Уровень техники
В качестве базы для сравнения я использую наиболее распространенный судовой движитель: традиционный гребной винт (ТГВ), - применяемый как на надводных, так и подводных аппаратах. ТГВ состоит из насаживаемой на гребной вал ступицы с лопастями, расположенными на равных угловых расстояниях одна от другой под некоторым углом к продольной оси вала ТГВ, как правило, располагаются в кормовой части судна.
Применительно к подводным аппаратам военного назначения ТГВ имеет следующий недостаток - шумность работы, что обусловлено эффектом кавитации, возникающим в процессе вращения лопастей традиционного гребного винта с достаточно большой угловой скоростью. Чтобы устранить этот недостаток, следует уменьшить угловую скорость вращения гребного винта, а чтобы сохранить прежнее количество выполняемой работы (которое выполняет ТГВ), следует увеличить площадь лопастей гребного винта. Итак, выбранный способ решения проблемы шумности гребного винта состоит в уменьшении угловой скорости его (гребного винта) вращения и в увеличении площади поверхности его (гребного винта) лопастей. Данный вопрос связан с аспектом размещения гребного винта, то есть компоновки подводного аппарата, то есть полезным использованием площади поверхности подводного аппарата, соприкасающейся с водной средой. Так, если традиционный гребной винт (ТГВ), как правило, устанавливается в кормовой части подводного аппарата, тогда используется очень малая площадь давления лопастей гребного винта на водную среду. Я предлагаю увеличить площадь давления на водную среду за счет использования бортов (а не кормы) подводного аппарата. То есть изменить компоновку подводного аппарата.
Спиралевидный гребной винт подводного аппарата (СГВПА) близок по форме к математической фигуре - цилиндрической винтовой плоскости, лежащей перпендикулярно оси его вращения (продольной оси корпуса подводного аппарата) и описанной вокруг цилиндра корпуса подводного аппарата до нескольких витков с постоянным шагом. (При этом следует учитывать, что данная цилиндрическая винтовая плоскость - не абстрактная фигура, а конкретная деталь, обладающая объемом.) То есть СГВПА осуществляет переталкивание водной среды относительно корпуса подводного аппарата вдоль бортов данного подводного аппарата при малой угловой скорости вращения СГВПА (относительно угловой скорости вращения ТГВ) и при большой площади поверхности лопастей(и) (относительно площади поверхности лопастей ТГВ).
СГВПА отличается от ТГВ не только физической формой, но и фактом использования бортов подводного аппарата (а не кормовой его части) для размещения СГВПА (для создания движущего импульса).
В качестве второй базы для сравнения я использую изобретение «Бесшумный движитель подводного судна», патент RU 2168442 С2 (7 В 63 Н 1/32). Согласно данному изобретению гребной винт расположен на платформе, выполненной в форме обода, опоясывающего с зазором цилиндр корпуса подводного аппарата на участке между выполненными на его (цилиндра корпуса подводного аппарата) наружной поверхности выступами. На платформе расположены поворотные лопатки (лопасти) через равные угловые расстояния. «Одна группа электромагнитов размещена на наружной поверхности корпуса на участке между выступами и на внутренней поверхности платформы, а другая - на торцевых поверхностях платформы и на обращенных к ним поверхностях выступов. Движитель снабжен совокупностью поворотных лопастей, установленных на наружной поверхности платформы. Электромагниты питаются от установленного в корпусе подводного судна источника электроэнергии.»
Данная конструкция, также как и СГВПА, использует борт подводного аппарата для создания движущего импульса, однако лопасть(и) СГВПА отличается по форме от поворотных лопаток, расположенных на вращающейся платформе. Кроме того, механизм вращения СГВПА отличается от вышеизложенного механизма. Площадь лопасти(ей) СГВПА больше суммарной площади поворотных лопаток, а механизм вращения СГВПА основан на вращении валов, расположенных вдоль борта подводного аппарата параллельно продольной оси подводного аппарата, электродвигателями, изолированными от забортной воды (проникновение забортной воды между ротором и статором электродвигателя исключено), что позволяет обеспечить надежность предлагаемой мной конструкции.
