Область техники
Настоящее изобретение относится к области электротехники, в частности к оптимальному регулированию электромагнитного момента в электроприводе на базе асинхронного двигателя с короткозамкнутым ротором с применением полеориентированного векторного управления и может быть применено в подобных электромеханических системах.
Уровень техники
Сегодня электропривод на базе асинхронной машины (AM) с применением принципа векторного управления при ориентации по вектору потокосцепления ротора, также известное как полеориентированное векторное управление (ПВУ), получил широкое применение в различных электромеханических установках с высокими требованиями к показателям регулирования в статических и динамических режимах работы.
Алгоритм ПВУ предполагает разделение вектора тока статора I на две составляющие - потокообразующую Id и моментообразующую Iq, которые являются проекциями данного вектора на оси вращающейся ортогональной системы координат d,q, ориентированной по вектору потокосцепления ротора. Раздельное регулирование данных составляющих тока статора позволяет раздельно регулировать магнитный поток и электромагнитный момент машины. Более подробно принцип ПВУ на сегодняшний день подробно описан как в отечественной, так и зарубежной литературе, например в [1, 2, 3, 4].
В то же время достаточно часто в электроприводе предъявляются высокие требования к энергетическим показателям, а именно - к КПД, что означает минимизацию потребляемой мощности, или статорного тока машины. Для этого структура (алгоритм) ПВУ дополняется блоками формирования оптимальных зависимостей заданного потокообразующего тока или потокосцепления ротора от заданного электромагнитного момента. Наиболее часто такая зависимость реализуется в виде аналитической или табличной функции.
Раскрытие изобретения
Технический результат, на достижение которого направлено предлагаемое техническое решение, заключается в повышении эффективности работы электрической машины посредством применения заявленного способа регулирования.
Заявленный технический результат достигается путем создания способа оптимизации работы асинхронной машины по минимуму статорного тока и максимуму КПД при полеориентированном векторном управлении, заключающийся в том, что осуществляют поочередное задание разных соотношений потокообразующего и моментообразующего тока статора Id, Iq, формирующих один и тот же крутящий момент на валу, и вычислении на каждом шаге величины тока и КПД, с целью проверки достижения экстремума по минимальному току и максимальному КПД за счет отслеживания монотонности убывания функции I(Id) и возрастания функции η(Id).
Механизм реализации заявленного способа заключается в следующем. Уравнение крутящего электромагнитного момента асинхронного двигателя при математическом описании в системе координат d,q имеет вид:

где Id, Iq - потокообразующая и моментообразующая составляющие тока статора по осям d и q соответственно; ψr - модуль вектора потокосцепления (далее - потокосцепление) ротора; Lm - взаимная индуктивность статора и ротора; Tr=Lr/Rr - постоянная времени ротора; Lr=Lrσ+Lm - полная индуктивность ротора;
Lrσ - индуктивность рассеяния ротора; Rr - активное сопротивление ротора; zp - число пар полюсов; ω - механическая угловая частота вращения ротора.
В статическом режиме уравнение (1) преобразуется к следующему виду:

Если в приведенном уравнении все множители правой части кроме токов принять константами, то можно сказать, что электромагнитный момент может быть сформирован различными комбинациями токов Id и Iq.
Из уравнения электромагнитного момента видно, что он может быть сформирован разными величинами токов Id, Iq. В литературе показано, что с теоретической точки зрения добиться оптимальности по току возможно в том случае, если формировать момент из таких соотношений токов по осям d,q:

а для оптимальности по КПД используется следующее соотношение:

где Rs - активное сопротивление статора.
Однако соотношения (3) и (4) являются сугубо теоретическими и не учитывают важных факторов, наиболее весомым из которых является насыщение магнитной системы, т.е. варьирование взаимной индуктивности статора и ротора Lm в зависимости от потокосцепления. Это обуславливает тот факт, что применение на практике выше приведенных зависимостей не обеспечит оптимальности работы AM как по току, так и по КПД.
В настоящей заявке предлагается пошаговый способ определения оптимальных зависимостей, основанный на поочередном задании разных соотношений токов Id, Iq, формирующих один и тот же крутящий момент на валу, и вычислении на каждом шаге величины тока и КПД с целью выявления их минимума (для тока) и максимума (для КПД).
