Область техники, к которой относится изобретение
Изобретение относится к области детекторов, предназначенных для обнаружения запрещенных предметов (объектов) или веществ в зонах с ограничением доступа.
Настоящее изобретение, в частности, относится к области сканеров всего тела, предназначенных для досмотра людей, например, пассажиров перед посадкой в аэропортах или людей, посещающих общественное место, например, спортивное сооружение, такое как стадион, или концертный зал, с целью обнаружения запрещенных предметов, спрятанных под одеждой. Такие устройства дают возможность, в частности, отказаться от систематического ощупывания посетителей.
Уровень техники
Досмотр людей, в частности, пассажиров в аэропортах, выполняют традиционно, используя проходные (арочные) металлодетекторы, принцип обнаружения которых основан на индукционном поле, создаваемом катушками. Такие проходные металлодетекторы адаптированы для обнаружения металлических предметов, представляющих угрозу, таких как огнестрельное оружие, гранаты, ножи или любые другие потенциально опасные предметы.
Широкое применение проходных металлодетекторов уходит корнями в 70-е годы прошлого века.
Если в прошлом искомые предметы представляли собой главным образом огнестрельное оружие среднего размера, обычно выполненное из магнитных металлов, то новые виды агрессивных действий, и постоянное усовершенствование оружия привели к росту требований к обнаружению, которые охватывают ножи и оружие из легких сплавов, и иные подобные малогабаритные предметы.
Несмотря на уменьшение размеров искомых предметов, самые последние и совершенные металлодетекторы, в которых по-прежнему реализовано обнаружение, основанное на индукционных полях, позволяют выполнять быстрый и эффективный досмотр пассажиров в полностью автоматическом режиме обнаружения, с полным охватом досматриваемого человека при невысокой доле ложных тревожных сигналов, типично менее 10%, при действующих в настоящее время процедурах контроля.
Обработку тревожных сигналов осуществляет уполномоченный персонал путем ощупывания или вторичного досмотра при помощи портативного металлодетектора.
Кроме того, применение слабого низкочастотного неионизирующего магнитного поля отвечает самым строгим требованиям в отношении воздействия на человека электромагнитных полей, в частности, если принять во внимание особые ограничения для детей и беременных женщин.
Однако, известно, что попытки использования средств нападения других видов, например, взрывчатых веществ, сделали необходимым иметь дополнительные особые средства обнаружения, специально для неметаллических материалов.
Металлодетекторы не приспособлены для обнаружения неметаллических предметов, поскольку низкочастотное магнитное поле не может эффективно взаимодействовать с немагнитными предметами, которые не обладают электропроводностью.
По этой причине ведутся разработки оборудования новых видов, которые в общем называют «сканерами всего тела» или досмотровыми сканерами, или усовершенствованными устройствами обработки изображений, УУОИ (AIT, англ. Advanced Imaging Technology).
В указанных сканерах всего тела используется формирование изображений, основанное на применении микроволнового излучения (СВЧ-излучения).
Сканеры всего тела приспособлены к голографической реконструкции микроволнового изображения поверхности тела исследуемого человека с целью обнаружения металлических или неметаллических объектов, образующих посторонний предмет.
Хотя сканеры всего тела и повышают уровень безопасности, создавая изображение неметаллических объектов, хорошо известно, что микроволновые досмотровые системы, используемые в сканерах всего тела, имеют ограничения, присущие используемым физическим принципам, в частности, невозможность проникать под кожу, и, следовательно, обследовать полости организма и внутренность обуви, а также трудность получения удовлетворительных изображений периферических областей тела, которые плохо облучаются микроволновыми передатчиками, или которые дают отраженные сигналы, ограниченные приемными антеннами.
Кроме того, если требуется применить одни и те же критерии обнаружения для металлических частей малого размера, которые корректно обнаруживаются высококачественными проходными металлодетекторами с низким уровнем тревожных сигналов, необходимо иметь высокочувствительные сканеры всего тела, что соответствует исключительно высокому уровню тревожных сигналов для указанных сканеров всего тела.
Статистика показывает, что доля ложных тревожных сигналов для сканеров всего тела составляет величину в интервале от 65% до 85%, включая новейшие и эффективные алгоритмы.
Было отмечено, что для известного уровня техники доля ложных тревожных сигналов, поступающих от сканеров всего тела, определенно выше, чем доля неуместных тревожных сигналов, поступающих от проходных металлодетекторов.
Из вышесказанного следует, и часто можно видеть, что большинство пассажиров, проходящих через сканер всего тела, вынуждены подвергаться процедурам ручного ощупывания, что создает длинные очереди и очевидно приводит к неудобствам и снижению безопасности как досматриваемых лиц, так и ответственного персонала.
В патентном документе ЕР 1750147 на имя настоящего заявителя раскрыта система обнаружения, содержащая средства обнаружения индукционного типа, связанная с дополнительными средствами обнаружения. В данном документе, в частности, предложено использовать одновременно и внутри одной и той же системы индукционные средства обнаружения и гамма/рентгеновский детектор в зависимости от обнаружения, выполняемого соответствующими индукционными средствами, причем модификация средств обнаружения выполняется в режиме реального времени, когда досматриваемое лицо проходит через систему.
В документе ЕР 2854217 раскрыта система обнаружения, содержащая средства обнаружения, основанные на микроволновой визуализации,. В данной системе передающая антенна размещена в одной панели, в то время как приемная антенна размещена в противоположной панели.
В документе US 2009/322872 описана микроволновая система, создающая изображение досматриваемого человека в миллиметровом диапазоне длин волн.
В документе WO 2018/225028 описана досмотровая система, содержащая с одной стороны сканер всего тела, а с другой стороны устройство обнаружения для обуви.
Раскрытие изобретения
В данном контексте одна задача изобретения заключается в том, чтобы предложить новые средства усовершенствования рабочих характеристик сканеров всего тела.
Первая задача изобретения, в частности, состоит в том, чтобы предложить новый сканер всего тела, который позволяет производить досмотр людей, благодаря оптимизации характеристик распознавания, т.е. оптимизации пропускной способности потоков людей, вовлеченных в досмотр.
Вторая задача изобретения, в частности, состоит в том, чтобы предложить новый сканер всего тела, который позволяет производить досмотр людей, благодаря оптимизации безопасности и характеристик распознавания, т.е. оптимизации производительности обнаружения и потоков людей, вовлеченных в досмотр.
Поставленные задачи решаются, согласно настоящему изобретению, посредством системы обнаружения, соответствующей п. 1 формулы изобретения, и способа обнаружения, соответствующего п. 13 формулы.
Зависимые пункты формулы изобретения определяют варианты осуществления изобретения.
В частности, система обнаружения содержит индукционные средства обнаружения, средства обнаружения, основанные на микроволновой визуализации (основанные на формировании микроволнового изображения), средства анализа, выполненные с возможностью анализа сигналов, поступающих от индукционных средств обнаружения, и определения по указанным сигналам потенциального присутствия металлических объектов, а также средства, предназначенные для соответствующего изменения, по меньшей мере в одной интересующей области, чувствительности средств обнаружения, основанных на микроволновой визуализации.
Следует отметить, что изменение чувствительности средств обнаружения, основанных на микроволновой визуализации, может быть, в частности, выполнено путем изменения параметров обработки изображения при помощи средств анализа, например, с использованием классификации, следуя нейронной логике. Согласно примеру, который не носит ограничительного характера, чувствительность средств обнаружения, основанных на микроволновой визуализации, может быть изменена путем изменения порога (многомерного, когда одновременно производится изменение нескольких параметров обработки изображения), исходя из которого средства анализа посылают инструкции для формирования тревожного сигнала (звукового и/или оптического) в соответствующее предупреждающее устройство в зависимости от сигналов, формируемых индукционными средствами обнаружения.
Способ обнаружения запрещенных предметов с использованием сканера всего тела содержит этапы:
- досмотра человека с применением двойной технологии, содержащей анализ с использованием индукционных средств обнаружения и анализ с использованием средств обнаружения, основанных на микроволновой визуализации;
- анализа сигнала, поступающего от индукционных средств обнаружения; и
- изменения чувствительности средств обнаружения, основанных на микроволновой визуализации, когда индукционные средства обнаружения выявляют потенциальное присутствие металлического объекта.
Точнее, в границах объема настоящего изобретения, чувствительность средств обнаружения, основанных на микроволновой визуализации, переводят на высокий уровень, когда индукционные средства обнаружения выявляют возможное присутствие металлического объекта, и наоборот, переводят на более низкий уровень, когда индукционные средства обнаружения не выявляют возможного присутствия металлического объекта.
Таким образом, в границах объема настоящего изобретения, если индукционные средства обнаружения не выявляют потенциального присутствия металлических объектов, чувствительность средств обнаружения, основанных на микроволновой визуализации, может оставаться сравнительно низкой, на уровне, достаточном для обнаружения неметаллических объектов. Следует особо отметить, что изменение чувствительности средств, основанных на микроволновой визуализации, не производится во время приема микроволновых сигналов, а выполняется во время обработки указанных сигналов средствами анализа.