Сущность изобретения
Спиралевидный гребной винт подводного аппарата (СГВПА) - это разновидность гребного винта, каждая точка профиля которого повторяет цилиндрическую винтовую линию, описанную вокруг цилиндра корпуса подводного аппарата (до нескольких витков) с постоянным шагом. По форме СГВПА напоминает цилиндрическую винтовую плоскость, где отрезок некоторой длинны h, лежащий перпендикулярно оси вращения, вращается на некотором расстоянии R от нее (оси вращения) с постоянной угловой скорость вокруг неподвижной оси и одновременно перемещается поступательно с постоянной скоростью вдоль этой оси. СГВПА - это Архимедов винт, использованный по новому назначению как движитель подводного судна.
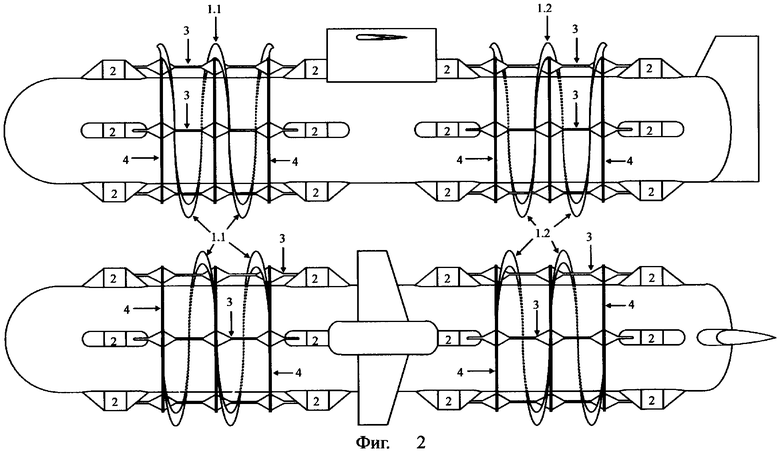
СГВПА «обвивается» по спирали вокруг цилиндра корпуса подводного аппарата и жестко крепится своим основанием к нескольким ободам (4), обвивающим по окружности цилиндр корпуса подводного аппарата перпендикулярно продольной оси корпуса подводного аппарата (Фиг.№1; №2). На внутренней стороне ободов (4) имеются зубцы, сцепленные с зубцами на шестернях, прикрепленных к валам (3). Валы (3) расположены параллельно продольной оси корпуса подводного аппарата снаружи корпуса подводного аппарата через равные угловые расстояния относительно продольной оси корпуса подводного аппарата. Валы (3) крепятся к роторам электрических двигателей (2), то есть валы (3) являются продолжением валов роторов электрических двигателей (2). Электрические двигатели (2) размещаются в герметичных обтекателях снаружи корпуса подводного аппарата через равные угловые расстояния относительно продольной оси подводного аппарата.
Для уменьшения лобового сопротивления подводного аппарата форма шестерней, которые крепятся к валам (3), должна иметь грушевидную либо двустороннюю коническую форму (Фиг.№1; №2; №4).
Для уменьшения лобового сопротивления подводного аппарата сечение профиля каждого обода (4) должно быть минимальным, поскольку обод (4) лежит в плоскости, перпендикулярной продольной оси корпуса подводного аппарата и, следовательно, перпендикулярной вектору движения подводного аппарата (Фиг.№1; №2; №4).
Для снижения шумности работы СГВПА зубцы шестерней (которые крепятся на валах (3)), а также зубцы, расположенные на внутренней стороне обода (4), должны иметь минимальный размер должны и быть покрыты слоем резины.
Чтобы ободья (4) не соскальзывали с шестерней валов (3), зубцы обода должны располагаться внутри бороздки, расположенной на внутренней стороне обода (4), поскольку в процессе вращения СГВПА на его лопасть(и) со стороны толщи воды действует сила, противоположная по направлению и равная по абсолютной величине силе давления корпуса подводного аппарата на водную толщу (второй закон Ньютона).
Механизм функционирования движителя СГВПА состоит в том, что работа электрических двигателей (2) придает вращательное движение прикрепленным к ним валам (3). Вращательное движение валов (3) передается ободьям (4), а вращение ободьев (4) влечет за собой вращение спиралевидного гребного винта подводного аппарата (1), поскольку СГВПА (1) жестко крепится к ободьям (4) (Фиг.№1; №2).
Механизм функционирования СГВПА подразумевает, что в каждый конкретный момент времени угловая скорость вращения валов (3) и роторов электродвигателей (2), относящихся к одному общему для них СГВПА, является одинаковой для этих валов и роторов электродвигателей, причем направление вращения этих валов и роторов является одинаковым. Изменение угловой скорости и направления вращения валов и роторов электродвигателей должно происходить одновременно для всех валов и роторов электродвигателей, относящихся к единому для них СГВПА.
