Изобретение относится к области навигации, а более конкретно, к способу определения широты и направления на географический полюс и устройству для его осуществления на поверхности Земли, под водой, под поверхностью Земли. Работа устройства полностью автономна, так как основана на регистрации стационарного векторного поля ускорений Кориолиса Земли. Данное физическое поле существует в любой точке объема Земли. Работа устройства основана на силовом векторном воздействии поля ускорений Кориолиса вращающейся Земли на массу жидкой среды в объеме резонатора, в котором создана векторная возвратно-поступательная деформация среды, что соответствует волновому процессу, характеризуемому направлением и скоростью, продольных акустических волн, однозначно связанных со средой и геометрией резонатора. Преобразование двух этих векторов по закону векторного произведения, регистрируемого при угловом сканировании пространства резонатором, позволяет определить направление на географический полюс и вычислить широту места.
Уровень техники, позволяющий использовать физические параметры Земли для навигации, включает устройства, основанные на регистрации векторов магнитного поля, силы тяжести, дополняемые различными неинерциальными системами. К ним относятся механические гироскопы, оптические - лазерный гироскоп и оптоволоконный гироскоп, основанные на эффекте Саньяка, твердотельные волновые гироскопы, в работе которых используется эффект существования волнового процесса в инерциальной системе координат, поворотно-чувствительные устройства, использующие колеблющиеся массы, датчики угловой скорости, основанные на Кориолисовых силах с использованием акустических волн (Naser El-Sheimy, Ahmed Youssef Inertial sensors technologies for navigation applications: state of the art and future trends (Review) https://satellite-navigation.springeropen.com/, v. 1-2, p. 1-21, 2020 https://doi.org/10.1186/s43020-019-0001-5)).
Известен «Геокомпас высоких широт» (В.А. Шульгин Письма в ЖТФ, 2022, том 48, вып. 11, с. 21-23). В работе рассмотрена автономная навигационная система ориентации на поверхности, под водой, под поверхностью Земли. Устройство геокомпаса, содержащее акустический резонатор, расположенный на устройстве углового сканирования пространства, электроакустический и акустоэлектрические преобразователи, генератор, возбуждающий акустические колебания в среде резонатора, на массу которой осуществляется силовое воздействие векторного поля ускорений Кориолиса вращающейся Земли, зависящее от угла между вектором ускорения Кориолиса и вектором скорости акустических возвратно-поступательных движений массы, коллинеарных вектору распространения акустических колебаний среды резонатора, по закону векторного произведения формирующего на выходах акустоэлектрических преобразователей сигналы, фиксируемые для каждого угла поворота резонатора при угловом сканировании пространства вектором направления акустических колебаний, по значениям последовательности полученных данных формирующее диаграмму направленности и осуществляющее пассивную пеленгацию оси вращения Земли по направлению экстремума диаграммы.
Недостаток данного техническом решения в том, что для регистрации взаимодействия векторных полей, резонатор выполнен в виде пластины из плавленого кварца. Выяснилось, что в процессе сканирования пространства и соответствующего изменения положения пластины по отношению к вектору силы тяжести, возникают изменения внутренних напряжений в пластине. Деформации искажают акустическое поле резонатора, что влияет на результаты измерений. Возбуждаемые в твердом теле одновременно продольные и поперечные волны, распространяющиеся с разной скоростью звука, усложняют структуру поля. Это затрудняет интерпретацию получаемых данных. Из-за малых уровней детектируемого сигнала по методу измерения амплитудных значений синхронным детектированием двух разнесенных датчиков, результат измерений подвержен значительному временному и температурному дрейфу, диаграмма направленности в области экстремума имеет малую кривизну, что ограничивает точность измерений.
Наиболее близким по совокупности существенных признаков к изобретению является «Способ навигации по вектору сил Кориолиса Земли и устройство для его осуществления» (RU 2775858, опубликовано: 11.07.2022 Бюл. №20). Способ определения широты и направления на географический полюс, включающий регистрацию вектора поля ускорений Кориолиса Земли датчиком, расположенным на устройстве углового сканирования пространства, регистрирующим изменение векторного произведения между вектором поля ускорений Кориолиса Земли и вектором скорости движения массы среды в объеме резонатора датчика, в котором возбуждены резонансные акустические колебания.
