Настоящее изобретение относится к автономному внесению средств защиты растений с помощью дрона. Объектами настоящего изобретения являются способ и беспилотный летательный аппарат, предназначенные для внесения средства защиты растений с учетом явлений сноса. Кроме того, объектом настоящего изобретения является компьютерный программный продукт, который можно использовать для управления способом в соответствии с изобретением.
Автоматизация уже давно вошла в сферу сельского хозяйства. Автономные сельскохозяйственные машины выполняют полевые работы; автономные летательные аппараты (дроны) изучают характеристики поля и осуществляют внесение средств защиты растений (см., например, US 2014303814 A1, WO 2015/161352 A2).
При использовании дронов для внесения средства защиты растений, существует риск того, что в результате ветра средство защиты растений распределится неравномерно. Неравномерное распределение является неблагоприятным, так как недостаточное количество средства защиты растений может означать недостаточное действие и/или привести к развитию устойчивости к используемому средству защиты растений. С другой стороны, чрезмерное внесение средства защиты растений может вызывать повреждение растений или нарушать правовые или нормативные требования. Вполне возможно, что в пределах поля или рядом с полем находятся защищенные зоны, которые не должны вступать в контакт со средством защиты растений. Из-за ветра существует риск того, что при внесении с помощью дрона средство защиты растений попадет в такие зоны.
Объекты независимых пунктов 1, 9 и 10 направлены на решение указанных проблем.
Таким образом, первым объектом настоящего изобретения является способ внесения средства защиты растений на поле с помощью автономного летательного аппарата (дрона), включающий стадии:
- составления цифровой аппликационной карты для поля, в которой для отдельных участков поверхности поля указывают количества средства защиты растений, которые подлежат внесению,
- облета полем автономным летательным аппаратом по маршруту и внесения средства защиты растений через по меньшей мере одну форсунку,
- определения пространственного распределения средства защиты растений во время внесения,
- согласования параметров внесения средства защиты растений с определенным пространственным распределением так, чтобы внесение средства защиты растений на участки поля происходило в соответствии с цифровой аппликационной картой,
причем во время процесса внесения цифровую аппликационную карту постоянно обновляют.
Другим объектом настоящего изобретения является беспилотный летательный аппарат для внесения средства защиты растений на поле, на котором выращивают культурные растения, включающий
- резервуар для средства защиты растений,
- по меньшей мере одну форсунку для выдачи средства защиты растений над полем,
- средство подачи для подачи средства защиты растений из резервуара в направлении по меньшей мере одной форсунки,
- запоминающее устройство для хранения цифровой аппликационной карты, в которой для отдельных участков поверхности поля указаны количества средства защиты растений, которые подлежат внесению,
- блок управления, который сконфигурирован таким образом, что он выполняет маневрирование летательным аппаратом по маршруту над полем и, при этом, побуждает средство подачи вносить средство защиты растений на поле через по меньшей мере одну форсунку, в соответствии с цифровой аппликационной картой, во время пролета беспилотного летательного аппарата над полем,
- причем блок управления, во время внесения средства защиты растений, получает информацию о пространственном распределении внесенного средства защиты растений и согласует параметры внесения, если пространственное распределение приводит к отклонению внесенных количеств от данных цифровой аппликационной карты,
- причем блок управления содержит модель, способную вычислять пространственное распределение средства защиты растений, выпускаемого через по меньшей мере одну форсунку, при меняющихся параметрах внесения и сноса, или коммуникативно связан с внешним стационарным компьютером, на котором реализована такая модель.
Другим объектом настоящего изобретения является носитель данных с хранящимся на нем программным кодом, загружаемым в оперативное запоминающее устройство компьютера или блока управления и обеспечивающим выполнение компьютером или блоком управления следующих этапов:
- считывание цифровой аппликационной карты, в которой для отдельных участков поверхности поля указаны количества средства защиты растений, которые подлежат внесению, причем во время процесса внесения цифровую аппликационную карту постоянно обновляют,
- управление дроном для внесения на поле средства защиты растений в соответствии с цифровой аппликационной картой,
- определение сноса во время внесения средства защиты растений,
- согласование параметров внесения и/или параметров полета и/или маршрута таким образом, чтобы снос уменьшался или был сведен к минимуму.
В дальнейшем изобретение пояснено более подробно, без различия между отдельными объектами изобретения (способ, дрон, компьютерный программный продукт). Скорее, нижеследующие пояснения должны быть применены аналогичным образом ко всем объектам изобретения, независимо от контекста, в котором они появляются (способ, дрон, компьютерный программный продукт).