Обычно высокая доля ложных тревожных сигналов, вызванных использованием средств обнаружения, основанных на микроволновой визуализации, (как отмечалось выше, порядка 65-85%), согласно настоящему изобретению ограничивается только случаями предварительного обнаружения металлического объекта при помощи индукционного металлодетектора (сами средства, основанные на микроволновой визуализации, дают порядка 10%), при этом суммарная интенсивность появления ложных тревожных сигналов, вызванных работой сканера всего тела, согласно настоящему изобретению, сравнительно мала. Что касается остальных 90% досматриваемых людей, на ком металлодетектор не выявил присутствия металлических объектов, то обработка микроволновых сигналов средствами анализа сканера всего тела в действительности выполняется путем установки чувствительности на низкий уровень. Таким образом, общая доля ложных тревожных сигналов, поступающих от сканера всего тела, согласно настоящему изобретению, типично попадает в интервал от 10 до 20%.
Специалистам в данной области должно быть понятно, что управление чувствительностью средств обнаружения, основанных на микроволновой визуализации, путем увеличения чувствительности указанных средств, образующих сканер всего тела, только в случаях, когда пред этим средствами металлодетектора был обнаружен металлический объект, позволяет значительно снизить общую долю ложных тревожных сигналов системы, соответствующей настоящему изобретению.
Статистически, можно считать, что если обнаружение металла индукционными средствами происходит менее, чем у 10% досматриваемых людей, то по меньшей мере 90% людей, проходящих досмотр, будут обследованы только на предмет присутствия неметаллических (диэлектрических) подозрительных объектов микроволновым сканером всего тела при уменьшенной чувствительности средств, основанных на микроволновой визуализации, что приводит к весьма значительному общему снижению доли ложных тревожных сигналов.
Из этого следует, что в отличие от того, что было описано в документе ЕР 1750147, изменение чувствительности дополнительных средств обнаружения (средств, основанных на микроволновой визуализации) производится не путем изменения уровня срабатывания тревожного сигнала, а выполняется путем изменения обработки сигналов, поступающих от средств обнаружения, основанных на микроволновой визуализации, с целью изменения микроволнового изображения на выходе.
На практике оператор может на одном экране наблюдать изображение результата работы индукционных средств обнаружения, целью которых является поиск металлических объектов, и результирующее изображение от средств обнаружения, основанных на микроволновой визуализации.
Краткое описание чертежей
Прочие характеристики, задачи и преимущества настоящего изобретения должным быть понятны из последующего подробного описания и прилагаемых чертежей, которые приведены в качестве примеров, не имеющих ограничительного характера, среди которых:
фиг. 1 схематически в аксонометрии изображает систему анализа, соответствующую настоящему изобретению,
фиг. 2а, 2b, 2с, 2d, 2е и 2f схематически представляют горизонтальные проекции с разрезом одной и той же системы обнаружения, соответствующей настоящему изобретению, согласно шести соответствующим примерам осуществления настоящего изобретения,
фиг. 3 представляет в соответствии с настоящим изобретением общую блок-схему работы системы анализа, осуществляющей обнаружение металлических объектов индукционными средствами, которые позволяют выявлять присутствие металлических объектов, и влияющей на чувствительность средств обнаружения, основанных на микроволновой визуализации,
фиг. 4 представляет блок-схему аналогичную фиг.3, более подробную, с соответствующей иллюстрацией последовательного расположения досматриваемого человека в различных частях системы анализа, на четырех последовательных этапах, изображенных на фиг.4а, 4b, 4с и 4d, в случае выявления металлических объектов индукционными средствами одномерного обнаружения,
фиг. 5 представляет картину аналогичную фиг.4, примененную к блок-схеме, где использованы индукционные средства трехмерного обнаружения, с соответствующей иллюстрацией последовательного расположения досматриваемого человека в различных частях системы анализа, на четырех последовательных этапах, изображенных на фиг.5а, 5b, 5с и 5d,
фиг. 6 представляет вариант блок-схемы в предположении совмещения средств обнаружения, основанных на микроволновой визуализации, с индукционными средствами одномерного обнаружения, с соответствующей иллюстрацией последовательного расположения досматриваемого человека в различных частях системы анализа, на четырех последовательных этапах, изображенных на фиг.6а, 6b, 6с и 6d,
фиг. 7 представляет вариант блок-схемы в предположении совмещения средств обнаружения, основанных на микроволновой визуализации, с индукционными средствами трехмерного обнаружения, с соответствующей иллюстрацией последовательного расположения досматриваемого человека в различных частях системы анализа, на четырех последовательных этапах, изображенных на фиг.7а, 7b, 7с и 7d, и
фиг.8 представляет другой вариант блок-схемы в предположении совмещения средств обнаружения, основанных на микроволновой визуализации, с индукционными средствами трехмерного обнаружения, которым предшествуют индукционные средства одномерного обнаружения, с соответствующей иллюстрацией последовательного расположения досматриваемого человека в различных частях системы анализа, на четырех последовательных этапах, изображенных на фиг.8а, 8b, 8с и 8d.
Осуществление изобретения
Как было отмечено выше, настоящее изобретение относится к системе 1 для обнаружения запрещенных предметов или веществ в зоне с защищенным доступом, содержащей индукционные средства 100 обнаружения и средства 10 обнаружения, основанные на микроволновой визуализации, связанные со средствами 50 анализа, приспособленными для анализа сигналов, поступающих от индукционных средств 100 обнаружения, и в силу этого снижающих потенциальную возможность присутствия металлических предметов, и адаптированными для соответствующего изменения, по меньшей мере в одной интересующей зоне, чувствительности средств 10 обнаружения, основанных на микроволновой визуализации.
Можно отметить, что сочетание индукционных средств 100 (металлодетектора) и средств 10 обнаружения, основанных на микроволновой визуализации являются взаимоусиливающим. В частности, средства 10 обнаружения, основанные на микроволновой визуализации, не способны различить или определить, является ли выявленный искомый предмет выполненным из металла или диэлектрического материала. Действительно, реакция системы одинакова в обоих случаях. Из этого следует, что применение системы, в которой использованы и индукционные средства, и средства обнаружения, основанные на микроволновой визуализации, дополнительно к повышению безопасности и снижению частоты появления неуместных тревожных сигналов, также позволяет характеризовать состав искомого предмета, отображаемого средствами 10 обнаружения, основанными на микроволновой визуализации.
Средства 30 анализа могут, в частности, представлять собой процессор, микропроцессор, компьютер типа микроконтроллера, предназначенный для исполнения инструкций.
Точнее, на фиг.1 представлено соответствующее изобретению устройство, представляющее собой сочетание сканера 10 всего тела, образующего средства 10 обнаружения, основанные на микроволновой визуализации, и металлодетектора 100, образующего индукционное средство обнаружения.
Другими словами, согласно настоящему изобретению, сканер 10 всего тела объединяет в себе металлодетектор 100.
Общая конструкция сканера 10 всего тела и индукционных средств 100 обнаружения может быть предметом любого известного варианта осуществления изобретения. Поэтому в дальнейшем конструкция в целом подробно рассматриваться не будет.
В качестве примера, не носящего ограничительного характера, сканер 10 всего тела может соответствовать положениям документа ЕР-2202700.
Сканер всего тела действует главным образом путем измерения энергии микроволнового излучения, отраженной и/или поглощенной, которая зависит от свойств исследуемых материалов, в частности, от комплексной диэлектрической проницаемости.
Индукционный металлодетектор 100 в предпочтительном варианте выполнен в виде проходного детектора или детектора подобной конструкции, содержащего две вертикальные стойки 110, 120, соединенные перекладиной 16.
Средства 50 анализа могут быть размещены где угодно в корпусе детекторов 10 и 100, например на перекладине 16
Металлодетектор 100 предпочтительно расположен на входе в сканер 10 всего тела, как показано на фиг.1. Металлодетектор определяет канал или проход 102, через который должен пройти любой человек, чтобы попасть в сканер 10 всего тела. Канал или проход 102 обрамлен двумя боковыми панелями, соответственно, 110 и 120, встроенными в вертикальные стойки.
В боковых панелях 110, 120 размещены средства 140, образующие металлодетектор. Указанные средства 140 предпочтительно выполнены в виде катушек, помещенных соответственно в панели 110, 120.
Технология металлодетектора, основанного на применении катушек, хорошо известна специалистам в данной области, и поэтому далее подробно рассматриваться не будет.