Недостаток способа в представлении результата, соответствующего максимальным значениям векторного произведения, определяющим ортогональное направление на ось вращения Земли («Правило Жуковского»). Сформированная таким способом диаграмма направленности имеет малую кривизну в точке экстремума, что не позволяет получить высокую точность измерений направления на ось вращения Земли. Недостатком способа также является обработка данных в спектральной области, что приводит к малой скорости выполнения вычислений.
Основным результатом главного изобретения является способ, согласно которому выполняют регистрацию последовательности значений векторного произведения при угловом сканировании пространства датчиком в плоскостях, содержащих отвесную линию, до определения меридионального сечения, в плоскости которого лежат отвесная линия и, наклонная к ней, ось вращения Земли, соответствующего нулевому значению векторного произведения, тем самым определяют направление на географический полюс и, по углу сканера, определяют широту места.
Преимуществом данного способа сканирования является тот факт, что векторное произведение равно нулю при параллельности двух векторов - псевдовектора скорости вращения Земли и вектора скорости частиц в среде резонатора. При угловом сканировании по двум осям, снижение разности фаз, переход через ноль и скачок на π в вариациях переменной составляющей разности фаз, обусловленных силой Кориолиса в векторном произведении и соответствующих экстремуму диаграммы направленности, свидетельствующих тому, что выбрана искомая меридиональная плоскость, содержащая ось вращения Земли и определяющая направление на полюс, а также определен тот угол между отвесной линией и осью, который является дополнением до π широты места.
Технический результат главного изобретения достигается тем, что в способе определения широты и направления на географический полюс, вектор ускорения Кориолиса соответствует векторному произведению

где Ω - псевдовектор угловой скорости вращения Земли; V - вектор скорости частиц среды. В случае продольных волн этот вектор коллинеарен направлению распространения акустической волны в резонаторе. Абсолютное значение вектора ускорения

где α - угол между Ω и V. Модуль ускорения ас максимален в ортогональном направлении к оси вращения, когда в точке экстремума sinα=1. Для sinα=0, |ас|=0 и этой точке соответствует острый минимум. Для параллельных векторов векторное произведение равно нулю. Это иллюстрируется точкой смыкания соседних ветвей двух циклоид (М.Я. Выгодский Справочник по высшей математике М., 1965, С. 317, Черт. 248).
Наиболее близким по совокупности существенных признаков к изобретению в части устройства, реализующего способ, является «Способ навигации по вектору сил Кориолиса Земли и устройство для его осуществления» (RU 2775858, опубликовано: 11.07.2022 Бюл. №20). Устройство, определяющее широту и направление на географический полюс, содержащее акустический резонатор, расположенный на устройстве углового сканирования пространства, электроакустический и акустоэлектрические преобразователи, генератор, возбуждающий акустические колебания в среде резонатора, на массу которой осуществляется силовое воздействие векторного поля ускорений Кориолиса вращающейся Земли, зависящее от угла между вектором ускорения Кориолиса и вектором скорости акустических возвратно - поступательных движений массы, коллинеарных вектору распространения акустических колебаний среды резонатора, по закону векторного произведения формирующего на выходах акустоэлектрических преобразователей сигналы, фиксируемые для каждого угла поворота резонатора при угловом сканировании пространства вектором направления акустических колебаний, по значениям последовательности полученных данных формирующее диаграмму направленности и осуществляющее пассивную пеленгацию оси вращения Земли по направлению экстремума диаграммы.
Недостаток устройства в том, что в качестве среды, заполняющей резонатор, был использован газ, имеющий малую удельную массу m единицы объема, и сила F воздействующая на массу среды

составляла малый уровень регистрируемого значения векторного произведения. Вследствие этого резонатор имел значительную длину ~1 метра.
Результат изобретения в части устройства для осуществлении предложенного способа состоит в том, что в качестве среды, заполняющей резонатор, используется жидкость, в которой возбуждаются акустические колебания генератором, подключенным к наклеенному на грань прямоугольного резонатора входу пьезоэлектрического преобразователя, формирующего продольные волны на частоте резонанса, а наклеенные на боковые грани пьезоэлектрические преобразователи выходами подключены к анализатору, регистрирующему, при угловом сканировании по двум осям, снижение разности фаз, переход через ноль и скачок на π в вариациях переменной составляющей разности фаз, обусловленных силой Кориолиса в векторном произведении и соответствующих экстремуму диаграммы направленности, свидетельствующих тому, что выбрана искомая меридиональная плоскость, содержащая ось вращения Земли и определяющая направление на полюс, а также тот угол между отвесной линией и осью, который является дополнением до π широты места.
Преимущества устройства данного изобретения состоят в том, что результирующая сила (3), действующая на приемные преобразователи при использовании конденсированной среды, существенно увеличивается из-за увеличения удельной массы m. Кроме того, в жидкости, на относительно низких частотах, возбуждаются только продольные волны, что упрощает обработку результатов векторного произведения (2). Это позволило применить фазовый метод регистрации вектора ас (1), который в меньшей степени подвержен влиянию изменений амплитуды, но, в этом случае, предъявляется высокие требования к временной когерентности сигнала генератора. Вектор поля ускорения Кориолиса Земли имеет направление, касательное к окружности с центром на оси вращения Земли, плоскость которой ортогональна к этой оси (правило Жуковского). Вследствие этого, при угловом сканировании резонатором меридиональной плоскости, после прохождения состояния параллельности векторов Ω||V, ас меняет направление на π. В (4) этому соответствует инверсия знака фазы (2πf+φ1-φ2).

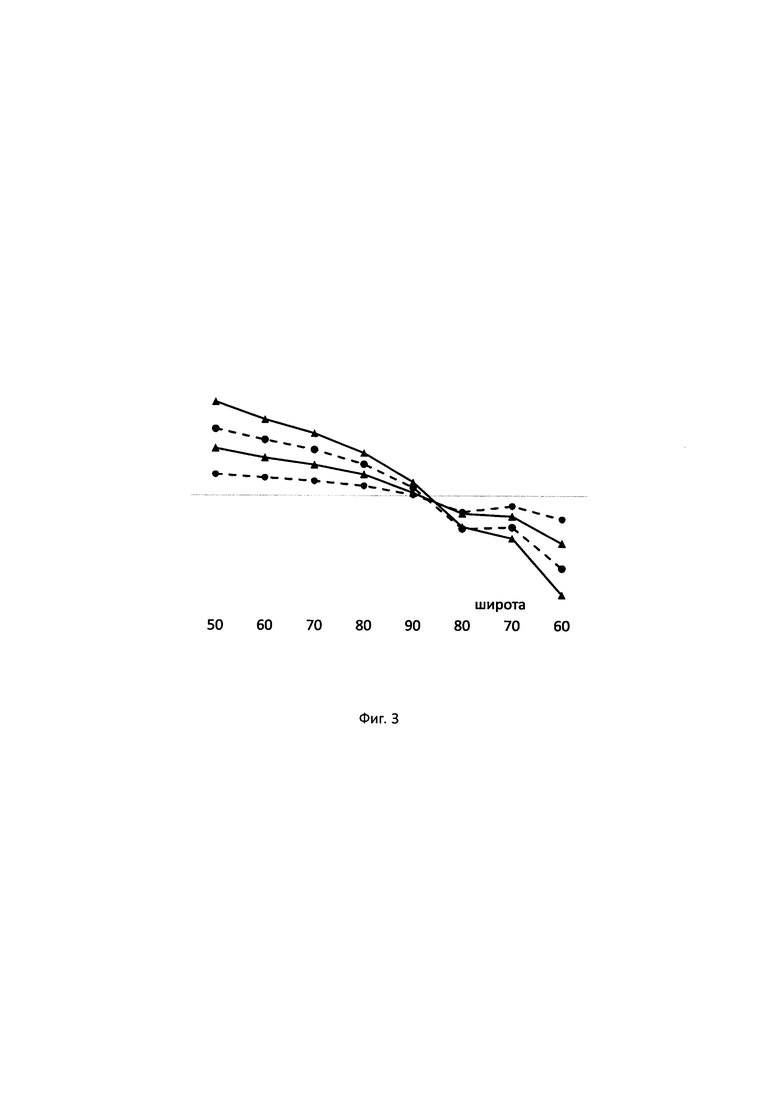
где А - амплитуда акустического колебания в среде резонатора с частотой f, φ1 и φ2 - переменные составляющие фазы принимаемого пьезопреобразователями сигнала. Скачок фазы означает инверсию направления на ось вращения Земли при переходе через полюс, что следует из «правила Жуковского», дающего описание преобразованию векторов векторного произведения. Этот процесс наблюдался при проведении эксперимента. Соответствующие графики сканов представлены на фиг. 3.
Сущность изобретения поясняется рисунками, представленными на фиг. 1, фиг. 2, фиг. 3, фиг. 4.
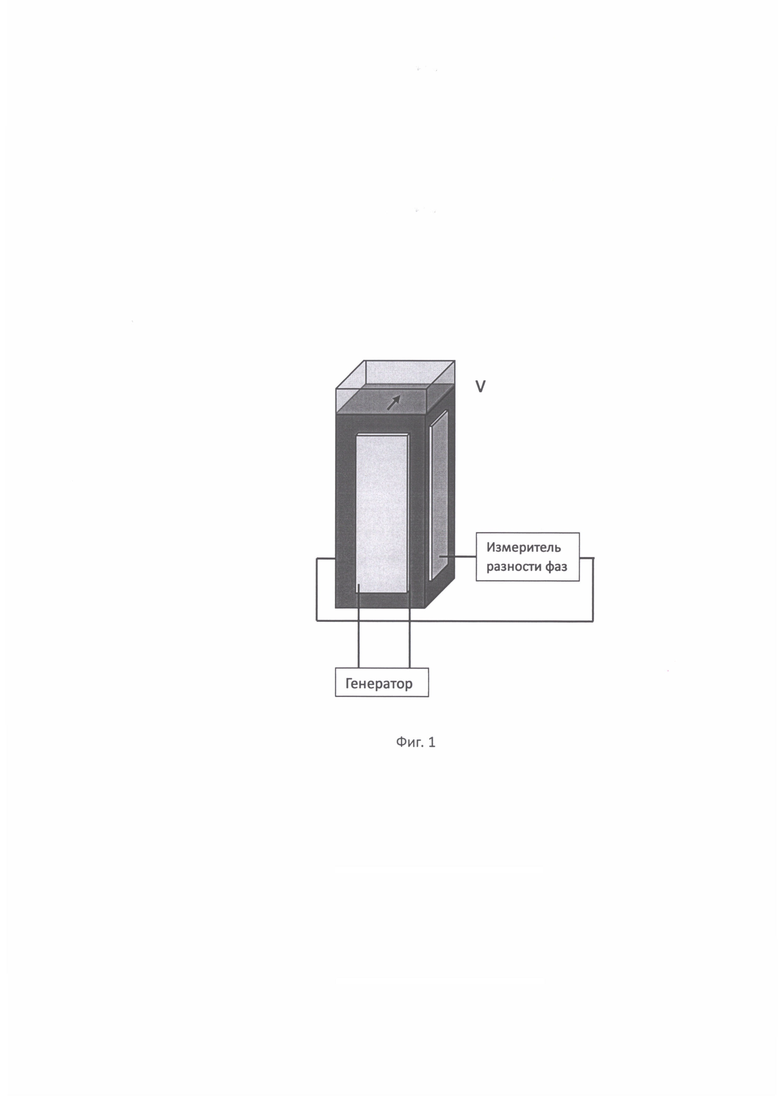
На фиг. 1 представлен рисунок акустического резонатора датчика ускорений Кориолиса ас. Кварцевая кювета для спектральных исследований (Starna Cells, Inc; Catalog Number: 23-Q-10) содержит пьезопреобразователь подключенный к генератору, возбуждающему продольную ультразвуковую стоячую волну в жидкости. Два пьезопреобразователя расположены на противолежащих сторонах кюветы для регистрации векторного произведения векторов ас и V в режиме измерения разности фаз. Разность фаз между сигналами датчиков является информацией о направлении ориентации датчика относительно векторного поля ускорений Кориолиса Земли. Датчик заполнен ртутью, объем датчика 4 мл.
