вычисленное значение, которое используется обрабатывающим блоком 6 на пятом этапе S5, может представлять собой либо среднее значение сигналов, сформированных парой магнитных датчиков 5, полученное на этапе S2, либо среднее значение, скорректированное путем применения коэффициента ослабления после этапа S3. Когда среднее значение, а при необходимости - скорректированное среднее значение, превышает предварительно заданное пороговое значение, на шестом этапе S6 обрабатывающий блок 6 посылает инструкции по меньшей мере в один из излучателей 8 для испускания тревожного сигнала (оптического, звукового и т.п.). Предпочтительно обрабатывающий блок 6 посылает инструкции для испускания тревожного сигнала в излучатели 8 первого детектора 10 и второго детектора 20 (через коммуникационные интерфейсы 7), так что один или более тревожных сигналов испускаются на обеих сторонах прохода. Как вариант, только определенный излучатель или излучатели 8 одного из детекторов 10, 20 могут принимать инструкции на сигнализацию от обрабатывающего блока 6.
Как вариант, когда обрабатывающий блок 6 определяет только скорректированное значение сигналов, не принимая в расчет среднее значение, на этапе S5 производится сравнение суммы скорректированных значений сигналов (а не их среднего) с предварительно заданным пороговым значением. Естественно, сигналы, формированные датчиками 5, могут сначала быть просуммированы перед применением к ним этапа S3 коррекции.
С другой стороны, вместо вычисления суммы скорректированных значений сигналов, обрабатывающий блок 6 может определить максимальное значение скорректированных сигналов и сравнить, на этапе S5, определенное максимальное значение с пороговым значением. Аналогично тому, что было рассмотрено выше, можно вначале определить максимальное значение сигналов, сформированных датчиками 5, а затем применить к этому максимальному значению этап S3 коррекции.
Согласно данному варианту, обрабатывающий блок 6 сравнивает сумму скорректированных значений (или соответственно скорректированных максимальных значений) сигналов одной и той же пары магнитных датчиков 5 с предварительно заданным пороговым значением. Когда указанная сумма (или соответственно скорректированное максимальное значение) превышает предварительно заданное пороговое значение, на шестом этапе S6 обрабатывающий блок 6 посылает инструкции для испускания тревожного сигнала (оптического, звукового и т.п.) по меньшей мере в один из излучателей 8. Как было указано выше, обрабатывающий блок 6 может посылать инструкции для испускания тревожного сигнала в излучатели 8 первого детектора 10 и/или второго детектора 20.
Фиг. 8а, 8b и 8с иллюстрируют интенсивность измеренного сигнала для четырех систем детектирования в зависимости от расстояния до детектора (детекторов).
Фиг. 8а иллюстрирует случай системы детектирования, отвечающей существующему уровню техники, содержащей два детектора, разделенные расстоянием 130 см. На данной фигуре представленная интенсивность соответствует максимальному значению сигналов, сформированных датчиками двух детекторов.
Фиг. 8b иллюстрирует случай системы 1 детектирования, отвечающей варианту осуществления настоящего изобретения, содержащей два детектора, разделенные расстоянием 130 см, и обрабатывающий блок. На данной фигуре представленная интенсивность соответствует среднему значению сигналов, сформированных датчиками двух детекторов.
Фиг. 8с иллюстрирует случай системы 1 детектирования, отвечающей варианту осуществления настоящего изобретения, содержащей два детектора, разделенные расстоянием 130 см, и обрабатывающий блок. На данной фигуре представленная интенсивность соответствует скорректированному среднему значению сигналов, сформированных датчиками двух детекторов
Из представленных кривых наглядно видно, что вычисление среднего значения, а если целесообразно - применение коэффициентов ослабления на этапе коррекции среднего значения, делает возможным выравнивание интенсивности сигнала между двумя детекторами системы детектирования по сравнению со случаем простого определения максимальных значений сигналов (фиг. 8а).
Пример
В нижеприведенной таблице 1 представлен пример сравнения детектирования одного и того же целевого объекта тремя конфигурациями системы детектирования, а именно: (i) системой 1 детектирования, содержащей только один детектор; (ii) системой 1 детектирования, соответствующей первому варианту осуществления изобретения, содержащей два детектора, разнесенных на 130 см, с вычислением среднего значения сигналов; и (iii) системой 1 детектирования, соответствующей второму варианту осуществления изобретения, содержащей два детектора, разнесенных на 130 см, с вычислением среднего значения сигналов и коррекцией указанного среднего значения для определения необходимости включения тревожного сигнала.
