Изобретение относится к области электротехники, а именно к способам управления величиной электромагнитного момента электрической машины переменного тока (ЭМ), получающей питание от автономного инвертора напряжения (АИН) со стороны статора или со стороны ротора для электрической машины двойного питания (ЭМДП).
Известны способы управления величиной электромагнитного момента электрической машины переменного тока, рассмотренные, например, в работе (Бичай В.Г., Пиза Д.М., Потапенко Е.Е., Потапенко Е.М. Состояние, тенденции и проблемы в области методов управления асинхронными двигателями / Радioелектронiка, iнформатика, управлiння, №1, 2001. С.138-144), а также [Kerkman Russel. J., Skibinski Gary L. and Schlegel David W. AC Drives: Year 2000 (Y2K) and Beyond // IEEE - APEC'99, March 14-18, 1999].
Из этих обзоров следует, что наиболее распространенным вариантом управления электромагнитным моментом ЭМ являются т.н. системы векторного управления. Однако их недостатком является большой объем вычислений при прямом и обратном взаимном преобразовании неподвижной и вращающейся систем координат, необходимость осуществления специальных мероприятий по идентификации параметров ЭМ для повышения качества управления, а также наличие запаздывания в формировании электромагнитного момента.
Наиболее близким по технической сущности к заявляемому является способ управления электромагнитным моментом, предложенный М.Дипенброком (Patent Number 4,678,248 United States. Int. CI.4 H02P 7/36. Direct self-control of the flux and rotary moment of a rotary-field machine / Depenbrock Manfred. Assignee: Brown, Boveri & Cie AG, Mannheim, Fed. Rep. of Germany. Foreign Application Priority Data Oct. 20, 1984. Date of Patent: Jul.7, 1987). Этот способ известен как Direct Torque Control (DTC) - прямое управление моментом и впервые реализован концерном ABB (Technical Guide No.1 - Direct Torque Control - the world's most advanced AC drive technology. ABB Industry Drives, 1999). Указанный способ включает установку заданных значений электромагнитного момента и потокосцепления статора, измерение и вычисление значений фазных токов и напряжений обмоток статора машины для определения мгновенных значений электромагнитного момента и потокосцеплений статора, последующее определение заданных значений напряжений в каждой фазе статора и управление электромагнитным моментом ЭМ путем изменения напряжений в каждой фазе.
Управление величиной электромагнитного момента в соответствии со способом DTC также изложено, например, в книгах (Усольцев А.А. Частотное управление асинхронными двигателями / - СПб.: СПбГУ ИТМО, 2006, - 94 с.), (Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием / - М.: Издательский центр «Академия», 2006. - 272 с.).
Недостатком указанного способа является необходимость реализации в системе управления канала регулирования потокосцепления статора, что снижает качество управления электромагнитным моментом за счет распространения ошибки регулирования по этому каналу и усложняет структуру системы управления (Д.Мак-Кракен, У.Дорн. Численные методы и программирование на ФОРТРАНЕ. - М.: Мир, 1997 - 584 с. Раздел 2.6 Распространение ошибок).
Для ЭМДП наиболее близким по технической сущности к заявляемому является способ управления электромагнитным моментом, описанный в работе (Bonnet F., Vidal P.E. and Pietrzak-David М. Direct torque control of doubly fed induction machine // Bulletin of the polish academy of sciences. Technical Sciences. Vol.54, No.3, 2006, c.307-314). Указанный способ включает установку заданных значений электромагнитного момента и потокосцепления статора и ротора, измерение и вычисление значений фазных токов и напряжений обмоток статора и ротора машины для определения мгновенных значений электромагнитного момента и потокосцеплений статора и ротора, последующее определение заданных значений напряжений в каждой фазе статора и ротора и управление электромагнитным моментом ЭМ путем изменения этих напряжений.
Недостатком указанного способа является необходимость реализации в системе управления каналов регулирования потокосцепления статора и потокосцепления ротора, что снижает качество управления электромагнитным моментом ЭМДП за счет распространения ошибки регулирования по этим каналам и усложняет структуру системы управления.
Целью изобретения является повышение качества управления величиной электромагнитного момента ЭМ и ЭМДП при работе с высокодинамичной нагрузкой в режимах пуска, торможения и основном эксплуатационном режиме при одновременном упрощении структуры системы управления за счет нового способа формирования мгновенных значений напряжений статора ЭМ и ротора ЭМДП.