Однако, следует напомнить, что индукционные металлодетекторы обычно содержат по меньшей мере одну передающую катушку, установленную на одной стороне прохода 102, и по меньшей мере одну приемную катушку, установленную на противоположной стороне прохода 102. В передающую катушку подают переменный электрический ток контролируемой частоты, предпочтительно, ток в интервале заданных и контролируемых частот, с целью формирования магнитного поля обычно в диапазоне от 100 Гц до 50 кГц. Приемная катушка предназначена для обнаружения возмущения указанного магнитного поля, вызванного присутствием металлического предмета в проходе 102, и перемещением металлического предмета в проходе 102, например, ослабления амплитуды магнитного поля или изменения фазы сигнала, вызванного, например, вихревыми токами, создаваемыми в металлическом предмете.
На практике каждая из катушек - предающая и приемная - выполнена из множества элементарных катушек или витков, охватывающих соответствующую часть высоты проходного детектора, чтобы дать возможность распознавать положение обнаруженных металлических предметов, и таким образом, определять высоту расположения таких подозрительных предметов.
Кроме того, предпочтительно чередовать функции катушек, делая их поочередно передающей и приемной.
Предпочтительно, в боковых панелях 110, 120 также размещены средства 130, формирующие барьеры обнаружения движения через проход, распределенные в продольном направлении по пути движения человека по проходу 102.
Таким образом, на фиг.2a-2d и 2f условно показаны три барьера 131, 132 и 133, которые последовательно пересекает любой человек, входящий в систему, соответствующую настоящему изобретению.
На практике в изобретении может быть использована любая технология для создания средств 130, формирующих указанные барьеры.
К примеру, который не носит ограничительного характера, средствами 130 могли бы служить оптические барьеры, выполненные на основе пар: передатчик/приемник, расположенных соответственно на двух боковых панелях 110, 120. Оптический сигнал передается от передатчика, расположенного на одной стороне прохода 102, к приемнику, расположенному на противоположной стороне прохода 102, пока никто не находится на пути оптического сигнала. С другой стороны, оптический сигнал прерывается, когда человек, идущий через проход, пересекает указанный световой пучок.
Барьеры 130 обнаружения движения через проход могут быть выполнены по любой технологии, иной нежели оптическая.
Обнаружение продвижения человека по проходу 102 и его положения в проходе 102 может быть выполнено с использованием по меньшей мере одной правильно установленной камеры, которая позволяет выполнять обнаружение последовательного движения человека, например, путем анализа пикселей, посредством множества условных барьеров, соответствующих расположению оптических барьеров 131, 132 и 133, о которых шла речь выше.
Аналогично, металлодетектор 100, который в соответствии с настоящим изобретением связан со сканером 10 всего тела, может быть оснащен допплеровской системой или аналогичной, которая позволяет определять место и движение человека в проходе 102.
Фиг. 2a-2f, которые схематически представляют горизонтальную проекцию с разрезом системы, соответствующей настоящему изобретению, иллюстрируют шесть вариантов, которые не носят ограничительного характера.
На фиг.2a-2f в первую очередь можно отметить наличие символов 20, 22 на полу практически в середине пространства, образующего сканер 10 всего тела. Символы 20, 22 предпочтительно соответствуют контуру подошв обуви. Указанные символы 20, 22 указывают место для стоп человека во время его обследования посредством сканера 10 всего тела. Символы 20, 22 позволяют гарантировать точное расположение обследуемого человека относительно микроволновых передающих/приемных средств 12 и микроволновых приемных/передающих средств 14, которые расположены напротив друг друга соответственно на каждой стороне образованного таким образом прохода в сканере 10 всего тела, который служит продолжением прохода 102 металлодетектора 100.
Хотя на фиг.2a-2f это и не показано, в металлодетекторе 100 также может быть на полу нанесена центральная линия или эквивалентный знак, определяющий предпочтительный путь следования человека во время его движения в металлодетекторе 100, чтобы гарантировать точное расположение человека относительно боковых панелей 110, 120, и, следовательно, относительно средств обнаружения.
Сканер 10 всего тела может представлять собой сканер проходного типа. В этом случае, после исследования в сканере 10 всего тела, досматриваемый человек выходит из сканера 10 с той стороны, которая противоположна металлодетектору 100.
Сканер 10 всего тела может также быть закрытым с той стороны, которая противоположна металлодетектору 100. В этом случае, после исследования в сканере 10 всего тела, досматриваемый человек выходит из сканера 10, снова проходя через металлодетектор 100.
Как отмечалось выше, средства индукционного типа для обнаружения металла, расположенные в боковых панелях 110, 120, металлодетектора 100, в предпочтительном случае выполняют в виде катушек.
Фиг. 2а таким образом представляет первый вариант, согласно которому указанные средства 140 составлены из двух преобразователей 141, 142, выполненных в виде катушек, намотанных на соответствующих опорах - сердечниках.
Такие средства 140 позволяют обнаруживать присутствие металлических предметов на человеке, проходящем через металлодетектор 100. Однако, они не позволяют точно определять положение металлических предметов на человеке в горизонтальной плоскости. Другими словами, такие средства не позволяют точно указать, где находится обнаруженный металлический предмет - скорее на передней стороне или на задней стороне человека, или скорее на левой стороне или на правой стороне.
Диаметр (ширина) D каждого сердечника преобразователей 141 и 142, представленных на фиг.2а, предпочтительно составляет от 140 мм до 300 мм, в то время как поперечное расстояние W между указанными сердечниками двух данных преобразователей 141 и 142 предпочтительно составляет от 680 мм до 820 мм.
Фиг. 2b представляет аналогичную конструкцию, содержащую преобразователь 141, 142 соответственно с каждой стороны металлодетектора в одной из боковых панелей 110, 120. Однако, согласно фиг.2b, преобразователь 141, 142 выполнен не в виде катушки, намотанной на сердечнике, а в виде катушки, намотанной на панели, вытянутой продольно в направлении движения человека в металлодетекторе.
Ширина D каждой панели преобразователей 141 и 142, представленных на фиг.2b, предпочтительно составляет от 140 мм до 600 мм, в то время как поперечное расстояние W между панелями двух данных преобразователей 141 и 142 предпочтительно составляет от 680 мм до 820 мм.
Фиг. 2 с вариант, согласно которому средства 140 содержат по меньшей мере три катушки-преобразователя, распределенные между боковыми панелями 110, 120, так что по меньшей мере одна катушка установлена в одной боковой панели и две катушки - в противоположной боковой панели.
Указанные две катушки, расположенные в общей боковой панели 110 или 120, дополнительно разнесены в продольном направлении.
Специалистам в данной области должно быть понятно, что конструкция с двумя преобразователями, представленная на фиг.2а, 2b, позволяет осуществлять одномерное (1D) обнаружение металла и определение его положения по одному направлению (по высоте путем расщепления приемной катушки по высоте).
Конструкция, изображенная на фиг.2 с, со своей стороны позволяет обнаруживать металл и определять положение металла по трем направлениям. Такое определение положения по трем направлениям становится возможным благодаря тому факту, что человек последовательно пересекает несколько особых линий обнаружения, которые соответствуют условным линиям, соединяющим центры передающих и приемных катушек. Таким образом, если произвольно принять, что катушка 142, расположенная на одной стороне детектора 100, является передатчиком, в то время как две катушки 141 и 144, расположенные на противоположной стороне детектора 100, являются приемниками, то человек, который входит в детектор 100, последовательно пересекает первую особую линию, которая соединяет преобразователи 142 и 141, а затем вторую особую линию, которая соединяет преобразователи 142 и 144.
Точнее, на фиг.2 с сплошными линиями представлена конфигурация с тремя преобразователями: с двумя преобразователями 141 и 144 на боковой панели 110 и с преобразователем 142 на противоположной панели 120.
На фиг.2 с штриховой линией показан четвертый преобразователь 143 на панели 120, общей с преобразователем 142. Преобразователь 143 смещен в продольном направлении относительно преобразователя 142. Преобразователи 142 и 143 расположены так, что они соответственно обращены в сторону преобразователей 141 и 143.
Таким образом, фиг.2 с соответствует конфигурации с двумя преобразователями 141, 144 на первой боковой панели 110 и двумя преобразователями 142, 143 на второй боковой панели 120. Специалистам в данной области должно быть понятно, что конфигурация с четырьмя преобразователями 141, 142, 143 и 144, изображенная на фиг.2 с, позволяет улучшить разрешение и надежность определения положения металлических предметов по трем направлениям, что определяется путем добавления дополнительных особых линий обнаружения, соответствующих линиям, соединяющим два противостоящих преобразователя (142 и 141, 142 и 144, 143 и 141, 143 и 144) и возможностью каждую катушку вынуждать поочередно работать в качестве передатчика и приемника.
Ширина (диаметр) D каждого сердечника преобразователей 141, 142, 143 и 144, представленных на фиг.2 с, предпочтительно составляет от 140 мм до 300 мм, интервал L между двумя соседними сердечниками 141 и 144 или 142 и 143 предпочтительно в 1,5-3 раза больше ширины D, а именно составляет от 210 мм до 900 мм, и, следовательно, межцентровое расстояние для пар преобразователей составляет от 350 мм до 1200 мм, в то время как поперечное расстояние W между сердечниками указанных двух преобразователей 141 и 142 предпочтительно составляет от 680 мм до 820 мм.