В первой стадии способа в соответствии с изобретением для поля, на котором выращивают или будут расти культурные растения, составляют цифровую аппликационную карту.
Под понятием "поле" понимают пространственно разграниченную область земной поверхности, которую предпочтительно используют для ведения сельского хозяйства путем выращивания, обеспечения питательными веществами и сбора культурных растений на таком поле. На одном поле можно выращивать один сорт культурного растения; однако, также можно выращивать различные сорта одного культурного растения и/или различные культурные растения. Однако также возможно, что поле может включать одну или несколько областей, в которых культурные растения не выращивают и/или не должны выращиваться.
Под понятием "культурное растение" понимают растение, которое благодаря вмешательству человека целенаправленно культивируют в качестве полезного или декоративного растения.
Цифровая аппликационная карта является цифровым представлением поля или части поля. В аппликационной карте указывают, на какие участки поверхности поля, какие количества одного или нескольких выбранных средств защиты растений должны быть внесены, например, для предотвращения распространения вредных организмов и/или для борьбы с вредными организмами.
Термин "цифровой" означает, что снимок может быть обработан машиной, как правило, компьютерной системой. Под "обработкой" понимают известные способы электронной обработки данных (EDP).
Под понятием "средство защиты растений" следует понимать средство, предназначенное для защиты растений или продуктов растений от вредных организмов или для предотвращения их воздействия, для уничтожения нежелательных растения или частей растений, для подавления нежелательного роста растений или для предотвращения такого роста, и/или для воздействия на жизненные процессы растений другим образом, чем питательные вещества (например, регуляторы роста).
Примерами средств защиты растений являются гербициды, фунгициды и пестициды (например, инсектициды).
Средство защиты растений обычно содержит действующее вещество или несколько действующих веществ. "Действующие вещества" представляют собой вещества, оказывающие определенное действие на организм, и вызывают специфическую реакцию. Обычно средство защиты растений содержит носитель для разбавления одного или нескольких действующих веществ. Наряду с этим возможно наличие добавок, таких как консерванты, буферные растворы, красящие вещества и тому подобное. Средство защиты растений может находиться в твердом, жидком или газообразном состоянии.
Регуляторы роста служат, например, для повышения устойчивости злаковых культур к полеганию путем укорочения длины стебля (укорачивающие стебель вещества или же лучше укорачивающие междоузлия вещества), для улучшения укоренения черенков, уменьшения высоты растений путем укорочения в садоводстве, или для предотвращения прорастания картофеля. Обычно они представляют собой фитогормоны или их синтетические аналоги.
Под понятием "вредный организм" или же кратко "вредитель" понимают организм, который может появиться при выращивании сельскохозяйственных культур и повреждать культурное растение, оказывать негативное влияние на урожай культурного растения или конкурировать с культурным растением за природные ресурсы. Примерами таких вредных организмов являются бурьяны, сорные травы, злаковые сорняки, животные вредители, такие как, например, жуки, гусеницы и черви, грибы и патогенные микроорганизмы (например, бактерии и вирусы). Хотя вирусы не относятся к организмам с биологической точки зрения, тем не менее, в данном случае они должны подпадать под понятие "вредный организм".
Под понятием "бурьян" (во множественном числе: бурьяны) понимают растения самопроизвольно появляющейся сопутствующей растительности в насаждениях культурных растений, лугах или садах, которые там специально не выращивают, и которые появляются, например, из семенного потенциала почвы, или из семян, которые переносятся по воздуху. В прямом смысле это понятие не ограничивается только травянистыми растениями, а также охватывает травы, папоротники, мхи или древесные растения.
В области защиты растений понятие "сорная трава" (во множественном числе: сорные травы) часто используют для разъяснения различия между травянистыми растениями. В данном тексте, понятие "бурьян" используют в качестве общего понятия, которое предназначено охватывать сорную траву, если только оно не относится к конкретным бурьянам или сорным травам.
Сообразно этому, в контексте настоящего изобретения сорные травы и бурьяны являются растениями, которые встречаются при выращивании целевого культурного растения как сопутствующие. Так как они конкурируют с культурным растением за ресурсы, то они являются нежелательными и поэтому с ними нужно вести борьбу.
В принципе, также возможно применять настоящее изобретение для внесения в поле одного или нескольких питательных веществ.