Техническим результатом изобретения является снижение динамических нагрузок в передаточном устройстве электропривода, улучшение эксплуатационных характеристик двигателя и повышение надежности электропривода.
Указанный технический результат достигается тем, что в предлагаемом способе управления величиной электромагнитного момента ЭМ, включающем установку заданного значения электромагнитного момента, измерение и вычисление значений фазных токов и напряжений обмоток статора машины для определения мгновенных значений электромагнитного момента и потокосцеплений статора, согласно изобретению определяют знаки выражений
(ψSc-ψSb)(MZ-M);
(ψSa-ψSc)(MZ-M);
(ψSb-ψSa)(MZ-M);
где ψSa, ψSb, ψSc - потокосцепления обмоток статора электрической машины в трехфазной неподвижной системы координат а-b-с;
MZ, M - заданное и действительное значение электромагнитного момента двигателя;
и формируют фазные напряжения на обмотках статора двигателя в соответствии со следующими условиями:



где USamax, USbmax, UScmax - максимально-допустимые значения фазных напряжений обмоток статора двигателя;
USa, USb, USc - значения формируемых фазных напряжений обмоток статора двигателя.
Указанный технический результат для электропривода с ЭМДП достигается тем, что в заявляемом способе управления величиной электромагнитного момента, включающем установку заданного значения электромагнитного момента, измерение и вычисление значений фазных токов и напряжений обмоток ротора машины для определения мгновенных значений электромагнитного момента и потокосцеплений ротора, согласно изобретению определяют знаки выражений