Электрические двигатели (2), размещенные в герметичных обтекателях снаружи корпуса подводного аппарата, должны быть защищены от проникновения внутрь обтекателей забортной воды.
Компоновка подводного аппарата, оснащенного движителем СГВПА, предполагает наличие двух СГВПА на один подводный аппарат (носового СГВПА (1.1) и кормового СГВПА (1.2)) (Фиг.№1; №2). Направление вращения носового СГВПА (1.1) противоположно направлению вращения кормового СГВПА (1.2), а угловая скорость вращения носового СГВПА (1.1) равна угловой скорости вращения кормового СГВПА (1.2), то есть движители на подводном аппарате установлены по соосной схеме. Носовой СГВПА (1.1) отличается от кормового СГВПА (1.2) противоположным направлением закручивания спирали. Так носовой СГВПА (1.1) закручен по часовой стрелке (вид спереди на нос подводного аппарата), а кормовой СГВПА (1.2) закручен против часовой стрелки (вид спереди на нос подводного аппарата) (Фиг.№1; №2; №3; №4).
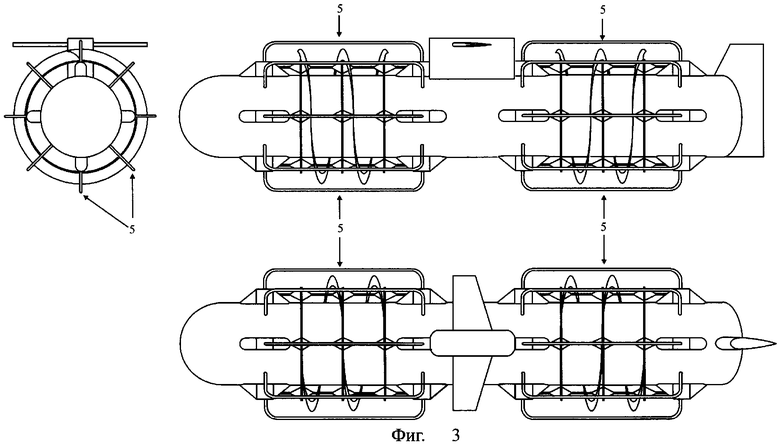
Ввиду того что СГВПА является достаточно хрупкой конструкцией, которая может разрушиться при физическом столкновении с другими объектами (дном, пирсом, бортом другого судна), целесообразно защитить СГВПА защитным каркасом (5) (Фиг.№3).
СГВПА может различаться количеством лопастей и количеством витков каждой лопасти. На схемах Фиг.№1; №2; №3; №4 показан СГВПА с одной лопастью и двумя витками.
Профиль лопасти СГВПА должен быть максимально узким и иметь наибольшую площадь давления на толщу воды. Плоскость лопасти СГВПА располагается перпендикулярно вектору движения подводного аппарата и перпендикулярно продольной оси корпуса подводного аппарата.
Для качественной характеристики СГВПА следует знать два показателя расстояния: L1 и L2. Оба показателя измеряются в единицах длинны.
L1 - путь, пройденный подводным аппаратом, оснащенным СГВПА, за один полный оборот СГВПА на 360 градусов.
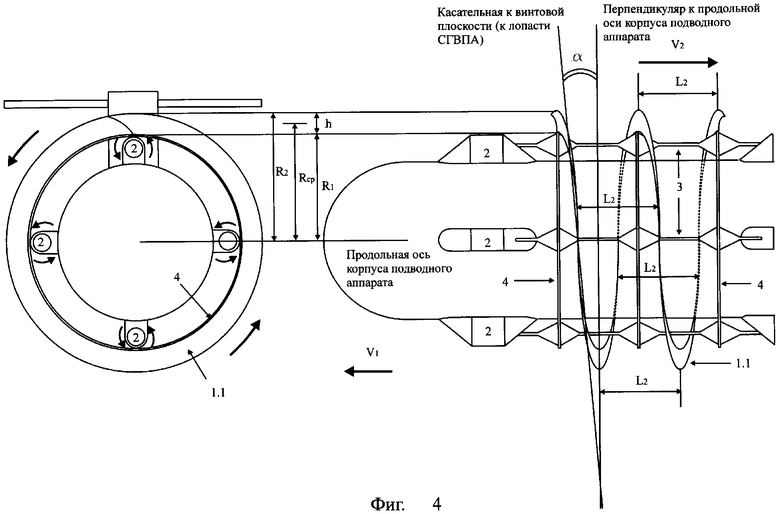
L2 - шаг СГВПА, то есть кратчайшее расстояние между двумя соседними витками винтовой линии, то есть расстояние между двумя точками, где одна из них лежит на винтовой линии, а вторая повернута по этой винтовой линии (по спирали) на 360 градусов (Фиг.№4).