В данном примере чувствительность SE трех конфигураций системы детектирования была установлена на 85% (эквивалент 1400 мВ). Другими словами, чувствительность была задана так, чтобы предварительно заданное пороговое значение равнялось 1400 мВ. Параметры систем были заданы так, чтобы при указанной чувствительности, пронос сферы диаметром 75 мм на высоте 1 м от земли не запускал никакой тревожной сигнализации, когда сферу проносили на расстоянии 65 см от одиночного детектора (первая конфигурация (i)) или по середине между двумя детекторами (вторая и третья конфигурация ((ii) (iii)). Другими словами, диаметр 75 мм это предельный диаметр детектирования испытуемыми системами. Точнее, возмущение электромагнитного поля железной сферой диаметром 75 мм практически соответствует возмущению, которое создает в середине прохода автомат типа АК47.

В данной таблице «предельный диаметр [мм]» соответствует минимальному диаметру в миллиметрах, от которого испытуемая система 1 детектирования выдает тревожный сигнал.
Испытания показывают, что в случае, когда система 1 детектирования содержит два детектора образующих проход (конфигурации (ii) и (iii)), а обрабатывающий блок 6 вычисляет среднее значение сигналов, формируемых магнитными датчиками 5 указанных детекторов, система способна различать целевые объекты, магнитное поле которых эквивалентно полю железной сферы диаметром приблизительно 62 мм, и объекты меньшего размера, такие как смартфоны, даже если целевой объект находится на расстоянии 50 см от одного из детекторов (что на практике уже весьма далеко от середины прохода; при испытании детекторы были разнесены на 130 см друг от друга).
В случае, когда обрабатывающий блок 6 системы 1 детектирования дополнительно применяет этап S2 коррекции к среднему значению сигналов (конфигурация (iii)), система 1 детектирования дополнительно способна различать целевые объекты с магнитным полем, которое эквивалентно полю железной сферы диаметром приблизительно 64 мм, даже если целевой объект находится на расстоянии 25 см от одного из детекторов (т.е. очень близко к детектору, поскольку расстояние между детекторами при этом испытании составляет 130 см).
Следовательно, системы детектирования, соответствующие настоящему изобретению, (конфигурации (ii) и (iii)), способны различать объекты небольшого размера даже если эти объекты содержат магнитные компоненты (например, смартфоны) и целевые объекты большого объема, такие как автоматические винтовки, даже если досматриваемое лицо проходит не посередине между детекторами.
Изобретение также относится к случаю, когда система 1 детектирования содержит ряд детекторов, число которых равно трем или более трех, так что образовано множество проходов, причем два соседних прохода совместно используют один и тот же детектор. Далее будет описан пример способа детектирования целевого объекта, при котором используется такая система 1 детектирования.
Система детектирования 1 включает в себя три детектора, каждый из которых содержит два магнитных датчика 5 (фиг. 3). Другими словами, система 1 детектирования включает в себя первый, второй и третий детекторы 10, 20, 30, содержащие соответственно два первых, два вторых и два третьих магнитных датчика 5. Второй детектор 20 образует первый проход с первым детектором 10, и второй проход с третьим детектором 30. Следовательно, второй детектор 20 расположен между первым детектором 10 и третьим детектором 30.
Данные три детектора идентичны, и поэтому каждый содержит обрабатывающий блок 6 и коммуникационный интерфейс 7. Естественно, обрабатывающий блок 6, как вариант, мог бы быть расположен на расстоянии от детекторов, а не встроен в детекторы. В этом случае, сигналы, сформированные магнитными датчиками 5 заданного детектора, передаются на выносной обрабатывающий блок 6 посредством коммуникационных интерфейсов 7 детекторов, так что обрабатывающий блок применяет к сигналам алгоритм детектирования, а затем передает какие-либо инструкции для формирования тревожного сигнала излучателям 8 детекторов через их детекторы, через их соответствующие коммуникационные интерфейсы 7.
Естественно, с соответствующими изменениями изобретение применимо в случае, когда система содержит только два детектора, которые вместе образуют один проход, или большее число детекторов (например, n детекторов, где n - целое число), которые вместе образуют (n-1) проходов. Кроме того, детекторы могли бы содержать только один магнитный датчик 5 или более двух магнитных датчиков 5 (например, три магнитных датчика 5).
На предварительном этапе выполняют объединение в пары первого, второго и третьего детекторов 10, 20, 30 чтобы заставить их действовать совместно, и конфигурировать, так чтобы закрепить за каждым функцию в способе S детектирования. Например, для первого прохода первый детектор 10 может быть настроен в качестве ведущего детектора, в то время как детектор 20 - в качестве ведомого детектора. Для второго прохода детектор 20 настраивают в качестве ведущего детектора, в то время как детектор 30 - в качестве ведомого детектора. Во время объединения в пары средства идентификации каждого детектора системы (обычно их адрес) также вводят и сохраняют в памяти каждого из соседних детекторов. Таким образом, средства идентификации первого детектора 10 вводят во второй детектор 20, в то время как средства идентификации второго детектора 20 вводят в первый детектор 10, чтобы обеспечить возможность их работы в паре. Аналогично, средства идентификации второго детектора 20 вводят в третий детектор 30, в то время как средства идентификации третьего детектора 30 вводят во второй детектор 20.