(ψry-ψrz)(MZ-M);
(ψrz-ψrx)(MZ-M);
(ψrx-ψry)(MZ-M),
где ψrх, ψry, ψrz - потокосцепления обмоток ротора двигателя в трехфазной системе координат x-y-z, неподвижной относительно ротора;
MZ, M - заданное и действительное значение электромагнитного момента двигателя;
и формируют фазные напряжения на обмотках ротора ЭМДП в соответствии со следующими условиями:



где Urxmax, Urymax, Urzmax - максимально-допустимые значения фазных напряжений обмоток ротора двигателя;
Urx, Ury, Urz - значения формируемых фазных напряжений обмоток ротора двигателя.
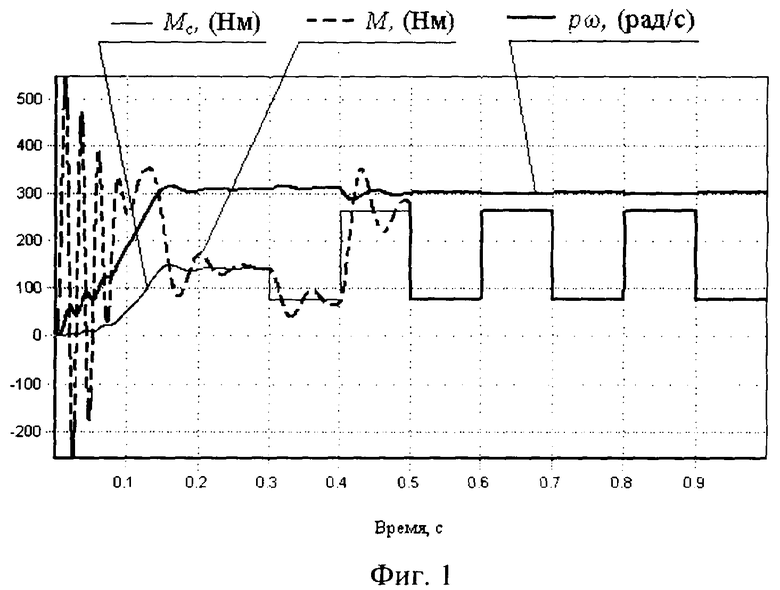
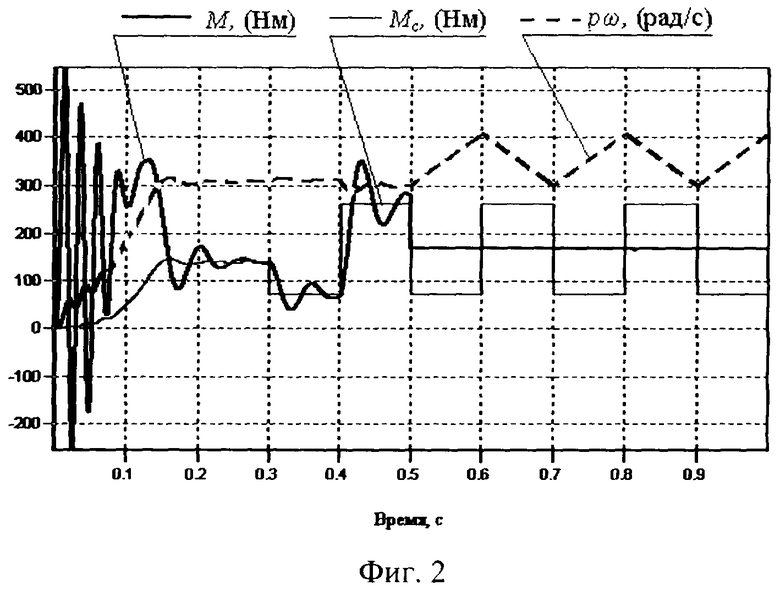
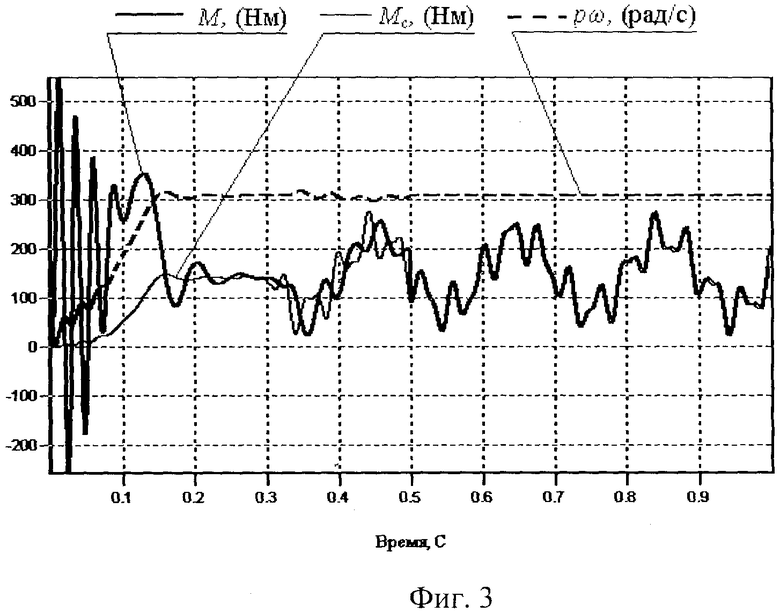
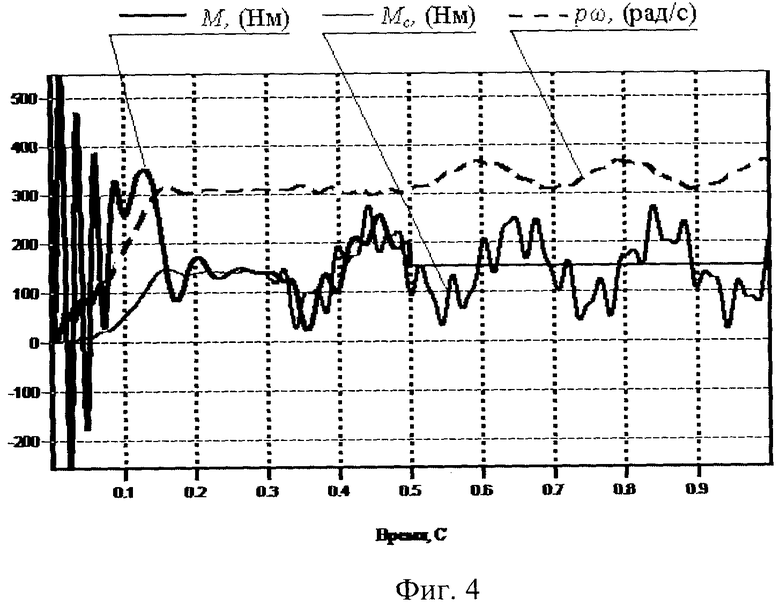
Заявляемое изобретение поясняется чертежами, где на фиг.1, фиг.2, фиг.3 и фиг.4 показаны временные зависимости электромагнитного момента двигателя М, момента сопротивления Мс, электрической частоты вращения ротора двигателя рω при реализации режима пуска ЭМ при изменяющемся по квадратичному закону моменте сопротивления Mс=βω2, последующей подаче нагрузки в момент времени 0,3 с и последующем включении управления электромагнитным моментом по заявляемому способу; на фиг.5 и фиг.6 представлены структурные схемы некоторых возможных технических реализаций предлагаемого способа для ЭМ и ЭМДП.