Аппаратный инструментарий
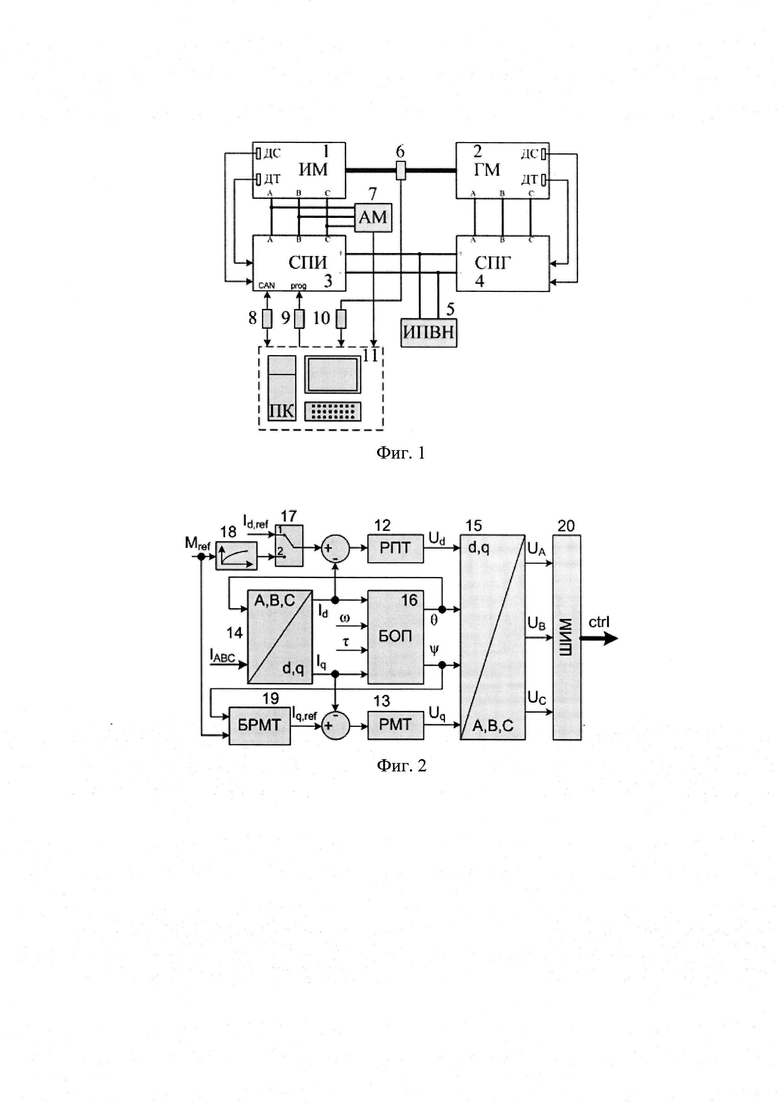
Предлагаемая функциональная схема установки для проведения процедуры автоматизированного поиска оптимальных зависимостей показана на Фиг. 1.
Ниже приведено описание элементов, входящих в состав предлагаемой установки.
Блок 1. Исследуемая машина (ИМ) асинхронная с короткозамкнутым ротором с измерительными датчиками скорости и температуры обмоток (ДС, ДТ).
Блок 2. Гонная машина (ГМ) с датчиками скорости и температуры (ДС, ДТ). При необходимости, устанавливается система охлаждения обмоток ГМ.
Блок 3. Силовой преобразователь исследуемой машины (СПИ). Силовые модули СПИ управляются посредством контроллера. Датчики фазных токов (ДФТ) и датчик напряжения ЗПТ (ДН) обычно вмонтированы внутри блока СПИ.
Блок 4. Силовой преобразователь тонной машины (СПГ).
Блок 5. Источник постоянного высоковольтного напряжения (ИПВН) для питания звена постоянного тока (ЗПТ).
Блок 6. Датчик крутящего момента (ДКМ) на общем механическом валу ИМ и ГМ.
Блок 7. Анализатор мощности, позволяющий измерять на зажимах статора трехфазные токи, напряжения и электрическую мощность исследуемой машины.
Блок 8. Декодер, преобразующий измеренный сигнал электромагнитного момента из аналогового типа в цифровой тип.
Блок 9. Программатор (JTAG эмулятор) для прошивки контроллера. Авторы настоящей заявки используют JTAG-эмулятор производства компании "Sauris".
Блок 10. Переходник USB-CAN для обмена данными между ПК и контроллером.
Блок 11. Персональный компьютер (ПК).
