Изобретение относится к области электротехники, а именно к способам управления электромагнитным моментом и амплитудой потокосцепления статора электрической машины переменного тока (ЭМ), получающей питание от автономного инвертора напряжения (АИН) со стороны статора.
Известны способы управления величиной электромагнитного момента электрической машины переменного тока (Усольцев А.А. Частотное управление асинхронными двигателями. - СПб.: СПбГУ ИТМО, 2006. - 94 с.; Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием. - М.: Академия, 2006. - 272 с.; Bocker J., Mathapati S. State of the art of induction motor control // IEEE Transactions on industry applications, №1, 2007. - P.1459-1464).
Из этих обзоров следует, что наиболее распространенным вариантом управления электромагнитным моментом ЭМ являются системы управления с ориентацией по векторам магнитных потоков. Указанные способы включают в себя установку заданных значений амплитуды магнитного потока статора или ротора и электромагнитного момента, измерение значений фазных токов и напряжений, а также частоты вращения или углового положения ротора, вычисление углового положения и амплитуды результирующего вектора потока ротора и электромагнитного момента, сравнение заданных и действительных значений амплитуды вектора потока ротора и электромагнитного момента, формирование заданных значений составляющих результирующего вектора тока статора в системе координат, связанной с вектором потока ротора или статора, вычисление заданных значений фазных токов в системе координат, связанной со статором при помощи обратных координатных преобразований, регулирование тока статора при помощи открывания соответствующих ключей АИН.
Недостатками указанного способа являются: большой объем вычислений при прямом и обратном взаимном преобразовании неподвижной и вращающейся систем координат; необходимость осуществления специальных мероприятий по идентификации параметров ЭМ для повышения качества управления (измерение частоты вращения вала ЭМ не всегда возможно, поэтому частоту вращения ротора оценивают по измеренным значениям токов и напряжений статора); наличие запаздывания при формировании электромагнитного момента, что вызвано инерционностью контуров регулирования составляющих тока статора и регуляторов тока.
Системы управления с ориентацией по векторам потоков обладают следующими достоинствами: высокое качество регулирования при условии точного измерения частоты вращения или углового положения вала ЭМ; малая амплитуда колебаний электромагнитного момента и амплитуды потока ротора; ограничение амплитуды фазных токов электродвигателя предельным значением (реализуется в регуляторах составляющих заданного результирующего вектора тока статора).
Другим подходом к задаче управления электрической машиной переменного тока является система прямого управления моментом [USA patent №4678248. Int. CI. H02P 7/36. Direct self-control of the flux and rotary moment of a rotary-field machine / Depenbrock M. - Filed: Oct, 18. 1985. Date of the patent: Jul. 7, 1987]. Указанный способ включает в себя установку заданных значений амплитуды результирующего вектора потока статора и электромагнитного момента, вычисление амплитуды и углового положения вектора потока статора, сравнение заданных и действительных значений электромагнитного момента и амплитуды вектора потока статора, формирование сигналов управления ключами АИН в соответствии с таблицей оптимальных переключений.
Достоинством указанного способа является возможность быстрого формирования заданного электромагнитного момента и амплитуды вектора потока статора.
Недостатками системы прямого управления моментом являются: отсутствие ограничения амплитуды тока статора, повышенная амплитуда колебаний электромагнитного момента и амплитуды вектора потока статора ЭМ.
Наиболее близким по технической сущности к заявляемому является способ управления электромагнитным моментом [Патент РФ №2395157, МПК Н02Р 27/00. Способ управления величиной электромагнитного момента электрической машины переменного тока (варианты) / Е.К.Ещин, А.В.Григорьев, И.А.Соколов. - Заявл.: 31.03.2008. Опубл.: 20.07.2010. Бюл. №20]. Указанный способ включает установку заданного значения электромагнитного момента, измерение и вычисление значений фазных токов и напряжений обмоток статора машины для определения мгновенных значений электромагнитного момента и потокосцеплений статора и последующее формирование заданных значений напряжений в каждой фазе статора и управление электромагнитным моментом ЭМ путем изменения напряжений в каждой фазе.