В заявляемом способе исключение каналов регулирования потокосцепления статора и ротора позволяет повысить качество управления величиной электромагнитного момента ЭМ и ЭМДП при работе с высокодинамичной нагрузкой в режимах пуска, торможения и основном эксплуатационном режиме при одновременном упрощении структуры системы управления за счет нового способа формирования мгновенных значений напряжений статора ЭМ и ротора ЭМДП.
На фиг.2 и фиг.4 показано, что при работе в неуправляемом режиме (до момента времени 0,5 с) при подаче резко-переменного момента сопротивления MC в момент времени 0,3 с колебания электромагнитного момента М ЭМ и ЭМДП достигают значения, превышающего номинальное значение электромагнитного момента. Это в свою очередь вызывает значительные динамические нагрузки в передаточном устройстве электропривода (редукторе, цепи транспортера и т.д.) и электродвигателе. В момент времени 0,5 с электромагнитный момент ЭМ и ЭМДП поддерживают в соответствии с заявляемым способом на заданном уровне. Поддержание электромагнитного момента в соответствии с заданным значением с высокой точностью позволяет снизить динамические нагрузки на механических передаточных устройствах электроприводов и деталях ЭМ и ЭМДП. Это улучшает эксплуатационные характеристики электродвигателя и электропривода в целом, а также повышает надежность электродвигателя.
О точности и быстродействии канала регулирования электромагнитного момента в заявляемом способе свидетельствуют графики, приведенные на фиг.1 и фиг.3, где в момент времени 0,3 с подают резко-переменный момент сопротивления MC на вал ЭМ и ЭМДП, а в момент времени 0,5 с управляют электромагнитным моментом ЭМ и ЭМДП с целью поддержания на постоянном уровне электрической частоты вращения ротора рω, т.е. электромагнитный момент изменяют в соответствии с моментом сопротивления М=MC. На этих графиках видно, что временная зависимость электромагнитного момента с момента времени 0,5 с в точности повторяет форму временной зависимости момента сопротивления, т.е. они совпадают.
Чтобы получить представление о процессе управления ЭМ и ЭМДП, рассмотрим его как задачу управления состоянием машины с целью обеспечения максимальной близости во время управления момента задания (Mz) и электромагнитного момента машины (М).
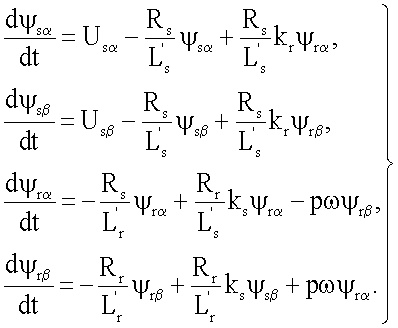
Состояние ЭМ будем описывать системой дифференциальных связей по (Ковач К., Рац И. Переходные процессы в машинах переменного тока. - М. - Л.: Госэнергоиздат, 1963 - 744 с.), определяющих характер изменения фазовых координат с выделением в них управляющих воздействий - проекций вектора напряжения статора Usα, Usβ на оси неподвижной системы координат α-β для электродвигателя с короткозамкнутым ротором.
ЭМ с фазным ротором, которая может получать питание по цепи ротора (ЭМДП), будем рассматривать в роторной системе координат d-q. Управляющими воздействиями в этом случае принимаем Urd, Urq - проекции вектора напряжения ротора по осям координатной системы d-q.