Программный инструментарий
Основным программным средством, необходимым для проведения процедуры, является алгоритм векторного управления, закладываемый в управляющий контроллер исследуемой асинхронной машины. Данный алгоритм можно представить в виде структурной схемы (Фиг. 2), и включает такие блоки:
Блоки 12, 13. Пропорционально-интегральные регуляторы потокообразующего Id и моментообразующего Iq токов (РПТ, РМТ);
Блоки 14, 15. Преобразователи координат A,B,C-d,q, d,q-A,B,C (из трехфазной неподвижной системы координат в двухфазную ортогональную вращающуюся, и наоборот);
Блок 16. Блок определения модуля и угла поворота вектора потокосцепления ротора (БОП). Структура данного блока основана на уравнениях роторной цепи, куда входят такие параметры как постоянная времени ротора Tr и взаимная индуктивность Lm. В данном контексте следует отметить важность точной информации о данных параметрах, поскольку они будут определять точность ориентации системы координат d,q по вектору потокосцепления ротора. На сегодняшний день существует большое количество методов идентификации (оценки) параметров асинхронной машины, служащих для улучшения качества регулирования момента и скорости, которые описаны в отечественных и зарубежных научных источниках;
Блок 17. Переключатель источника задания потокообразующего тока;
Блок 18. Формирователь задания потокообразующего тока в функции заданного момента
Блок 19. Формирователь задания моментообразующего тока в функции заданного момента
Блок 20. Широтно-импульсная модуляция (ШИМ).
Описание алгоритма
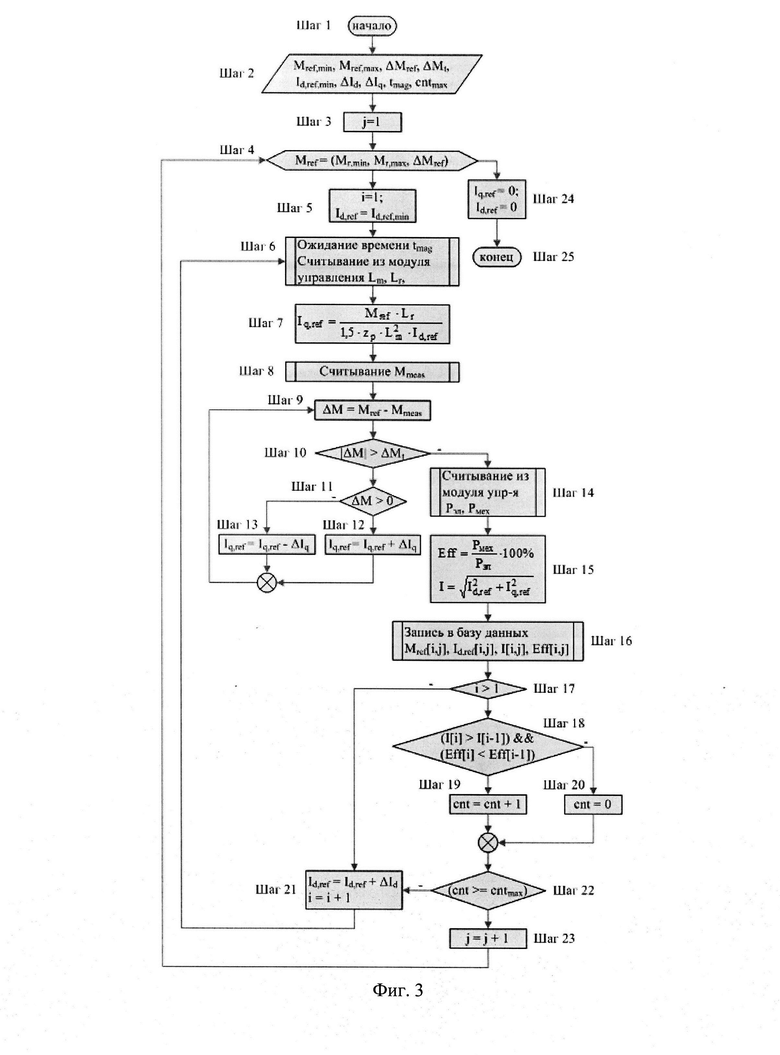
Последовательность действий, выполняемых с целью оптимизации работы асинхронной машины, описывается алгоритмом, блок-схема которого приведена на фиг. 3. Такая последовательность действий может выполняться вручную, либо приведенный алгоритм может быть заложен в основу работы программы автоматизированного поиска оптимальных зависимостей.