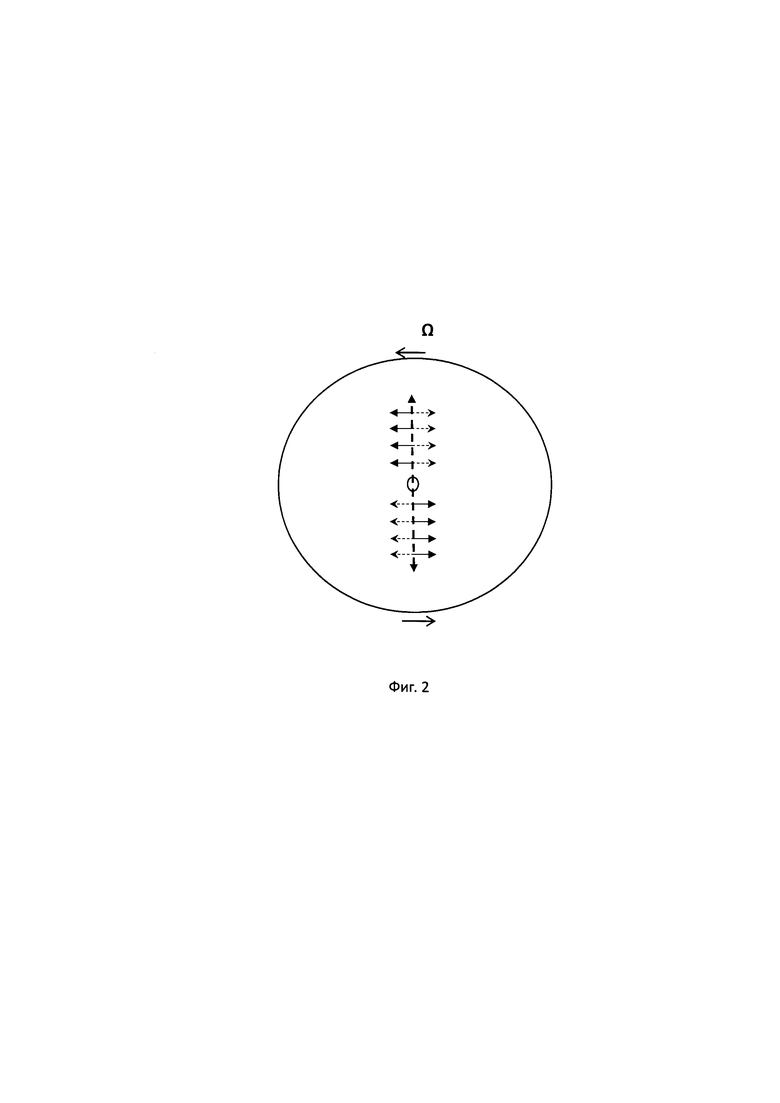
На фиг. 2 представлено распределение сил Кориолиса, действующих на конденсированную среду резонатора датчика при вариациях угла сканирования в меридиональной плоскости в области северного географического полюса. Положительным и отрицательным полупериодам акустических колебаний на рисунке соответствуют разные виды векторов ас, векторы являются касательными к окружностям, ортогональным псевдовектору Ω с центром на оси вращения Земли.
На фиг. 3 представлено изображение тренда двух, последовательных во времени, измерений фаз датчиков сканера, иллюстрирующих поиск меридионального сечения, для которого ось вращения Земли лежит в плоскости данного сечения. Из графиков следует, что точкой инверсии фаз является географический полюс.