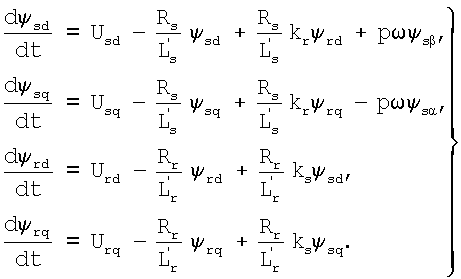
Здесь параметры, начинающиеся с R и индексами s, r - активные сопротивления обмоток статоров и роторов ЭМ, L'S, L'r - переходные индуктивности статора и ротора, kr, ks - коэффициенты электромагнитной связи, р - число пар полюсов, ω - геометрическая угловая скорость вращения ротора электродвигателя, ψS ψr с индексами α, β, d, q - составляющие потокосцеплений статора и ротора по осям соответствующей системы координат, Us, Ur с индексами координатной системы - составляющие напряжений статора и ротора.
Задача управления ЭМ и ЭМДП может рассматриваться как задача минимизации функционала, записанного в интегральной форме и выражающего цель управления: 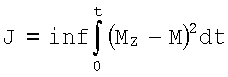 , где MZ, M - необходимое и мгновенное значения электромагнитного момента ЭМ и ЭМДП.
, где MZ, M - необходимое и мгновенное значения электромагнитного момента ЭМ и ЭМДП.
Решение этой задачи с использованием известных методов оптимизации, например принципа максимума Л.С.Понтрягина [Понтрягин Л.С, Болтянский В.Г., Гамкрелидзе Р.В., Мищенко Е.Ф. Математическая теория оптимальных процессов. - М.: Наука, 1983. - 392 с.], позволяет получить результат как способ формирования векторов напряжений статора ЭМ (например, в случае управления АД с короткозамкнутым ротором) и ротора (для ЭМДП).
Он записывается так:



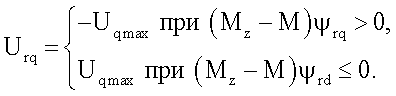
Umax - с соответствующим индексом (α, β, d, q) перед max - максимально возможные значения составляющих векторов напряжений.
После преобразования переменных в вышеприведенных выражениях из двухфазной системы координат α-β, неподвижной относительно статора, в трехфазную систему координат а-b-с, неподвижную относительно статора, а также преобразования переменных из двухфазной системы координат d-q, неподвижной относительно ротора, в трехфазную систему координат x-y-z, неподвижную относительно ротора (см. например, стр.8, Панкратов В.В. Векторное управление асинхронными электроприводами: Учеб. пособие. - Новосибирск: Изд-во НГТУ, 1999 - 66 с.), получаются следующие выражения:

Суть результата решения сводится к утверждению, что обеспечение заданного значения электромагнитного момента ЭМ возможно осуществить путем задания напряжения питания со стороны статора (или ротора для машины двойного питания) в соответствии с найденными выражениями.
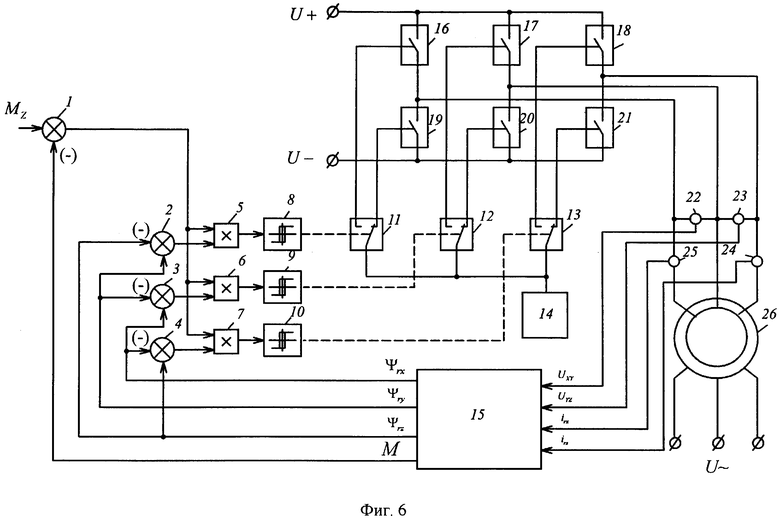
Заявляемый способ управления моментом ЭМ и ЭМДП реализуется, например, следующим образом (фиг.5 и фиг.6):
- идентифицируются значения токов и напряжений в обмотках ЭМ (26 на фиг.5) и ЭМДП (26 на фиг.6) с помощью датчиков токов 24, 25 и датчиков напряжений 22, 23;