Недостатками указанного способа являются: отсутствие ограничения амплитуды тока статора в режимах пуска и изменения амплитуды потокосцепления статора, что может привести к выходу из строя инвертора и перегреву электродвигателя; неустойчивость к неточности идентификации переменных электродвигателя, которая при отсутствии контроля над амплитудой магнитного потока может привести к размагничиванию или насыщению стали ЭМ и полной неработоспособности электропривода.
Задачей изобретения является повышение надежности системы управления электромагнитным моментом электропривода при помощи следующих мероприятий: введение контура регулирования амплитуды результирующего вектора потока статора; жесткое ограничение амплитуды результирующего вектора тока статора на заданном (допустимом) уровне.
Техническим результатом изобретения является повышение надежности системы управления в условиях неточности идентификации параметров и координат электропривода, улучшение эксплуатационных характеристик двигателя и повышение надежности электропривода.
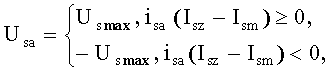
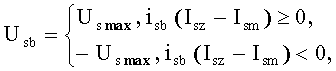
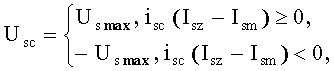
Указанный технический результат достигается тем, что в предлагаемом способе управления электромагнитным моментом и магнитным потоком электрической машины переменного тока, включающем установку заданного значения электромагнитного