Понятие "питательные вещества" относится к тем неорганическим и органическим соединениям, из которых растения могут извлекать элементы, из которых состоит их организм. Также часто сами эти элементы называют питательными веществами. В зависимости от местоположения растений, питательные вещества поглощаются ими из воздуха, воды и почвы. При этом в большинстве случаев они являются простыми неорганическими соединениями, такими как вода (Н2О) и диоксид углерода (СО2), а также ионами, такими как нитрат (NO3), фосфат (РО43-) и калий (K+). Доступность питательных веществ является различной. Она зависит от химических свойств питательного вещества и условий окружающей среды. Поскольку питательные элементы необходимы в определенном массовом соотношении, то в большинстве случаев доступность элемента ограничивает рост растений. Если этот элемент поступает, то и рост усиливается. Наряду с основными элементами органических веществ (С, О, Н, N и Р), жизненно важными по-прежнему являются K, S, Са, Mg, Mo, Cu, Zn, Fe, В, Mn, Cl у высших растений, Со, Ni. Азот можно вносить, например, в виде нитрата, аммония или аминокислоты. В некоторых случаях Na+ может быть использован в качестве функциональной замены для К+.
Способы составления цифровых аппликационных карт описаны, например, в GB 2447681 A, US 6199000, US 2009/0132132 А1 и WO 00/23937.
Обычно для составления цифровой аппликационной карты, прежде всего, определяют потребность обработки поля или некоторых участков поверхности поля средством защиты растений.
Потребность в обработке может быть связана, например, с заражением вредителями, которое угрожает или может произойти. К примеру, вполне допустимо, что перед внесением семян культурного растения находящиеся в поле бурьяны должны быть удалены. Также возможно, что сорняки появились в поле после посева, и должны быть удалены. Кроме того, можно допустить, что часть возделываемых культурных растений или все культуры поражены возбудителями болезней или грибком. Также возможно, что животный вредитель распространился в поле. К тому же весьма вероятно, что существует угроза распространения заражения вредителями.
Определение потребности преимущественно осуществляют путем использования датчиков в и/или над полем. Пригодными датчиками являются, например, датчики дистанционного зондирования. Посредством датчиков дистанционного зондирования создаются цифровые изображения участков земной поверхности, может быть получена информация о преобладающей там растительности и/или превалирующих условиях окружающей среды (см., например, М. S. Moran и др.: Opportunities and Limitations for Image-Based Remote Sensing in Precision Crop Management, Remote Sensing of Environment (1997) 61: 319-346).
Данные этих датчиков (данные дистанционного зондирования) получают из интерфейсов, предоставляемых поставщиком, и могут включать в себя наборы электромагнитных данных различных этапов обработки.
Вместо или в дополнение к данным дистанционного зондирования, информация для определения потребностей также может быть получена с помощью датчиков, расположенных в поле. В качестве примера следует назвать датчики LiDAR для обнаружения летающих вредителей, или датчики, которые предоставляют сведения о различиях в стадиях/условиях роста (например, N-датчик от компании Yara или GreenSeeker от компании Trimble).
С целью определения необходимости также возможно применять модели прогнозирования, например, для прогноза поражения вредителями. Такие модели прогнозирования подробно описаны в предшествующем уровне техники, а также имеются в продаже. Система поддержки принятия решения proPlant Expert для прогноза использует данные о выращиваемой культуре (стадия развития, условия роста, меры относительно защиты растений), о погодных условиях (температура, продолжительность солнечного дня, скорость ветра, осадки), а также данные об известных вредителях/болезнях (экономические предельные уровни, нагрузка вредителя/болезни) и, на основе этих данных, рассчитывает риск поражения (Newe М., Meier Н., Johnen A., Volk Т.: proPlant expert.com - an online consultation system on crop protection in cereals, rape, potatoes and sugarbeet. EPPO Bulletin 2003, 33, 443-449; Johnen A., Williams I.H., Nilsson C, Klukowski Z., Luik A., Ulber В.: The proPlant Decision Support System: Phenological Models for the Major Pests of Oilseed Rape and Their Key Parasitoids in Europe, Biocontrol-Based Integrated Management of Oilseed Rape Pests (2010) Ed.: Ingrid H. Williams. Tartu 51014, Estonia. ISBN 978-90-481-3982-8. cc. 381 -403; www.proPlantexpert.com).
Определение потребности преимущественно осуществляют на конкретном участке поверхности. Вообще потребность обработки средством защиты растений не является одинаковой по всему полю, а варьируется. Как правило, заражение вредителями сначала происходит в одном или нескольких местах, и оттуда распространяется. Поэтому обычно бывает так, что для некоторых участков поверхности в пределах одного поля требуется более высокая степень обработки средством защиты растений, в то время как в других участках потребность в них меньше или возможно вообще отсутствует.
После преимущественного определения потребности на конкретном участке поверхности, обычно определяют необходимое количество средства защиты растений.
Необходимое количество может зависеть, например, от степени заражения вредными организмами. Допустимо планировать обработку средством защиты растений только для тех участков поверхности, где превышен порог повреждения. Кроме того, можно предположить, что необходимое количество средства защиты растений зависит от стадии роста растения, которое подлежит обработке.
Но также возможно, что в поле или рядом с полем имеются защищенные зоны, в которых применение средства защиты растений должно быть исключено.
Следовательно, при определении потребностей предпочтительно принимать во внимание установленные законами и/или нормативные предельные значения. Кроме того, наряду с максимальными количествами, которые могут быть внесены, также задают минимальные количества, которые следует применять, чтобы избежать, например, развития устойчивости.
При определении необходимых количеств, также можно принимать во внимание количества средств защиты растений, которые уже были внесены в прошлом.
Также допустимо перед началом внесения средства защиты растений определять необходимые количества приблизительно, а во время полета над полем с помощью датчика(-ов) на дроне определять фактически необходимые количества для конкретной поверхности участка (уточнение).
Помимо этого, необходимые количества можно определять с помощью датчика(-ов) на дроне лишь во время пролета над полем.
После определения необходимых количеств составляют цифровую аппликационную карту, в которой подлежащие внесению количества средства защиты растений зафиксированы в соответствии с определенными необходимыми количествами. В настоящей заявке эту цифровую аппликационную карту также называют "первоначальной аппликационной картой". При этом первоначальную аппликационную карту можно согласовывать с местными окружающими условиями во время внесения средства защиты растений.
Цифровая аппликационная карта может быть загружена в накопитель цифровых данных беспилотного летательного аппарата. Беспилотный летательный аппарат (БЛА) представляет собой летательный аппарат, который можно приводить в движение и вести автономно посредством компьютера или с земли с помощью пульта дистанционного управления без экипажа на борту. В настоящем описании понятия "автономный летательный аппарат" и "дрон" используют в качестве синонимов термина "беспилотный летательный аппарат". Предпочтительно дроном в соответствии с изобретением управляют и ведут его автономно с помощью находящегося на борту компьютера. Для этой цели дрон в соответствии с изобретением имеет систему определения местоположения, предпочтительно спутниковую систему определения местоположения. Система глобального позиционирования (GPS), официально NAVSTAR GPS, представляет собой пример глобальной навигационной спутниковой системы для определения местоположения.
Кроме того, дрон в соответствии с изобретением имеет резервуар для приема средства защиты растений, по меньшей мере одну форсунку, а также средство для подачи средства защиты растений из резервуара в направлении по меньшей мере одной форсунки. Через по меньшей мере одну форсунку вносят средство защиты растений, т.е. сбрасывают над полем.
Дрон в соответствии с изобретением пролетает над полем. Соответствующее положение дрона фиксируется с помощью системы определения местоположения. Кроме того, с цифровой аппликационной карты определяется соответствующее определенному положению количество средства защиты растений. Соответствующее количество сбрасывается посредством блока управления.
Может произойти так, что во время пролета дрона над полем и выдачи средства защиты растений через по меньшей мере одну форсунку средство защиты растений не осядет там, где оно должно осесть в соответствии с первоначальной цифровой аппликационной картой. Может случиться и так, что средство защиты растений из-за ветра по меньшей мере частично окажется на других участках.
Под понятием "снос" следует понимать все те эффекты, которые приводят к тому, что средство защиты растений, выдаваемое через по меньшей мере одну форсунку, не оседает там, где оно должно осесть. В предпочтительном варианте осуществления причиной сноса является ветер.
Под понятием "потери вследствие сноса" понимают долю вносимого количества средства защиты растений, которая, во время внесения не оседает там, где это предусмотрено в соответствии с первоначальной цифровой аппликационной картой.
В соответствии с изобретением во время пролета дрона над полем и при внесении средства защиты растений определяется пространственное распределение средства защиты растений.
Например, возможно, что один или несколько датчиков ветра на дроне и/или в поле измеряют скорость ветра и направление ветра. При помощи модели рассчитывается каким образом средство защиты растений, распыляемое через по меньшей мере одну форсунку, распределяется в пространстве под воздействием ветра и силы тяжести при падении, и какие количества попадают на поле в конкретный участок поверхности (количество на единицу площади).
При этом является допустимым, что (вместо или в дополнение к одному или нескольким датчикам ветра) в поле имеются датчики количества, которые улавливают часть средства защиты растений, распыляемого дроном, и определяют количество для конкретного участка поверхности. Предпочтительно указанные датчики количества находятся в коммуникативном соединении с дроном, так что они могут установить положение дрона. Зная положение дрона во время внесения, пространственное распределение средства защиты растений во время внесения можно рассчитать исходя из количества, предназначенного для конкретного участка в поле.
Предпочтительно, во время полета дрона над полем и во время внесения средства защиты растений составляется цифровая карта распределения, в которой фиксируются соответствующие количества средств защиты растений, которые осели на отдельных участки поверхности. В то время, как первоначальная аппликационная карта представляет расчетное состояние, цифровая же карта распределения, представляет собой, так сказать, фактическое состояние. Расхождение между расчетным состоянием (первоначальная цифровая аппликационная карта) и фактическим состоянием (цифровая карта распределения) вызвано сносом.
Чтобы приблизиться к расчетному состоянию, параметры внесения приводят в соответствие с преобладающим сносом.
В предпочтительном варианте осуществления фиксируют потери вследствие сноса, и первоначальную аппликационную карту обновляют соответственно потерям вследствие сноса. В результате сноса количества средства защиты растений оседают на участках поверхности, которые, в соответствии с текущим маршрутом дрона (еще) не должны быть опрысканы средством защиты растений. Тем не менее, возможно, что они будут опрысканы в соответствии с текущим маршрутом в более поздний срок. Однако, поскольку, определенное количество средства защиты растений уже попало в эти участки поверхности (утраченное количество вследствие сноса), то количество, которое еще предстоит внести, соответственно уменьшается. Это означает, что в (первоначальной) аппликационной карте соответствующее количество потерь вследствие сноса вычитают из количества, которое подлежит внесению на соответствующие участки поверхности. Соответственно, во время последующего пролета дрона над соответствующим участком поверхности, будет внесено меньшее количество средства защиты растений. И наоборот, на некоторых участках поверхности вследствие явлений сноса осядет меньшее количество средства защиты растений, нежели предусмотрено первоначальной аппликационной картой. Поэтому принимают меры для компенсации этого недостающего количества, например, путем согласования параметров внесения во время внесения средства защиты растений и/или путем изменения маршрута.
Кроме того, и другие параметры внесения могут быть согласованы соответственно преобладающему сносу. Например, также можно согласовать маршрут дрона. Если первоначальный маршрут проходит в непосредственной близости от защищенной зоны, в которой не должно быть произведено внесение, и если во время внесения фиксируется сильный ветер, из-за которого существует риск того, что средство защиты растений в результате сноса попадет на защищенную зону, то маршрут может быть согласован так, чтобы средство защиты растений больше не могло попасть на защищенную зону. Расстояние маршрута от защищенной зоны может быть увеличено. Кроме того, может быть снижена высота полета дрона.
Другими параметрами внесения, которые могут быть согласованы в соответствии с преобладающим сносом, являются, например, количество форсунок, через которые подается средство защиты растений, расположение форсунок, давление перед по меньшей мере одной форсункой, скорость полета дрона, высота полета и другие.
Дрон в соответствии с изобретением имеет блок управления, выполняющий различные задачи. Вполне возможно, что вместо единственного блока управления, могут присутствовать несколько блоков управления, на которые распределены различные задачи. С целью упрощения в настоящей заявке речь идет только об одном блоке управления.
Одна из задач блока управления состоит в выполнении маневрирования дрона по заранее заданному маршруту. Маршрут может быть зафиксирован в цифровой аппликационной карте; однако, также вполне допустимо, чтобы маршрут был составлен независимо от цифровой аппликационной карты и загружен в накопитель дрона отдельно. Также дроном можно управлять дистанционно, то есть он связан со стационарным блоком управления, который отслеживает соответствующее положение дрона и передает дрону указания относительно направления, в котором дрон должен двигаться.
Другая задача блока управления состоит в том, чтобы выдавать средство защиты растений в соответствии с цифровой аппликационной картой. Для этого цифровую аппликационную карту загружают в оперативное запоминающее устройство блока управления. Блок управления фиксирует положение дрона над полем и определяет количество средства защиты растений, подлежащее выдаче в соответствующем положении в соответствии с цифровой аппликационной картой. Блок управления побуждает средство подачи подавать в направлении форсунки соответствующее количество средства защиты растений. Средство защиты растений выпускается из дрона через форсунку и достигает поля.
Блок управления может быть также пригодным для определения сноса. Например, может быть допустимым, что дрон содержит один или несколько датчиков ветра, которые измеряют скорость, а также направление преобладающего ветра, и передают данные на блок управления. Также возможно, что блок управления получает информацию о преобладающем ветре от внешних стационарных датчиков ветра. Блок управления может содержать модель, способную вычислять пространственное распределение средства защиты растений, выпускаемое через по меньшей мере одну форсунку при меняющихся параметрах внесения и сноса. Однако, также вполне возможно, что такая модель реализована на внешнем стационарном компьютере, который коммуникативно связан с блоком управления дрона.
С помощью фактических параметров внесения и сноса модель определяет пространственное распределение выдаваемого через по меньшей мере одну форсунку средства защиты растений. Кроме того, рассчитывают распределение средства защиты растений по полю. Затем эту информацию можно вводить в цифровую карту распределения.
Используя модель, также преимущественно можно рассчитать, каким образом должны быть согласованы параметры внесения, чтобы компенсировать вызванные сносом эффекты.
После этого измененные параметры внесения будут применены соответствующим образом блоком управления, например, для управления дроном, средством подачи и/или форсункой, с тем, чтобы достичь состояния (расчетного состояния), предусмотренного в первоначальной цифровой аппликационной карте.
На Фигуре 1 схематически представлен предпочтительный порядок внесения средства защиты растений на поле с помощью дрона. Отдельные признаки, указанные на Фигуре или описанные со ссылкой на Фигуру, не ограничены представленной Фигурой, и их можно как угодно комбинировать с другими признаками из настоящего описания.
1. Предпочтительно, для конкретного участка поверхности поля определяют потребность в обработке средством защиты растений. Для этой цели могут быть применены модели, такие как, например, модели роста растений и/или модели прогнозирования заражения вредным организмом. В качестве альтернативы или в дополнение к указанному, можно осуществлять измерения, такие как, например, измерения датчиками, которые, к примеру, указывают поражение вредным организмом, измерения, которые предоставляют информацию о фактической стадии роста преобладающей в поле растительности и/или измерения условий окружающей среды (влажность почвы, погода и т.п.), которые указывают на неизбежное заражение вредным организмом.
2. В определение необходимого количества включают пороговые значения. Могут быть заданы верхние пороговые значения, например, так как имеется максимальное количество средства защиты растений, которое необходимо внести. При этом могут быть нижние пороговые значения, например, минимальное количество средства защиты растений, которое необходимо внести, чтобы предотвратить развитие устойчивости.
3. Определенные необходимые количества вводят при составлении (первоначальной) цифровой аппликационной карты. В аппликационной карте указано, какие количества средства защиты растений должны быть внесены на отдельные участки поверхности поля.
4. Внесение средства защиты растений осуществляют в соответствии с аппликационной картой, то есть дрон пролетает над полем и в тех местах, в которых он каждый раз находится, выпускает то количество средства защиты растений, которое указано в цифровой аппликационной карте для этого местоположения.
5. Во время внесения средства защиты растений, вносимое в каждом случае количество фиксируют. Более того, определяют, каким образом вносимое количество распределяется в пространстве во время внесения. Исходя из пространственного распределения, определяют, какие количества средства защиты растений и на какие участки поля оседают. С одной стороны эти определения основываются на измерениях, в частности, скорости ветра и направления ветра, которые отвечают за явление сноса, а с другой стороны, на моделировании пространственного распределения средства защиты растений, которое выдается через по меньшей мере одну форсунку дрона. Наряду со скоростью ветра и направлением ветра, в моделирование могут быть введены параметры внесения (такие как, например, количество, которое вносят за единицу времени, положение форсунки, количество форсунок, давление перед форсункой), а также высота полета и скорость полета дрона. Однако, также вполне допустимо использовать в поле датчики, которые собирают часть количеств внесенного средства защиты растений, как только они оседают на поле.
Определенные благодаря моделированию и/или измерениям с помощью датчиков количества средства защиты растений, которые оседают на поле, сравнивают с количествами, зафиксированными в цифровой аппликационной карте. В случае вызванного сносом отклонения цифровая аппликационная карта может быть согласована, например, путем записи в аппликационной карте количеств, которые в результате сноса уже осели на участки поверхности, хотя в соответствии с фактическим маршрутом они еще не должны были осесть на участки поверхности (обновление). Помимо этого, вполне допустимо согласовать параметры внесения таким образом, чтобы дальнейшее внесение средства защиты растений происходило в соответствии с аппликационной картой (онлайн коррекция на снос).
| название | год | авторы | номер документа |
|---|---|---|---|
| Воздухоплавательный роботизированный аппарат для мониторинга и внесения средств защиты растений, удобрений в точном земледелии | 2019 |
|
RU2703198C1 |
| Комплекс летательных аппаратов для дифференцированного внесения жидких средств химизации | 2016 |
|
RU2622617C1 |
| Комплекс летательных аппаратов для внесения жидких средств химизации в точном земледелии | 2016 |
|
RU2617163C1 |
| Беспилотный вертолет для внесения пестицидов, удобрений и других агрохимикатов в точном земледелии | 2021 |
|
RU2754790C1 |
| Способ агрохимической обработки посевов | 2024 |
|
RU2838265C1 |
| Беспилотный летательный аппарат для внесения пестицидов в точном садоводстве | 2023 |
|
RU2793020C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Способ ультрамалообъемного опрыскивания сельскохозяйственных растений и устройство для его осуществления с использованием беспилотных авиационных средств вертолетного типа | 2019 |
|
RU2730640C1 |
| Способ внесения сыпучих средств защиты растений и комплекс для его осуществления | 2018 |
|
RU2694502C1 |
| АВТОЖИР ДЛЯ ДИФФЕРЕНЦИРОВАННОГО ВНЕСЕНИЯ ЖИДКИХ СРЕДСТВ ХИМИЗАЦИИ | 2014 |
|
RU2589801C1 |

Изобретение относится к автономному внесению средств защиты растений с помощью дрона. Объектами изобретения являются способ и БПЛА, предназначенные для внесения средства защиты растений с учетом явлений сноса. Составляют цифровую аппликационную карту для поля, в которой для отдельных участков поверхности поля указывают количества средства защиты растений, которые подлежат внесению. Осуществляют облет поля БПЛА по маршруту и внесения средства защиты растений через форсунку. Определяют пространственное распределение средства защиты растений во время внесения. Согласовывают параметры внесения средства защиты растений с определенным пространственным распределением, так что внесение средства защиты растений на участки поверхности поля осуществляют в соответствии с цифровой аппликационной картой. Во время процесса внесения цифровую аппликационную карту постоянно обновляют. БПЛА содержит резервуар для средства защиты растений, форсунку для выдачи средства защиты растений над полем, запоминающее устройство для хранения цифровой аппликационной карты, блок управления. Уменьшается снос или сводится к минимуму. 3 н. и 7 з.п. ф-лы, 1 ил.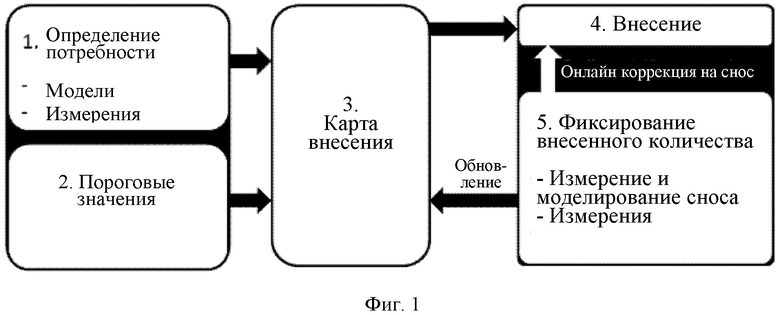
1. Способ внесения средства защиты растений на поле с помощью автономного летательного аппарата (дрона), включающий стадии:
- составления цифровой аппликационной карты для поля, в которой для отдельных участков поверхности поля указывают количества средства защиты растений, которые подлежат внесению,
- облета поля автономным летательным аппаратом по маршруту и внесения средства защиты растений через по меньшей мере одну форсунку,
- определения пространственного распределения средства защиты растений во время внесения,
- согласования параметров внесения средства защиты растений с определенным пространственным распределением, так что внесение средства защиты растений на участки поверхности поля осуществляют в соответствии с цифровой аппликационной картой,
причем во время процесса внесения цифровую аппликационную карту постоянно обновляют.
2. Способ по п. 1, отличающийся тем, что
скорость ветра и направление ветра, преобладающие во время внесения, фиксируют с помощью одного или нескольких датчиков ветра, и что
определяют количества средства защиты растений, которые под воздействием ветра оседают на тех участках поверхности поля, которые в соответствии с маршрутом и/или аппликационной картой не должны или еще не должны быть обработаны средством защиты растений.
3. Способ по одному из пп. 1 или 2, отличающийся тем, что часть внесенных количеств средства защиты растений собирают посредством одного или нескольких датчиков, и при этом с помощью собранного продукта определяют количества, которые оседают на те участки поверхности поля, которые в соответствии с маршрутом и/или аппликационной картой не должны или еще не должны быть обработаны средством защиты растений.
4. Способ по одному из пп. 1-3, отличающийся тем, что цифровую аппликационную карту обновляют во время внесения, посредством фиксирования в аппликационной карте тех количеств, которые оседают на те участки поля, которые в соответствии с маршрутом и аппликационной картой еще не должны быть обработаны средством защиты растений.
5. Способ по одному из пп. 1-4, отличающийся тем, что параметры внесения для компенсации явления сноса изменяют таким образом, чтобы во время дальнейшего внесения какие-либо количества средства защиты растений не достигали тех участков поверхности, которые, в соответствии с маршрутом и/или аппликационной картой, не должны и/или еще не должны быть обработаны средством защиты растений.
6. Способ по одному из пп. 1-5, отличающийся тем, что количества средства защиты растений, которые вносят за единицу времени, количество применяемых форсунок, положение форсунок, давление перед форсунками, высота полета дрона, скорость полета дрона, скорость ветра и направление ветра вводят в модель, с помощью которой определяют пространственное распределение вносимого средства защиты растений.
7. Способ по одному из пп. 1-6, отличающийся тем, что составляют цифровую карту распределения, при этом в цифровой карте распределения фиксируют те количества средства защиты растений, которые в результате внесения средства защиты растений осели на участки поверхности поля.
8. Способ по одному из пп. 1-7, отличающийся тем, что во время внесения цифровую аппликационную карту сравнивают с цифровой картой распределения, и параметры внесения, и/или маршрут, и/или высоту полета и скорость полета дрона согласуют таким образом, чтобы цифровая карта распределения соответствовала цифровой аппликационной карте.
9. Беспилотный летательный аппарат (дрон) для внесения средства защиты растений на поле, на котором растут культурные растения, содержащий
- резервуар для средства защиты растений,
- по меньшей мере одну форсунку для выдачи средства защиты растений над полем,
- средство подачи для подачи средства защиты растений из резервуара в направлении по меньшей мере одной форсунки,
- запоминающее устройство для хранения цифровой аппликационной карты, в которой для отдельных участков поверхности поля указаны количества средства защиты растений, которые подлежат внесению,
- блок управления, который сконфигурирован таким образом, что он выполняет маневрирование летательным аппаратом по маршруту над полем и при этом побуждает средство подачи вносить средство защиты растений на поле через по меньшей мере одну форсунку в соответствии с цифровой аппликационной картой, во время пролета беспилотного летательного аппарата над полем,
причем блок управления, во время внесения средства защиты растений, получает информацию о пространственном распределении вносимого средства защиты растений и согласует параметры внесения, когда пространственное распределение приводит к отклонению вносимых количеств от данных цифровой аппликационной карты,
причем блок управления содержит модель, способную вычислять пространственное распределение средства защиты растений, выпускаемого через по меньшей мере одну форсунку, при меняющихся параметрах внесения и сноса, или коммуникативно связан с внешним стационарным компьютером, на котором реализована такая модель.
10. Носитель данных с хранящимся на нем программным кодом, загружаемым в оперативное запоминающее устройство компьютера или блока управления и обеспечивающим выполнение компьютером или блоком управления следующих этапов:
- считывание цифровой аппликационной карты, в которой для отдельных участков поверхности поля указаны количества средства защиты растений, которые подлежат внесению, причем во время процесса внесения цифровую аппликационную карту постоянно обновляют,
- управление дроном для внесения на поле средства защиты растений в соответствии с цифровой аппликационной картой,
- определение сноса во время внесения средства защиты растений,
- согласование параметров внесения и/или параметров полета и/или маршрута таким образом, чтобы снос уменьшался или был сведен к минимуму.
| WO 2016189468 A1, 01.12.2016 | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| CN 105292480 А, 03.02.2016 | |||
| CN 105539851 A, 04.05.2016 | |||
| CN 106335641 A, 18.01.2017 | |||
| CN 204415735 U, 24.06.2015 | |||
| JP 2005245372 A, 15.09.2005. | |||