Таким образом, угол между линией обнаружения, соединяющей преобразователи 141 и 142 с одной стороны и линией, соединяющей преобразователи 144 и 142 с другой стороны, составляет от 15° до 60°, или типично от 30° до 45°. Аналогично, угол между линией обнаружения, соединяющей преобразователи 141 и 143 с одной стороны и линией, соединяющей преобразователи 144 и 143 с другой стороны, или преобразователи 142 и 141 с одной стороны и 143 и 141 с другой стороны, или преобразователи 142 и 144 с одной стороны и 143 и 144 с другой стороны, составляет от 15° до 60°, или типично от 30° до 45°.
Указанный угол важен, в частности, для того, чтобы дать возможность определять положение металлических искомых предметов по ширине тела досматриваемого человека, т.е. определять, где находится искомый предмет - на левой или на правой стороне человека. Если определить линии обнаружения наклонные относительно направления движения человека, то указанный угол задает линии обнаружения (142/144, 143/141, 144/142, 141/143), которые пересекают одну сторону человека вначале или в конце
Определение положения металлического искомого предмета в пределах между передней стороной человека и его задней стороной выполняется, когда человек пересекает поперечные линии обнаружения (141/142, 143/144, 142/141, 144/143).
Естественно, средства 50 анализа используют все данные, получаемые приемными преобразователями 141, 142, 143 и 144, чтобы конкретно определять положение металлических искомых предметов: левое/правое, переднее/заднее. В самом деле, обнаруживаемые металлические предметы находятся они слева или справа от человека, на стороне груди или на стороне спины, оказывают влияние при пересечении линии обнаружения, поперечной или наклонной.
Фиг. 2d представляет вариант подобный фиг.2с, при этом преобразователи 141, 144 и 142, 143 на сердечниках фиг.2 с заменены на фиг.2d преобразователями панельного типа.
Величины ширины D преобразователей 141, 142, 143 и 144, промежутка L между преобразователями, межцентрового расстояния преобразователей, поперечного расстояния W между преобразователями и угла между полученными таким образом поперечными и наклонными линиями обнаружения, показанными на фиг.2с, остаются применимыми и к фиг.2d.
Фиг. 2е представляет другой вариант, в соответствии с которым индукционные средства 140 обнаружения металла совмещены с микроволновыми средствами 12, 14 обнаружения.
Другими словами, в соответствии с вариантом осуществления фиг.2е, индукционные средства 140 обнаружения и микроволновые средства 12, 14 обнаружения совмещены в общих боковых панелях, которые окружают сканер 10 всего тела.
Точнее, в боковой панели 110 на фиг.2е можно видеть преобразователь 141 индукционного типа и микроволновую передающую/приемную антенну 12, в то время как в противоположной панели 120 можно видеть преобразователь 142 индукционного типа и микроволновую передающую/приемную антенну 14.
Ширина D преобразователей 141 и 142, которая соответствует глубине сканера всего тела, составляет от 920 мм до 1400 мм, предпочтительно от 1000 мм до 1400 мм, в то время как поперечное расстояние между двумя антеннами 12 и 14 предпочтительно составляет от 780 мм до 1000 мм
Фиг 2f представляет еще один вариант сканера всего тела, соответствующий фиг.2е, согласно которой индукционные средства 140 обнаружения металла совмещены с микроволновыми средствами 12, 14 обнаружения. Указанные индукционные средства обнаружения металла, совмещенные с микроволновыми средствами обнаружения, на фиг.2f отмечены индексом "bis". Однако, в соответствии с фиг.2f, устройство, кроме того, содержит перед сканером 10 всего тела дополнительный металлодетектор 100. В соответствии с вариантом осуществления, представленным на фиг.2f, указанный предварительный металлодетектор 100 образован двумя преобразователями 141 и 142 в соответствии с фиги. 2а. Как вариант, данный предварительный металлодетектор 100 мог бы соответствовать фиг.2b, которая относится к детекторам, выполненным на катушках панельного типа, или, если это целесообразно, то к одному из вариантов, которые показаны на фиг.2 с или 2d.
Величины ширины D преобразователей 141, 142, 143 и 144, промежутка L между преобразователями, межцентрового расстояния преобразователей, поперечного расстояния W между преобразователями и угла между полученными таким образом поперечными и наклонными линиями обнаружения, показанными на фиг.2а-2е, остаются применимыми и к фиг.2f.
Следует напомнить, что в рамках настоящего изобретения каждое из передающих и/или приемных средств может поочередно работать в обратном режиме, т.е. в режиме приема и/или передачи.
На фиг.3-8 представлены различные блок-схемы алгоритмов осуществления способа обнаружения, соответствующего настоящему изобретению.
Далее будет рассмотрен вариант осуществления, иллюстрированный на фиг. 3.
Фиг. 3 изображает блок-схему алгоритма, который содержит следующие последовательные этапы:
- этап 300: начало досмотра человека. На этой стадии человека, подлежащего досмотру, приглашают зайти в соответствующий изобретению сканер всего тела, проходя через металлодетектор 100;
- этап 310: начало прохождения человека через магнитное поле, создаваемое металлодетектором 100, точнее катушками 140. На данном этапе досматриваемый человек проходит/останавливается, пересекает зону контроля индукционных средств обнаружения (следует напомнить, что зона контроля индукционных средств обнаружения может находиться до сканера 10 всего тела, строго говоря, как показано на фиг.1 и фиг.2a-2d, или может охватывать область сканера 10 всего тела, как показано на фиг.2е и 2f);
- этап 311: получение сигнала, соответствующего индукционному полю;
- этап 320: анализ сигналов, поступающих от металлодетектора 100, при помощи средств 50 анализа, и определение того, произошло обнаружение искомого металла или нет;
- этап 330, выполняемый в случае отрицательного ответа при выполнении этапа 320: средства 50 анализа системы устанавливают чувствительность средств 10 обнаружения, основанных на микроволновой визуализации, на низкий уровень для диэлектриков (англ. "dielectric"). Изменение чувствительности средств 10 обнаружения, основанных на микроволновой визуализации, выполняется путем изменения средствами 50 анализа параметров обработки микроволнового изображения с целью определения того, должны ли средства 50 анализа, исходя из сигналов, сформированных металлодетектором 100, послать в соответствующее предупреждающее устройство инструкции для формирования тревожного сигнала (звукового и/или оптического). В данном случае, поскольку металлодетектор 100 не обнаружил металлического предмета, средства 50 анализа изменяют параметры обработки микроволнового изображения, так чтобы выполнять анализ на сканере 10 всего тела, исходя из чувствительности средств обнаружения, основанных на микроволновой визуализации, которая соответствует уровню лишь необходимому для обнаружения диэлектрических искомых объектов, т.е. чувствительности ниже той, которая требовалась оператору для обнаружения металлических предметов. Эта мера предосторожности позволяет снизить риск получения ложных тревожных сигналов.
- этап 340: выполняемый в случае положительного ответа на этапе 320: средства 50 анализа системы устанавливают чувствительность средств 10 обнаружения, основанных на микроволновой визуализации, в этом случае на более высокий уровень для металлов и диэлектриков (англ. "metal & dielectric"). Здесь снова изменение чувствительности средств 10 обнаружения, основанных на микроволновой визуализации, выполняется путем изменения средствами 50 анализа параметров обработки микроволнового изображения. В частности, данное изменение чувствительности позволяет обнаруживать металлические объекты и диэлектрические объекты. Хотя данная мера является более радикальной и видимо создаст более высокий уровень ложных тревожных сигналов, она требуется в силу того факта, что металлодетектор 100 уже обнаружил потенциальное присутствие металла перед входом в сканер (это случается только в 10% случаев, и хотя в сущности вызывает опасность более высокой частоты появления ложных тревожных сигналов, но в итоге не создает значительного риска учащения появления ложных тревожных сигналов);
- этап 342: получение сигнала от средств 10 обнаружения, основанных на микроволновой визуализации. На данном этапе осуществляется сканирование досматриваемого человека микроволновыми средствами 10. Значимые данные, поступающие от средств обнаружения, собирают и анализируют, чтобы сформировать микроволновое изображение.
- этап 360: на данном этапе средства 50 анализа выполняют анализ сигналов, поступающих от средств 10 обнаружения, основанных на микроволновой визуализации, и определяют, соответствуют ли сигналы факту нахождения объекта. С этой целью средства 50 анализа выполняют обработку микроволнового изображения с учетом чувствительности средств обнаружения, основанных на микроволновой визуализации, которая была определена на этапе 330 или этапе 340 в зависимости от реакции на этапе 320.
Следует понимать, что, согласно одному варианту, этап 340 изменения чувствительности можно в качестве варианта выполнять одновременно с этапом 342 получения сигнала, или после этапа 342 получения сигнала, при этом изменение чувствительности соответствует изменению параметров обработки микроволнового изображения.
