Изобретение относится к навигационным устройствам, в частности может быть использовано устройствами для определения направления на географический север.
Достаточно актуальной задачей современного этапа развития техники является проблема точной привязки различных измерительных и навигационных систем к истинному направлению на географический север. Актуальность задачи высокоточного определения истинного азимута подчеркивается целым рядом практических применений в ориентировании, навигации, решении задач целеуказания и определения направления на объект, высокоточной ориентации систем связи, геодезии и др.
Традиционным способом определения азимута является измерение направления с помощью магнитного компаса, с учетом (или без) магнитного склонения местности. Несмотря на то, что указанный метод известен давно, несоответствие магнитного и географического полюсов, наличие магнитных аномалий или намагниченных объектов вблизи, делает применение компаса для определения направления на географический север недостаточно точным, для решения обозначенных задач.
Решение задачи позиционирования и определения направления движения в ряде случаев может быть достигнуто с помощью современных спутниковых систем, таких как GPS/ГЛОНАС. Однако, данные методы, основанные на внешних сигналах, по определению не являются автономными, что может иметь решающее значение для некоторых областей применения, например для решении навигационных задач подводных аппаратов или позиционировании в закрытых или подземных объектах, кроме того, для достижения высокой точности определения направлений необходима проведение измерений в нескольких удаленных друг от друга точках, а также применение высокоточных приемников сигнала, обеспечивающих малую погрешность в определении координат каждой точки.
Современные методы высокоточного определения ориентации включают широкое применение различных гирокомпасных устройств [1]. Тем не менее, использование высокоточных гирокомпасов с точностью определения азимутального направления лучше, чем 0,5°, существенно ограничено их стоимостью, потребляющими и массогабаритными параметрами.
Альтернативным сложившемуся тренду на развитие различных гироскопических систем для решения задачи определения направления может служить автономный метод поиска азимута объекта, основанный на нахождении вектора угловой скорости вращения Земли посредством измерения сил Кориолиса с помощью линейного акселерометра, вращающегося вокруг некоторой оси, параллельной оси чувствительности этого акселерометра [2]. Вместе с тем, точность данного метода невелика в силу малости сил Кориолиса по сравнению с типичным внешним шумовым вибрационным фоном.
Другим, более привлекательным вариантом с точки зрения технической реализации и достижимости высокой точности определения направления географического севера, может служить известный метод, основанный на непосредственном определении вектора угловой скорости вращения Земли 