момента, установку заданного значения амплитуды потокосцепления статора, установку предельного значения тока статора, измерение и вычисление значений фазных токов и напряжений обмоток статора машины для определения мгновенных значений электромагнитного момента и потокосцеплений статора, согласно изобретению измеряют значение амплитуды тока статора, сравнивают его с заданным предельным значением, и если амплитуда тока статора превышает предельное значение, то управляющие воздействия формируют следующим образом:
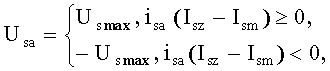
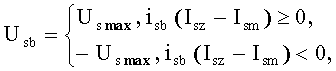
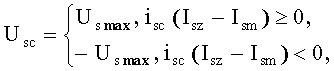
где Us max - максимально допустимое значение фазного напряжения обмоток статора двигателя;
Usa, Usb, Usc - значения формируемых фазных напряжений обмоток статора двигателя;
isa, isb, isc - токи обмоток статора электрической машины в трехфазной неподвижной системе координат a-b-c;
Isz, Ism - заданное предельное и действительное значения амплитуды тока статора двигателя;
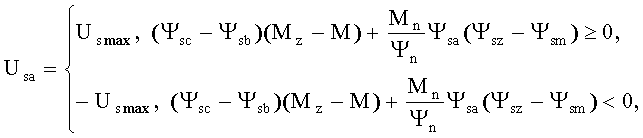
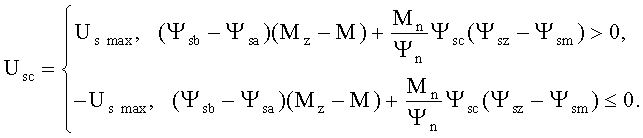
в противном случае вычисляют знаки выражений:



где Ψsa, Ψsb, Ψsc - потокосцепления фаз статора электродвигателя;
Ψn, Ψsz, Ψsm - номинальное, заданное и действительное значение амплитуды потокосцепления статора;
Mn, Mz, M - номинальное, заданное и действительное значения электромагнитного момента электродвигателя;
