Изобретение относится к области электротехники и может быть использовано в промышленности и на транспорте для регулирования загрузки электродвигателей переменного тока, а также в электроэнергетике при контроле загрузки генераторов электрической энергии.
Известны векторные методы управления электродвигателями переменного тока, основанные на определении суммарных векторов тока и потокосцепления, формируемых обмотками электрической машины в трехфазной (а, b, с) или двухфазной (α, β) системах координат, в соответствие с известной теорией рабочих процессов электрических машин переменного тока (см. Копылов И.П. Электрические машины: Учебник для вузов М.: Энергоатомиздат, 1986. - 360 с.).
Недостатком данных методов является невозможность определить механический момент и механическую мощность, формируемые в процессе преобразования энергии, в отдельно рассматриваемых обмотках, то есть невозможность соотнести каждой обмотке электрической машины развиваемые ей механический момент и механическую мощность при работе электродвигателя. Признаком данных методов, накладывающим обозначенные ограничения, является необходимость преобразования динамических параметров (тока и потокосцепления), характеризующих процессы в трех фазах обмотки электродвигателя, в результирующие вектора данных параметров, откладываемые в прямоугольных координатах, связанных с ротором. Это затрудняет управление несимметричными режимами работы электродвигателей, например, исключая возможность выявления и предотвращения несимметричного короткого замыкания в обмотках электродвигателя. Также указанный недостаток препятствует построению универсальных алгоритмов управления электродвигателями или генераторами вне зависимости от их принципа действия, так как определение развиваемого электромагнитного момента производится с учетом конструкции машины, налагающей ограничения на рассматриваемые способы формирования электромагнитного момента.
Известен способ измерения электромагнитного момента трехфазного асинхронного двигателя (авторское свидетельство СССР №342093, МПК G01L3/00, опуб. 1972). В способе измеряют действительные токи и напряжения статора двигателя, значения которых подают на вход вычислительного устройства, с помощью которого вычисляют момент по зависимости

где
 - резуттирующий вект ор пот око сцепления статора,
- резуттирующий вект ор пот око сцепления статора,
 - результирующий вектор тока статора.
- результирующий вектор тока статора.
Однако, нелинейная зависимость магнитной проницаемости стали магнитопровода от напряженности магнитного поля (обуславливающая явление "насыщения" магнитопровода) приводит к тому, что на каждую составляющую результирующего потокосцепления статора оказывают влияние токи, протекающие в иных фазах обмотки двигателя. В связи с этим, использование метода наложения при определении результирующего вектора потокосцепления статора, вносит погрешность в расчет электромагнитного момента, увеличивающуюся по мере повышения электромагнитных нагрузок электрической машины.
Известен способ определения электромагнитного момента двигателя переменного тока (авторское свидетельство СССР №1508111, МПК G01L 3/10, опуб. 15.09.1989). Согласно способу, измеряют текущее значение фазных токов в цепи питания двигателя, по которым находят результирующий вектор тока статора I1, а также измеряют реактивную мощность W двигателя, по величине которых вычисляют значение тока Iн намагничивания. Начиная с момента времени Т0, при котором достигается равенство любых двух фазных токов, находят текущее значение углов α(t) и β (t), и в момент времени t1 фиксируют значения α(t1) и β(t1), с учетом величины которых рассчитывают электромагнитный момент.
Однако, определение электромагнитного момента, согласно данному патенту, производится в конкретный момент времени вращения вала электрической машины, что снижает точность расчетов при изменении скорости вращения ротора электрической машины.
Известен способ определения электромагнитного момента, развиваемого асинхронным электродвигателем (патент RU 2301975, МПК G01L 3/10, опуб. 27.06.2007). В способе осуществляют измерения токов и напряжений в фазах сети, питающей асинхронный двигатель. При этом дополнительно измеряют длину кабеля, соединяющего двигатель с сетью, определяют потери фазных напряжений на индуктивном и на омическом сопротивлениях жил кабельной линии, алгебраически суммируют их с действительными значениями одноименных фазных напряжений питающей сети.
Полученные трехфазные напряжения и измеренные фазные токи питающей сети используют в процессе определения результирующего вектора потокосцепления статора и результирующего вектора тока статора.
В соответствии с данным способом, электромагнитный момент определяется на основании выражения

где Ψст - результирующий вектор потокосцепления статора; Iст - результирующий вектор тока статора.
Определение Ψст, Iст производится на основании преобразования трехфазной системы токов и потокосцепления отдельных обмоток в их проекции в прямоугольных проекциях связанных с ротором.
Недостатком способа является ограничение, связанное с определением только электромагнитного момента у асинхронных электродвигателей, а также невозможность соотнести каждой обмотке электродвигателя соответствующую ей часть развиваемой электродвигателем механической мощности или электромагнитного момента.
Наиболее близким к заявляемому является способ управления электромагнитным моментом асинхронного электродвигателя с короткозамкнутым ротором (патент RU 2476982, МПК Н02Р 21/00, опуб. 27.02.2013). В способе по измеренным текущим значениям тока статора и входного постоянного напряжения автономного инвертора напряжения вычисляют текущие значения электромагнитного момента и потокосцепления статора, регулирование текущих значений модулей векторов которых осуществляют по двум каналам с использованием релейных регуляторов электромагнитного момента и потокосцепления статора. Выходной вектор напряжения автономного инвертора напряжения выбирают по таблице переключения и обеспечивают постоянство угла между текущим вектором потокосцепления статора и текущим вектором тока статора. Формируют выходной вектор напряжения автономного инвертора напряжения путем управления силовыми полупроводниковыми ключами автономного инвертора напряжения.
Основным недостатком способа, как и предыдущего аналога, является ограничение, связанное с определением только электромагнитного момента у асинхронных электродвигателей, а также невозможность соотнести каждой обмотке электродвигателя соответствующую ей часть развиваемой электродвигателем механической мощности или электромагнитного момента
Технической проблемой заявляемого изобретения является создание способа управления работой электродвигателя переменного тока, основанного на определении электромагнитного момента и механической мощности в каждой отдельной обмотке электродвигателя.
Технический результат заключается в повышении точности измерений электромагнитного момента и мощности в каждой отдельной обмотке электродвигателя, при сокращении разницы между расчетными и измеренными значениями этих величин.
Для достижения заявляемого результата в способе управления электродвигателем переменного тока, включающем установку заданного значения электромагнитного момента, измерение текущего значения тока и электрического напряжения, определение фактического значения электромагнитного момента, согласно изобретению, значения электромагнитного момента задают на каждой из обмоток и дополнительно задают на каждой из обмоток значения механической мощности, текущие значения тока и электрического напряжения измеряют в каждой из обмоток, рассчитывают значение текущей скорости изменения тока в обмотках электродвигателя, формируют сигнал, соответствующий текущему угловому положению вала электродвигателя, определяют значение собственной индуктивности каждой из обмоток электродвигателя и рассчитывают значения активного сопротивления обмоток, вычисляют значение механической мощности, развиваемой каждой отдельной обмоткой, и определяют суммарную механическую мощность, фактическое значение электромагнитного момента определяют в каждой отдельной обмотке электродвигателя и определяют суммарный электромагнитный момент, сравнивают заданные и фактические значения суммарной механической мощности и электромагнитного момента и на основании разности заданных и фактических значений механической мощности и электромагнитного момента управляют электродвигателем путем регулирования напряжения, подаваемого на его обмотки, при этом значение механической мощности, развиваемой каждой отдельной обмоткой, определяют из условия:

где i - электрический ток, протекающий в каждой отдельной обмотке; u - текущее электрическое напряжение, подаваемое на каждую обмотку; R - активное сопротивление каждой обмотки; L - значение собственной индуктивности обмотки; Δi - приращение тока в рассматриваемой обмотке электродвигателя, соответствующее изменению времени Δt.
Изобретение поясняется чертежами, где представлено:
на фиг. 1 - структурная схема устройства для реализации заявляемого способа,
на фиг. 2 - сопоставление результатов расчетов механической мощности, развиваемой электродвигателем, определенной на основании известного выражения и предлагаемого способа.
Позициями на чертежах обозначены:
1 - инвертор;
2, 3, 4 - датчики электрических напряжений u1, u2, … поданных на фазные обмотки электродвигателя;
5, 6, 7 - дифференциальные преобразователи;
8, 9, 10 - блоки определения значений активных сопротивлений фазных обмоток в зависимости от их температуры и конструкции электрического двигателя;
11, 12, 13 - блоки определения значений индуктивностей обмоток электрического двигателя;
14 - датчик положения вала электродвигателя;
15 - датчик температуры обмоток электродвигателя;
16, 17, 18 - блоки расчета механической мощности в каждой из обмоток;
19 - блок определения суммарной механической мощности;
20 - блок пропорционально-интегрально-дифференциального (ПИД) регулирования напряжения, подаваемого на обмотки электродвигателя;
21 - трехфазный электрический двигатель;
22, 23, 24 - датчики фазных токов i1, i2, … электрического двигателя;
25 - блок определения суммарного электромагнитного момента;
26, 27, 28 - блоки определения (расчета) моментов, формируемых физическими процессами в отдельных обмотках электрического двигателя;
29 - блок определения угловой скорости вращения вала электродвигателя.
Для пояснения сути изобретения рассмотрим запись закона сохранения энергии при работе электрической машины в виде баланса мощностей наблюдаемого в каждое мгновение времени:

где Рэл. - мощность потребляемая обмоткой электрической машины; Ртеп. - мощность тепловых потерь в активном сопротивлении обмотки электрической машины; Рмаг. - мощность изменения величины магнитной энергии, формируемой током, протекающим в рассматриваемой обмотке электрической машины; Рмех. - мощность преобразования энергии в механическую форму движения подвижного элемента (ротора) электрической машины, формируемую процессами в рассматриваемой обмотке.
С другой стороны, так как процесс электромеханического преобразования энергии можно представить в виде последовательного преобразования электрической энергии в магнитную форму, из которой, в дальнейшем, происходит преобразование в механический вид энергии, закон сохранения энергии при работе электрической машины можно записать в виде

где Рмаг.полн. - мощность преобразования магнитной энергии из электрической формы, определяемая суммой:

Из выражения (3) можно выразить величину механической мощности в виде:

Определим значение Рмаг.полн. в виде выражения:

где i - электрический ток, протекающий в рассматриваемой обмотке; u - мгновенное напряжение питания, поданное на рассматриваемую обмотку; R - активное сопротивление рассматриваемой обмотки электрической машины; L - мгновенное собственное значение индуктивности обмотки электрической машины. Величину Рмаг. следует выразить в виде:

где Δi - приращение тока в рассматриваемой обмотке электрической машины, соответствующее изменению времени Δt.
Подставляя выражения (5, 6) в (4) найдем выражение механической мощности, развиваемой отдельно рассматриваемой обмоткой электрической машины:

На основании выражения (7) электромагнитный момент, развиваемый протекающими токами в каждой отдельной обмотке электродвигателя определится согласно выражения:

где w - угловая скорость вращения вала электродвигателя, об/сек.
Таким образом, зная величину активного сопротивления обмотки электродвигателя R, напряжение питания u, ток, протекающий в обмотке i, а также скорость изменения тока в виде отношения Δi/Δt можно определить значение механической мощности развиваемой каждой из неограниченного количества N обмоток электрической машины, а также определить их суммарную величину

Аналогично, суммируя электромагнитные моменты (8), развиваемые токами, протекающими в каждой обмотке, можно определить суммарный электромагнитный момент, развиваемый электродвигателем.

На основании найденных величин механических мощностей (7) и электромагнитных моментов (8) становится возможным выявить несимметричные режимы работы электрической машины, связанные с биением величины электромагнитного момента, возникающие вследствие изменения активного сопротивления или напряжения питания, подаваемого на обмотку, выхода из строя подшипников, а также за счет биений электромагнитного момента нагрузки электрического двигателя.
Задавая требуемые значения электромагнитных моментов, развиваемых отдельными обмотками M1+M2+…+MN и/или механических мощностей Рмех. 1.зад., Рмех.2.зад., Рмех.3.зад., а также их суммарного значения Мсум.зад, Рмех.сум.зад, можно на основе стандартного алгоритма пропорционально-интегрально-дифференциального (ПИД) регулирования осуществить формирование сигналов управления инвертором, соответственно изменяя напряжение питания обмоток электрического двигателя.
Таким образом, предлагаемый способ сопоставления процессом электромеханического преобразования энергии, рассматриваемым отдельно в каждой обмотке электродвигателя, величин механической мощности и электромагнитного момента, позволяет управлять электрическим двигателем в несимметричных штатных и аварийных режимах его работы, а также является универсальным способом управления электродвигателями произвольной конструкции и принципа действия с неограниченным значением фазных обмоток.
Питание трехфазного электрического двигателя 21 осуществляется от питающей сети через управляемый инвертор 1. В питающей цепи каждой из трех фаз обмоток включены датчики тока 22, 23, 24, выдающие информацию о величинах токов i1, i2, i3, соответственно в первой, во второй и в третьей фазных обмотках двигателя. Также, текущее электрическое напряжение, подаваемое на каждую из обмоток электродвигателя, измеряется датчиками напряжения 2, 3, 4, формирующими значения величин напряжений на фазных обмотках u1, u2, u3. Датчики тока соединены с дифференциальными преобразователями 5, 6, 7, рассчитывающими значение текущей скорости изменения тока в обмотках электродвигателя Δi1/Δt, Δi2/Δt, Δi3/Δt. Датчик положения вала электродвигателя 14 формирует сигнал, соответствующий текущему угловому положению вала электродвигателя α. На основании известной конструкции электродвигателя, по сигналам от датчиков тока и углового положения вала электродвигателя блоками 11, 12, 13, определяется расчетное значение собственной индуктивности каждой из обмоток электродвигателя на основании зависимости

Учет зависимости индуктивности от величин токов в обмотках электродвигателя необходим для учета явлений насыщения магнитопровода электродвигателя. На основании информации от датчика температуры обмоток электродвигателя 15 определяются расчетные значения активного сопротивления обмоток электродвигателя на основании известной из конструкции электродвигателя зависимости

где Т - температура обмоток. Учет зависимости активных сопротивлений обмоток от температуры позволит учесть температурный коэффициент изменения активного сопротивления обмоток.
На основании информации о величине тока i, ее скорости изменения Δi/Δt, индуктивности обмотки L, активного сопротивления R и напряжения питания и, определенных в отношении каждой из трех обмоток электродвигателя в блоках 16, 17, 18 структурной схемы, представленной на фиг. 1, на основании выражения (7) вычисляется значение механической мощности, развиваемой каждой отдельной обмоткой. В блоке 19 производится суммирование механических мощностей Рмех.1., Рмех.2., Рмех.3, развиваемых отдельными обмотками и определение суммарной механической мощности Рмех.сум.
В блоках 26, 27, 28 в соответствии с выражением (8) определяются величины электромагнитных моментов M1, М2, М3, развиваемых в соответствии с протекающими токами в фазах обмоток электродвигателя. При этом используется значение угловой скорости вращения вала электродвигателя, определяемой с помощью блока 29. В блоке 25 они суммируются, определяя суммарный электромагнитный момент, развиваемый электродвигателем Мсум.
Информация о значениях фактических и заданных механических мощностей и электромагнитных моментов поступает в блок ПИД регулирования 20, в котором формируются сигналы управления инвертором 1.
Осуществление изобретения возможно при реализации алгоритма, представленного на фиг. 1. Верность предлагаемого способа подтверждается математическим моделированием рабочих процессов моментного электродвигателя. Сравнение динамических зависимостей суммарной механической мощности, развиваемой электродвигателем, согласно выражения (9) и согласно известного выражения

где Мсум.изв. определено на основании расчетов распределения электромагнитного поля в конструкции электродвигателя, в зависимости от токов и скорости вращения вала электродвигателя, представлено на фиг. 2. Присутствующие на графике броски до нулевого значения механической мощности, определенной согласно (9), происходят в моменты перехода через нулевое значение электрических напряжений, подаваемых на фазные обмотки и могут быть отфильтрованы в процессе расчетов.
Затем сравнивают заданные и фактические значения суммарной механической мощности и электромагнитного момента и на основании разности заданных и фактических значений механической мощности и электромагнитного момента управляют электродвигателем путем регулирования напряжения, подаваемого на его обмотки.
Таким образом, в заявляемом изобретении задача решается за счет определения механической нагрузки электродвигателя, относящейся к отдельной, рассматриваемой обмотке, как разности между расчетной мощностью изменения магнитной энергии, определяемой токами в данной обмотке, и потребляемой обмоткой электрической мощностью за исключением мощности потерь на активном сопротивлении обмотки.
Способ позволяет повысить точность измерений электромагнитного момента и мощности в каждой отдельной обмотке электродвигателя при сокращении разницы между расчетными и измеренными значениями этих величин.

Изобретение относится к области электротехники и может быть использовано для регулирования загрузки электродвигателей переменного тока. Технический результат заключается в повышении точности измерений электромагнитного момента и мощности. Для достижения заявляемого результата в способе управления электродвигателем переменного тока, включающем установку заданного значения электромагнитного момента, измерение текущего значения тока и электрического напряжения, определение фактического значения электромагнитного момента, значения электромагнитного момента задают на каждой из обмоток, задают на каждой из обмоток значения механической мощности, текущие значения тока и электрического напряжения измеряют в каждой из обмоток, формируют сигнал, соответствующий текущему угловому положению вала электродвигателя, определяют значение собственной индуктивности каждой из обмоток электродвигателя, определяют суммарную механическую мощность, фактическое значение электромагнитного момента определяют в каждой отдельной обмотке электродвигателя и определяют суммарный электромагнитный момент, на основании разности заданных и фактических значений механической мощности и электромагнитного момента управляют электродвигателем путём регулирования напряжения, подаваемого на его обмотки. 2 ил.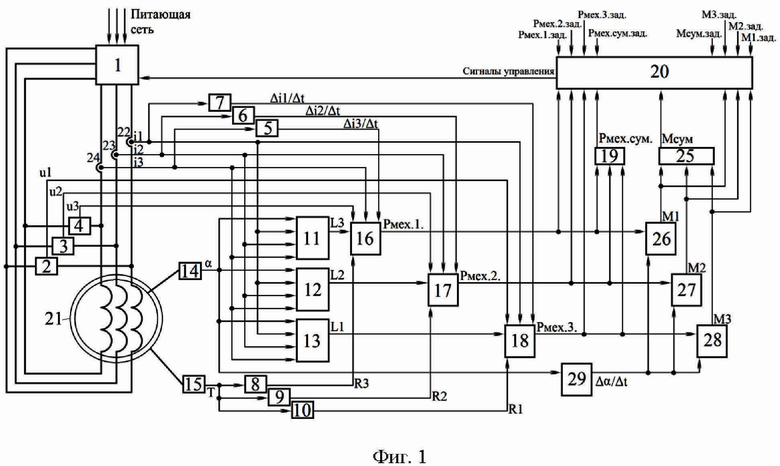
Способ управления электродвигателем переменного тока, включающий установку заданного значения электромагнитного момента, измерение текущего значения тока и электрического напряжения, определение фактического значения электромагнитного момента, отличающийся тем, что значения электромагнитного момента задают на каждой из обмоток и дополнительно задают на каждой из обмоток значения механической мощности, текущие значения тока и электрического напряжения измеряют в каждой из обмоток, рассчитывают значение текущей скорости изменения тока в обмотках электродвигателя, формируют сигнал, соответствующий текущему угловому положению вала электродвигателя, определяют значение собственной индуктивности каждой из обмоток электродвигателя и рассчитывают значения активного сопротивления обмоток, вычисляют значение механической мощности, развиваемой каждой отдельной обмоткой, и определяют суммарную механическую мощность, фактическое значение электромагнитного момента определяют в каждой отдельной обмотке электродвигателя и определяют суммарный электромагнитный момент, сравнивают заданные и фактические значения суммарной механической мощности и электромагнитного момента и на основании разности заданных и фактических значений механической мощности и электромагнитного момента управляют электродвигателем путем регулирования напряжения, подаваемого на его обмотки, при этом значение механической мощности, развиваемой каждой отдельной обмоткой, определяют из условия

где i - электрический ток, протекающий в каждой отдельной обмотке;
u - текущее электрическое напряжение, подаваемое на каждую обмотку;
R - активное сопротивление каждой обмотки;
L - значение собственной индуктивности обмотки;
Δi - приращение тока в рассматриваемой обмотке электродвигателя, соответствующее изменению времени Δt.
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2011 |
|
RU2476982C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРЁХФАЗНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2017 |
|
RU2735092C2 |
| US 5059878 A, 22.10.1991 | |||
| CN 108900139 A, 27.11.2018. | |||