На первом этапе по меньшей мере один из магнитных датчиков 5 - первый, второй или третий - регистрирует магнитное поле и формирует сигнал, представляющий интенсивность детектированного магнитного поля.
На практике все магнитные датчики 5 одного и того же прохода непрерывно или периодически генерируют сигнал, представляющий интенсивность детектированного магнитного поля, только мощность сигналов от каждого датчика 5 будет разной.
Далее, для иллюстрации этапов способа S будет рассмотрен пример, в котором сигнал формируется двумя вторыми магнитными датчиками 5 и двумя третьими магнитными датчиками 5.
Сигнал, сформированный магнитными датчиками 5, затем передается в обрабатывающий блок 6 ведущего детектора прохода, при необходимости посредством коммуникационных интерфейсов 7. В рассматриваемом примере сигнал, сформированный третьими магнитными датчиками 5, передается посредством коммуникационного интерфейса 7 третьего детектора 30 в обрабатывающий блок 6 второго детектора 20. Сигнал, сформированный вторыми магнитными датчиками 5, сам по себе передается напрямую в обрабатывающий блок 6 второго детектора 20 (при этом следует помнить, что этот сигнал передавался бы через коммуникационный интерфейс 7, если бы обрабатывающий блок 6 был внешним).
На втором этапе обрабатывающий блок 6 ведущего детектора рассматриваемого прохода (в данном случае второй детектор 20) вычисляет среднее значение сигналов PGS[2,3] (PGS - от англ. Pair Gate Signal - сигнал пары датчиков прохода), сформированных каждой парой магнитных датчиков 5. Следовательно, в данном случае обрабатывающий блок 6 вычисляет первое среднее значение, соответствующей первой из пар вторых и третьих магнитных датчиков 5, и второе среднее значение, соответствующее второй из пар.
Естественно, когда каждый детектор содержит только один датчик 5, обрабатывающий блок 6 вычисляет только одно среднее значение, соответствующее среднему значению сигналов указанных двух магнитных датчиков 5.
Как указывалось выше, обрабатывающий блок 6 может вычислять среднее арифметическое значение сигналов или, как вариант - среднее геометрическое значение.
Как вариант, вместо вычисления среднего значения сигналов каждой пары магнитных датчиков 5, обрабатывающий блок 6 может реализовать этап коррекции сигналов, сформированных каждым из магнитных датчиков 5 путем применения коэффициента ослабления указанных сигналов, а затем вычисление суммы значений скорректированных сигналов (или как вариант - определение максимального значения скорректированных сигналов для каждой пары датчиков 5. Поскольку данный этап коррекции был уже описан выше в отношении подэтапов S31-S35, он не будет здесь рассматриваться подробно. В ином варианте, обрабатывающий блок 6 может сразу вычислять среднее значение сигналов для каждой пары магнитных датчиков 5, и реализовать этап коррекции сигналов, как было описано выше, так чтобы получить скорректированное среднее значение.
Аналогично тому, что было описано выше, этап S2 коррекции может быть применен либо к сигналам, формируемым датчиками 5, или к сумме сигналов (или к их максимальному значению), либо же к среднему значению сигналов.
На третьем этапе, когда одно из значений PGS[2,3], вычисленных на втором этапе, превышает предварительно заданное пороговое значение, обрабатывающий блок 6 второго детектора 20 передает в обрабатывающий блок 6 первого детектора 10 с одной стороны указанное вычисленное значение PGS[2,3], а с другой стороны -сигналы, сформированные его вторыми магнитными датчиками 5.
На четвертом этапе, одновременно с третьим этапом, обрабатывающий блок 6 первого детектора 10 вычисляет значение PGS[1,2] на основе сигналов, сформированных для каждой пары магнитных датчиков 5 первого прохода. Вычисление указанного значения, выполняемое обрабатывающим блоком 6 первого детектора 10, такое же, что и вычисление, выполняемое обрабатывающим блоком 6 второго детектора 20. Другими словами, когда один из ведущих детекторов вычисляет среднее значение (или, соответственно, скорректированное среднее значение, значение, соответствующее сумме скорректированных значений, или максимальное скорректированное значение), другие ведущие детекторы выполняют такое же вычисление (соответственно, вычисление среднего значения, скорректированного среднего значения, значения, соответствующего сумме скорректированных значений, или максимального скорректированного значения).
В данном случае, обрабатывающий блок 6 первого детектора 10 вычисляет, например, первое среднее значение, соответствующее первой из пар первого и второго магнитных датчиков 5, и второе среднее значение, соответствующее второй паре, так чтобы получить средние значения сигналов.
Когда значение PGS[1,2], вычисленное первым детектором 10, меньше предварительно заданного порогового значения, обрабатывающий блок 6 первого детектора 10 не передает никаких инструкций в излучатели 8 первого детектора 10 или второго детектора 20 для формирования тревожного сигнала
С другой стороны, когда значение PGS[1,2], вычисленное первым детектором 10, больше предварительно заданного порогового значения, на пятом этапе обрабатывающий блок 6 первого детектора 10, как ведущего детектора первого прохода, определяет, был ли детектирован целевой объект в первом проходе (который образован первым и вторым детекторами 10, 20) или во втором проходе (который образован вторым и третьим детекторами 20, 30).