и формируют фазные напряжения на обмотках двигателя в соответствии со следующими условиями:

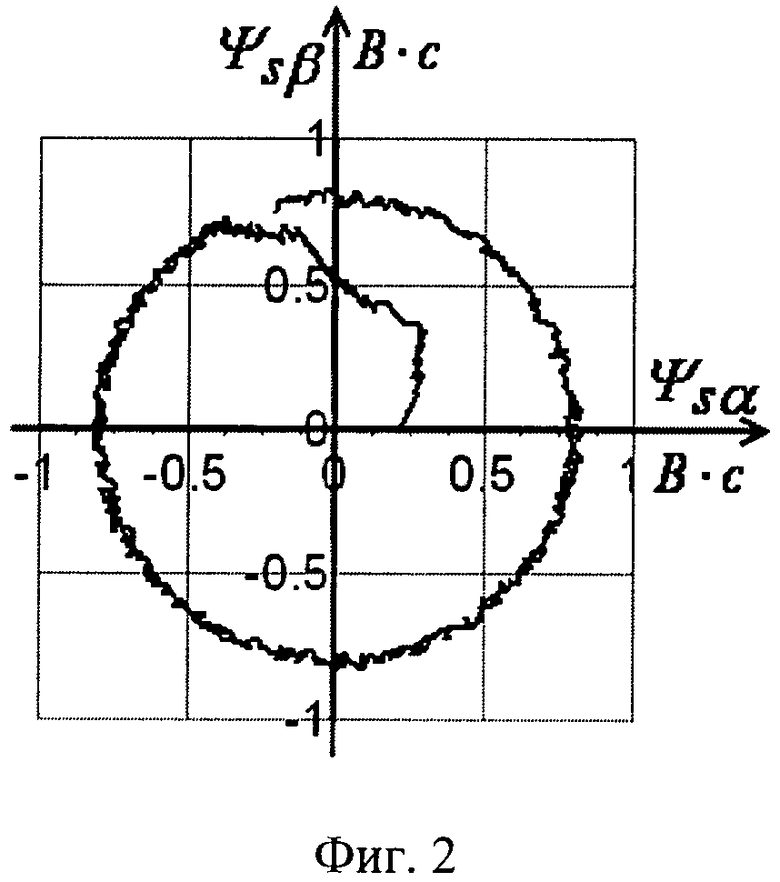
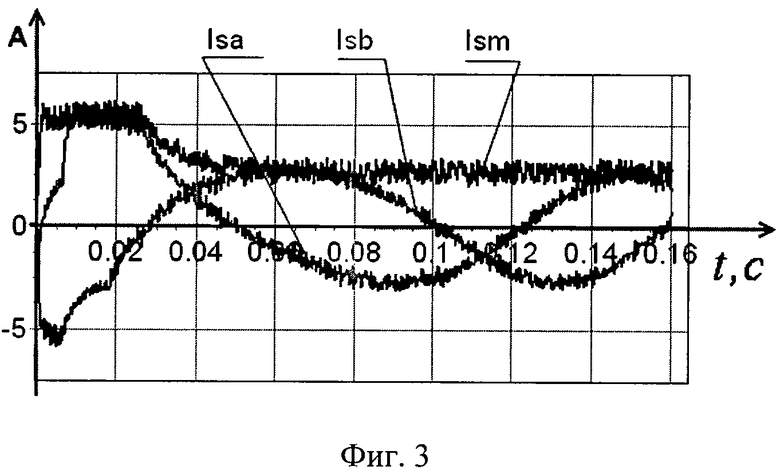
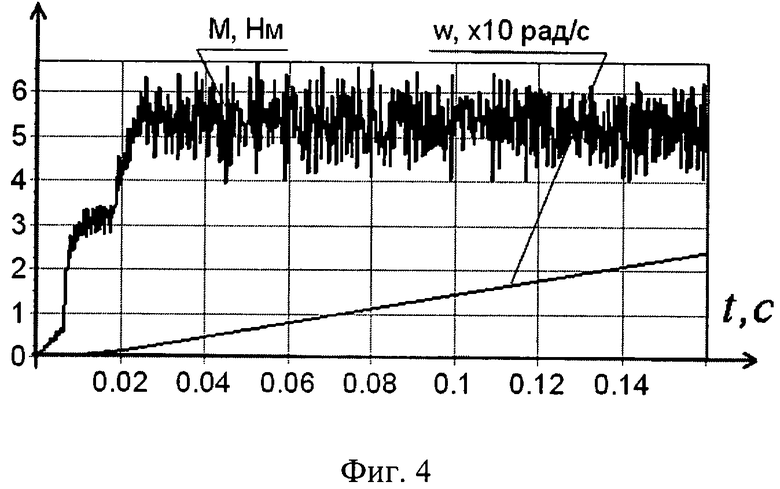
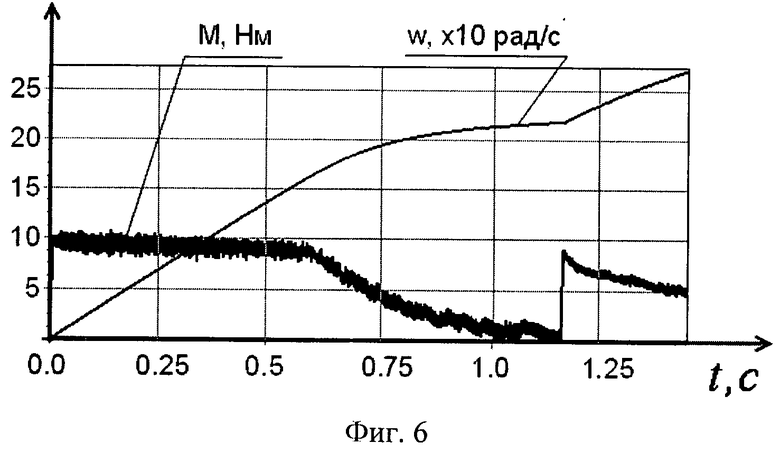
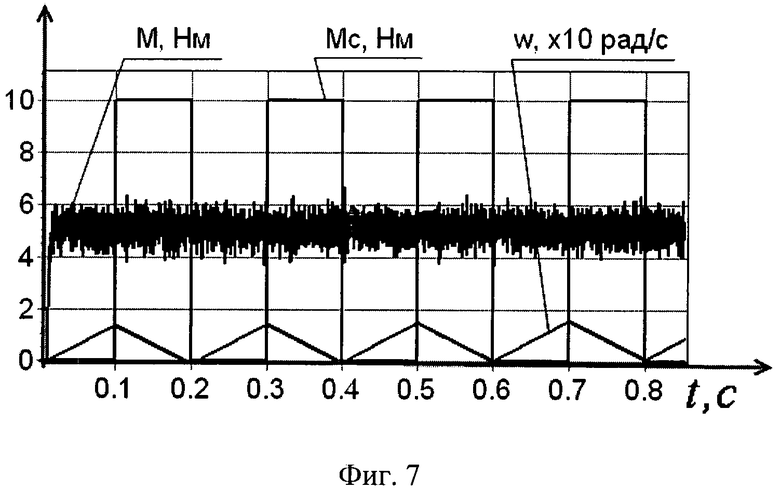
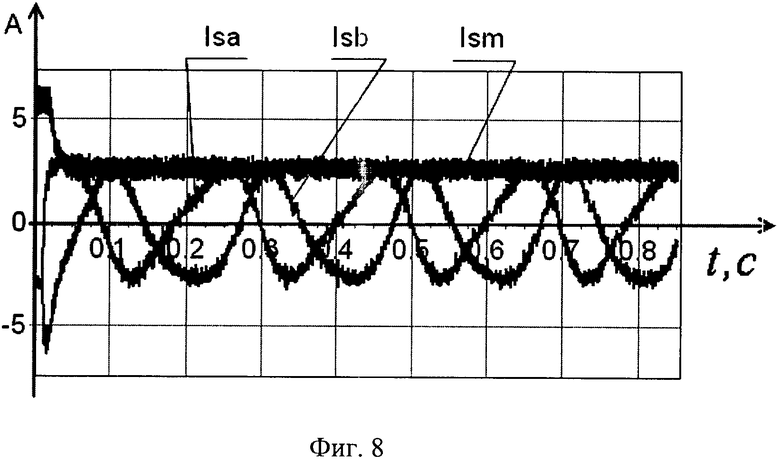
Изобретение поясняется чертежами, где на фиг.1 представлена структурная схема заявляемого способа управления, на фиг.2 показан годограф магнитного потока статора при пуске и работе без нагрузки, на фиг.3 показаны временные зависимости мгновенных значений и амплитуды фазных токов статора ЭМ при пуске и работе без нагрузки, на фиг.4 представлены временные зависимости электромагнитного момента и круговой частоты вращения ротора ЭМ при пуске и работе без нагрузки, на фиг.5 показан годограф вектора магнитного потока статора при работе с ослабленным магнитным потоком, на фиг.6 представлены временные зависимости электромагнитного момента и круговой частоты вращения ротора ЭМ при работе с ослабленным магнитным потоком, на фиг.7 показаны временные зависимости электромагнитного момента, момента сопротивления и круговой частоты вращения ротора ЭМ при ступенчатом изменении нагрузки на валу, на фиг.8 показаны временные зависимости мгновенных значений и амплитуды токов статора при ступенчатом изменении нагрузки на валу ЭМ.