- вычисляются значения составляющих потокосцепления статора для ЭМ и потокосцеплений ротора для ЭМДП и электромагнитного момента в блоке 15 в соответствии с известными алгоритмами (например, Fig.5. Patent Number 4, 678, 248 United States. Int. CI.4 H02P 7/36. Direct self-control of the flux and rotary moment of a rotary-field machine / Depenbrock Manfred. Assignee: Brown, Boveri & Cie AG, Mannheim, Fed. Rep. of Germany. Foreign Application Priority Data Oct.20, 1984. Date of Patent: Jul.7, 1987) или, используя адаптивную модель ЭМ (например: Page 27. Technical Guide No.1 - Direct Torque Control - the world's most advanced AC drive technology. ABB Industry Drives, 1999; Рис.6.15. Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием / - М.: Издательский центр «Академия», 2006 - 272 с.);
- для управления ЭМ (фиг.5): при помощи суммирующих 1, 2, 3, 4 и перемножающих элементов 5, 6, 7 вычисляются значения выражений (ψSc-ψSb)(MZ-М), (ψSa-ψSc)(MZ-М), (ψSb-ψSa)(MZ-М), затем вычисленные значения подаются на вход элементов сравнения 8, 9, 10, где сравниваются с 0 (если значение сигнала больше 0, то на выходе элемента сравнения формируется сигнал логической 1, если меньше или равно 0, то формируется сигнал логического 0), сигналы с выходов блоков 8, 9, 10 действуют на переключатели 11, 12, 13, подключающие устройство управления 14, выдающее сигнал логической 1 при разрешении работы, либо логического 0 при запрете, к одному из двух ключей плеч инвертора 16-19, 17-20, 18-21 (если на ключ подается сигнал логической 1, то ключ замыкается, иначе, размыкается), в результате чего напряжение U подается на обмотки статора ЭМ, и формируется вектор напряжения статора, необходимый для поддержания заданного электромагнитного момента MZ,
- для управления ЭМДП (фиг.6): при помощи суммирующих 1, 2, 3, 4 и перемножающих элементов 5, 6, 7 вычисляются значения выражений (ψry-ψrz)(MZ-М), (ψrz-ψrx)(MZ-М), (ψrx-ψry)(MZ-М), затем вычисленные значения подаются на вход элементов сравнения 8, 9, 10, где сравниваются с 0 (если значение сигнала больше 0, то на выходе элемента сравнения формируется сигнал логической 1, если меньше или равно 0, то формируется сигнал логического 0), сигналы с выходов блоков 8, 9, 10 действуют на переключатели 11, 12, 13, подключающие устройство управления 14, выдающее сигнал логической 1 при разрешении работы, либо логического 0 при запрете, к одному из двух ключей плеч инвертора 16-19, 17-20, 18-21 (если на ключ подается сигнал логической 1, то ключ замыкается, иначе, размыкается), в результате чего напряжение U подается на обмотки ротора ЭМДП, и формируется вектор напряжения ротора, необходимый для поддержания заданного электромагнитного момента MZ.
Заявляемый способ управления моментом электрической машины переменного тока позволяет:
- улучшить эксплуатационные характеристики электродвигателя и электропривода в целом;
- повысить надежность электродвигателя;
- управлять динамическим состоянием механического передаточного устройства электропривода и, как следствие, снизить в нем динамические нагрузки.