Для этого обрабатывающий блок 6 первого детектора 10 сравнивает значения PGS[2,3] (средние значения с коррекцией или без коррекции, сумму или максимальное скорректированное значение), вычисленные вторым детектором 20 со значениями PGS[1,2], вычисленными первым детектором 10.
С этой целью, на первом подэтапе обрабатывающий блок 6 первого детектора 10 умножает значение PGS[2,3], вычисленное на основе сигналов, сформированных вторым и третьим датчиками 5, на предварительно заданный коэффициент Ks безопасности: Ks* PGS[2,3]. Коэффициент безопасности больше или равен 1, например, равен 1,5 или 2.
Параллельно, на втором подэтапе, обрабатывающий блок 6 первого детектора 10 умножает значение PGS[1,2], вычисленное на основе сигналов, сформированных первым и вторым датчиками 5, на предварительно заданный коэффициент Ks безопасности: Ks*PGS[1,2]
На третьем подэтапе первый детектор 10 сравнивает значение PGS[1,2] со значением Ks*PGS[2,3], которое детектор вычислил на основе сигналов, сформированных вторым и третьим датчиками 5. Если значение PGS[1,2], вычисленное на основе сигналов, сформированных первым и вторым датчиками 5, меньше значения Ks*PGS[2,3], полученного путем умножения коэффициента безопасности Ks на значение, вычисленное на основе сигналов, сформированных вторым и третьим датчиками 5 (т.е., если PGS[1,2]<Ks*PGS[2,3]), обрабатывающий блок 6 первого детектора 10 аннулирует инструкции или не посылает никаких инструкций для формирования тревожного сигнала излучателями 8 первого и второго детекторов 10, 20.
Параллельно, на четвертом подэтапе, второй детектор 20 сравнивает значение PGS[2,3] со значением Ks*PGS[1,2], полученным путем умножения Ks на значение сигналов, сформированных первым и вторым датчиками 5. Если значение PGS[2,3], вычисленное на основе сигналов, сформированных вторым и третьим датчиками 5, меньше значения Ks*PGS[1,2], полученного путем умножения коэффициента Ks безопасности на значение, вычисленное на основе сигналов, сформированных первым и вторым датчиками 5 (т.е., если PGS[2,3]<Ks*PGS[1,2]) обрабатывающий блок 6 второго детектора 20 аннулирует инструкции или не посылает никаких инструкций для формирования тревожного сигнала излучателями 8 второго и третьего детекторов 20, 30. В противном случае, если PGS[2,3]>Ks*PGS[1,2], второй детектор 20 посылает инструкции для передачи тревожного сигнала излучателям 8 второго детектора 20 и третьего детектора 30.
Оператор может легко определить проход (в данном случае, второй), в котором детектирован целевой объект.
Следует отметить, что применение коэффициента Ks безопасности при сравнении значений, вычисленных детекторами, с любой стороны заданного прохода, создает запас при детектировании целевых объектов и снижает риск ложных срабатываний сигнализации.
Таким образом, передача ведомым детектором прохода ведущему детектору прохода вычисленного значения (среднего значения с коррекцией или без коррекции или суммы скорректированных значений) для соседнего прохода, для которого тот же детектор является ведущим, позволяет определять местоположение целевого объекта, который был детектирован. Следует помнить, что результат детектирования объекта посредством магнитных датчиков 5 является скалярной величиной, и что детектор, который совместно используется для двух соседних проходов (в данном случае второй детектор 20) не способен определить, с какой стороны расположен детектированный целевой объект.
Способ S детектирования может быть обобщен, чтобы охватить любую систему 1 детектирования, содержащую m детекторов, где m больше или равно 4, таким образом, чтобы образовать m-1 проходов, и чтобы у двух соседних проходов был один и тот же общий детектор.
Тогда способ S детектирования содержит этапы, такие же, как те, что были описаны выше в отношении системы 1 детектирования с тремя детекторами. Однако, в данном случае, когда детектор n-1 вычисляет значение PGS[n-1; n] большее, чем предварительно заданное пороговое значение AT, способ S детектирования содержит дополнительно к этапам сравнения значения PGS[n-1; n] со значением, вычисленным детектором n-2 (PGS[n-2; n-1]), этап сравнения данного значения PGS[n-1; n] со значением, вычисленным детектором n (PGS[n; n+1]), чтобы определить проход, в котором был детектирован целевой объект (см. фиг 7). При необходимости, на этапе сравнения к значению PGS[n; n+1] применяется коэффициент Ks (Ks>1) безопасности.