Заявляемый способ реализуют следующим образом (фиг.1): задают значения электромагнитного момента ЭМ (Mz) и амплитуды потока статора (Ψsz); измеряют фазные токи isa, isb, isc и напряжение цепи постоянного тока АИН Udc при помощи датчика напряжения 1 и датчиков тока 2, 3, 4; вычисляют значения фазных напряжений ЭМ на основе измеренного значения напряжения цепи постоянного тока и логических сигналов переключения Sa, Sb, Sc мощных переключателей АИН 5, 6, 7; вычисляют на основе значений фазных напряжений и токов статора ЭМ значения фазных потоков статора Ψsa, Ψsb, Ψsc, значение амплитуды результирующего вектора потока статора Ψsm, значение электромагнитного момента М, а также действительное значение амплитуды тока статора (Ism) в наблюдателе состояния ЭМ 8; далее сравнивают заданное (Isz) и действительное значения амплитуды тока статора на сумматоре 9 и на блоке 10 (реализует функцию sign, то есть если сигнал на входе блока больше нуля, то на выходе устанавливается единица, в противном случае на выходе устанавливается нуль); если действительное значение тока статора не превышает заданное, то с выхода блока 10 поступает сигнал на включение переключателей 11, 12, 13, которые передают на выход значения с сумматоров 14, 15, 16; вычисляют значения выражений (Ψsa-Ψsc)(Mz-M) на сумматорах 17, 18 и перемножителе 19, (Ψsb-Ψsa)(Mz-M) - на сумматорах 17, 20 и перемножителе 21, (Ψsc-Ψsb)(Mz-M) - на сумматорах 17, 22 и перемножителе 23; вычисляют значения выражений kΨsb(Ψsz-Ψsm) на сумматоре 24, перемножителе 25 и усилителе 26, kΨsc(Ψsz-Ψsm) - на сумматоре 24, перемножителе 27 и усилителе 28, kΨsa(Ψsz-Ψsm) - на сумматоре 24, перемножителе 29 и усилителе 30, где k=Mn/Ψn - коэффициент усиления; на сумматорах 14, 15, 16 вычисляют выражения (Ψsc-Ψsb)(Mz-M)+kΨsb(Ψsz-Ψsm), (Ψsb-Ψsa)(Mz-M)+kΨsc(Ψsz-Ψsm), kΨsa(Ψsz-Ψsm)+(Ψsc-Ψsb)(Mz-M); вычисленные на предыдущем шаге выражения поступают через переключатели 11, 12, 13 на входы блоков 31, 32, 33, с выхода которых поступают сигналы (с единичным значением, если значения на сумматорах 14, 15, 16 больше нуля, или с нулевым значением в противном случае) на входы мощных переключателей 5, 6, 7; если действительное значение тока статора превышает заданное, то с выхода блока 10 поступает сигнал на отключение переключателей 11, 12, 13, которые передают на выход значения с перемножителей 34, 35, 36; затем вычисляют значения выражений isa(Isz-Ism) на сумматоре 9 и перемножителе 34, isb(Isz-Ism) - на сумматоре 9 и перемножителе 35, isc(Isz-Ism) - на сумматоре 9 и перемножителе 36, которые поступают через переключатели 11, 12, 13 на блоки 31, 32, 33, с выхода которых поступают сигналы (с единичным значением, если значения выражений больше нуля и с нулевым в противном случае) на входы мощных переключателей 5, 6, 7; при поступлении сигналов с единичным значением на управляющие входы мощных переключателей 5, 6, 7 происходит их коммутация, при которой на выходе переключателей будет положительный потенциал Udc; при поступлении сигналов с нулевым значением на управляющие входы мощных переключателей 5, 6, 7 на их выходе будет нулевой потенциал; под действием разности потенциалов по обмоткам ЭМ (37) протекает электрический ток, вызывающий изменение значений амплитуды потока статора и электромагнитного момента в заданном направлении.
