ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее техническое решение относится к системам точного измерения сдвига фаз между сигналами, использующее выделение квадратурных составляющих для одного из сравниваемых сигналов и может использоваться для высокоточного фазового детектирования, в том числе в аналоговых системах при использовании компаратора для дополнительного преобразования аналогового сигнала в цифровой сигнал.
УРОВЕНЬ ТЕХНИКИ
[0002] Известно устройство и метод (US 2018/0224524, A1, G01S 7/02 (2006.01), G01S 7/28 (2006.01), Aug. 09, 2018) оценки разности фаз между сигналами, которое содержит управляемую линию задержки, устройство выборки, блок подавления шумов, блок корреляции, управляющий и вычислительный контроллер. Принцип работы устройства основан на перестройке управляемой линии задержки, на вход которой подается сигнал опорной частоты, а выход управляет устройством выборки измеряемого сигнала. В процессе измерения используются только цифровые сигналы, при необходимости измерить разность фаз аналоговых сигналов они должны быть преобразованы в цифровую форму. Для уменьшения воздействия шумов и помех на устройство измерения разности фаз предусмотрено использование блока подавления шумов, который использует выборки сигналов на нескольких тактовых интервалах.
[0003] Недостатком метода является ограничение точности измерения разности фаз, определяемое минимальным шагом перестройки управляемой линии задержки, а также чувствительностью характеристик линии задержки к воздействию внешних возбуждающих факторов (температура, напряжение питания и т.д.).
[0004] Известен способ (RU 2645440, C1, G01R/00 (2006.01), 21.02.2018) измерения разности фаз двух квазигармонических сигналов путем измерения амплитуд трех сигналов: двух исходных сигналов, фазовый сдвига которых измеряется, и третьего сигнала, формируемого как сумма двух исходных сигналов. Расчет не искаженных шумом значений амплитуд трех анализируемых сигналов осуществляется методом анализа райсовских данных. Амплитуды трех анализируемых сигналов, "очищенные" от неизбежного влияния гауссовского шума, формируют треугольник, что позволяет рассчитать искомую разность фаз исходя из простых геометрических соображений.
Разность фаз определяется следующим соотношением:
где: А1, А2 - амплитуды исходных сигналов, а А3 - амплитуда суммарного сигнала.
[0005] Недостатком предлагаемого способа является необходимость использования аналоговых сигналов для оценки амплитуд, сложность процедуры статистического оценивания амплитуд сигналов, невозможность использования метода для оценки разности фаз цифровых сигналов.
[0006] Наиболее близким по технической сущности к предложенному является система измерения фазы, основанная на устройстве синхронизации, цифровом фазовом детекторе, корреляторе, устройстве определения полярности, вычислительном модуле (J. Mitra, Т. Nayak. An FPGA-Based Phase Measurement System //IEEE Transactions on Very Large Scale Integration (VLSI) Systems. October, 2017, PP. 1-10. 10.1109/TVLSI.2017.2758807). Определение разности фаз двух цифровых сигналов с одинаковыми частотами основано на их выборке с помощью опорного цифрового сигнала с частотой, кратной частоте сигналов, с последующим цифровым фазовым детектированием на элементе XOR и накоплением результата детектирования в корреляторе на протяжении времени измерения. Учитывая, что детекторная характеристика фазового детектора на элементе XOR имеет линейный вид, разность фаз двух цифровых сигналов с одинаковыми частотами определяется линейной зависимостью от результата измерения в соответствии со следующими формулами:
у[t]=x[t] ⊗ x[t+ΔϕT/360°],
Δϕ=90° × R,
где: x[t] - исходный первый цифровой сигнал, x[t+ΔϕТ/360°] - исходный второй цифровой сигнал, сдвинутый по фазе на измеряемую величину относительно первого цифрового сигнала, Т - период измеряемых цифровых сигналов, y[t] - сигнал на выходе фазового детектора на элементе XOR, Ts=T/D - период опорного цифрового сигнала, используемого для оцифровки, частота которого имеет кратность D к частотам исходных сигналов, R - отношение сигналов на выходе корреляторов.
[0007] Недостатком наиболее близкого технического решения является статическая ошибка измерения разности фаз, вызванная конечной кратностью частоты дискретизации опорного сигнала и частоты измеряемых сигналов, необходимость точного измерения полярности одного измеряемых сигналов для исключения неопределенности измерения разности фаз во всем диапазоне возможных значений (0,360] градусов. Наличие даже небольшой ошибки в определении сигнала полярности приводит к существенным ошибкам измерения фазы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0008] Заявленное изобретение позволяет решить существующую техническую проблему, охарактеризованную недостатками известных из уровня техники решений, за счет реализации нового способа измерения разности фаз между двумя цифровыми сигналами.
[0009] Технический результат заключается в увеличении точности измерения разности фаз между двумя сигналами, при малой сложности устройства измерения.
[0010] Заявленный технический результат достигается с помощью устройства для измерения разности фаз между входными сигналами, которое содержит
первое устройство дискретизации, выполненное с возможностью получения из первого входного сигнала x1(t) цифрового сигнала x1[t] и передачу его в цифровую систему фазовой автоподстройки частоты (ЦСФАПЧ);
второе устройство дискретизации, выполненное с возможностью получения из второго входного сигнала x2(t) цифрового сигнала x2[k] и передачу его в фазовые детекторы;
ЦСФАПЧ, выполненную с возможностью формирования опорного сигнала на основании первого цифрового сигнала x1[k], причем опорный сигнал состоит из двух квадратурных цифровых сигналов  и
и  разность фаз между которыми равна 90°, и передачи квадратурных сигналов в фазовые детекторы;
разность фаз между которыми равна 90°, и передачи квадратурных сигналов в фазовые детекторы;
фазовые детекторы, выполненные с возможностью формирования сигналов I и Q, пропорциональных разности фаз между квадратурными цифровыми сигналами  и
и  и вторым цифровым сигналом х2[k], получаемых на входы фазовых детекторов;
и вторым цифровым сигналом х2[k], получаемых на входы фазовых детекторов;
сумматоры-накопители Σ, выполненные с возможностью выделения постоянной составляющей сигналов I и Q на выходах фазовых детекторов;
счетчик N состояний, выполненный с возможностью счета тактовых импульсов измерения фаз сигналов и сброса через N тактов времени из его состояния в нулевое значение и выдачи импульса окончания измерения;
вычислительное устройство, выполненное с возможностью оценки разности фаз по полученным значениям сигналов I и Q, обработанных фазовыми детекторами.
[0011] В одном из частных примеров реализации устройства дискретизации построены на цепочке D-триггеров.
[0012] В другом частном примере реализации вычислительное устройство определяет оценку разности фаз на основании результатов предварительной калибровки устройства, компенсации ошибки формирования квадратур сигналов, и компенсации влияния скважности импульсов сигналов x1(t) и х2(t) на результат измерения.
[0013] В другом частном примере реализации вычисление разности фаз сигналов осуществляется с учетом отклонения детекторной характеристики фазовых детекторов от линейного вида в областях разности фаз 0°, 90°, 180°, 270°.
[0014] В другом частном примере реализации фазовые детекторы представляют собой элементы исключающее ИЛИ.
[0015] Заявленный технический результат также достигается с помощью устройства для измерения разности фаз между входными сигналами, которое содержит
аналоговую систему фазовой автоподстройки частоты (АСФАПЧ), выполненную с возможностью подачи на вход первого входного сигнала x1(t) и формирования на его основании синфазного и квадратурного сигналов  и
и  разность фаз между которыми равна 90°, передаваемых на вход первому и второму устройству дискретизации;
разность фаз между которыми равна 90°, передаваемых на вход первому и второму устройству дискретизации;
первое устройство дискретизации, выполненное с возможностью получения из синфазного сигнала  цифрового сигнала
цифрового сигнала  и его передачи в фазовый детектор;
и его передачи в фазовый детектор;
второе устройство дискретизации, выполненное с возможностью получения из квадратурного сигнала  цифрового сигнала
цифрового сигнала  и его передачи в фазовый детектор;
и его передачи в фазовый детектор;
третье устройство дискретизации, выполненное с возможностью получения из второго входного сигнала x2(t) цифрового сигнала x2[k] и его передачи в фазовые детекторы;
фазовые детекторы, выполненные с возможностью формирования сигналов I и Q, пропорциональных разности фаз между квадратурными цифровыми сигналами  и
и  и вторым цифровым сигналом х2[k], получаемых на входы фазовых детекторов;
и вторым цифровым сигналом х2[k], получаемых на входы фазовых детекторов;
сумматоры-накопители Σ, выполненные с возможностью выделения постоянной составляющей сигналов I и Q на выходах фазовых детекторов;
счетчик N состояний, выполненный с возможностью счета тактовых импульсов измерения фаз сигналов и сброса через N тактов времени из его состояния в нулевое значение и выдачи импульса окончания измерения;
вычислительное устройство, выполненное с возможностью оценки разности фаз по полученным значениям сигналов I и Q, обработанных фазовыми детекторами.
[0016] В одном из частных примеров реализации устройства дискретизации построены на цепочке D-триггеров.
[0017] В другом частном примере реализации вычислительное устройство определяет оценку разности фаз на основании результатов предварительной калибровки устройства, компенсации ошибки формирования квадратур сигналов, и компенсации влияния скважности импульсов сигналов x1(t) и х2(t) на результат измерения.
[0018] В другом частном примере реализации вычисление разности фаз сигналов осуществляется с учетом отклонения детекторной характеристики фазовых детекторов от линейного вида в областях разности фаз 0°, 90°, 180°, 270°.
[0019] В другом частном примере реализации фазовые детекторы представляют собой элементы исключающее ИЛИ.
[0020] Заявленный технический результат также достигается за счет выполнения способа измерения разности фаз между входными сигналами с помощью устройства по первому варианту реализации, и содержит этапы, на которых:
получают из первого входного сигнала x1(t) первый цифровой сигнал x1[t];
получают из второго входного сигнала x2(t) второй цифровой сигнал х2[k];
формируют опорный сигнала на основании первого цифрового сигнала x1[k], причем опорный сигнал состоит из двух квадратурных цифровых сигналов  и
и  разность фаз между которыми близка к 90°;
разность фаз между которыми близка к 90°;
формируют сигналы I и Q, пропорциональные разности фаз между квадратурными цифровыми сигналами  и
и  и вторым цифровым сигналом x2[k];
и вторым цифровым сигналом x2[k];
выделяют постоянную составляющую сигналов I и Q;
оценивают разность фаз по полученным значениям сигналов I и Q.
[0021] Заявленный технический результат также достигается за счет выполнения способа измерения разности фаз между входными сигналами с помощью устройства по второму варианту реализации, и содержит этапы, на которых:
получают первый входной сигнал x1(t) и формируют на его основании синфазный и квадратурный сигналы  и
и  разность фаз между которыми близка к 90°;
разность фаз между которыми близка к 90°;
получают из синфазного сигнала  цифровой сигнал
цифровой сигнал 
получают из квадратурного сигнала  цифровой сигнал
цифровой сигнал 
получают второй входной сигнал x2(t) и формируют на его основании цифровой сигнал х2[k];
формируют сигналы I и Q, пропорциональные разности фаз между квадратурными цифровыми сигналами  и
и  и цифровым сигналом х2[k];
и цифровым сигналом х2[k];
выделяют постоянную составляющую сигналов I и Q;
оценивают разность фаз по полученным значениям сигналов I и Q.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
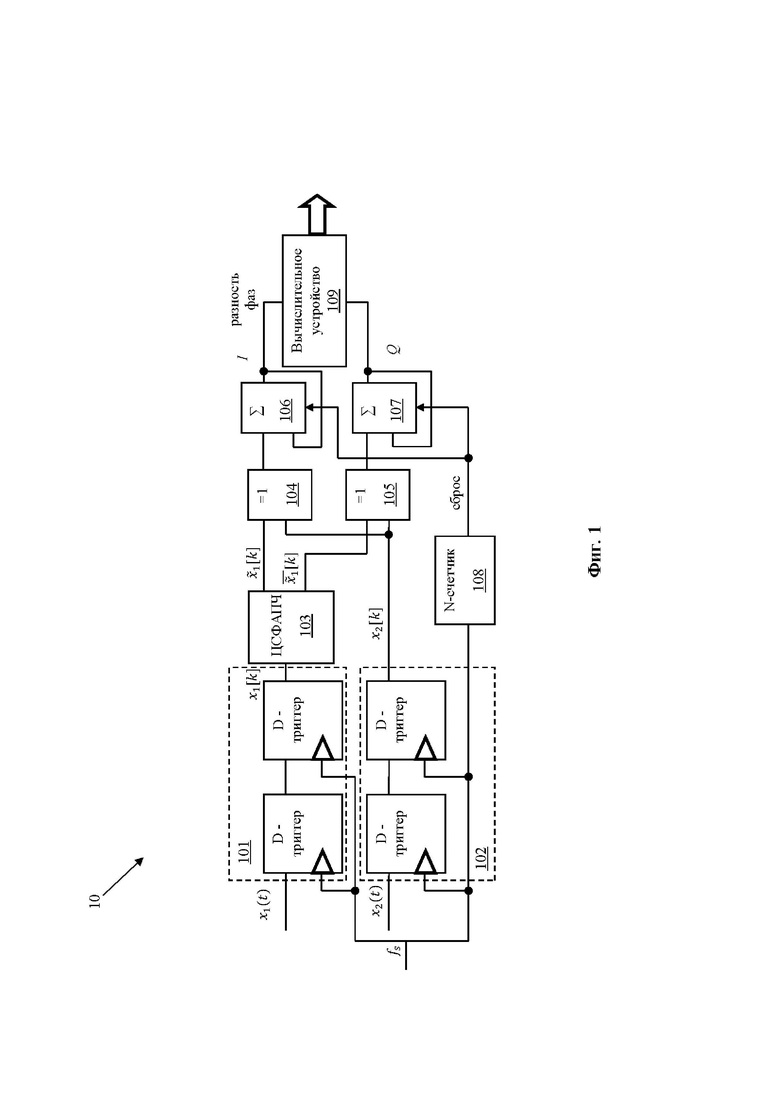
[0022] Фиг. 1. Структурная схема устройства точного измерения разности фаз с использованием цифровой системы фазовой автоподстройки частоты.
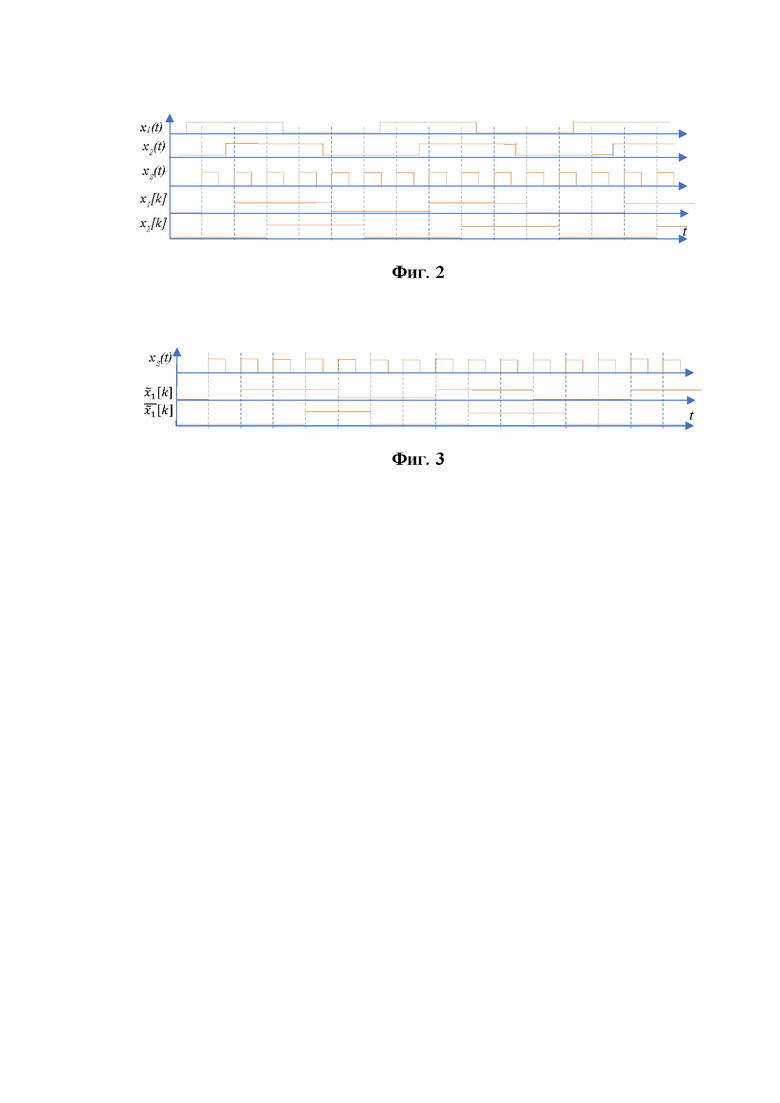
[0023] Фиг. 2. Диаграмма сигналов на входах и выходах системы дискретизации.
[0024] Фиг. 3. Диаграмма квадратурных сигналов на выходе цифровой системы фазовой автоподстройки частоты.
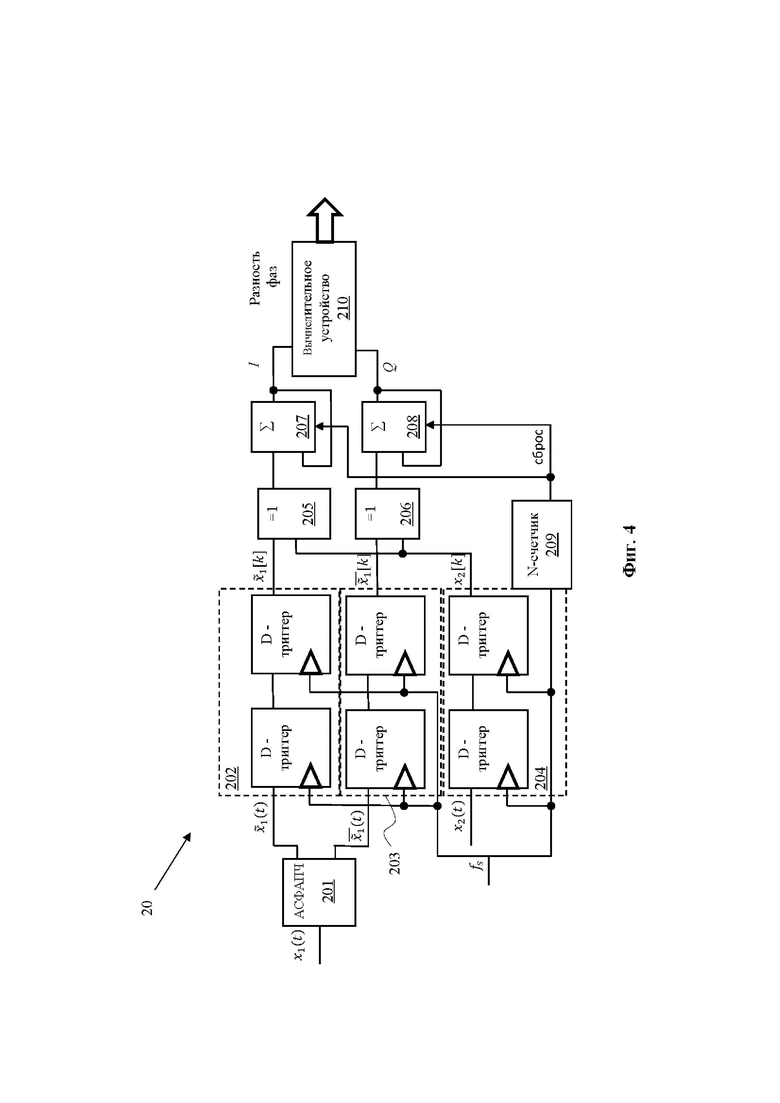
[0025] Фиг. 4. Структурная схема устройства точного измерения разности фаз с использованием аналоговой системы фазовой автоподстройки частоты.
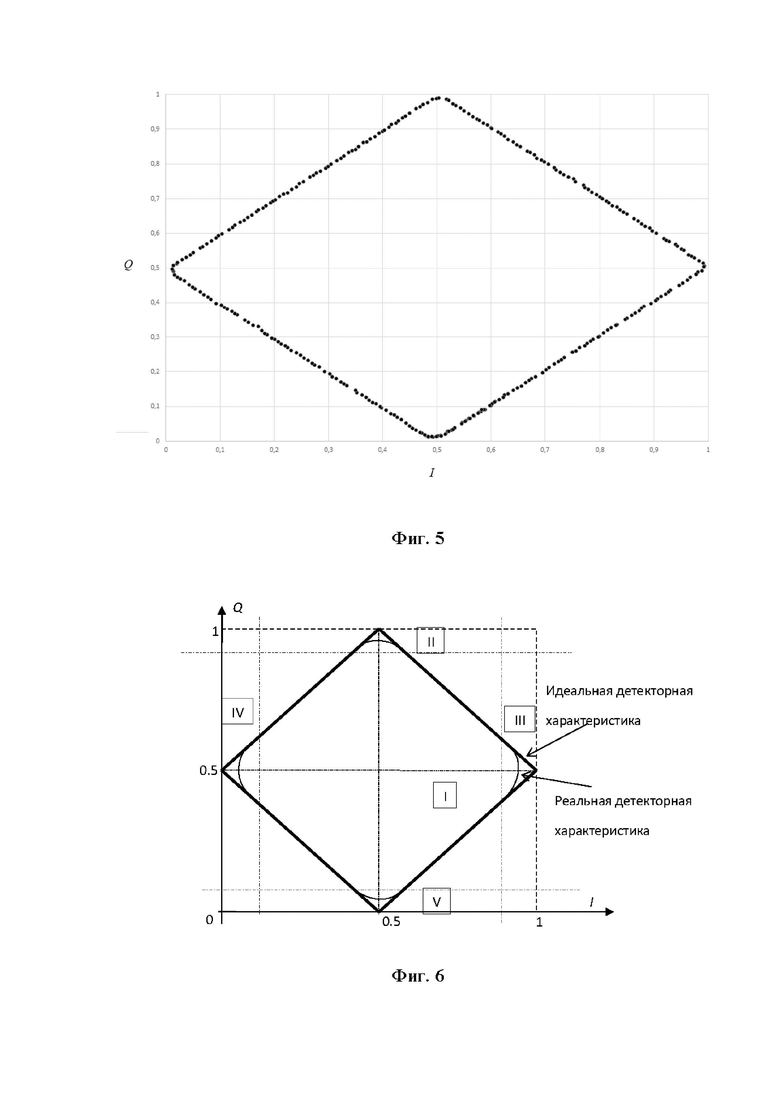
[0026] Фиг. 5. Результаты предварительной калибровки измерителя разности фаз.
[0027] Фиг. 6. Зонирование детекторной характеристики измерителя разности фаз в алгоритме вычисления.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0028] Настоящее техническое решение предлагает способ, реализуемый с помощью соответствующих схем и устройств, по нахождению значения разности фаз между входными сигналами х1(t) и x2(t). Необходимыми условиями являются периодичность сигналов с одинаковым периодом, наличие только по одному возрастающему и убывающему фронтам сигнала внутри одного периода сигналов: переход неотрицательный сигнал - отрицательный сигнал, отрицательный сигнал - неотрицательный сигнал. Скважности сигналов х1(t) и x2(t) могут быть любые и не обязательно совпадающие. Осуществление настоящего решения подразумевает два способа реализации. В обоих способах реализации используется вспомогательный периодический тактовый сигнал с частотой ƒS, кратной частоте измеряемых сигналов ƒ:
 m<n,
m<n,
где m и n взаимно простые числа, причем наиболее предпочтительны тактовые частоты с минимальным n.
[0029] На Фиг. 1 представлена схема первого варианта устройства (10) для измерения разности фаз между входными сигналами и реализуемый с помощью него способ. При выполнении способа с помощью устройства (10) в его составе применяется цифровая система фазовой автоподстройки частоты (ЦСФАПЧ).
[0030] Входные сигналы x1(t) и x2(t), представляющие собой периодическую последовательность импульсов, имеют одинаковую частоту, но неизвестный постоянный сдвиг фаз, который требуется определить. На скважность последовательности импульсов жестких ограничений не накладывается. Измеряемые сигналы подвергаются дискретизации с частотой ƒS, кратной частотам повторения измеряемых сигналов.
[0031] Сигналы х1(t) и x2(t) подаются на первое и второе устройства дискретизации (101, 102), построенные на основе цепочки D-триггеров. Сигнал дискретизации частоты ƒS может быть получен, например, путем умножения частоты одного из измеряемых сигналов во внешней аналоговой системе фазовой автоподстройки или из системы формирования сигналов x1(t) и x2(t), если она располагается в непосредственной близости от измерителя. ЦСФАПЧ (103) может быть реализована с использованием различных схем, например приведенных в [1]. На выходные сигналы ЦСФАПЧ (103) не накладывается условие точной ортогональности. Неортогональность выходных сигналов приводит к введению поправочного коэффициента в калибровочную процедуру в программе вычислительного устройства (109).
[0032] Последовательная цепочка D-триггеров позволяет уменьшить влияние явления метастабильности на результат измерения. Вся последующая обработка сигналов осуществляется в цифровом виде.
[0033] Для измерения разности фаз двух цифровых сигналов x1[k], х2[k], формируемых устройствами дискретизации (102, 103) один из них выбирается в качестве опорного. В схеме (10) в качестве опорного сигнала для формирования квадратурных сигналов  и
и  на выходе ЦСФАПЧ (103) используется сигнал x1[k]. Тильда над обозначением сигналов означает оценку фазы исходного сигнала x1[k], которая отличается от истинного значения на величину ошибки работы ЦСФАПЧ (103). ЦСФАПЧ (103) формирует на своем выходе два меандра со скважностью 2, фаза первого из которых повторяет фазу входного сигнала, а фаза второго сдвинута на 90° относительно фазы первого. Таким образом, в случае нулевой ошибки подстройки ЦСФАПЧ (103) квадратурные сигналы могут быть определены следующим образом:
на выходе ЦСФАПЧ (103) используется сигнал x1[k]. Тильда над обозначением сигналов означает оценку фазы исходного сигнала x1[k], которая отличается от истинного значения на величину ошибки работы ЦСФАПЧ (103). ЦСФАПЧ (103) формирует на своем выходе два меандра со скважностью 2, фаза первого из которых повторяет фазу входного сигнала, а фаза второго сдвинута на 90° относительно фазы первого. Таким образом, в случае нулевой ошибки подстройки ЦСФАПЧ (103) квадратурные сигналы могут быть определены следующим образом:

На Фиг. 2 представлена диаграмма входных и оцифрованных сигналов.
[0034] Для получения корректного результата измерения разности фаз в предлагаемом устройстве (10) необходимо, чтобы D-триггеры имели большие времена установки и удержания.
[0035] Квадратурные сигналы  представленные на Фиг. 3, далее подаются параллельно с сигналом x2[k] на вход фазовых детекторов (104, 105), которые выполняются как элементы исключающее ИЛИ (XOR). На выходе фазовых детекторов (104, 105) формируется постоянная составляющая, пропорциональная разности фаз сигналов на входе. Для выделения постоянной составляющей сигналов I и Q на выходах фазовых детекторов (104, 105) используются сумматоры-накопители Σ (106, 107).
представленные на Фиг. 3, далее подаются параллельно с сигналом x2[k] на вход фазовых детекторов (104, 105), которые выполняются как элементы исключающее ИЛИ (XOR). На выходе фазовых детекторов (104, 105) формируется постоянная составляющая, пропорциональная разности фаз сигналов на входе. Для выделения постоянной составляющей сигналов I и Q на выходах фазовых детекторов (104, 105) используются сумматоры-накопители Σ (106, 107).
[0036] Цикл измерения составляет N тактов частоты ƒS. Начало и окончание цикла измерения определяется счетчиком на N состояний (108), который формирует сигнал сброса по достижении максимального счета. Счетчик (108) обеспечивает счет тактовых импульсов измерения фаз сигналов и сброса через N тактов времени из его состояния в нулевое значение и выдачи импульса окончания измерения. Длительность цикла измерений составляет N периодов частоты ƒS. В конце цикла измерении на выходах сумматоров-накопителей (106, 107) формируются сигналы I и Q, значения которых пропорциональны корреляции между сигналом и синфазной и квадратурной составляющими сигнала х1[t].
[0037] На вычислительное устройство (109) (микроконтроллер или микропроцессор) подаются результаты I и Q усреднения сигналов x1[k], х2[k] на выходах фазовых детекторов (104, 105). Вычислительное устройство (109) определяет оценку разности фаз с учетом предварительной калибровки устройства, компенсацию ошибки формирования квадратур (неточный сдвиг фаз 90°), компенсацию влияния скважности импульсов сигналов x1(t) и x1(t) на результат измерения, вычисление разности фаз сигналов с учетом отклонения детекторной характеристики фазовых детекторов (104, 105) от линейного вида в областях разности фаз (0° 90°, 180°, 270°) за счет явления метастабильного состояния.
[0038] На Фиг. 4 представлен второй вариант реализации схемы устройства (20) предполагает использование аналоговой системы ФАПЧ (АСФАПЧ) (201) для формирования квадратурных сигналов. На выходе АСФАПЧ (201) формируются синфазная и квадратурная составляющие выбранного опорного сигнала (в данном случае x1[t]):

[0039] В этом случае требуется выполнить дискретизацию трех сигналов: синфазной и квадратурной составляющей первого сигнала и второго сигнала. Необходимость дискретизации дополнительного сигнала приводит к появлению дополнительных ошибок, связанных различными путями распространения синфазной и квадратурной составляющих. Преимуществом такой реализации является возможность уменьшения влияния шумов на результат измерения, поскольку в АСФАПЧ (201) существуют дополнительные меры увеличения отношения сигнал/шум. Алгоритм работы цифровой части данного способа реализации аналогичен тому, как он описан для предыдущего способа.
[0040] АСФАПЧ (201) обеспечивает возможность подачи на вход первого входного сигнала x1(t) и формирования на его основании синфазного и квадратурного сигналов  и
и  разность фаз между которыми равна 90°, которые передаются на вход первому и второму устройству дискретизации (202, 203).
разность фаз между которыми равна 90°, которые передаются на вход первому и второму устройству дискретизации (202, 203).
[0041] Первое устройство дискретизации (202) обеспечивает получение из синфазного сигнала  цифровой сигнал
цифровой сигнал  для его последующей передачи в фазовый детектор (205). Второе устройство дискретизации (203) обеспечивает получение из квадратурного сигнала
для его последующей передачи в фазовый детектор (205). Второе устройство дискретизации (203) обеспечивает получение из квадратурного сигнала  цифровой сигнал
цифровой сигнал  и его последующую передачу в фазовый детектор (206). Третье устройство (204) дискретизации обеспечивает получение из второго входного сигнала x2(t) цифрового сигнала х2[k] и его передачу в фазовые детекторы (205, 206).
и его последующую передачу в фазовый детектор (206). Третье устройство (204) дискретизации обеспечивает получение из второго входного сигнала x2(t) цифрового сигнала х2[k] и его передачу в фазовые детекторы (205, 206).
[0042] Фазовые детекторы (205, 206) формируют на выходах сигналы I и Q, пропорциональные разности фаз между квадратурными цифровыми сигналами  и
и  и вторым цифровым сигналом х2[k], получаемых на их входах.
и вторым цифровым сигналом х2[k], получаемых на их входах.
[0043] Сумматоры-накопители Σ (207, 208) работают аналогичным образом, как и в схеме (10), и обеспечивают возможность выделения постоянной составляющей сигналов I и Q на выходах фазовых детекторов (205, 206).
[0044] Счетчик N состояний (209) обеспечивает подсчет тактовых импульсов измерения фаз сигналов и сброса через N тактов времени из его состояния в нулевое значение и выдачи импульса окончания измерения.
[0045] Вычислительное устройство (210) реализует вычислительный алгоритм для оценки разности фаз по полученным значениям сигналов I и Q, обработанных фазовыми детекторами (205, 206).
[0046] Вычислительное устройство (109, 210) в каждой из представленных схем устройств (10, 20) реализует процедуру окончательного вычисления измеряемой разности фаз. Определение разности фаз осуществляется по предварительно полученной калибровочной кривой, учитывающей неидеальность получения синфазной и квадратурной составляющей, задержки сигналов в схеме измерения, переходные характеристики D-триггеров. Пример калибровочной кривой приведен на Фиг. 5.
[0047] Как представлено на Фиг. 6 вычислительное устройство (109, 210) выполняет оценку разности фаз по полученным сигналам I и Q в соответствии с заданным алгоритмом. На Фиг. 6 толстым линиям соответствуют значения I и Q для идеального измерителя разности фаз, тонким линиям соответствуют значения I и Q реального измерителя разности фаз, штрихпунктирными линиями обозначены границы областей I, II, III, IV и V в соответствии с которыми вычислительное устройство выполняет вычисление разности фаз.
[0048] При попадании значений I и Q в область I вычислительное устройство (109, 210) выносит оценку разности фаз как среднее арифметическое оценок разности фаз по значениям I и Q. При попадании значений I и Q в области II, III, IV или V вычислительное устройство (109, 210) определяет оценку разности фаз через аппроксимацию нелинейный части по заранее калиброванным значениям.
[0049] За значение разности фаз (угла) принимается значение точки на калибровочной кривой (Ical, Qcal), при котором расстояние между точками (I, Q) и (Ical, Qcal) будет минимальным. Операция вычисления разности фаз по полученным значениям I и Q выполняется в устройстве (109, 210).
[0050] Реализация модели приводит к повышению точности измерения разности фаз двух сигналов, в том числе аналоговых гармонических сигналов при использовании компараторов для их оцифровки, при простоте цифровой реализации.
[0051] Предлагаемый способ за счет применения в схемах устройств (10, 20) двух фазовых детекторов позволяет исключить необходимость определения сигнала полярности, а также усовершенствовать алгоритм вычисления разности фаз с учетом компенсации. Реализация модели приводит повышению точности измерения разности фаз двух сигналов, в том числе аналоговых гармонических сигналов при использовании компараторов для их оцифровки, при простоте цифровой реализации.
[0052] В целях проверки предлагаемого способа высокоточного измерения разности фаз были проведены испытания, результаты которого представлены на Фиг. 5. В качестве примера тестовое устройство было реализовано по структурной схеме, представленной на Фиг. 4. Для множества значений разностей фаз, состоящего из 280 различных значений, было выполнено измерение значений I и Q. Тестовые разности фаз расположены случайным образом на отрезке (0, 360] градусов, величина N=65536. В реальном устройстве наблюдался небольшой сдвиг фазы синфазной и квадратурной составляющих, что выражается в преобразовании прямоугольника в параллелограмм. Испытания показали работоспособность предлагаемого способа определения разности фаз.
[0053] Использование результатов, приведенных в настоящем описании, позволит повысить точность измерения разности фаз в системах синхронизации, определения местоположения, системах точного времени, высокоточном измерении задержки между сигналами.
Источники информации:
1. Roland Е. Best. Phase-Locked Loops: Design, Simulation and Applications. - 6th. - McGraw-Hill Education, 2007.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННЫЙ ДАТЧИК СКОРОСТИ СБЛИЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА С ПРЕПЯТСТВИЕМ | 2013 |
|
RU2543493C1 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ ОПОРНОГО СИГНАЛА ВЫЧИСЛИТЕЛЬНЫМИ СРЕДСТВАМИ В СИСТЕМАХ ЧАСТОТНОЙ И ФАЗОВОЙ СИНХРОНИЗАЦИИ ШИРОКОПОЛОСНЫХ СИСТЕМ СВЯЗИ | 2013 |
|
RU2535198C1 |
| СПОСОБ ДЕМОДУЛЯЦИИ КРАТКОВРЕМЕННЫХ СИГНАЛОВ С МНОГОУРОВНЕВОЙ АБСОЛЮТНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ В УСЛОВИЯХ ЗАМИРАНИЙ | 2018 |
|
RU2684605C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕНИ ПРИХОДА СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2476986C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕНИ ПРИХОДА СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2483319C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕНИ ПРИХОДА СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2524843C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕНИ ПРИХОДА СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2476985C1 |
| Устройство автоподстройки несущей частоты | 1984 |
|
SU1298946A1 |
| СПОСОБ ПРИЕМА СИГНАЛА АМПЛИТУДНО-ФАЗОВОЙ МАНИПУЛЯЦИИ | 2002 |
|
RU2214691C1 |
| МОДУЛЬ ОЦЕНИВАНИЯ РАСФАЗИРОВКИ, МОДУЛЬ КОМПЕНСАЦИИ РАСФАЗИРОВКИ И КОГЕРЕНТНЫЙ ПРИЕМНИК | 2011 |
|
RU2557012C2 |
Изобретение относится к системам точного измерения сдвига фаз между сигналами, а именно к выделению квадратурных составляющих для одного из сравниваемых сигналов, и может использоваться для высокоточного фазового детектирования, в том числе в аналоговых системах при использовании компаратора для дополнительного преобразования аналогового сигнала в цифровой сигнал. Технический результат заключается в увеличении точности измерения разности фаз между двумя сигналами при малой сложности устройства измерения. Заявленная группа изобретений содержит два варианта устройства, каждый из которых включает в себя устройства дискретизации, фазовые детекторы, сумматоры-накопители, счетчик состояний и систему фазовой автоподстройки частоты. Заявленные способы подразумевают измерение разности фаз между вторым сигналом и синфазной и квадратурной составляющей первого сигнала в фазовых детекторах на элементах исключающее ИЛИ. Усредненные сигналы на выходах фазовых детекторов подвергаются математической обработке для компенсации неидеальности распространения сигналов в измерителе. 4 н. и 8 з.п. ф-лы, 6 ил.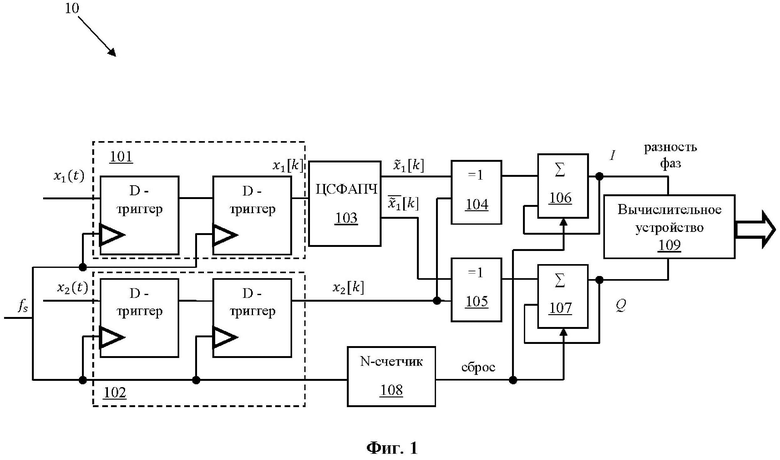
1. Устройство для измерения разности фаз между входными сигналами, содержащее
первое устройство дискретизации, выполненное с возможностью получения из первого входного сигнала x1(t) цифрового сигнала x1[t] и передачу его в цифровую систему фазовой автоподстройки частоты (ЦСФАПЧ);
второе устройство дискретизации, выполненное с возможностью получения из второго входного сигнала x2(t) цифрового сигнала x2[k] и передачу его в фазовые детекторы;
ЦСФАПЧ, выполненную с возможностью формирования опорного сигнала на основании первого цифрового сигнала x1[k], причем опорный сигнал состоит из двух квадратурных цифровых сигналов  и
и  , разность фаз между которыми равна 90º, и передачи квадратурных сигналов в фазовые детекторы;
, разность фаз между которыми равна 90º, и передачи квадратурных сигналов в фазовые детекторы;
фазовые детекторы, выполненные с возможностью формирования сигналов I и Q, пропорциональных разности фаз между квадратурными цифровыми сигналами и и вторым цифровым сигналом x2[k], получаемыми на входы фазовых детекторов;
сумматоры-накопители Σ, выполненные с возможностью выделения постоянной составляющей сигналов I и Q на выходах фазовых детекторов;
счетчик N состояний, выполненный с возможностью счета тактовых импульсов измерения фаз сигналов и сброса через N тактов времени из его состояния в нулевое значение и выдачи импульса окончания измерения;
вычислительное устройство, выполненное с возможностью оценки разности фаз по полученным значениям сигналов I и Q, обработанных фазовыми детекторами.
2. Устройство по п.1, в котором устройства дискретизации построены на цепочке D-триггеров.
3. Устройство по п.1, в котором вычислительное устройство определяет оценку разности фаз на основании предварительной калибровки устройства, компенсации ошибки формирования квадратур сигналов и компенсации влияния скважности импульсов сигналов x1(t) и x2(t) на результат измерения.
4. Устройство по п.3, в котором дополнительно вычисление разности фаз сигналов осуществляется с учетом отклонения детекторной характеристики фазовых детекторов от линейного вида в областях разности фаз 0º, 90º, 180º, 270º.
5. Устройство по п.1, в котором фазовые детекторы представляют собой элементы исключающее ИЛИ.
6. Устройство для измерения разности фаз между входными сигналами, содержащее
аналоговую систему фазовой автоподстройки частоты (АСФАПЧ), выполненную с возможностью подачи на вход первого входного сигнала x1(t) и формирования на его основании синфазного и квадратурного сигналов  и
и  , разность фаз между которыми равна 90°, передаваемых на вход первому и второму устройствам дискретизации;
, разность фаз между которыми равна 90°, передаваемых на вход первому и второму устройствам дискретизации;
первое устройство дискретизации, выполненное с возможностью получения из синфазного сигнала  цифрового сигнала и его передачи в фазовый детектор;
цифрового сигнала и его передачи в фазовый детектор;
второе устройство дискретизации, выполненное с возможностью получения из квадратурного сигнала  цифрового сигнала
цифрового сигнала  и его передачи в фазовый детектор;
и его передачи в фазовый детектор;
третье устройство дискретизации, выполненное с возможностью получения из второго входного сигнала x2(t) цифрового сигнала x2[k] и его передачи в фазовые детекторы;
фазовые детекторы, выполненные с возможностью формирования сигналов I и Q, пропорциональных разности фаз между квадратурными цифровыми сигналами и и вторым цифровым сигналом x2[k], получаемыми на входы фазовых детекторов;
сумматоры-накопители Σ, выполненные с возможностью выделения постоянной составляющей сигналов I и Q на выходах фазовых детекторов;
счетчик N состояний, выполненный с возможностью счета тактовых импульсов измерения фаз сигналов и сброса через N тактов времени из его состояния в нулевое значение и выдачи импульса окончания измерения;
вычислительное устройство, выполненное с возможностью оценки разности фаз по полученным значениям сигналов I и Q, обработанных фазовыми детекторами.
7. Устройство по п.6, в котором устройства дискретизации построены на цепочке D-триггеров.
8. Устройство по п.6, в котором вычислительное устройство определяет оценку разности фаз на основании предварительной калибровки устройства, компенсации ошибки формирования квадратур сигналов, и компенсации влияния скважности импульсов сигналов x1(t) и x2(t) на результат измерения.
9. Устройство по п.8, в котором дополнительно вычисление разности фаз сигналов осуществляется с учетом отклонения детекторной характеристики фазовых детекторов от линейного вида в областях разности фаз 0 º, 90 º, 180 º, 270 º.
10. Устройство по п.6, в котором фазовые детекторы представляют собой элементы исключающее ИЛИ.
11. Способ измерения разности фаз между входными сигналами с помощью устройства по любому из пп. 1-5, содержащий этапы, на которых:
получают из первого входного сигнала x1(t) первый цифровой сигнал x1[t];
получают из второго входного сигнала x2(t) второй цифровой сигнал x2[k];
формируют опорный сигнала на основании первого цифрового сигнала x1[k], причем опорный сигнал состоит из двух квадратурных цифровых сигналов и , разность фаз между которыми близка к 90º;
формируют сигналы I и Q, пропорциональные разности фаз между квадратурными цифровыми сигналами и и вторым цифровым сигналом x2[k];
выделяют постоянную составляющую сигналов I и Q;
оценивают разность фаз по полученным значениям сигналов I и Q.
12. Способ измерения разности фаз между входными сигналами с помощью устройства по любому из пп. 6-10, содержащий этапы, на которых:
получают первый входной сигнал x1(t) и формируют на его основании синфазный и квадратурный сигналы и , разность фаз между которыми близка к 90°;
получают из синфазного сигнала цифровой сигнал ;
получают из квадратурного сигнала цифровой сигнал ;
получают второй входной сигнал x2(t) и формируют на его основании цифровой сигнал x2[k];
формируют сигналы I и Q, пропорциональные разности фаз между квадратурными цифровыми сигналами и и цифровым сигналом x2[k];
выделяют постоянную составляющую сигналов I и Q;
оценивают разность фаз по полученным значениям сигналов I и Q.
| Способ измерения разности фаз и отношения уровней двух гармонических сигналов | 2016 |
|
RU2618046C1 |
| US 6392494 B2, 21.05.2002 | |||
| Способ определения сдвига фаз | 1989 |
|
SU1663572A1 |
| US 6628276 B1, 30.09.2003 | |||
| WO 1999018691 A1, 15.04.1999. | |||