Метод компенсации ошибок, обусловленных наклоном оси вращения платформы, приведенный в заявке [13], является прототипом предлагаемого технического решения. В этом методе, дополнительно к датчику угловых движений на вращающуюся платформу устанавливают датчик, чувствительный к наклонам, показания которого учитываются при обработке выходных сигналов датчика угловой скорости. Однако, при этом не учитываются ошибки, связанные с нестабильностью во времени чувствительности датчиков угловых движений к действию линейных ускорений, в частности ускорения свободного падения. Кроме того, реализация данного метода осуществляется без учета времени установления стабилизации электродных токов в канале датчика угловых движений, сокращение которого является важным с точки зрения большинства практических приложений способа определения направления на географический север.
Задачей изобретения является создание способа определения направления на географический север, направленного на устранение упомянутых недостатков.
Изобретение позволяет определять направление на географический север с высокой точностью сопоставимой с точностью современных прецизионных гирокомпасов без специального высокоточного горизонтирования. Изобретение позволяет создавать устройства с малыми габаритами, малым энергопотреблением и малой массой изделия, и позволяет проводить измерения в сложных условиях, когда нет возможности использовать другие средства навигации. Применение предлагаемого метода позволяет компенсировать возмущение выходного сигнала устройства, вызванное изменением выходного сигнала датчика при изменении его ориентации по отношению к силе тяжести, что позволяет определять ориентацию на географический север без специальных условий горизонтирования с точностью, соответствующей современным гирокомпасам и гироскопическим устройствам и уменьшает время выполнения измерений. Заявляемое техническое решение позволяет сократить время определения направления на географический север при реализации способа в соответствии с изобретением за счет уменьшения интервала времени, необходимого для установления стабилизации электродных токов в канале датчика угловых скоростей.
Указанный технический результат достигается тем, что в способе определения направления на географический север, заключающемся в совместной обработке выходных сигналов молекулярно-электронного датчика угловой скорости и датчика наклона, установленных на единой платформе, способной вращаться с угловой скоростью, изменяющейся по знаку и абсолютной величине, при котором осуществляют вращение платформы последовательно против и по часовой стрелке с одинаковой по абсолютной величине угловой скоростью, а направление на географический север определяют из следующего уравнения:
(1+R2)sin(ϕ0-β0)-2Rsin(ε-ϕ0-β0)=0,
где R и ε - отношение амплитуд сигналов и разность фаз сигналов датчика угловых скоростей на частоте вращения при вращении против и по часовой стрелке,
φ0 - искомый угол, определяющий направление на географический север, относительно начального положения платформы,
β0 - угол, определяемый по показаниям датчика наклона согласно выражению:
β0=δ/2±π/2,
где δ - разность фаз сигналов датчика наклона при вращениях против и по часовой стрелке,
вращение платформы осуществляют с момента наступления стабилизации электродных токов неподвижного молекулярно-электронного датчика угловых скоростей, а для уменьшения времени стабилизации электродных токов предварительно механически перемешивают жидкость в канале датчика угловой скорости путем вибраций платформы или помещают в жидкости вне области расположения преобразующего элемента датчика угловой скорости дополнительные электроды, находящиеся при одинаковом электрическом потенциале. В качестве датчика наклона используют акселерометр или наклономер или датчик линейной скорости.
Коррекцию ошибок, связанных с чувствительностью датчика угловых движений к наклонам оси вращения, производят путем исключения сигналов, вызванных указанными наклонами с использованием двух серий экспериментов, состоящих из последовательного вращения платформы против и по часовой стрелке.
Сущность заявляемого способа определения направления на географический север поясняется графическими материалами.
На фиг. 1 показан пример экспериментальной установки для определения направления на географический север на основе молекулярно-электронных измерителей углового ускорения и установленного на ту же платформу датчика, чувствительного к изменениям угла наклона.
На фиг. 2 показан датчик угловых скоростей, закрепленный на подвижной платформе в соответствии, аналогично решению аналога [11] и введена система координат, ось Ζ которой направлена вдоль оси вращения платформы, ось X - перпендикулярно плоскости тороида, т.е. вдоль оси чувствительности датчика угловых движений. Ось Y дополняет систему координат до правой тройки, α - угол наклона оси вращения относительно вертикали, β - угол между плоскостью ΟΧΖ и плоскостью, содержащей ось Ζ и вектор g силы тяжести, γ - угол между OZ и направлением местного меридиана, φ - отсчитываемый против часовой стрелки угол между плоскостями ΟΧΖ и плоскостью (φ0 - соответствующий угол в начальный момент времени), содержащей вектор угловой скорости вращения Земли и ось ΟΖ, Ω - вектор скорости вращения Земли.
На фиг. 3 показаны примеры кривых установления межэлектродного тока в молекулярно-электронном датчике угловых скоростей после подачи потенциала на электроды. Синяя - кривая - неподвижная платформа, красная - вибрирующая с малой амплитудой платформа.
Способ может быть реализован на основе устройства для определения направления на географический север, которое содержит помимо датчика угловой скорости, установленного и приводимого в движение в соответствии с решением аналога [11], также датчик, чувствительный к изменению угла наклона, при помощи которого выполняется коррекция ошибок, связанных с чувствительностью датчика угловых движений к наклонам оси вращения. В свою очередь учет ошибок производится путем исключения сигналов, вызванных указанными наклонами с использованием показаний установленного на ту же платформу датчика, чувствительного к изменениям угла наклона из сигнала датчика угловых движений.
Определение направления на географический север с высокой точностью сопоставимой с точностью современных прецизионных гирокомпасов без специального высокоточного горизонтирования обеспечивается путем компенсации возмущения выходного сигнала устройства, вызванного изменением выходного сигнала датчика при изменении его ориентации по отношению к силе тяжести.
Одна из проблем, которая должна быть решена для эффективного использования молекулярно-электронных датчиков угловых движений для определения направления на географический север состоит в компенсации возмущений выходного сигнала, вызванных изменением выходного сигнала датчика при изменении его ориентации по отношению к силе тяжести. В описании к патенту [11] предлагается решение, связанное с точным выставлением оси вращения платформы по направлению местной вертикали. Действительно, в этом случае, вращение не приводит к изменению ориентации датчика по отношению к силе тяжести. Тем не менее, указанное решение не всегда может быть реализовано технически с необходимой точностью. Более того, в предлагаемом в патенте [11] устройстве не предусматривается каких-то приспособлений для контроля вертикальности оси вращения платформы и, при необходимости, коррекции ее положения. Определим, каким образом могут быть скорректированы ошибки, связанные с изменением его положения относительно силы тяжести, если ось вращения платформы не является вертикальной. Для этого рассмотрим Фиг. 2 датчик, вращающийся относительно одной из осей, расположенных в плоскости тороидального канала его корпуса. Введем систему координат, ось Z которой направим вдоль оси вращения платформы, ось X ориентируем перпендикулярно плоскости тороида, т.е. вдоль оси чувствительности датчика угловых движений. Ось Y дополняет систему координат до правой тройки. Введем следующие обозначения: α - угол наклона оси вращения относительно вертикали, β - угол между плоскостью OXZ и плоскостью, содержащей ось Z и вектор g силы тяжести. Тогда проекции вектора силы тяжести на оси выбранной системы координат составят:

Пусть, кроме того, γ - угол между OZ и направлением местного меридиана, φ - отсчитываемый против часовой стрелки угол между плоскостями OXZ и плоскостью, содержащей вектор угловой скорости вращения Земли и ось OZ. Тогда проекция угловой скорости вращения Земли Ω на ось чувствительности датчика составит:

Если бы жидкость в тороидальном канале датчика угловых движений была строго однородна, то момент сил инерции, создающих циркуляцию жидкости в канале, составил бы 

Коэффициенты Az, Ay учитывают неоднородность распределения плотности жидкости в канале тороида и вызванную этой неоднородностью чувствительность датчика к линейным ускорениям. В данном расчете указанные коэффициенты следует рассматривать как априорно неизвестные и подлежащие определению на основе экспериментальных данных.
Предположим, что платформа приходит во вращение против часовой стрелки с угловой скоростью ω. Тогда:

Здесь β0, ϕ0 - значения соответствующих углов в начальный момент времени t=0. Подставляем (1), (2), (4) в (3) и, сохраняя только слагаемые, зависящие от времени, получим:

Обозначим через W(ω) комплексный коэффициент преобразования момента сил М в выходной сигнал датчика. Используя (5), находим для выходного сигнала при вращении против часовой стрелки:

Здесь fE=mR2Ωωsinγ; fG=Aygsinα.
Аналогично, для вращения в противоположную сторону:

Вычисляя отношение (6) к (7), находим:

Здесь 


Учитываем, что G является действительной величиной, и получаем:


Таким образом, если бы было известно направление наклона оси вращения (угол β0 в нашем описании), то ошибку, связанную с отклонением оси вращения платформы от вертикали, можно было бы исключить и определить направление угловой скорости вращения Земли относительно начального положения платформы путем определения ϕ0 из уравнения (10).
В свою очередь, для определения угла β0 можно предложить следующий метод:
Одновременно с датчиком угловых скоростей на платформу помещается датчик, чувствительный к гравитации (углу наклона), например, акселерометр.
Пусть, для простоты, ось чувствительности указанного акселерометра направлена по оси OY, т.е. лежит в плоскости тороида. Тогда, измеряемые в эксперименте выходные сигналы акселерометра, при вращении против или по часовой стрелки, задаются следующими выражениями:

Для отношения выходных сигналов:

Отсюда:

что позволяет определить неизвестный угол β0, на основании экспериментально определенной величины δ. Совместное решений (10) и (14) позволяют найти, в частности ϕ0, т.е. направление на географический север, исключив ошибки, связанные с влиянием поля тяжести на выходной сигнал датчика угловых скоростей. Отметим, что выбор между знаками «+» и «-» в выражении (18) не влияет на результат.
Из приведенного анализа видно, что описанные методы и полученные математические выражения применимы только при условии, что коэффициенты fE, fG не изменяются в ходе измерений. При этом, коэффициент fG определяется характером распределением плотности жидкости в тороидальном канале преобразователя. В свою очередь, плотность жидкости зависит от распределения температуры и концентрации в рабочем канале. Как температура, так и концентрация зависят от времени, прошедшего после подачи напряжения между электродами преобразующего элемента.
С другой стороны, установление распределения плотности жидкости сопровождается изменением межэлектродного тока в преобразующем элементе. Типичную зависимость межэлектродного тока от времени иллюстрируют кривые, показанные на фиг. 3. Синяя кривая на фигуре 3 представляет установление межэлектродного тока в состоянии покоя, а для красной кривой платформа не вращается, однако вибрирует с небольшой амплитудой. Видно, что вибрации приводят к более быстрому установлению межэлектродного тока. В данном примере время стабилизации уменьшилось с 60000 сек до 30000 сек, т.е. в два раза. Стабилизация межэлектродного тока, измеренного в покое свидетельствует о завершении установления распределения концентрации и температуры в рабочем канале, а, следовательно, плотности рабочей жидкости. В свою очередь, это означает стабильность fE и fG и возможность использования представленного выше способа обработки данных.
Как видно из представленных кривых, время установления может оказаться весьма значительным. С точки зрения большинства практических приложений, это время должно быть существенно уменьшено. Возможными способами его уменьшения может быть перемешивание жидкости в канале преобразователя путем приложения вибраций к платформе, которое осуществляют в течение 5-60 минут, как это иллюстрирует фиг. 3. При этом, путем регулирования амплитуды вибраций, интенсивность перемешивания можно сделать значительно большей, а значит - существенно уменьшить время стабилизации.
Другой способ выравнивания концентрации рабочей жидкости состоит в размещения дополнительных электродов, находящихся при одинаковом потенциале, в рабочем канале преобразователя. Механизм выравнивания концентрации состоит в том, что на электродах происходит обратимая электрохимическая реакция

Преимущественное направление реакции зависит, при фиксированном потенциале электрода от концентрации участвующих в реакции компонентов. В тех областях жидкости, примыкающих к электродам, где концентрация активного компонента 
Источники информации.
1. Ю.А. Лукомский, В.Г. Пешехонов, Д.А. Скороходов, Навигация и управление движением судов. СПб.: "Элмор", 2002. 360 с.
2. J. Reiner, M. Naroditsky, Patent No US 6502055 B1, G06F 15/00.
3. D.H. Titterton, J.L. Weston, "Strapdown inertial navigation technology", ISBN 0863412602, IEE Publishing, England.
4. Б. Блажнов, Л. Нестерюк, В. Пешехонов, Л. Старосельцев, ЭЛЕКТРОНИКА: Наука, технология, Бизнес, 5/2001, С. 56-59.
5. В.А. Козлов, Успехи современной радиоэлектроники, №5-6, 2004, С. 138-144.
6. Сафонов М.В., Агафонов В.М., Козлов В.А. Перспективы применения молекулярно-электронных сенсоров вращательного движения в различных научно-технических областях // Системные проблемы надежности, качества, информационных и электронных технологий / Материалы X Международной конференции и Российской научной школы. Часть 1. - М.: Радио и связь, 2005, С. 108.
7. Козлов В.А., Сафонов М.В. и др. "Молекулярно-электронное устройство для измерения угловых движений", патент РФ на изобретение №2324946, заявка №2005130308/28(033961), 2005.
8. Зайцев Д.Л., Козлов В.А., Сафонов М.В. и др. "Способ изготовления электродного узла молекулярно-электронного измерителя линейных и угловых движений с низким уровнем собственных шумов", Заявка на патент №2006131449/280(034193), 2006.
9. Бугаев А.С., Сафонов М.В. "Молекулярно-электронное устройство для измерения механических движений", патент РФ на полезную модель №82 862 U1, заявка №2008144490/22, 2008.
10. Зайцев Д.Л., Егоров Е.В., Егоров И.В. "Создание новой элементной базы для инерциальной навигации на основе молекулярно-электронной технологии" // Материалы Всероссийской конференции аспирантов и студентов "Индустрия наносистем и материалы", г. Зеленоград, 2006 г. С. 105-109.
11. Патент РФ на полезную модель №89895 «Устройство для определения направления на географический север», авторы: Агафонов В.М., Бугаев А.С., Зайцев Д.Л., Сафонов М.В., заявка №2009130794, опубл. 20.12.2009.
12. Патент US 2007095124.
13. Заявка №2012112374 от 02.04.2012 Способ определения направления на географический север с использованием сигнала молекулярно-электронного датчика угловых движений и компенсацией ошибок, связанных с влиянием линейных ускорений, авторы Агафонов В.М., Антонов А.Н., Зайцев Д.Л.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения направления на географический север | 2015 |
|
RU2606673C1 |
| НЕМАГНИТНОЕ ИЗМЕРЕНИЕ АЗИМУТА С ИСПОЛЬЗОВАНИЕМ МЕТ ЭЛЕКТРОХИМИЧЕСКИХ ДАТЧИКОВ | 2010 |
|
RU2539123C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ПОДВИЖНОГО ОБЪЕКТА | 2018 |
|
RU2697859C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА ПОДВИЖНОГО ОБЪЕКТА | 2017 |
|
RU2671937C1 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| Способ повышения точности калибровки блока микромеханических датчиков угловой скорости | 2019 |
|
RU2727344C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОЕКЦИЙ ВЕКТОРА УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ЗЕМЛИ ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТА СТВОЛА СКВАЖИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1994 |
|
RU2085730C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ДИНАМИЧЕСКИЙ ГИРОКОМПАС | 2020 |
|
RU2754964C1 |
| Способ калибровки прецизионных датчиков угловой скорости с учетом годичной угловой орбитальной скорости вращения Земли | 2023 |
|
RU2810893C1 |
| Способ повышения точности калибровки масштабных коэффициентов и углов неортогональности осей чувствительности блока датчиков ДУС | 2019 |
|
RU2718142C1 |