Заявляемый способ управления электромагнитным моментом и магнитным потоком статора электрической машины переменного тока был проверен на вычислительной модели асинхронного электродвигателя 4A80A4Y3.
На фиг.2-4 представлены результаты моделирования электромеханических процессов асинхронного электродвигателя при реализации пуска без нагрузки, где заявляемый способ выполнили в следующей последовательности: вначале установили заданные значения электромагнитного момента, амплитуды потока статора и амплитуды тока статора на уровнях: Mz=5,5 Нм, Ψsz=0,8 Вс, Isz=5,5 А; затем измерили фазные токи (в первый момент времени isa=0, isb=0, isc=0) и напряжение шины постоянного тока (Udc=537 В); вычислили значения фазных напряжений статора ЭМ на основе значения Udc и сигналов состояния переключателей Sa, Sb, Sc (Usa=2/3Udc(Sa-Sb/2-Sc/2)=0, Usb=2/3Udc(Sb-Sa/2-Sc/2)=0, Usc=2/3Udc(Sc-Sa/2-Sb/2)=0); вычислили значения фазных потоков статора (в первый момент времени Ψsa=0, Ψsb=0, Ψsc=0), амплитуды результирующего вектора потока статора (в первый момент времени Wsm=0), электромагнитного момента (M=0), амплитуды тока статора (Ism=0); сравнили действительное и заданное значения амплитуды тока статора (Isz>Ism) и включили переключатели 11, 12, 13, через которые к блокам 31, 32, 33 передали сигналы с сумматоров 14, 15, 16 (в первый момент времени значения на выходе сумматоров равны нулю); вычислили сигналы на выходе блоков 25 (Sa=1), 26 (Sb=1), 27 (Sc=0); выполнили коммутацию переключателей 5, 6, 7 таким образом, что на выходы блоков 5 и 6 поступил положительный потенциал Udc, а на выход блока 7 - нулевой потенциал; под действием приложенных к обмотке статора ЭМ фазных напряжений (Usa=2/3Udc(Sa-Sb/2-Sc/2)=179 В, Usb=2/3Udc(Sb-Sa/2-Sc/2)=179 В, Usc=2/3Udc(Sc-Sa/2-Sb/2)=-358 В) начал протекать электрический ток (фиг.3), вызвавший изменения потока статора (фиг.2) и электромагнитного момента (фиг.4); указанные действия повторяли с частотой 5000 Гц в течение времени 0,16 с.
На фиг.2 представлен годограф вектора потока статора, из которого видно, что амплитуда вектора потока статора с нулевого значения изменилась до заданного и поддерживалась на заданном уровне (Ψsz=0,8 Bс) в течение времени процесса моделирования. В результате применения заявляемого способа сталь ЭМ не была насыщена или размагничена, так как амплитуда потока поддерживалась на заданном (номинальном) уровне, что значительно повысило надежность электропривода.
На фиг.4 представлены временные зависимости электромагнитного момента (М) и частоты вращения ротора (w) ЭМ, по которым можно сказать, что электромагнитный момент был изменен с нулевого до заданного значения (Mz=5,5 Нм) и поддерживался на заданном уровне в течение всего времени моделирования. О быстродействии контуров регулирования электромагнитного момента и магнитного потока статора можно судить по временам нарастания электромагнитного момента до значения 0,8Mn (0,022 с) и потока до значения Ψn (0,018 с).