Например, детектор n-1 вычисляет заданное значение PGS[n-1; n], обычно среднее значение (при необходимости скорректированное) на основе сигналов, сформированных магнитными датчиками 5 детекторов n и n-1. Детектор n-1 (как ведомый детектор) затем посылает это вычисленное значение PGS[n-1; n] в детектор n-2 (как ведущий детектор), а также значения сигналов, сформированных магнитными датчиками 5. Детектор n-2 затем вычисляет PGS[n-2; n-1], в данном случае среднее значение (при необходимости скорректированное) на основе значений сигналов, сформированных магнитными датчиками 5 детекторов n-2 и n-1. Таким же образом детектор n (как ведомый детектор детектора n-1) вычисляет и посылает вычисленное значение PGS[n; n+1] в детектор n-1, а также значения сигналов, формированных магнитными датчиками 5. Если значение, вычисленное детектором n-2 (как ведущим детектором) больше предварительно заданного порогового значения, то:
- детектор n-2:
• умножает значение PGS[n-1; n], вычисленное и переданное детектором n-1, на коэффициент Ks безопасности и
• сравнивает значение PGS[n-2; n-1], которое детектор вычислил со значением Ks*PGS[n-1; n], которое детектор получил умножением. Если значение PGS[n-2; n-1], которое детектор вычислил, меньше значения, вычисленного детектором n-1 и умноженного на коэффициент Ks (т.е., если PGS[n-2; n-1]<Ks*PGS[n-1; n], детектор n-2 устанавливает, что никакого тревожного сигнала не должно быть сформировано от прохода, который образован детекторами n-2 и n-1. Поэтому, детектор n-2 не посылает никаких инструкций для формирования тревожного сигнала излучателями 8 детекторов n-2 и n-1 (или при необходимости аннулирует инструкции для запуска тревожного сигнала).
- детектор n-1 параллельно:
• умножает значение PGS[n-2; n-1], вычисленное и переданное детектором n-2, на коэффициент Ks безопасности и
• сравнивает значение PGS[n-1; n], которое детектор вычислил со значением Ks*PGS[n-2; n-1], которое детектор получил умножением.
Если значение PGS[n-1; n], которое детектор вычислил, меньше значения, вычисленного детектором n-2 и умноженного на коэффициент Ks (т.е., если PGS[n-1; n]<Ks*PGS[n-2; n-1], детектор n-1 устанавливает, что никакого тревожного сигнала не должно быть сформировано от прохода, который образован детекторами n-1 и n. Поэтому, детектор n-1 не посылает никаких инструкций для формирования тревожного сигнала излучателями 8 детекторов n-1 и n (или при необходимости аннулирует инструкции для запуска тревожного сигнала).
• умножает значение PGS[n; n+1], вычисленное и переданное детектором n, на коэффициент Ks безопасности и
• сравнивает значение PGS[n-1; n], которое детектор вычислил со значением Ks*PGS[n; n+1], которое детектор получил умножением.
Если значение PGS[n-1; n], которое детектор вычислил, меньше значения, вычисленного детектором n и умноженного на коэффициент Ks (т.е., если PGS[n-1; n]<Ks*PGS[n; n+1], детектор n-1 устанавливает, что никакого тревожного сигнала не должно быть сформировано от прохода, который образован детекторами n-1 и п. Поэтому, детектор n-1 не посылает никаких инструкций для формирования тревожного сигнала излучателями 8 детекторов n-1 и n (или при необходимости аннулирует инструкции для запуска тревожного сигнала).
- детектор n параллельно:
• умножает значение PGS[n-1; n], вычисленное и переданное детектором n-1, на коэффициент Ks безопасности и
• сравнивает значение PGS[n; n+1], которое детектор вычислил со значением Ks*PGS[n-1; n], которое детектор получил умножением.
Если значение PGS[n; n+1], которое детектор вычислил, меньше значения, вычисленного детектором n-1 и умноженного на коэффициент Ks (т.е., если PGS[n; n+1]<Ks*PGS[n-1; n], детектор n устанавливает, что никакого тревожного сигнала не должно быть сформировано от прохода, который образован детекторами n и n+1. Поэтому, детектор n не посылает никаких инструкций для формирования тревожного сигнала излучателями 8 детекторов n и n+1 (или при необходимости аннулирует инструкции для запуска тревожного сигнала).
Следует отметить, что, когда соседние проходы не используют совместно один и тот же детектор, а каждый проход образован двумя отдельными детекторами, детектирование в пределах каждого прохода выполняется парами детекторов. Таким образом, детекторы заданного прохода не обязательно ведут обмен данными с детекторами соседнего прохода. Это потому, что каждый проход может работать независимо, поскольку не обязательно определять проход, через который пронесли целевой объект.