Пройденный подводным аппаратом путь L1 за один полный оборот СГВПА равен шагу СГВПА L2 минус некоторая величина  .
.

Для СГВПА, как и для обычных гребных винтов, справедливо выражение: L1<L2.
Однако в отличие от обычных гребных винтов для СГВПА расстояния L1 и L2 могут быть приблизительно равны, а разница  может быть ничтожно мала (если площадь тыльной стороны лопасти (лопастей) СГВПА близка (равна) площади поперечного сечения подводного аппарата).
может быть ничтожно мала (если площадь тыльной стороны лопасти (лопастей) СГВПА близка (равна) площади поперечного сечения подводного аппарата).
Поскольку L2 является максимально возможным (но недостижимым) расстоянием, которое подводный аппарат может пройти за один полный оборот СГВПА на 360 градусов, то максимально возможной (но недостижимой) скоростью для подводного аппарата, оснащенного СГВПА, является скорость V2.
V2=L2/t1
Условимся, что время оборота СГВПА на 360 градусов равно t1. Соответственно, реальная скорость подводного аппарата V1 будет всегда меньше максимально возможной скорости V2 на некоторую величину  V.
V.
V1=L1/t1
 V=(L2-L1)/t1
V=(L2-L1)/t1
Наилучшие характеристики СГВПА достигаются, когда отношение L1/L2 близко к единице.
Анализ сил, действующих со стороны СГВПА и корпуса подводного аппарата на воду, возможно произвести, используя формулу гидродинамического сопротивления. Так, сила F1, с которой корпус подводного аппарата давит на воду в процессе движения, равна:

где Сх1 - коэффициент полного сопротивления воды корпусу подводного аппарата (учитывает как лобовое сопротивление, так и боковое трение). Данный коэффициент определяется физической формой корпуса подводного аппарата без учета СГВПА.
S пл.ап. - площадь поверхности корпуса подводного аппарата без учета площади поверхности СГВПА.
q - плотность воды.
V1 - прямолинейная и равномерная скорость поступательного
движения подводного аппарата относительно окружающей водной среды как
инерционной системы (V1=L1/t1).
Аналогично можно представить силу F2, с которой СГВПА давит на
толщу воды, окружающую аппарат в направлении, противоположном
направлению вектора скорости V1 (прямолинейного и равномерного движения
аппарата) и совпадающим с вектором скорости V2.
где С х2 - коэффициент полного сопротивления воды лопасти СГВПА.
S пл.СГВПА - площадь поверхности лопастей СГВПА.
q - плотность воды.
V2 - отношение шага СГВПА к интервалу времени, за который
происходит оборот СГВПА на 360 градусов (V2=L2/t1).
При прямолинейном и равномерном поступательном движении подводного аппарата, оснащенного СГВПА, согласно второму закону Ньютона соблюдается равенство F1=F2, следовательно, справедливо следующее равенство:
Данное равенство можно считать основой для расчета характеристик СГВПА.
Проанализируем подробнее факторы: С x2 и S пл.СГВПА.
Для этого нужно цилиндрическую винтовую линию, существующую в объеме (в трехмерном пространстве), представить на плоскости (в двухмерном пространстве) (Фиг.№4).
Если провести касательную к цилиндрической винтовой линии и спроецировать ее на перпендикуляр к продольной оси, вокруг которой идет винтовая линия, то окажется, что касательная к оси лежит под некоторым острым углом α. Величина угла α характеризуется равенством:
tg α=L2/2πRср
Rcp=(R1+R2)/2
h=R2-R1
Средняя длинна лопасти СГВПА - Ncp равна:

Длинна винтовой линии, проведенной по основанию профиля лопасти СГВПА -N1, равна:

Длинна винтовой линии, проведенной по вершине профиля лопасти СГВПА - N2, равна:

Площадь тыльной стороны лопасти СГВПА - SСГВПА равна:
SСГВПА=Nср h
h
Величину угла α можно представить как
sin α=L2/Nср
Угол α, под которым касательная к винтовой линии наклонена к перпендикуляру к продольной оси корпуса подводного аппарата (оси вращения СГВПА), характеризует СГВПА: чем острее угол α, тем меньше шаг СГВПА (L2), что уменьшает максимально возможный путь, который подводный аппарат может пройти за один полный оборот СГВПА на 360 градусов (влияет на скорость движения подводного аппарата), но, с другой стороны, чем острее угол α, тем выше КПД СГВПА. С точки зрения повышения КПД и бесшумности вращения СГВПА целесообразно, чтобы угол α был более острым.