- Этап 380, выполняемый в случае положительного ответа на этапе 360: индикация тревоги (подача звукового и/или светового тревожного сигнала), и показ положения подозрительных объектов на микроволновом изображении, сформированном средствами 50 анализа. Картина тревоги делается доступной для оператора, обычно на экране с показом положения подозрительных объектов, обнаруженных на микроволновом изображении. Следует заметить, что этап 360 исключается, если на этапе 360 обнаружения подозрительных объектов не происходит;
- этап 390: завершение досмотра человека.
Согласно одному варианту осуществления, на этапе 340 средства 50 анализа могут быть настроены так, чтобы изменять чувствительность средств обнаружения, основанных на микроволновой визуализации, только в области микроволнового изображения, в которой металлодетектор 100 обнаружил металлический предмет, при этом в остальных областях микроволнового изображения чувствительность остается неизменной. Другими словами, средства 50 анализа изменяют указанную чувствительность только на участке микроволнового изображения, которое получено из сигналов, поступающих от микроволновых средств 10 обнаружения, причем указанный участок соответствует области, в которой металлодетектор обнаружил металлический объект.
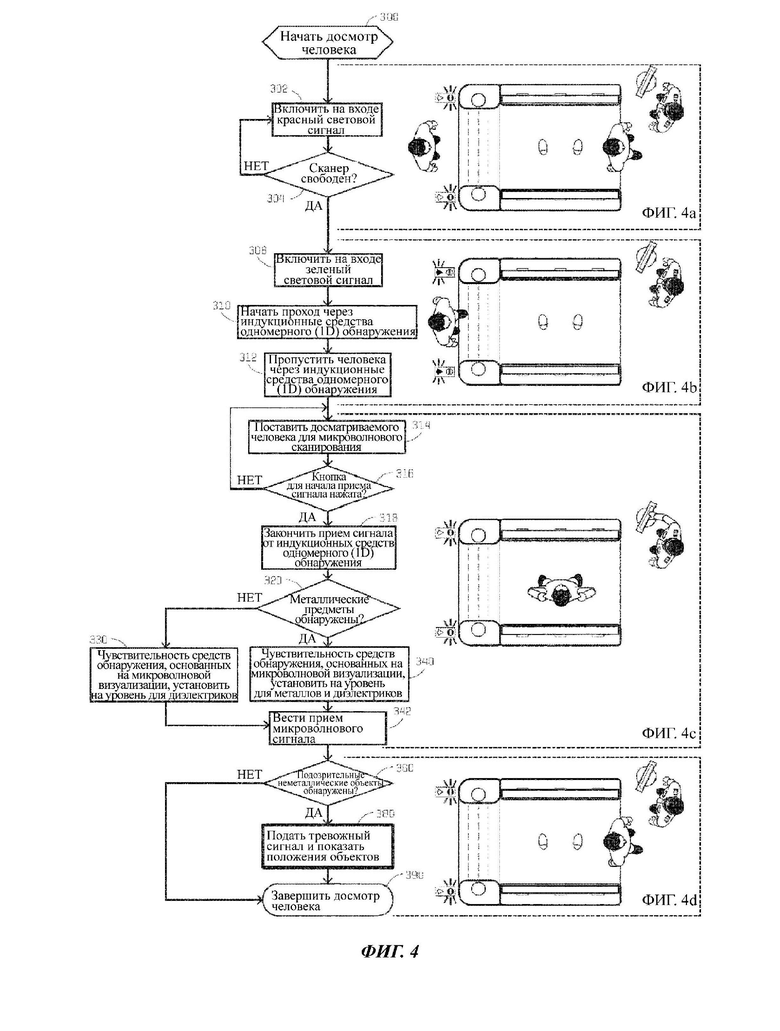
Блок-схема, представленная на фиг.4, соответствует варианту осуществления способа, соответствующего изобретению, в случае выявления металлических предметов посредством индукционных средств одномерного (1D) обнаружения с использованием устройства, изображенного на фиг.2а.
На фиг.4 показаны этапы: 300 - начало досмотра; 312 - прохождение через магнитное поле, 320 - обнаружение металлических предметов; 330 -установка чувствительности сканера 10 всего тела на низкий уровень для диэлектриков ("dielectric") в случае, если перед этим не были обнаружены металлические объекты; 340 - установка чувствительности сканера 10 всего тела наоборот на более высокий уровень для металлов и диэлектриков ("metal & dielectric") в случае, если перед этим были обнаружены металлические объекты; 342 - получение сигнала микроволнового обнаружения; 360 - проверка факта обнаружения неметаллического объекта; 380 - подача тревожного сигнала и показ положения подозрительных объектов на микроволновом изображении, сформированном средствами 50 анализа; и 390 - завершение досмотра, что было ранее рассмотрено согласно фиг.3.
Однако, следует отметить, что на фиг.4 представлен этап получения сигнала индукционных средств одномерного (1D) обнаружения, который расширен по сравнению с этапом 311 на фиг.3. Действительно, согласно фиг.4 указанная процедура получения сигнала индукционных средств одномерного (1D) обнаружения составлена из последовательности следующих этапов:
- этап 310: начало получения сигнала индукционных средств одномерного (1D) обнаружения перед этапом 312 прохода, а затем подготовкой к вводу в работу сканера всего тела, в виде следующих этапов:
- этап 314: постановка досматриваемого человека для исследования путем сканирования микроволновым полем;
- этап 316: подтверждение готовности сканера всего тела к работе, например, путем нажатия кнопки подтверждения уполномоченным оператором, как показано на фиг.4 с, или автоматически датчиком положения досматриваемого человека, затем
- этап 318: окончание получения сигнала индукционных средств одномерного (1D) обнаружения.
Более того, между этапом 300 начала досмотра и этапом 310 начала получения сигнала индукционных средств одномерного (1D) обнаружения, изображенная на фиг.4 блок-схема содержит следующие этапы:
- этап 302: изначальное включение визуального сигнала, который предписывает человеку, подлежащему досмотру, подождать, прежде чем входить в металлодетектор 100, например, в виде красного светового сигнала;
- этап 304: определение присутствия или отсутствия в досмотровом устройстве предыдущего досматриваемого человека. В случае выявления человека в устройстве, которое тем самым не свободно, этап 304 зацикливается назад на этап 302 ожидания. Напротив, если в устройстве никто не обнаружен, т.е. устройство свободно, этап 304 переходит к этапу 308.
Этапы 302 и 304 схематически показаны на фиг.4а.
- этап 308: включение визуального сигнала, который приглашает человека войти в металлодетектор 100, например, в виде зеленого светового сигнала.
Этапы 308-312 схематически показаны на фиг.4b.
Этапы 314-342 схематически показаны на фиг.4с. Следует отметить, что стопы досматриваемого человека находятся на символах 20, 22, которые нанесены на пол.
Этапы 360-390 схематически показаны на фиг.4d.
Блок-схема работы устройства, соответствующего фиг.2b, содержащая обнаружение металлических предметов посредством индукционных средств одномерного (1D) обнаружения, в которых используются панели, может быть подобна блок-схеме, изображенной на фиг.4.
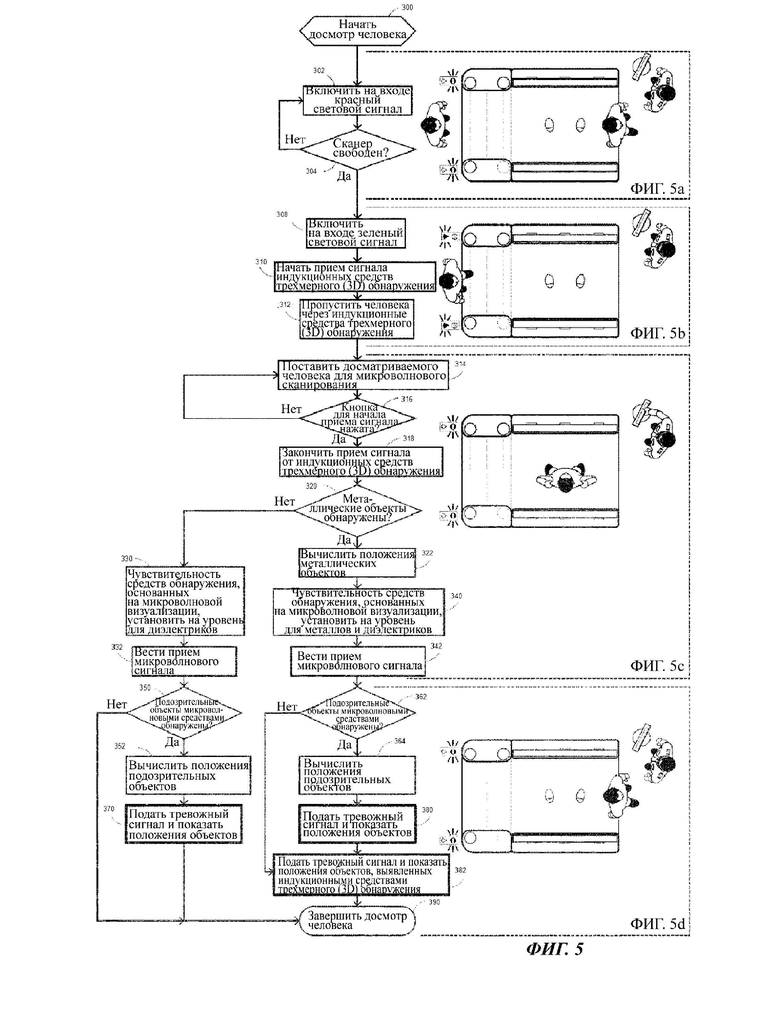
Блок-схема, представленная на фиг.5, соответствует варианту осуществления способа, соответствующего изобретению, в случае выявления металлических предметов посредством индукционных средств трехмерного (3D) обнаружения с использованием устройства, изображенного на фиг.2с.
На фиг.5 изображены этапы 300, 302, 304, 308, 310 (здесь начало приема сигнала от индукционных средств трехмерного (3D) обнаружения), 312, 314, 316, 318 (здесь окончание приема сигнала от индукционных средств трехмерного (3D) обнаружения), 320 (здесь анализ сигналов, поступающих от металлодетектора 100, в котором используются индукционные средства трехмерного (3D) обнаружения, для определения того, был обнаружен искомый металл или нет, и для определения местоположения металла в 3D), 330, 340, 342 получения сигнала от микроволновых средств обнаружения, 380 и 390, которые были описаны ранее согласно фиг.4. Повторного описания указанных этапов приведено не будет.
Однако, следует заметить, что после этапа 330, в случае необнаружения металлических объектов металлодетектором 100 на этапе 320, фиг.5 представляет ряд более подробных операций, прежде чем соединиться с финальным этапом 390 завершения досмотра:
- этап 332 получение сигнала, поступающего от микроволновых средств обнаружения;
- этап 350 проверки факта обнаружения подозрительного объекта микроволновыми средствами, и переход к этапу 390 завершения досмотра, если на этапе 350 подозрительные объекты не обнаружены;
- этап 352, выполняемый в случае обнаружения подозрительного объекта микроволновыми средствами на этапе 350, состоящий из вычисления положения каждого объекта, обнаруженного микроволновыми средствами, и
- этап 370 аналогичный этапу 380 подачи тревожного сигнала и показа положения подозрительных объектов на микроволновом изображении.
Следует также заметить, что фиг.5 между этапами 320 и 340 представляет промежуточный этап 322 вычисления положения каждого металлического предмета, обнаруженного индукционными средствами трехмерного (3D) обнаружения. Точнее, в случае обнаружения металлического предмета металлодетектором 100 на этапе 320, способ на промежуточном этапе 322 определяет на основе трехмерных данных положение каждого металлического предмета (средства для получения сигнала от индукционных средств в данном случае обслуживают три измерения). На этапе 340 чувствительность средств обнаружения, основанных на микроволновой визуализации, может быть установлена уровень для металлов и диэлектриков ("metal & dielectric") либо для всего микроволнового изображения, либо только для области (областей), в которых металлодетектор 100 обнаружил металлический объект (объекты). Затем может быть выполнен этап 342 получения микроволнового сигнала.
Как говорилось выше, этап 340 изменения чувствительности как вариант может выполняться одновременно с этапом 342 получения сигнала или после этапа 342, причем изменение чувствительности соответствует изменению параметров обработки микроволнового изображения.
Блок-схема фиг.5 также содержит вместо этапа 360 фиг.4 этап 362 проверки факта обнаружения подозрительных объектов микроволновыми средствами аналогичный этапу 350, за которым в случае положительного ответа (т.е. в случае обнаружения подозрительного объекта на шаге 362) следует этап 364 аналогичный этапу 352, содержащий вычисление положения каждого объекта, обнаруженного микроволновыми средствами, за которым следует этап 380 подачи тревожного сигнала и показа положения объектов, обнаруженных микроволновыми средствами, на микроволновом изображении, сформированном средствами 50 анализа.
Блок-схема фиг.5 дополнительно содержит, между этапами 380 и 390, этап 382 подачи тревожного сигнала и трехмерного (3D) показа положения металлических объектов, выявленных индукционными средствами трехмерного (3D) обнаружения.
Этап 362 переходит к тому же этапу 382, если на этапе 362 не происходит обнаружения объектов микроволновыми средствами.
Этапы 302 и 304 схематически показаны на фиг.5а.
Этапы 308-312 схематически показаны на фиг.5b.
Этапы 314-342 схематически показаны на фиг.5с. Этапы 362-390 схематически показаны на фиг.5d.
Блок-схема работы устройства, соответствующего фиг.2d, содержащая обнаружение металлических предметов посредством индукционных средств трехмерного (3D) обнаружения, в которых используются панели, может быть подобна блок-схеме, изображенной на фиг.5.
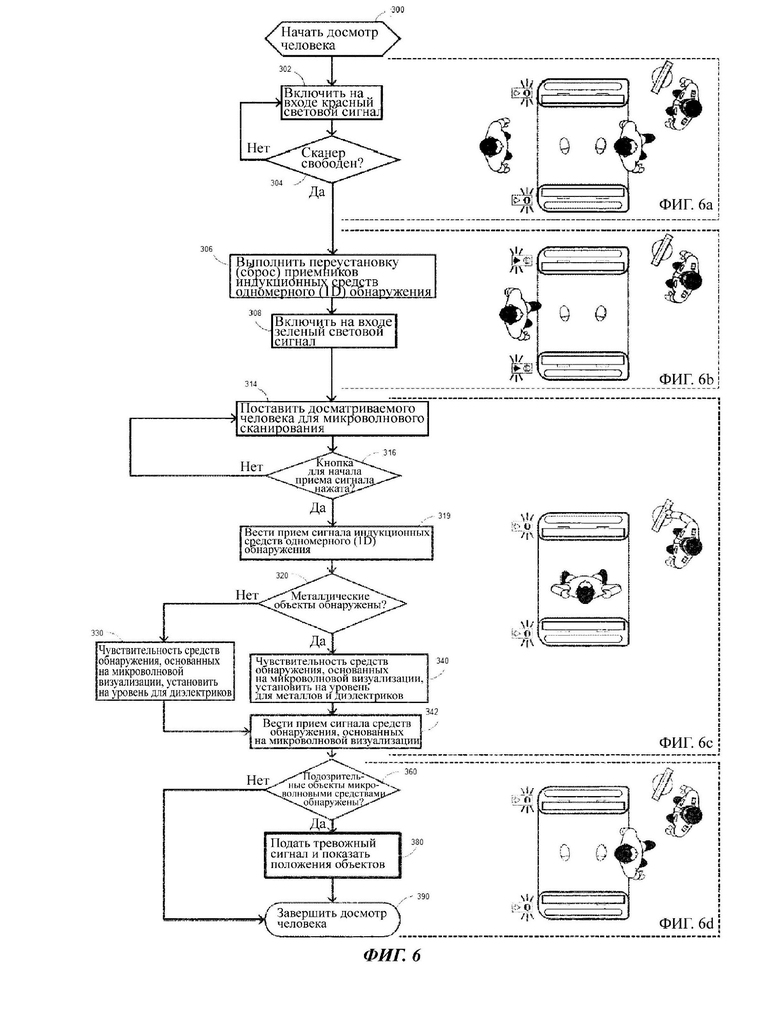
Блок-схема, представленная на фиг.6, соответствует варианту осуществления способа, соответствующего изобретению, в случае выявления металлических предметов посредством индукционных средств одномерного (1D) обнаружения с использованием устройства, изображенного на фиг.2е, содержащего совмещенные: микроволновые средства обнаружения и индукционные средства одномерного (1D) обнаружения.
На фиг.6 изображены этапы 300, 302, 304, 308, 324, 316, 320 (здесь анализ сигналов, поступающих от металлодетектора 100, в котором используются индукционные средства одномерного (1D) обнаружения, для выяснения, произошло или нет обнаружение металла), 330, 340, 342, 360 (здесь обнаружение объекта микроволновыми средствами обнаружения), и этапы 380 и 390, которые были рассмотрены выше. Указанные этапы повторно рассматриваться далее не будут.
Однако, следует заметить, что между этапом 304 проверки готовности устройства к работе и этапом 308 разрешения войти в устройство фиг.6 содержит этап 306 переустановки (сброса) приемников индукционных средств одномерного (1D) обнаружения, а между этапами 316 и 320 - содержит этап 319 приема сигнала, поступающего от индукционных средств одномерного (1D) обнаружения.
Этапы 302 и 304 схематически показаны на фиг.6а.
Этапы 306 и 308 схематически показаны на фиг.6b.
Этапы 314-342 схематически показаны на фиг.6с.
Этапы 360-390 схематически показаны на фиг.6d.