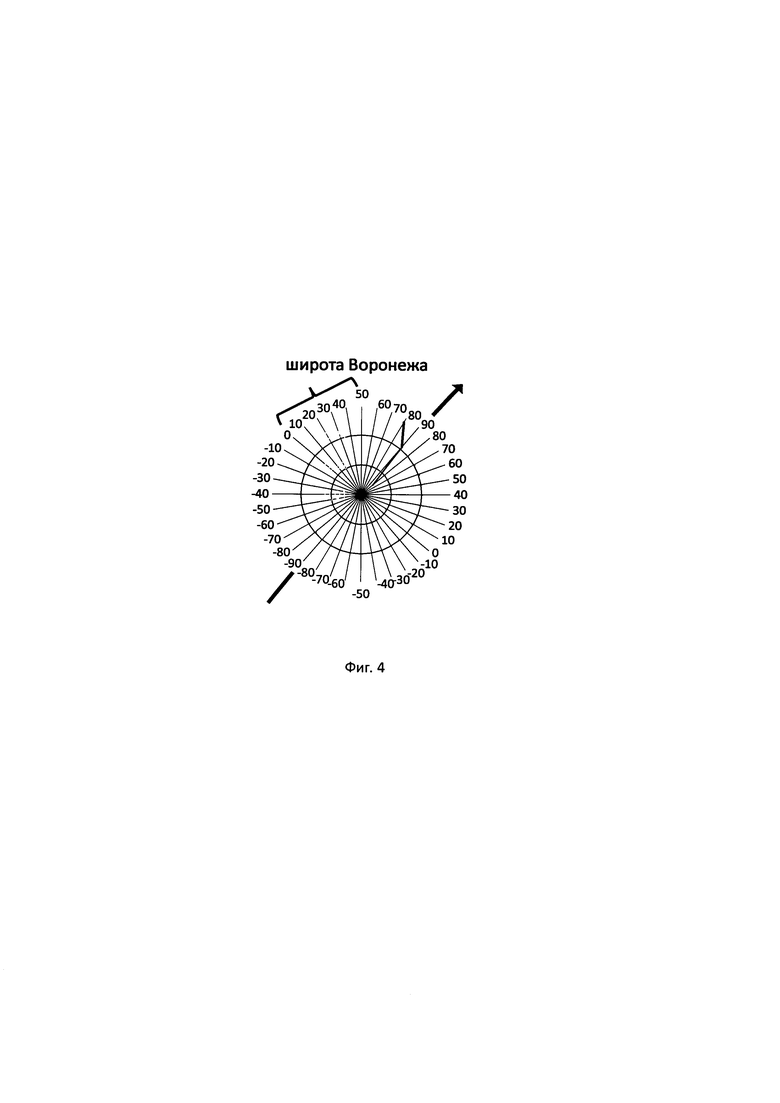
На фиг. 4 представлен результат сканирования датчиком меридиональной плоскости Земли, содержащей ось вращения Земли и отвесную линию на широте места. Сканирование вектором V диапазона широт 80-90-80 позволяет зафиксировать угол сканера, соответствующий минимальному значению векторного произведения ас (1). Из рисунка следует, что широте места соответствует угол 90°-α.
Для осуществления изобретения был создан макет датчика, регистрирующего изменения векторного произведения двух векторов - вектора поля ускорений Кориолиса Земли, осуществляющего силовое воздействие на массу жидкости в резонаторе, и второго вектора - вектора знакопеременных деформаций, генерируемого в резонаторе акустического поля. Таким образом, постоянное стабильное поле ускорений Кориолиса Земли, нестабильность которого определяется только колебаниями величины угловой скорости Ω вращения Земли, модулировалось по частоте в результате выполнения векторного произведения. Известно, что очень малые узкополосные сигналы, с известной частотой, могут быть выделены на фоне больших помех, превышающих уровень сигнала. Предлагаемые в данном исследовании способ и устройство для его осуществления, в части обработки измерений, относятся к этой области.