Изобретение относится к системе (1) детектирования целевых объектов, содержащей: первый и второй детекторы (10, 20), которые содержат магнитные датчики (5), выполненные с возможностью детектирования магнитного поля и формирования сигнала, представляющего интенсивность магнитного поля; обрабатывающий блок (6), выполненный с возможностью приема сигналов, представляющих интенсивность магнитного поля и детектированных указанными датчиками (5); и коммуникационный интерфейс (7), выполненный с возможностью передачи сигналов, сформированных магнитными датчиками (5), в обрабатывающий блок (6). Обрабатывающий блок (6) с возможностью определения среднего значения сигналов, формируемых магнитными датчиками (5) первого и второго детекторов (10, 20), и с возможностью передачи инструкций для формирования тревожного сигнала, когда указанное среднее значение превышает предварительно заданное пороговое значение. Технический результат: обеспечение возможности надежно различать небольшие объекты, содержащие магнитные компоненты, такие как смартфоны, и автоматические винтовки, при приемлемых размерах. 2 н. и 17 з.п. ф-лы, 8 ил.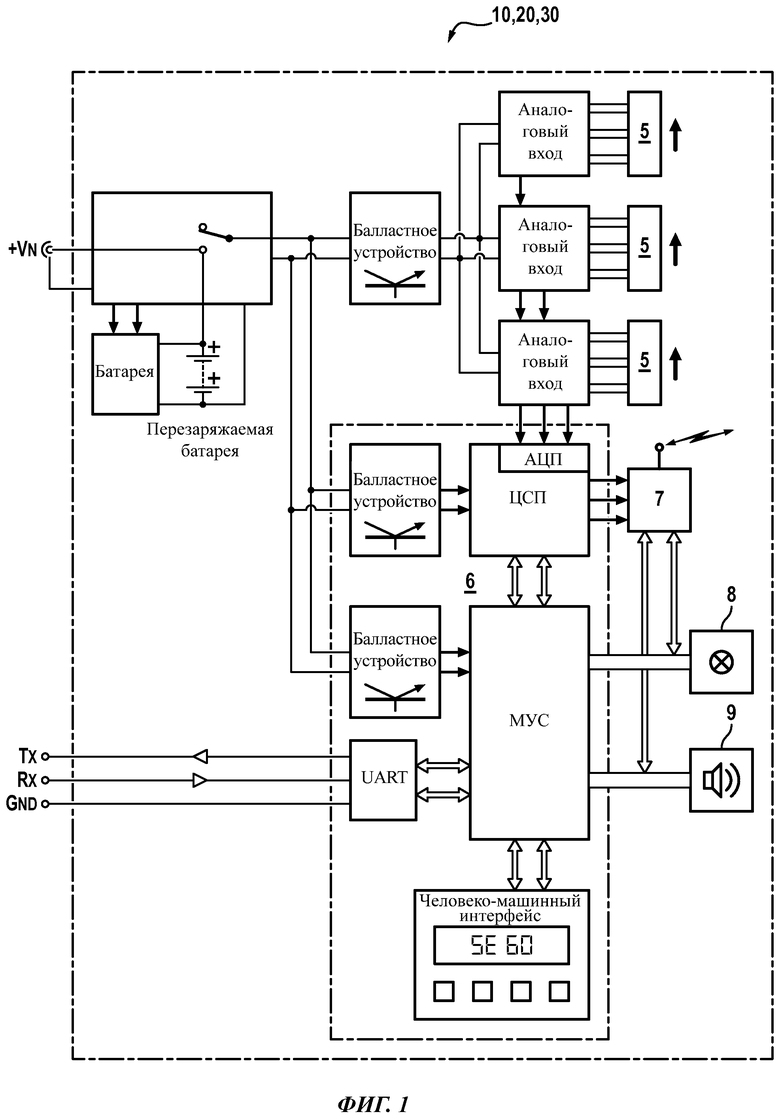
1. Система (1) детектирования целевого объекта, содержащего намагниченные или ферромагнитные компоненты, содержащая:
- первый детектор (10), содержащий по меньшей мере первый магнитный датчик (5), выполненный с возможностью формирования сигнала, представляющего интенсивность детектированного магнитного поля,
- второй детектор (20), отдельный от первого детектора (10) и содержащий по меньшей мере второй магнитный датчик (5), выполненный с возможностью формирования сигнала, представляющего интенсивность детектированного магнитного поля, и
- обрабатывающий блок (6), выполненный с возможностью приема сигналов, представляющих интенсивность магнитного поля, детектированного первым магнитным датчиком (5) и вторым магнитным датчиком (5),
отличающаяся тем, что:
- дополнительно содержит по меньшей мере один коммуникационный интерфейс (7), выполненный с возможностью передачи сигнала, сформированного первым и вторым магнитными датчиками (5), в обрабатывающий блок (6), при этом
- обрабатывающий блок (6) выполнен с возможностью определения среднего значения сигналов, сформированных магнитными датчиками (5) первого и второго детекторов (10, 20), и передачи инструкций для формирования тревожного сигнала, когда указанное среднее значение сигналов превышает предварительно заданное пороговое значение.