На фиг.3 видно, что заявляемый способ помимо хороших динамических показателей обладает возможностью жесткого ограничения амплитуды тока статора на заданном уровне (5,5 А), что в динамических режимах работы позволяет избежать бросков тока и тем самым повысить надежность электропривода.
Заявляемый способ управления электромагнитным моментом и магнитным потоком электрической машины переменного тока также позволяет работать при частоте вращения ротора, превышающей номинальную. Для реализации данного режима выполнен вычислительный эксперимент (фиг.5, 6), в котором использована следующая последовательность действий: вначале выполнили последовательность действий, описанную в предыдущем вычислительном эксперименте; затем в момент времени 1,1 с, когда ЭМ достигла предельной частоты вращения, возможной при данных значениях амплитуды напряжения и электромагнитного момента, уменьшили заданное значение амплитуды потока статора со значения 0,8 Вс до значения 0,6 Вс в результате амплитуда вектора потока статора изменилась и достигла заданного значения (на фиг.5 представлен годограф вектора потока статора), что привело к дальнейшему росту частоты вращения ротора ЭМ (фиг.6). Описанный вычислительный эксперимент подтверждает высокую надежность заявляемого способа управления во всем диапазоне частот вращения ротора ЭМ.
Исследование динамических характеристик заявляемого способа управления при работе электропривода под нагрузкой (фиг.7, 8), имеющей резкоизменяющийся характер, выполнено в ходе следующего вычислительного эксперимента: вначале выполнили последовательность действий, описанную в первом вычислительном эксперименте; затем подали резкоизменяющийся момент сопротивления Mc с максимальным значением 2Mn и минимальным - 0 с периодом 0,2 с на вал ЭМ (фиг.7); при появлении максимального значения момента сопротивления на валу ЭМ частота вращения ЭМ уменьшалась, так как на валу ЭМ поддерживали электромагнитный момент на заданном уровне в соответствии с заявляемым изобретением; при появлении на валу ЭМ минимального значения момента сопротивления частота вращения ЭМ увеличивалась, так как значение электромагнитного момента ЭМ поддерживалось на заданном уровне, превышающем минимальное значение момента сопротивления.
На фиг.7 видно, что при использовании заявляемого способа управления электромагнитным момент не зависит от нагрузки и изменяется в соответствии с заданным значением (Mz), что позволяет свободно реализовывать различные алгоритмы управления и защиты механической части электропривода в аварийных режимах и режимах работы с резкоизменяющимся тяжелым характером нагрузки.
На фиг.8 видно, что характер нагрузки не оказывает влияния на амплитуду тока статора (Ism не превышает предельного заданного значения), что способствует исключению аварийных режимов работы электропривода, связанных с перегревом электрических приборов АИН и самой ЭМ.
В заявляемом способе введение канала регулирования амплитуды потокосцепления статора и канала ограничения тока статора позволяет ограничить пусковые токи электродвигателя, повысить надежность системы управления в зоне ослабления поля при высоком быстродействии контура регулирования электромагнитного момента.