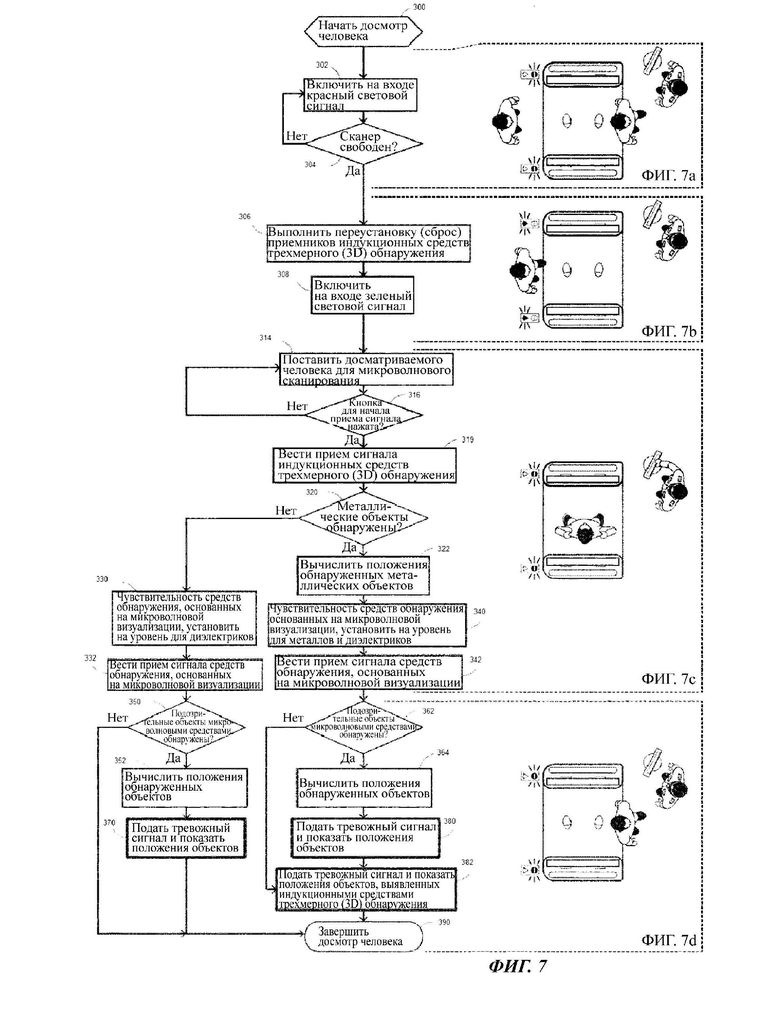
Блок-схема, представленная на фиг.7, соответствует варианту осуществления способа, соответствующего изобретению, в случае выявления металлических предметов посредством индукционных средств трехмерного (3D) обнаружения с использованием устройства, изображенного на фиг.2е, содержащего совмещенные: микроволновые средства обнаружения и индукционные средства трехмерного (3D) обнаружения.
На фиг.7 изображены ранее рассмотренные этапы 300, 302, 304, 306, 308, 314, 316, 319, 320, 330, 332, 350, 352, 370, 322, 340, 342, 362, 364, 380, 382 и 390 (при этом этапы 306, 319 и 320 здесь относятся к индукционным средствам трехмерного (3D) обнаружения). Указанные этапы далее повторно рассматриваться не будут.
Этапы 302 и 304 схематически показаны на фиг.7а.
Этапы 306 и 308 схематически показаны на фиг.7b.
Этапы 314-342 схематически показаны на фиг.7с.
Этапы 362-390 схематически показаны на фиг.7d.
Блок-схема, представленная на фиг.8, соответствует варианту осуществления способа, соответствующего изобретению, с использованием устройства, изображенного на фиг.2f, содержащего совмещенные микроволновые средства обнаружения и индукционные средства трехмерного (3D) обнаружения, перед которыми предусмотрены индукционные средства одномерного (1D) обнаружения.
На фиг.8 изображены ранее рассмотренные этапы 300, 302, 304, 306, 308, 310, 312, 314, 316, 318, 320, 330, 332, 350, 352, 370, 322, 340, 342, 362, 264, 380, 382 и 390 (при этом этапы 310, 312, 318, 320 здесь относятся к индукционным средства одномерного (1D) обнаружения, в то время как этап 322 относится к индукционным средствам трехмерного (3D) обнаружения). Указанные этапы далее повторно рассматриваться не будут.
Следует заметить, что на фиг.8 между этапами 320 и 322 представлен этап 321 приема сигнала, поступающего от индукционных средств трехмерного (3D) обнаружения.
Этапы 302 и 304 схематически показаны на фиг.8а.
Этапы 306 и 308 схематически показаны на фиг.8b.
Этапы 310-342 схематически показаны на фиг.8с.
Этапы 362-390 схематически показаны на фиг.8d.
Специалистам в данной области должно быть понятно, что использование в средствах обнаружения, основанных на микроволновой визуализации, в сканере 10 всего тела уровня чувствительности достаточного для обнаружения и металлических и диэлектрических объектов реализуется только, когда металлодетектор 100 перед этим уже обнаружил возможное присутствие металлического объекта, что имеет место в лучшем случае лишь в 10% досмотров, позволяет значительно снизить риск ложных тревожных сигналов в сканере всего тела.
В самом деле, использование в сканере всего тела в 90% случаев уровня чувствительности, подходящего для диэлектриков ("dielectric"), т.е. более низкой чувствительности, позволяет значительно уменьшить риск подачи ложных тревожных сигналов.
Различия между блок-схемами, представленными на фиг.4, 5, 6, 7 и 8, соответствуют только вариантам реализуемых режимов.
Режимы осуществления способа, соответствующего настоящему изобретению, схематически представленные блок-схемами фиг.3-8, могут быть предметом многочисленных других вариантов осуществления. В частности, порядок выполнения различных этапов может быть предметом создания различных вариантов, при этом некоторые этапы по меньшей мере из тех, что показаны на фиг.3-8, могут быть опущены, переставлены, выполнены параллельно или дополнены.
Вариант осуществления, представленный на фиг.2f, в соответствии с которым средства 140 обнаружения металла, которые позволяют реализовать трехмерное (3D) обнаружение, совмещены со сканером всего тела, но при этом также предусмотрены дополнительные средства 100 одномерного (1D) обнаружения металла, установленные перед сканером 10 всего тела, имеет то преимущество, что при таком построении есть возможность использовать предварительный индукционный металлодетектор одномерного (1D) обнаружения, оптимизированный для распознавания присутствия или отсутствия металлических объектов, и соответствующего управления чувствительностью сканера 10 всего тела, чтобы свести к минимуму число появления ложных тревожных сигналов, и индукционный металлодетектор трехмерного (3D) обнаружения, совмещенный со сканером 10 всего тела, оптимизированный для определения положения металлических объектов, и таким образом обеспечения максимальной точности определения положения металлических объектов. Другими словами, согласно варианту осуществления, индукционные средства 141, 142 одномерного (1D) обнаружения используются, для определения того, должен ли быть обнаружен металлический объект, в то время как индукционные средства 141bis, 142bis трехмерного(3D) обнаружения (которые необязательно являются совмещенными) могут быть использованы для точного определения местонахождения металлического (объектов) в пространстве трех измерений. Таким образом, индукционные средства одномерного (1D) обнаружения и трехмерного (3D) обнаружения могут быть специализированы для выполнения обнаружения без определения местонахождения (случай средств 141, 142 одномерного обнаружения) или с определением местонахождения (случай средств 141bis, 142bis трехмерного обнаружения).
Как говорилось выше, в границах идеи настоящего изобретения, предпочтительно, чтобы результат анализа с использованием индукционных средств, цель которого поиск металлических объектов, и результат анализа с использованием средств, основанных на микроволновой визуализации, отображались на одном экране, доступном для оператора.
Согласно одному конкретному варианту осуществления, соответствующему настоящему изобретению, в случае, если индукционные средства обнаруживают один или несколько объектов, чувствительность системы 10 микроволновой визуализации предустанавливают на уровень для металлов и диэлектриков (metal & dielectric") только для тех областей, где индукционная система 100 выявила присутствие металлического (объектов), в то время как для остальных областей чувствительность системы 10 микроволновой визуализации предустанавливают на уровень для диэлектриков ("dielectric"). Для этого, как было рассмотрено выше, средства 50 анализа построены так, чтобы не изменять параметры обработки микроволнового изображения только в тех областях, в которых металлодетектор 100 обнаружил металлический объект. Для сравнения, чувствительность системы 10 микроволновой визуализации остается неизменной в остальных областях микроволнового изображения, чтобы ограничить частоту поступления ложных тревожных сигналов. Таким образом, средства 50 анализа изменяют указанную чувствительность только в части микроволнового изображения, которая получена из сигналов, поступающих от средств 10 обнаружения, основанных на микроволновой визуализации, причем указанная часть соответствует области, в которой металлодетектор обнаружил металлический объект.