Итак, Сх2 (коэффициент полного сопротивления воды лопасти СГВПА) равен следующему выражению:
Сх2=Cx*cos α
где Сх - коэффициент полного сопротивления воды тонкой плоской
пластине, давящей на воду перпендикулярно своей плоскости.
Таким образом мы можем рассчитать характеристики лопасти СГВПА:
1. Площадь тыльной стороны лопасти СГВПА (SСГВПА=Ncp*h);
2. Коэффициент полного сопротивления лопасти СГВПА (Cx2=Cx*cosα);
3. Скорость перемещения лопасти вдоль борта подводного аппарата (V2=L2/t1),
- что необходимо для расчета гидродинамического сопротивления лопасти СГВПА.
Обозначения в вышеприведенных формулах следующие:
Ncp - средняя длинна лопасти СГВПА.
N1 - длинна винтовой линии, которую описывает основание профиля лопасти СГВПА.
N2 - длинна винтовой линии, которую описывает вершина профиля лопасти СГВПА.
R1 - малый радиус (кратчайшее расстояние между продольной осью подводного аппарата и основанием лопасти СГВПА) (Фиг №4).
R2 - большой радиус (кратчайшее расстояние между продольной
осью подводного аппарата и вершиной лопасти СГВПА) (Фиг №4).
Rср - средний радиус (средняя арифметическая величина между
малым и большим радиусами) (Фиг №4).
h - высота профиля лопасти СГВПА (Фиг.№4).
k - количество витков лопасти СГВПА вокруг цилиндра корпуса подводного аппарата. На схемах Фиг.№1; №2; №3; №4 величина k=2.
В заключение хочу упомянуть, что количество лопастей СГВПА ограничивается фактором турбулентности. То есть между лопастями СГВ в воде возникают вихри, ухудшающие качественные характеристики СГВПА, поэтому количество лопастей не должно быть слишком большим, а расстояние между соседними витками не должно быть слишком малым.
Краткое описание чертежей
Фиг.№1. На схеме Фиг.№1 изображен подводный аппарат, оснащенный двумя спиралевидными гребными винтами (носовым СГВПА и кормовым СГВПА). Представлен вид спереди, сбоку и сверху.
Фиг.№2. На схеме Фиг.№2 представлен подводный аппарат, оснащенный парой СГВПА (вид сбоку и вид сверху) в более укрупненном масштабе, чем на схеме Фиг.№1.
Фиг.№3. На схеме Фиг.№3 представлен подводный аппарат, оснащенный парой СГВПА (вид спереди, вид сбоку и вид сверху), а также защитным каркасом, предохраняющим лопасти СГВПА.
Фиг.№4. На схеме Фиг.№4 представлен носовой СГВПА с изображением обозначений, необходимых для проектирования СГВПА.
Сведения, подтверждающие возможность и целесообразность осуществления изобретения
Не существует неразрешимых технических проблем, препятствующих созданию подводного аппарата, оснащенного спиралевидным гребным винтом.
Целесообразность внедрения СГВПА объясняется бесшумностью работы СГВПА. Бесшумность обусловлена тем, что при относительно минимальной угловой скорости вращения СГВПА имеет место относительно максимальная площадь поверхности лопасти(ей) СГВПА. При этом отношение пройденного аппаратом пути к шагу СГВПА (L1 / L2) близко к единице (в отличие от обычных гребных винтов). Это, в свою очередь, обусловлено тем, что площадь тыльной стороны СГВПА (S пл.СГВ) близка к площади поперечного сечения корпуса подводного аппарата (S пл.сеч.ап.), то есть отношение S пл.СГВ/ S пл.сеч.ап. близко к единице и даже может превышать ее (в отличие от обычных гребных винтов, площадь лопастей которых на порядок меньше площади поперечного сечения подводного аппарата).