2. Система (1) детектирования по п. 1, в которой обрабатывающий блок (6) выполнен с возможностью определения среднего арифметического или среднего геометрического значения сигналов.
3. Система (1) детектирования по п. 1 или 2, в которой коммуникационный интерфейс (7) является беспроводным коммуникационным интерфейсом.
4. Система (1) детектирования по любому из пп. 1-3, в которой первый и второй детекторы (10, 20) являются переносными.
5. Система (1) детектирования по любому из пп. 1-4, дополнительно содержащая третий детектор (30), причем:
- третий детектор (30) содержит по меньшей мере один третий магнитный датчик (5), выполненный с возможностью детектирования магнитного поля и формирования сигнала, представляющего интенсивность детектированного магнитного поля,
- первый детектор (10) и второй детектор (20) образуют первый проход, а второй детектор (20) и третий детектор (30) вместе образуют второй проход.
6. Система (1) детектирования по п. 5, в которой:
- обрабатывающий блок (6) размещен в каждом из первого и второго детекторов (10, 20), при этом
- обрабатывающий блок (6), размещенный во втором детекторе (20), выполнен с возможностью, с одной стороны, вычисления среднего значения сигналов, сформированных магнитными датчиками (5) второго и третьего детекторов (20, 30), и, с другой стороны, передачи в обрабатывающий блок (6) первого детектора (10) через коммуникационный интерфейс (7) сигнала, представляющего интенсивность магнитного поля, детектированного вторым магнитным датчиком (5), и вычисленного среднего значения сигналов.
7. Способ (S) детектирования целевого объекта, содержащего намагниченные или ферромагнитные компоненты, с помощью системы (1) детектирования по любому из пп. 1-6, содержащий следующие этапы:
S1: формирование посредством первого и второго магнитных датчиков (5) сигнала, представляющего интенсивность магнитного поля;
S2: вычисление среднего значения сигналов, сформированных первым и вторым магнитными датчиками;
S4: сравнение указанного среднего значения с предварительно заданным пороговым значением; и
S5: когда среднее значение превышает предварительно заданное пороговое значение, отправление инструкций для формирования тревожного сигнала.
8. Способ (S) детектирования по п. 7, дополнительно содержащий, перед этапом S4, этап S3 коррекции среднего значения, вычисленного на этапе S2, так чтобы получить среднее значение, скорректированное применением коэффициента ослабления к среднему значению этапа S2, при этом указанное скорректированное среднее значение используют для реализации этапа S4.
9. Способ (S) детектирования по п. 8, в котором этап S3 коррекции содержит следующие подэтапы:
S31: определение максимального значения сигнала, сформированного первым магнитным датчиком (5) и вторым магнитным датчиком (5),
S32: определение минимального значения сигнала, сформированного первым магнитным датчиком (5) и вторым магнитным датчиком (5),
S33: вычисление отношения определенного максимального значения к определенному минимальному значению,
S34: сравнение отношения с первым порогом и вторым порогом, причем второй порог выше первого порога, и
S35: выведение коэффициента ослабления, при этом коэффициент ослабления равен:
- первому значению, когда отношение меньше первого порога,
- второму значению, отличающемуся от первого значения, когда отношение больше второго порога, и
- значению между первым значением и вторым значением, когда отношение лежит между первым порогом и вторым порогом.
10. Способ (S) детектирования по п. 9, в котором коэффициент ослабления является линейной функцией, зависящей от указанного отношения, когда отношение лежит между первым порогом и вторым порогом.
11. Способ (S) детектирования по п. 9 или 10, в котором первое значение равно 1, второе значение равно 0,1, а коэффициент ослабления определяют из следующего выражения, когда значение отношения лежит между первым порогом и вторым порогом:
0,03*R+1,9,
где R - значение отношения.
12. Способ (S) детектирования по любому из пп. 7-11, в котором первый детектор (10) содержит по меньшей мере два первых магнитных датчика (5), а второй детектор (20) содержит по меньшей мере два вторых магнитных датчика (5), причем каждый первый магнитный датчик (5) связан с заданным вторым магнитным датчиком (5), так чтобы образовалась пара, при этом к каждой паре применимы этапы S1-S4.
13. Способ (S) детектирования по любому из пп. 7-12, в котором система (1) детектирования дополнительно содержит третий детектор (30), содержащий по меньшей мере один третий магнитный датчик (5), выполненный с возможностью детектирования магнитного поля и формирования сигнала, представляющего интенсивность детектированного магнитного поля, при этом способ (S) дополнительно содержит, перед этапом S5 формирования тревожного сигнала, этап вычисления среднего значения сигналов, сформированных вторым и третьим магнитными датчиками (5).
14. Способ (S) детектирования по п. 13, дополнительно содержащий, после этапа вычисления среднего значения сигналов, сформированных вторым и третьим магнитными датчиками (5), этап установления на основе среднего значения сигналов, сформированных первым и вторым магнитными датчиками (5), и среднего значения сигналов, сформированных вторым и третьим магнитными датчиками (5), прохода или проходов, образованных первым детектором (10) и вторым детектором (20), с одной стороны, и вторым детектором (20) и третьим детектором (30), с другой стороны, которые детектировали магнитное поле.