Изобретение относится к навигационным устройствам, в частности может быть использовано для определения направления на географический север. Техническим результатом изобретения является повышение точности определения направления на географический север. Технический результат достигается за счет того, что устройство для определения направления на географический север, содержит помимо датчика углового движения также датчик, чувствительный к изменению угла наклона. Обработка сигналов производится путем исключения из сигнала датчика угловых движений сигналов, вызванных наклонами оси вращения, с использованием показаний установленного на ту же платформу датчика, чувствительного к изменениям угла наклона. Момент начала вращения платформы определяют из условия стабилизации электродных токов неподвижного молекулярно-электронного датчика. Для уменьшения времени стабилизации электродных токов предварительно механически перемешивают жидкость в канале датчика угловой скорости путем вибраций платформы или помещают в жидкости вне области расположения преобразующего элемента датчика угловой скорости дополнительные электроды, находящиеся при одинаковом электрическом потенциале. 3 з.п. ф-лы, 3 ил.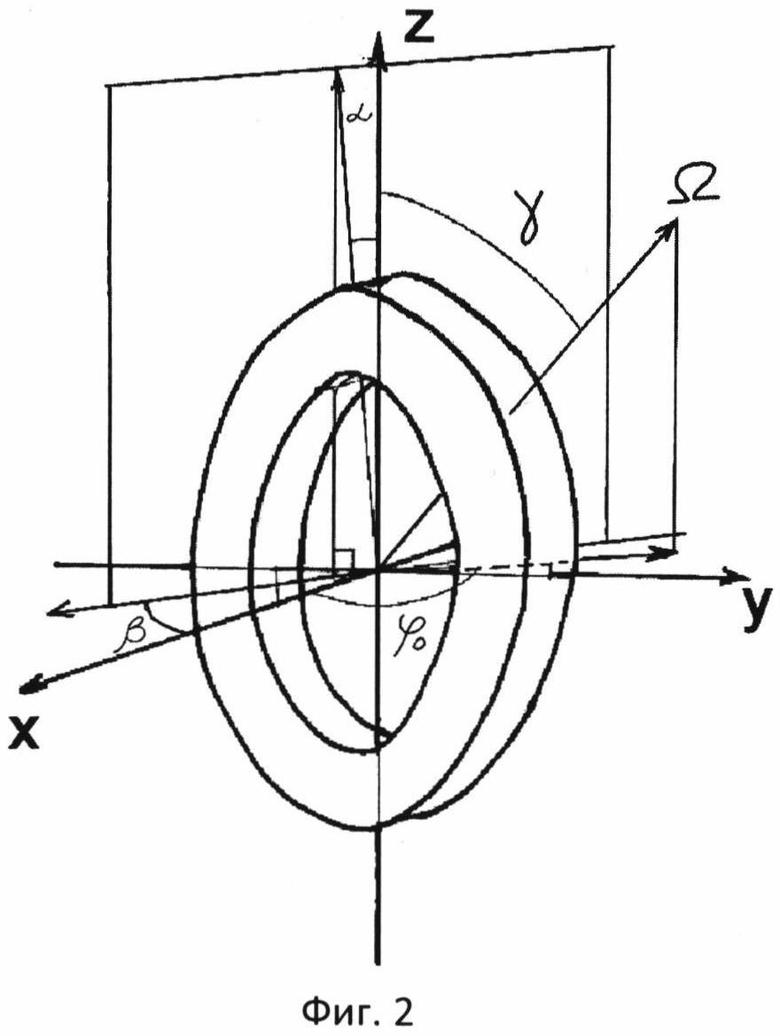
1. Способ определения направления на географический север, заключающийся в совместной обработке выходных сигналов молекулярно-электронного датчика угловой скорости и датчика наклона, установленных на единой платформе, способной вращаться с угловой скоростью, изменяющейся по знаку и абсолютной величине, при котором осуществляют вращение платформы последовательно против и по часовой стрелке с одинаковой по абсолютной величине угловой скоростью, а направление на географический север определяют из следующего уравнения:
(1+R2)sin(ϕ0-β0)-2Rsin(ε-ϕ0-β0)=0,
где R и ε - отношение амплитуд сигналов и разность фаз сигналов датчика угловых скоростей на частоте вращения при вращении против и по часовой стрелке,
φ0 - искомый угол, определяющий направление на географический север, относительно начального положения платформы,
β0 - угол, определяемый по показаниям датчика наклона согласно выражению:
β0=δ/2±π/2,
где δ - разность фаз сигналов датчика наклона при вращениях против и по часовой стрелке,
отличающийся тем, что вращение платформы осуществляют с момента наступления стабилизации электродных токов неподвижного молекулярно-электронного датчика угловых скоростей, причем предварительно механически перемешивают жидкость в канале датчика угловой скорости путем вибраций платформы или помещают в жидкости вне области расположения преобразующего элемента датчика угловой скорости дополнительные электроды, находящиеся при одинаковом электрическом потенциале.
2. Способ по п. 1, отличающийся тем, что в качестве датчика наклона используют акселерометр.
3. Способ по п. 1, отличающийся тем, что в качестве датчика наклона используют наклономер.
4. Способ по п. 1, отличающийся тем, что в качестве датчика наклона используют датчик линейной скорости.
| Устройство для предварительной смазки двигателя внутреннего сгорания | 1950 |
|
SU89895A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА С ПОМОЩЬЮ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2340875C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА В НАПРАВЛЕНИИ ГЕОГРАФИЧЕСКОГО СЕВЕРА ПРИ ПОМОЩИ ИНЕРЦИАЛЬНОГО СЧЕТЧИКА ТЕКУЩИХ КООРДИНАТ | 2009 |
|
RU2463558C1 |
| US 6502055 В1, 31.12.2002. | |||