Для обычных гребных винтов требуемая скорость поступательного движения подводного аппарата достигается за счет высокой угловой скорости вращения гребных винтов в ущерб бесшумности их работы. Требуемая скорость поступательного движения подводного аппарата, оснащенного СГВПА, достигается за счет высокой площади лопасти(ей) СГВПА при низкой угловой скорости его вращения, что способствует бесшумности хода подводного аппарата.
Образно говоря, работа СГВ напоминает вкручиваемый в толщу материала (водную толщу) шуруп.
Для гребных винтов (в том числе и для СГВПА) справедлив тезис о том, что наибольшую полезную работу совершает та часть лопасти, которая находится дальше от ступки (от оси вращения гребного винта) и в процессе вращения описывает наиболее длинную дугу по наибольшему радиусу. Форма СГВПА такова, что его лопасть(и) находится на предельно удаленном расстоянии от продольной оси корпуса подводного аппарата, что повышает КПД СГВПА относительно обычного гребного винта, радиус которого значительно меньше радиуса поперечного сечения цилиндра корпуса подводного аппарата.
СГВ имеет свои недостатки:
1. Конструкция СГВ хрупка при соприкосновении с внешними предметами - дном моря, пирсом, бортом другого судна. Однако наличие защитного каркаса устраняет этот недостаток.
2. Вращение валов, оснащенных зубчатыми шестернями, и ободьев, внутренняя поверхность которых также оснащена зубцами, ведет к появлению шумов. Однако величина этих шумов незначительна.
Изобретение относится к судостроению и касается проектирования спиралевидных гребных винтов для подводных аппаратов. Спиралевидный гребной винт подводного аппарата имеет ступицу из нескольких ободов, охватывающих с зазором цилиндр корпуса подводного судна. К ободам жестко прикреплены лопасти, представляющие по форме винтовую поверхность, описанную вокруг цилиндра корпуса подводного аппарата до нескольких витков с постоянным шагом. Ободы соприкасаются с не менее чем тремя валами, протянутыми снаружи вдоль корпуса подводного аппарата, расположенными через равные угловые пространства относительно продольной оси цилиндра корпуса подводного аппарата и приводимыми во вращение электрическими двигателями. Электрические двигатели расположены по контуру окружности поперечного сечения корпуса подводного аппарата внутри герметичных обтекателей. Изобретение позволяет повысить эксплуатационные качества гребного винта, в частности повышает надежность его работы и обеспечивает бесшумность его эксплуатации. 4 ил.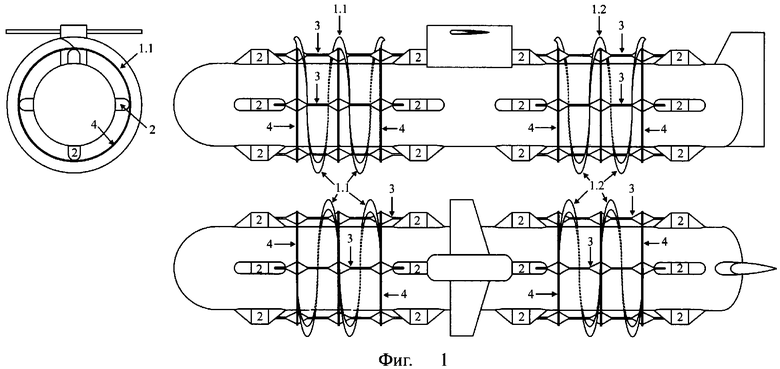
Спиралевидный гребной винт подводного аппарата, содержащий ступицу из нескольких ободов, охватывающих с зазором цилиндр корпуса подводного судна, к которым жестко прикреплены лопасти, представляющие по форме винтовую поверхность, описанную вокруг цилиндра корпуса подводного аппарата до нескольких витков с постоянным шагом, отличающийся тем, что ободы соприкасаются с не менее чем тремя валами, протянутыми снаружи вдоль корпуса подводного аппарата, расположенными через равные угловые пространства относительно продольной оси цилиндра корпуса подводного аппарата и приводимыми во вращение электрическими двигателями, расположенными по контуру окружности поперечного сечения корпуса подводного аппарата внутри герметичных обтекателей.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| БЕСШУМНЫЙ ДВИЖИТЕЛЬ ПОДВОДНОГО СУДНА | 1999 |
|
RU2168442C2 |
| КОРМОВАЯ ОКОНЕЧНОСТЬ ПОДВОДНОЙ ЛОДКИ | 2000 |
|
RU2166456C1 |