Закрытый резонатор - кювета, заполненная жидкостью, в частности ртутью, была закреплена без напряжений, создающих деформацию, в теплоизолирующем контейнере. Термостатирование, с точностью Δt~0,1° осуществлялось за счет вариаций температуры циркулирующего в контейнере воздуха. Для генерации акустических колебаний на частоте резонанса использовался синтезатор частот синхронного усилителя RS7265. Фазовые измерения выполнялись вычислительным блоком осциллографа высокого разрешения (12 бит) HDO4054. Разрешение механики углового сканера ограничивалось величиной Δα~1° дуги. При поиске минимума векторного произведения в меридиональной плоскости, крутизна диаграммы направленности в окрестности географического полюса для фазовых измерений, составила 10 m % дуги изменения разности фаз (φ1-φ2) (4) по шкале измерителя HDO4054 на 1° дуги сканирования пространства. Таким образом, в эксперименте было достигнута точность определения широты и направления на географический полюс ~1° дуги. Для каждой регистрируемой точки диаграммы направленности возникает время установления нового значения разности фаз при изменении положения резонатора. Задержка обусловлена существованием волнового процесса в инерциальной системе координат. Для нового направления угла α возбуждается новое акустическое поле, соответствующее данной ориентации резонатора, а прежнее затухает за время, характерное для жизни данного состояния. На это требовалось время ~40 с. Время накопления и статистического усреднения установившегося значения разности фаз составляло величину ~20 с. Измерения проводились на частоте резонанса 8,285 кГц.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИИ ПО ВЕКТОРУ СИЛ КОРИОЛИСА ЗЕМЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2775858C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2392626C1 |
| ОДНОЧАСТОТНЫЙ ГЕНЕРАТОР ДЛЯ АНАЛИЗА ЖИДКИХ СРЕД | 2006 |
|
RU2343474C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2387998C1 |
| СПОСОБ УСТАНОВКИ БАЛАНСИРНОГО СТАНКА-КАЧАЛКИ ДЛЯ МЕХАНИЧЕСКОГО ПРИВОДА ШТАНГОВОГО СКВАЖИННОГО НАСОСА | 2013 |
|
RU2532644C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ (ВАРИАНТЫ) | 2007 |
|
RU2359275C1 |
| ЭЛЕКТРОННЫЙ ГИРОСКОП | 2007 |
|
RU2357212C1 |
| СПОСОБ ЭЛЕКТРОННОГО ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ (ВАРИАНТЫ) | 2007 |
|
RU2359276C1 |
| ДАТЧИК МАССОВОГО РАСХОДА НА ОСНОВЕ ЭФФЕКТА КОРИОЛИСА (ВАРИАНТЫ) | 2001 |
|
RU2277227C2 |
| ДАТЧИК МАССОВОГО РАСХОДА НА ОСНОВЕ ЭФФЕКТА КОРИОЛИСА | 2000 |
|
RU2272257C2 |
Группа изобретений относится к области навигации. Сущность способа состоит в том, что возбуждают акустические колебания генератором, подключенным ко входу пьезоэлектрического преобразователя, формируют пьезоэлектрическим преобразователем продольные волны на частоте резонанса, регистрируют при сканировании пространства датчиком по двум осям снижение разности фаз последовательности значений векторного произведения, переход через ноль, скачок на π в вариациях переменной составляющей разности фаз, обусловленных силой Кориолиса в векторном произведении и соответствующих экстремуму диаграммы направленности, по которой определяют меридиональную плоскость и лежащее в этой плоскости направление на географический полюс, а широту места - как угол между лежащей в этой плоскости отвесной линией и осью вращения Земли. Сущность устройства заключается в том, что возбуждающий колебания генератор подключен ко входу пьезоэлектрического преобразователя, выходы которого подключены к анализатору; при этом в качестве среды резонатора используется жидкость. Техническим результатом является возможность автономного определения местоположения подвижного объекта. 2 н.п. ф-лы, 4 ил.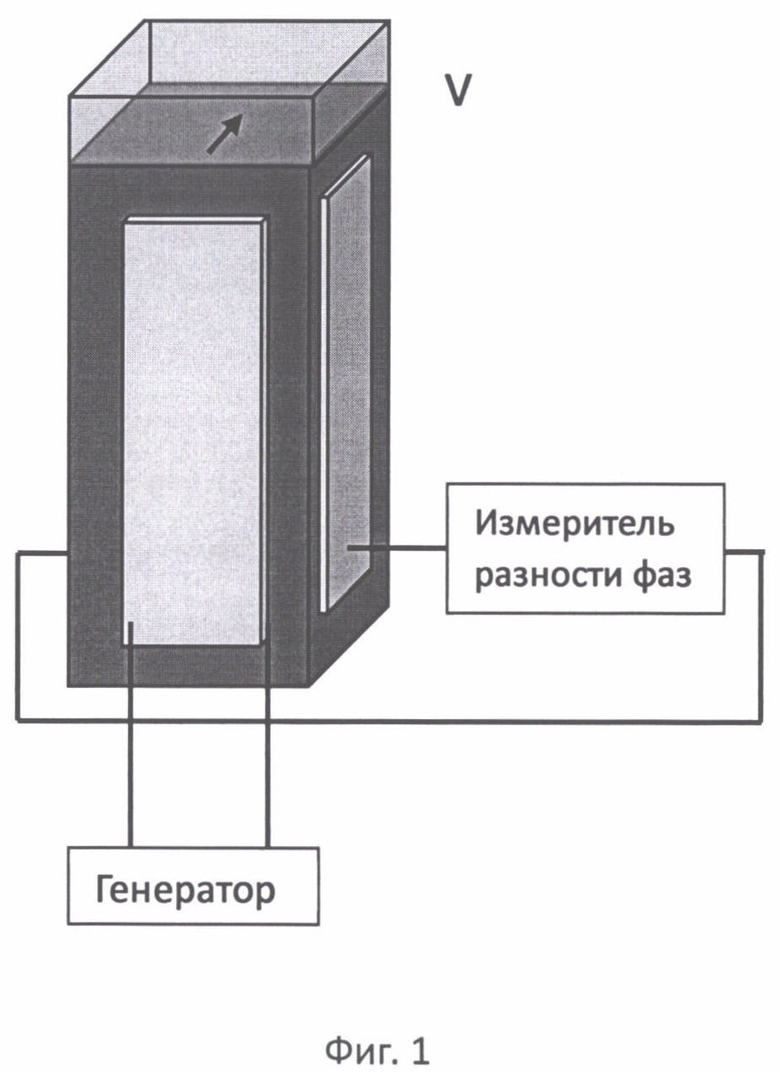