15. Способ (S) детектирования по п. 14, в котором этап установления прохода или проходов содержит следующие подэтапы:
- умножение среднего значения, вычисленного на основе сигналов второго и третьего датчиков (5), на коэффициент (Ks) безопасности,
- сравнение среднего значения, вычисленного на основе сигналов первого и второго датчиков (5), со средним значением, вычисленным на основе сигналов второго и третьего датчиков (5) и умноженным на коэффициент (Ks) безопасности,
- умножение среднего значения, вычисленного на основе сигналов первого и второго датчиков (5), на коэффициент (Ks) безопасности,
- сравнение среднего значения, вычисленного на основе сигналов второго и третьего датчиков (5), со средним значением, вычисленным на основе сигналов первого и второго датчиков (5) и умноженным на коэффициент (Ks) безопасности.
16. Способ (S) детектирования по п. 15, в котором:
- этап S5 реализуют только первым и вторым детектором (10, 20), если среднее значение, вычисленное на основе сигналов, сформированных первым и вторым датчиками (5), больше среднего значения, вычисленного на основе сигналов, сформированных вторым и третьим датчиками (5), и умноженного на коэффициент (Ks) безопасности,
- этап S5 реализуют только вторым и третьим детектором (20, 30), если среднее значение, вычисленное на основе сигналов, сформированных вторым и третьим датчиками (5), больше среднего значения, вычисленного на основе сигналов, сформированных первым и вторым датчиками (5), и умноженного на коэффициент (Ks) безопасности.
17. Способ (S) детектирования по любому из пп. 14-16, в котором каждый из первого детектора (10) и второго детектора (20) содержит обрабатывающий блок (6), причем:
- этап вычисления среднего значения сигналов, сформированных вторым и третьим магнитными датчиками (5), выполняют посредством обрабатывающего блока (6) второго детектора (20),
- этап вычисления среднего значения сигналов, сформированных первым и вторым магнитными датчиками (5), выполняют посредством обрабатывающего блока (6) первого детектора (10), и
- этап установления пары или пар детекторов (10, 20, 30), которые детектировали магнитное поле, выполняют посредством обрабатывающего блока (6) второго детектора (20) и посредством обрабатывающего блока (6) первого детектора (10).
18. Способ (S) детектирования по п. 15, в котором система (1) детектирования дополнительно содержит четвертый детектор (n+1), содержащий по меньшей мере один четвертый магнитный датчик (5), выполненный с возможностью детектирования магнитного поля и формирования сигнала, представляющего интенсивность детектированного магнитного поля, при этом способ (S) детектирования дополнительно содержит следующие подэтапы:
- вычисление среднего значения сигналов, сформированных третьим и четвертым магнитными датчиками (5),
- умножение среднего значения сигналов, сформированных третьим и четвертым магнитными датчиками (5), на коэффициент (Ks) безопасности,
- сравнение среднего значения сигналов, сформированных вторым и третьим магнитными датчиками, со средним значением сигналов, сформированных третьим и четвертым магнитными датчиками (5), умноженным на коэффициент (Ks) безопасности,
- сравнение среднего значения сигналов, сформированных третьим и четвертым магнитными датчиками, со средним значением сигналов, сформированных вторым и третьим магнитными датчиками (5), умноженным на коэффициент (Ks) безопасности,
- установление пары или пар детекторов среди первого, второго, третьего и четвертого детекторов (10, 20, 30, n+1), которые детектировали магнитное поле.
19. Способ (S) детектирования по п. 18, в котором
- этап S5 реализуют только вторым и третьим детектором (20, 30), если среднее значение сигналов, сформированных вторым и третьим датчиками (5), больше среднего значения сигналов, сформированных третьим и четвертым магнитными датчиками (5), умноженного на коэффициент (Ks) безопасности, и
- этап S5 реализуют только третьим и четвертым детекторами (30, n+1), если среднее значение сигналов, сформированных третьим и четвертым датчиками (5), больше среднего значения сигналов, сформированных вторым и третьим датчиками (5), умноженного на коэффициент (Ks) безопасности.
| WO 2011020148 A1, 24.02.2011 | |||
| WO 2017141022 A1, 24.08.2017 | |||
| US 2006197523 A1, 07.09.2006 | |||
| СПОСОБ СОВМЕСТНОЙ РАЗРАБОТКИ НЕФТЯНЫХ И КАЛИЙНЫХ МЕСТОРОЖДЕНИЙ | 2003 |
|
RU2244107C1 |
| WO 2013001292 A2, 03.01.2013 | |||
| US 3971983 A1, 27.07.1976 | |||
| СИСТЕМЫ ОБНАРУЖЕНИЯ | 2008 |
|
RU2460098C2 |