Шаг 1. Начало процедуры (точка входа);
Шаг 2. Задаются исходные данные, т.е. следующие величины:
- Диапазон изменения заданного момента (Mref,min…Mref,max) с шагом ΔMref;
- Допустимое отклонение между заданным и измеренным моментом ΔMt, которое не должно превышать 1% от текущего значения момента;
- Минимальное значение потокообразующей составляющей тока Id,ref,min, и шаг его изменения ΔId,ref;
- Шаг изменения моментообразующей составляющей тока ΔIq,ref;
Шаг 3. Счетчику j присваивается значение 1.
Шаг 4. Заданному моменту присваивается начальное (на первом шаге цикла) или очередное (на всех последующих шагах) значение из диапазона его изменения;
Шаг 5. Устанавливается нулевое значение счетчика cnt=0. Задается начальное значение Id,ref в соответствие с вышеперечисленными рекомендациями, а счетчику i присваивается значение 1;
Шаг 6. Выполняется ожидание времени намагничивания tmag=3…5Tr, определяемое переходным процессом магнитной цепи; Из модуля управления считываются величины Lm, Lr.
Шаг 7. Из формулы момента для статического режима работы рассчитывается значение Iq;ref, по выражению:

Шаг 8. Измеряется момент на валу машины и присваивается переменной Mmeas; считываются электрическая и механическая мощности.
Шаг 9. Вычисляется ошибка отработки момента по выражению:

Шаг 10. Полученное отклонение сравнивается с допустимым значением, т.е. проверяется условие |ΔМ|>ΔMt;
Шаг 11. Проверяется отклонение в положительную или отрицательную сторону величины ошибки отклонения, т.е. проверяется условие ΔM>0;
Шаг 12. Если условие п. 11 выполняется, то заданному моментообразующему току дается положительное приращение Iq,ref=Iq,ref+ΔIq,ref;
Шаг 13. Если условие п. 11 не выполняется, то заданному моментообразующему току дается отрицательное приращение Iq,ref=Iq,ref- ΔIq,ref;
Шаг 14. Если условие п. 10 не выполняется, из модуля управления считываются значения электрической Рэл и механической Рмех мощностей машины;
Шаг 15. Рассчитываются КПД по формуле (7)

и модуль тока статора по формуле (8)

Шаг 16. В базу данных записываются текущие значения заданного момента, заданного тока по оси d, модуля тока статора и КПД.
Шаг 17. Проверяется условие i>1. Таким образом, выполняется проверка нахождения в первой точке заданного тока оси d.
Шаг 18. Если условие п. 17 выполняется, проверяется достижение экстремума по току (минимум) и КПД (максимум) за счет отслеживания монотонности убывания функции I(Id) и возрастания функции η(Id). Если оба эти условия выполнены, то поиск экстремума прекращается. Реализуется это за счет проверки для тока и КПД (всех точек кроме первой) условия Ii>Ii-1, ηi<ηi-1.
Шаг 19. Если условие на шаге 18 выполняется (ветка «ДА»), то выполняется действие cnt=cnt+1.
Шаг 20. Если условие на шаге 18 не выполняется (ветка «НЕТ»), то выполняется действие cnt=0.
Примечание. Здесь переменная cnt является счетчиком для совместной проверки монотонности возрастания функции I(Id) и убывания функции η(Id). Критерием успешного выполнения точки оптимума и как следствие завершение выполнения цикла алгоритма на каждом шаге итерации является факт того, что экстремумы кривых тока и КПД были достигнуты.
Шаг 21. Если условие п. 17 не выполняется, то заданный потокообразующий ток Id,rref инкрементируется на величину ΔId, после чего происходит возврат к шагу 6.
Шаг 22. Проверяется условие (cnt>=cntmax), в случае его не выполнения происходит переход к п. 21.
Шаг 23. В случае выполнения условия п. 22 счетчику j дается единичное приращение, поиск в точке с текущим заданным моментом прекращается и задается следующее из диапазона значение Mref, после чего процедура повторяется, начиная с шага 5.
Шаг 24. По выходу из последней точки цикла (п. 4) заданные токи по осям d и q обнуляются.
Шаг 25. Окончание процедуры (точка выхода);
Рекомендации к выполнению процедуры оптимизации
Вначале следует выбрать минимальное значение потокообразующего тока Id,min и его приращение ΔId. Здесь следует исходить из величины суммарного статорного тока, необходимого для формирования требуемого электромагнитного момента. Как правило, значение потокообразующего тока Id соответствует значению, равному не менее чем 0,5⋅I. Тогда минимальное значение моментообразующей составляющей будет равно 
Приращение ΔId следует выбирать компромиссно, исходя из достаточного количества точек для получения кривых КПД и тока в зависимости от тока Id, и в то же время, исходя из быстроты выполнения процедуры поиска экстремума. Рекомендуется выбирать приращение, равное 1-2% от номинального тока статора машины.