1. Способ определения широты и направления на географический полюс, включающий регистрацию вектора поля ускорений Кориолиса Земли посредством резонатора, расположенного на устройстве углового сканирования пространства и регистрирующего изменение векторного произведения между вектором поля ускорений Кориолиса Земли и вектором скорости движения массы в объеме резонатора, в котором возбуждены резонансные акустические колебания, отличающийся тем, что возбуждают акустические колебания генератором, подключенным ко входу пьезоэлектрического преобразователя, наклеенного на грань прямоугольного резонатора, формируют посредством пьезоэлектрического преобразователя продольные волны на частоте резонанса, регистрируют при угловом сканировании пространства датчиком по двум осям снижение разности фаз последовательности значений векторного произведения, переход через ноль, скачок на π в вариациях переменной составляющей разности фаз, обусловленных силой Кориолиса в векторном произведении и соответствующих экстремуму диаграммы направленности, по которой определяют меридиональную плоскость, на которой расположена отвесная линия и наклонная к ней ось вращения Земли, определяют лежащее в меридиональной плоскости направление на географический полюс, определяют широту места как угол между лежащей в меридиональной плоскости отвесной линией и осью вращения Земли.
2. Устройство определения широты и направления на географический полюс, содержащее резонатор, расположенный на устройстве углового сканирования пространства, электроакустический и акустоэлектрический преобразователи, генератор, возбуждающий акустические колебания в среде резонатора, формирующего по закону векторного произведения на выходах акустоэлектрических преобразователей сигналы, фиксируемые для каждого угла поворота резонатора при угловом сканировании пространства, формирующее по значениям последовательности полученных данных диаграмму направленности и осуществляющее пассивную пеленгацию оси вращения Земли по направлению экстремума диаграммы направленности, отличающееся тем, что возбуждающий акустические колебания генератор подключен ко входу пьезоэлектрического преобразователя, формирующего продольные волны на частоте резонанса и наклеенного на грань прямоугольного резонатора, при этом пьезоэлектрические преобразователи выходами подключены к анализатору, регистрирующему при угловом сканировании по двум осям снижение разности фаз последовательности значений векторного произведения, переход через ноль, скачок на π в вариациях переменной составляющей разности фаз, обусловленных силой Кориолиса в векторном произведении и соответствующих экстремуму диаграммы направленности, определяющей меридиональную плоскость, содержащую ось вращения Земли и определяющую направление на географический полюс, а также определяющей широту места как угол между лежащей в меридиональной плоскости отвесной линией и осью вращения Земли, при этом в качестве среды, заполняющей резонатор, используется жидкость.
| СПОСОБ НАВИГАЦИИ ПО ВЕКТОРУ СИЛ КОРИОЛИСА ЗЕМЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2775858C2 |
| Устройство для предварительной смазки двигателя внутреннего сгорания | 1950 |
|
SU89895A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| DE 10362031 B4, 29.05.2008 | |||
| US 6502055 B1, 31.12.2002. | |||