В случае использования индукционной системы одномерного (1D) обнаружения, области, в которых производится изменение чувствительности системы микроволновой визуализации, определяются только по высоте, в то время как в случае использования индукционной системы трехмерного (3D) обнаружения указанные области могут быть определены по высоте, ширине (вправо/влево) и глубине (вперед/назад).
Устройство подачи тревожного сигнала может, в частности, содержать по меньшей мере одно из следующих устройств: громкоговоритель, адаптированный для формирования звукового тревожного сигнала, светильник, адаптированный для формирования светового тревожного сигнала (например, светодиод), который как вариант может быть цветным, экран, адаптированный для отображения тревожных сообщений, где требуется поверх микроволнового изображения, сформированного средствами 50 анализа.
Естественно, настоящее изобретение не ограничивается конкретными вариантами осуществления, которые были описаны выше, но распространяется на любые варианты в соответствии с сущностью изобретения.






Использование: для обнаружения запрещенных объектов. Сущность изобретения заключается в том, что система обнаружения содержит индукционные средства обнаружения, микроволновые средства обнаружения и средства анализа, выполненные с возможностью анализа сигналов, поступающих от индукционных средств обнаружения, и для определения по указанным сигналам потенциального присутствия металлических объектов, а также средства, предназначенные для соответствующего изменения, по меньшей мере в интересующей области, чувствительности средств обнаружения, основанных на микроволновой визуализации. Технический результат: обеспечение возможности оптимизации характеристик распознавания. 2 н. и 15 з.п. ф-лы, 13 ил.
1. Система обнаружения запрещенных объектов, содержащая:
- индукционные средства (140) обнаружения,
- средства (10) обнаружения, основанные на микроволновой визуализации, выполненные с возможностью формирования микроволнового изображения,
- средства (50) анализа, выполненные с возможностью анализа сигналов, поступающих от индукционных средств (140) обнаружения, и определения по указанным сигналам потенциального присутствия металлических объектов,
при этом, в случае выявления потенциального присутствия по меньшей мере одного металлического объекта индукционными средствами (140) обнаружения, средства (50) анализа также выполнены с возможностью определения местонахождения указанного по меньшей мере одного металлического объекта и соответствующей настройки чувствительности средств (10) обнаружения, основанных на микроволновой визуализации, так чтобы указанная чувствительность была более высокой в одной или нескольких интересующих областях, соответствующих местонахождению указанного по меньшей мере одного металлического объекта, чем в остальной части микроволнового изображения.
2. Система по п. 1, в которой средства анализа выполнены с возможностью настройки чувствительности средств (10) обнаружения, основанных на микроволновой визуализации, так чтобы указанная чувствительность была более высокой в определенной интересующей области (областях), чем в остальной части микроволнового изображения.
3. Система по п. 1 или 2, в которой средства (50) анализа выполнены с возможностью настройки чувствительности средств (10) обнаружения, основанных на микроволновой визуализации, путем изменения параметров обработки микроволнового изображения.
4. Система по любому из пп. 1-3, в которой индукционные средства (140) обнаружения расположены перед средствами (10) обнаружения, основанными на микроволновой визуализации, и/или совмещены с последними, то есть расположены в одном месте с средствами (10) обнаружения, основанными на микроволновой визуализации.
5. Система по любому из пп. 1-4, в которой индукционные средства (140) обнаружения представляют собой средства одномерного обнаружения.
6. Система по п. 5, в которой индукционные средства (140) обнаружения содержат два преобразователя (141, 142), расположенные соответственно с каждой стороны прохода, образованного индукционными средствами (140) обнаружения.
7. Система по любому из пп. 1-6, в которой индукционные средства (140) обнаружения представляют собой средства трехмерного обнаружения.
8. Система по п. 7, в которой индукционные средства (140) трехмерного обнаружения содержат по меньшей мере три преобразователя (141, 142 и 144), распределенные таким образом, что два преобразователя размещены на одной и той же стороне прохода, образованного индукционными средствами (140) обнаружения, и один преобразователь размещен на противоположной стороне, при этом указанные два преобразователя (141, 142), размещенные на одной и той же стороне прохода, разнесены в продольном направлении.
9. Система по п. 8, в которой указанные по меньшей мере три преобразователя выполнены с возможностью выделения, с одной стороны, линий обнаружения, проходящих поперек направления прохода и позволяющих, в частности, определять положение по меньшей мере одного металлического объекта на досматриваемом человеке, распознавая местонахождение указанного по меньшей мере одного объекта с передней или задней стороны досматриваемого человека, и наклонных линий обнаружения, косых по отношению к направлению движения, для выявления подозрительных объектов на человеке в поперечном направлении, распознавая местонахождение металлических объектов с левой или с правой стороны досматриваемого человека.
10. Система по п. 9, в которой угол, образованный между наклонными линиями обнаружения, составляет от 15° до 60° включительно, предпочтительно от 30° до 45° включительно.
11. Система по любому из пп. 1-10, содержащая индукционные средства (140) одномерного обнаружения, расположенные перед средствами (10) обнаружения, основанными на микроволновой визуализации и индукционными средствами (140) трехмерного обнаружения, которые совмещены, то есть расположены в одном месте, со средствами (10) обнаружения, основанными на микроволновой визуализации.
12. Система по п. 11, в которой индукционные средства (141, 142) одномерного обнаружения выполнены с возможностью распознавания присутствия или отсутствия по меньшей мере одного металлического объекта для минимизации числа неуместных тревожных сигналов, а индукционные средства (141bis, 142bis) трехмерного обнаружения выполнены с возможностью определения положения указанного по меньшей мере одного металлического объекта, обнаруженного индукционными средствами (141, 142) одномерного обнаружения, в целях максимизации точности определения местонахождения объекта.
13. Способ обнаружения запрещенных объектов, включающий следующие этапы:
- досмотр человека с применением двойной технологии, содержащей анализ с использованием индукционных средств (100) обнаружения и анализ с использованием средств (10) обнаружения, основанных на микроволновой визуализации, для получения микроволнового изображения,
- анализ сигналов, поступающих от индукционных средств (100) обнаружения,
- определение потенциального присутствия металлических объектов,
- в случае выявления потенциального присутствия по меньшей мере одного металлического объекта индукционными средствами (140) обнаружения, определение местонахождения указанного по меньшей мере одного металлического объекта, и
- соответствующую настройку чувствительности средств (10) обнаружения, основанных на микроволновой визуализации, так чтобы указанная чувствительность была более высокой в одной или более интересующих областях, соответствующих местонахождению указанного по меньшей мере одного металлического объекта, чем в остальной части микроволнового изображения.
14. Способ по п. 13, в котором на этапе настройки чувствительности чувствительность средств (10) обнаружения, основанных на микроволновой визуализации, настраивают так, чтобы указанная чувствительность была более высокой в интересующей области (областях), чем в остальной части микроволнового изображения.
15. Способ по п. 13 или 14, в котором на этапе настройки чувствительности производят изменение параметров обработки микроволнового изображения.
16. Способ по любому из пп. 13-15, дополнительно содержащий следующие последовательные подэтапы:
- определение присутствия или отсутствия по меньшей мере одного металлического объекта с целью минимизации числа неуместных тревожных сигналов,
- определение трехмерного местоположения указанного по меньшей мере одного обнаруженного таким образом металлического объекта с целью максимизации точности определения местонахождения объекта.
17. Способ по любому из пп. 13-16, дополнительно содержащий этап демонстрации на экране результата анализа с использованием индукционных средств обнаружения для поиска по меньшей мере одного металлического объекта и результата анализа с использованием средств обнаружения, основанных на микроволновой визуализации.
| WO 1999021148 A1, 29.04.1999 | |||
| СИСТЕМА ОХЛАЖДЕНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2202700C2 |
| US 2006017605 A1, 26.01.2006 | |||
| US 2013022237 A1, 24.01.2013 | |||
| US 2009041187 A1, 12.02.2009 | |||
| МНОГОДОРОЖЕЧНЫЙ БЛОК МАГНИТНЫХ ГОЛОВОК | 0 |
|
SU174394A1 |
| СПОСОБ ДОСМОТРА СКРЫТЫХ ПРЕДМЕТОВ ПОД ОДЕЖДОЙ И В ПЕРЕНОСИМОМ БАГАЖЕ ЧЕЛОВЕКА, ПЕРЕДВИГАЮЩЕГОСЯ ЕСТЕСТВЕННО | 2014 |
|
RU2564693C1 |
| СПОСОБ ДИСТАНЦИОННОГО ДОСМОТРА ЦЕЛИ В КОНТРОЛИРУЕМОЙ ОБЛАСТИ ПРОСТРАНСТВА | 2009 |
|
RU2411504C1 |
| СПОСОБ ДИСТАНЦИОННОГО ДОСМОТРА ЦЕЛИ В КОНТРОЛИРУЕМОЙ ОБЛАСТИ ПРОСТРАНСТВА | 2016 |
|
RU2639603C1 |