Заявляемый способ управления моментом и магнитным потоком электрической машины переменного тока позволяет: улучшить эксплуатационные характеристики электродвигателя, инвертора и электропривода в целом; повысить надежность системы управления и электродвигателя за счет ограничения амплитуды токов обмотки статора ЭМ, а также поддержания амплитуды магнитного потока статора на заданном уровне.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2011 |
|
RU2476982C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕЛИЧИНОЙ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2008 |
|
RU2395157C2 |
| СПОСОБ ВЕКТОРНОЙ ОРИЕНТАЦИИ ТОКА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ ЭНЕРГИИ И УСТРОЙСТВО ВЕКТОРНОЙ ОРИЕНТАЦИИ ("ВЕКТОРИНГ") ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1998 |
|
RU2141720C1 |
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| СПОСОБ ОПТИМАЛЬНОГО ВЕКТОРНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402147C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |
| Способ управления асинхронным электродвигателем и устройство для его осуществления | 1981 |
|
SU1443110A1 |
| Электропривод переменного тока | 1984 |
|
SU1515322A1 |

Изобретение относится к области электротехники, а именно к способам управления электромагнитным моментом и амплитудой потокосцепления статора электрической машины переменного тока, получающей питание от автономного инвертора напряжения со стороны статора. Техническим результатом является снижение динамических нагрузок в передаточном устройстве электропривода, ограничение потребляемых электродвигателем токов, увеличение надежности системы управления электроприводом. В способе управления электромагнитным моментом и магнитным потоком электрической машины переменного тока сначала устанавливают заданное значение электромагнитного момента, заданное значение амплитуды потокосцепления статора, заданное значение предельного тока статора и определяют мгновенные значения токов и потокосцеплений фаз статора и мгновенное значение электромагнитного момента. Затем вычисляют и формируют фазные напряжения статора. 8 ил.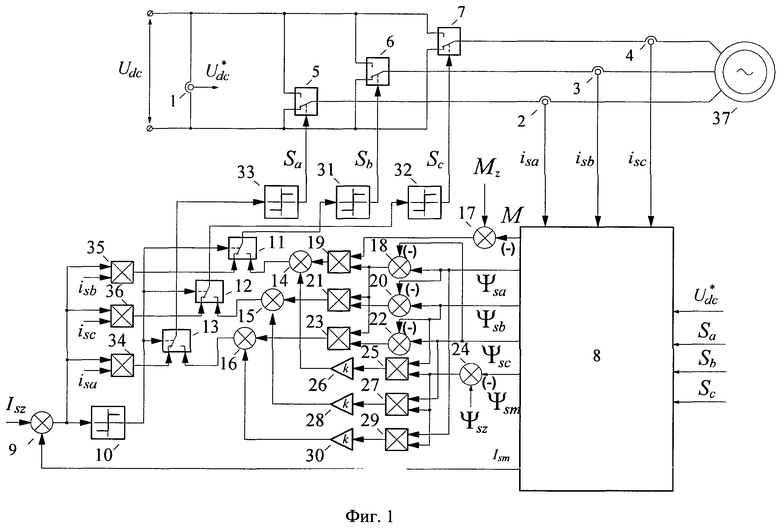
Способ управления электромагнитным моментом и магнитным потоком электрической машины переменного тока, включающий установку заданного значения электромагнитного момента, установку заданного значения амплитуды потокосцепления статора, установку предельного значения тока статора, измерение и вычисление значений фазных токов и напряжений обмоток статора машины для определения мгновенных значений электромагнитного момента и потокосцеплений статора, отличающийся тем, что измеряют значение амплитуды тока статора, сравнивают его с заданным предельным значением, и если амплитуда тока статора превышает предельное значение, то управляющие воздействия формируют следующим образом:
где Us max - максимально допустимое значение фазного напряжения обмоток статора двигателя;
Usa, Usb, Usc - значения формируемых фазных напряжений обмоток статора двигателя;
isa, isb, isc - токи обмоток статора электрической машины в трехфазной неподвижной системе координат а-b-с;
Isz, Ism - заданное предельное и действительное значения амплитуды тока статора двигателя;
в противном случае вычисляют знаки выражений:
где Ψsa, Ψsb, Ψsc - потокосцепления фаз статора электродвигателя;
Ψn, Ψsz, Ψsm - номинальное, заданное и действительное значение амплитуды потокосцепления статора;
Mn, Mz, М - номинальное, заданное и действительное значения электромагнитного момента электродвигателя;
и формируют фазные напряжения на обмотках двигателя в соответствии со следующими условиями:
| СПОСОБ УПРАВЛЕНИЯ ВЕЛИЧИНОЙ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2008 |
|
RU2395157C2 |
| Паросушитель для паровозного котла | 1955 |
|
SU102160A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ АСИНХРОННОГО ДВИГАТЕЛЯ | 2005 |
|
RU2306666C1 |
| СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2390091C1 |
| Способ управления асинхронным электроприводом и устройство для его осуществления | 1984 |
|
SU1458962A1 |
| US 4678248 A, 07.07.1987 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ ФИЛЬТРУЮЩЕГО МАТЕРИАЛА | 1993 |
|
RU2040371C1 |