Список используемых источников информации:
1. Козярук А.Е. Современное и перспективное алгоритмическое обеспечение частотно-регулируемых электроприводов / А.Е. Козярук, В.В. Рудаков. - СПб.: Санкт-Петербургская Электротехническая компания, 2004. - 127 с.
2. Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием: учеб. для вузов. - М.: Академия, 2006. - 272 с.
3. Шрейнер Р.Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. -Екатеринбург, Уральское отделение РАН, 2000. - 654 с.
4. Виноградов А.Б. Векторное управление электроприводами переменного тока / ГОУВПО «Ивановский государственный энергетический университет имени В.И. Ленина». Иваново, 2008. - 320 с.
Изобретение относится к области электротехники. Технический результат заключается в повышении эффективности работы электрической машины. Способ оптимизации работы асинхронной машины по минимуму статорного тока и максимуму КПД при полеориентированном векторном управлении заключается в поочередном задании разных соотношений потокообразующего и моментообразующего токов статора Id, Iq, формирующих один и тот же крутящий момент на валу, и вычислении на каждом шаге величины тока и КПД с целью проверки достижения экстремума по минимальному току и максимальному КПД за счет отслеживания монотонности убывания функции I(Id) и возрастания функции η(Id). 3 ил.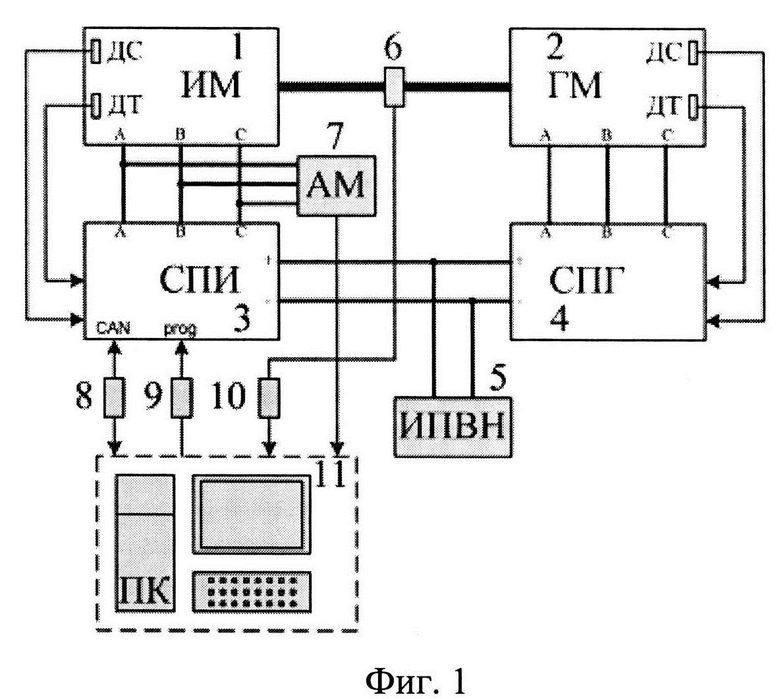
Способ оптимизации работы асинхронной машины по минимуму статорного тока и максимуму КПД при полеориентированном векторном управлении, заключающийся в том, что осуществляют поочередное задание разных соотношений потокообразующего и моментообразующего токов статора Id, Iq, формирующих один и тот же крутящий момент на валу, и вычислении на каждом шаге величины тока и КПД с целью проверки достижения экстремума по минимальному току и максимальному КПД за счет отслеживания монотонности убывания функции I(Id) и возрастания функции η(Id).
| СПОСОБ ФОРМИРОВАНИЯ ПОТОКОСЦЕПЛЕНИЯ РОТОРА АСИНХРОННОГО ДВИГАТЕЛЯ В СОСТАВЕ ЭЛЕКТРОПРИВОДА С ВЕКТОРНЫМ ПОЛЕОРИЕНТИРОВАННЫМ УПРАВЛЕНИЕМ ПРИ РАБОТЕ В ЗОНЕ ОГРАНИЧЕННОГО НАПРЯЖЕНИЯ | 2021 |
|
RU2759558C1 |
| Магнитострикционный вибратор | 1950 |
|
SU100688A1 |
| СПОСОБ ОПТИМАЛЬНОГО ВЕКТОРНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402147C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2422979C1 |
| CN 102832874 A, 19.12.2012. | |||