Изобретение относится к области электротехники, а именно к способам управления величиной электромагнитного момента электрической машины переменного тока, получающей питание от автономного инвертора напряжения со стороны статора или со стороны ротора для электрической машины двойного питания. Согласно данному изобретению вначале устанавливают заданное значение электромагнитного момента и определяют мгновенные значения потокосцеплений фаз статора или ротора и мгновенное значение электромагнитного момента. Затем вычисляют и формируют фазные напряжения статора для электрической машины, получающей питание со стороны статора, или фазные напряжения ротора для электрической машины двойного питания. Технический результат, достигаемый при использовании изобретения, - снижение динамических нагрузкок в передаточном устройстве электропривода, а также улучшение эксплуатационных характеристик двигателя и повышение надежности электропривода. 2 н.п. ф-лы, 6 ил.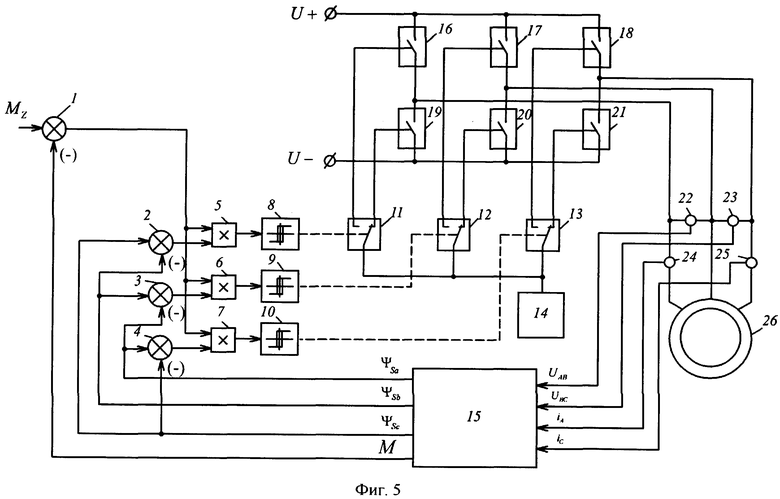
1. Способ управления величиной электромагнитного момента электрической машины переменного тока, включающий установку заданного значения электромагнитного момента, измерение и вычисление значений фазных токов и напряжений обмоток статора машины для определения мгновенных значений электромагнитного момента и потокосцеплений статора, отличающийся тем, что определяют знаки выражений
(ψSc-ψSb)(MZ-M);
(ψSa-ψSc)(MZ-M);
(ψSb-ψSa)(MZ-M),
где ψSa, ψSb, ψSc - потокосцепления обмоток статора электрической машины в трехфазной неподвижной системы координат а-b-с;
mz, M - заданное и действительное значения электромагнитного момента двигателя,
и формируют фазные напряжения на обмотках двигателя в соответствии со следующими условиями:



где USamax, USbmax, UScmax - максимально допустимые значения фазных напряжений обмоток статора двигателя;
USa, USb, USc - значения формируемых фазных напряжений обмоток статора двигателя.
2. Способ управления величиной электромагнитного момента электрической машины переменного тока двойного питания, включающий установку заданного значения электромагнитного момента, измерение и вычисление значений фазных токов и напряжений обмоток ротора машины для определения мгновенных значений электромагнитного момента и потокосцеплений ротора, отличающийся тем, что определяют знаки выражений
(ψry-ψrz)(MZ-M);
(ψrz-ψrx)(MZ-M);
(ψrx-ψry)(MZ-M),
где ψrz, ψry, ψrz - потокосцепления обмоток ротора двигателя в трехфазной системе координат х-y-z, неподвижной относительно ротора;
Mz, M - заданное и действительное значения электромагнитного момента двигателя,
и формируют фазные напряжения на обмотках ротора двигателя в соответствии со следующими условиями:



где Urxmax, Urymax, Urzmax - максимально допустимые значения фазных напряжений обмоток ротора двигателя;
Urx, Ury, Urz - значения формируемых фазных напряжений обмоток ротора двигателя.
| US 4678248 А, 07.07.1987 | |||
| BONNET F.E., VIDAL P.E | |||
| and PIETRZAK-DAVID M | |||
| Direct torque control of doubly fen induction machine // Bulletin of the polish academy of sciences | |||
| Technical Sciences | |||
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ АСИНХРОННОГО ДВИГАТЕЛЯ | 2005 |
|
RU2306666C1 |
| RU 2132110 C1, 20.06.1999 | |||
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ, УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА И БЛОК ФОРМИРОВАНИЯ ЗАДАННЫХ ЗНАЧЕНИЙ ТОКА ВОЗБУЖДЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА ТОКА СТАТОРА ПО ПРОДОЛЬНОЙ И ПОПЕРЕЧНОЙ ОСЯМ | 2003 |
|
RU2250552C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |

