ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
Эта заявка испрашивает приоритет заявки на патент Китая № 201410851690.1, поданной 31 декабря 2014 в Государственное бюро интеллектуальной собственности Китая, полное содержание которой включено в настоящий документ посредством ссылки.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее раскрытие относится к способу исследования c помощью КТ и устройству для КТ и, в частности, относится к способу реконструкции изображения в системе визуализации с помощью рентгеновской КТ.
ОПИСАНИЕ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
Система КТ, как правило, используется в устройствах медицинской визуализации и промышленных детектирующих устройствах, которые сканируют исследуемый объект посредством рентгеновских лучей, изображают исследуемый объект с использованием данных сканирования и, таким образом, обнаруживают внутреннюю часть исследуемого объекта. Для системы КТ необходимо иметь более высокое пространственное разрешение в случае, если измерение для геометрических размеров исследуемого объекта и обнаружение небольших дефектов исследуемого объекта реализованы с использованием системы КТ.
Патентный документ CN102525527A раскрывает способ обработки данных проекций, который использует устройство рентгеновской компьютерной томографии для визуализации. Устройство включает в себя гентри, в котором находится источник рентгеновского излучения и детектор рентгеновских лучей типа двухмерной решетки. Источник рентгеновского излучения и детектор рентгеновских лучей типа двухмерной решетки установлены на вращающемся кольце с противоположных сторон от исследуемого предмета.
В соответствии со способом, раскрытым в вышеупомянутом патентном документе, данные проекций получаются с использованием конического луча вдоль круговой траектории, значение весового коэффициента для упомянутых данных проекций определяется в соответствии с нормализованной весовой функцией WEGR(β, γ) с управляемой с помощью электрокардиограммы реконструкцией (EGR), основанной на весовой функции UEGR(Φ(β)) с EGR, причем упомянутая UEGR(Φ(β)) является нормализованной с помощью суммирования UEGR(Φ(βcn)) от n=−NPI до n=NPI, где Φ является кардиальной фазой, β является углом обзора, βcn является дополнительным углом обзора, PI = π; все данные проекций умножаются на значение весового коэффициента, как определено упомянутой WEGR(β, γ), где γ является веерным углом конического луча.
Однако пространственное разрешение изображения, полученного посредством упомянутого выше способа, не удовлетворяет требованиям для описанного выше применения.
Фактически, пространственное разрешение является важным параметром для системы рентгеновской КТ, которая ограничена некоторыми аппаратными факторами, в том числе, например, размером фокуса источника луча, размером детектора, коэффициентом увеличения системы сканирования и т.п.
Коэффициент усиления системы сканирования может быть выбран на основании различных параметров системы, а также на основании размеров исследуемого объекта, как результат, размера фокуса источника луча и размеров форм-факторов детектора, которые ограничивают пространственное разрешение системы. Кроме того, в промышленной системе КТ, так как рентгеновские лучи имеют относительно высокую энергию, фокус источника луча обычно имеет размер в диапазоне от 1,0 мм до 2,0 мм, чтобы удовлетворять требованию для рассеяния тепла мишени. Однако блок детектора имеет размеры субмиллиметрового порядка, соответственно, размер фокуса источника луча формирует основной фактор ограничения пространственного разрешения системы КТ.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Для решения упомянутых выше проблем обеспечен способ исследования с помощью КТ, содержащий этапы, на которых: (1) осуществляют круговое сканирование исследуемого объекта посредством рентгеновских лучей в соответствии с предварительно заданным значением угловой дискретизации, которое представляет собой число точек дискретизации на одном круге, для получения группы дискретизационных данных проекций при различных углах проекции, предварительно заданное значение угловой дискретизации больше 1000; (2) обрабатывают дискретизационные данные проекций для получения данных проекций множества виртуальных подфокусов, эквивалентных большому фокусу источника излучения в системе КТ; и (3) осуществляют реконструкцию изображения в соответствии с данными проекций множества виртуальных подфокусов.
В варианте осуществления настоящего изобретения предварительно заданное значение угловой дискретизации больше 8000.
В варианте осуществления настоящего изобретения предварительно заданное значение N угловой дискретизации получается в соответствии со следующей формулой: 
В варианте осуществления настоящего изобретения на этапе (2) данные проекций множества виртуальных подфокусов получаются в соответствии с дискретизационными данными проекций при различных углах проекции и интенсивностью, соответствующей множеству виртуальных подфокусов.
В варианте осуществления настоящего изобретения данные проекций множества виртуальных подфокусов получаются с использованием следующей формулы:
где 





В варианте осуществления настоящего изобретения перед этапом (1) большой фокус системы КТ мелко делится на множество виртуальных подфокусов посредством способа измерения размера фокуса, и получается интенсивность, соответствующая множеству виртуальных подфокусов.
В варианте осуществления настоящего изобретения этап, на котором получают интенсивность, соответствующую множеству виртуальных подфокусов, содержит этапы, на которых:
измеряют размер большого фокуса системы КТ посредством способа формирования изображения с помощью небольшого отверстия;
мелко делят большой фокус на множество эквивалентных виртуальных подфокусов; и
определяют интенсивность, соответствующую множеству эквивалентных виртуальных подфокусов, в соответствии с кривой распределения фокусной интенсивности.
В варианте осуществления настоящего изобретения способ дополнительно содержит этап, на котором: корректируют дискретизационные данные проекций перед этапом (2).
В варианте осуществления настоящего изобретения этап, на котором корректируют дискретизационные данные проекций, содержит этапы, на которых:
измеряют интенсивность 
вычисляют коэффициенты 

в которой k является номером отсчета угловой дискретизации, который увеличивается с первоначального значения 1 до тех пор, пока значение k не будет больше предварительно заданного номера отсчета угловой дискретизации.
Также обеспечено устройство для КТ, содержащее источник излучения, детектор, соответствующий источнику излучения, блок определения предварительно заданного значения угловой дискретизации, блок обработки дискретизационных данных проекций и блок реконструкции, в котором, блок определения предварительно заданного значения угловой дискретизации предназначен для определения предварительно заданного значения угловой дискретизации, которое представляет собой число точек дискретизации на одном круге, предварительно заданное значение угловой дискретизации больше 1000; источник излучения и детектор расположены по обе стороны от исследуемого объекта и предназначены для кругового сканирования исследуемого объекта посредством рентгеновских лучей в соответствии с предварительно заданным значением угловой дискретизации для получения группы дискретизационных данных проекций с различными углами проекции; блок обработки дискретизационных данных проекций выполнен с возможностью обработки дискретизационных данных проекций для получения данных проекций множества виртуальных подфокусов, эквивалентных большому фокусу источника излучения в системе КТ; и блок реконструкции выполнен с возможностью выполнения реконструкции изображения в соответствии с данными проекций множества виртуальных подфокусов.
В варианте осуществления настоящего изобретения предварительно заданное значение угловой дискретизации больше 8000, и предварительно заданное значение N угловой дискретизации получается в соответствии со следующей формулой: 
В варианте осуществления настоящего изобретения блок обработки дискретизационных данных проекций получает данные проекций множества виртуальных подфокусов в соответствии с дискретизационными данными проекций с различными углами проекции и интенсивность, соответствующую множеству виртуальных подфокусов, и данные проекций множества виртуальных подфокусов получаются с использованием следующей формулы:
где 




В варианте осуществления настоящего изобретения устройство дополнительно содержит блок измерения размера фокуса, блок деления фокуса и блок определения интенсивности, при этом блок измерения размера фокуса предназначен для измерения размера большого фокуса системы КТ посредством способа формирования изображения с помощью небольшого отверстия; блок деления фокуса предназначен для мелкого деления большого фокуса на множество эквивалентных виртуальных подфокусов; и блок определения интенсивности предназначен для определения интенсивности, соответствующей множеству эквивалентных виртуальных подфокусов, в соответствии с кривой распределения фокусной интенсивности.
В варианте осуществления настоящего изобретения устройство дополнительно содержит блок коррекции данных для коррекции дискретизационных данных проекций, в котором,
на основании измеренной интенсивности 

в которой k является номером отсчета угловой дискретизации, который увеличивается с первоначального значения 1 до тех пор, пока значение k не будет больше предварительно заданного номера отсчета угловой дискретизации.
В соответствии со способом, обеспеченном в настоящем раскрытии, он улучшает пространственное разрешение, устраняет ограничение размера фокуса источника рентгеновского излучения, накладываемое на пространственное разрешение, и упрощает режим сканирования системы, обеспечивая, таким образом, более полное использования луча, более высокое пространственное разрешение и более высокую эффективность реконструкции изображения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для более понятной иллюстрации технических решений в вариантах осуществления настоящего изобретения или в предшествующем уровне техники ниже кратко представлены прилагаемые чертежи для описания вариантов осуществления настоящего изобретения или в предшествующем уровне техники. Очевидно, что прилагаемые чертежи являются только некоторыми вариантами осуществления настоящего изобретения, и специалисты обычной квалификации в области техники могут получить другие чертежи из этих прилагаемых чертежей, не прилагая творческих усилий.
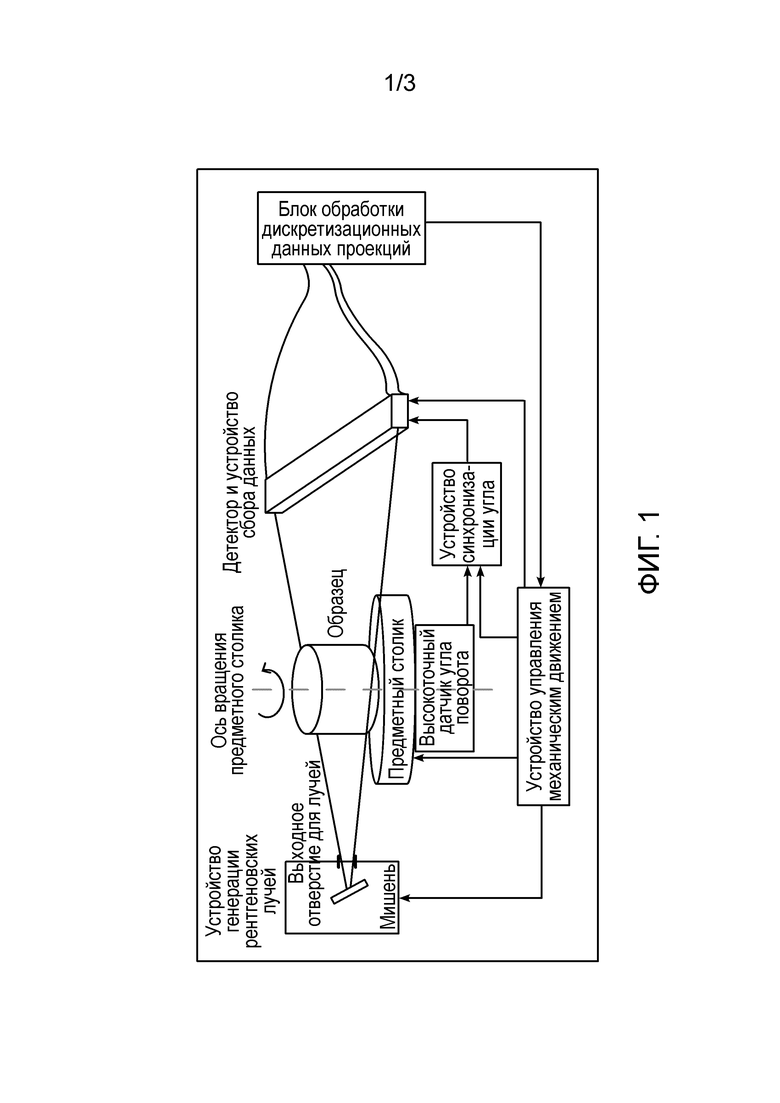
Фиг. 1 является структурным представлением системы визуализации с помощью рентгеновской КТ в соответствии с вариантом осуществления настоящего изобретения;
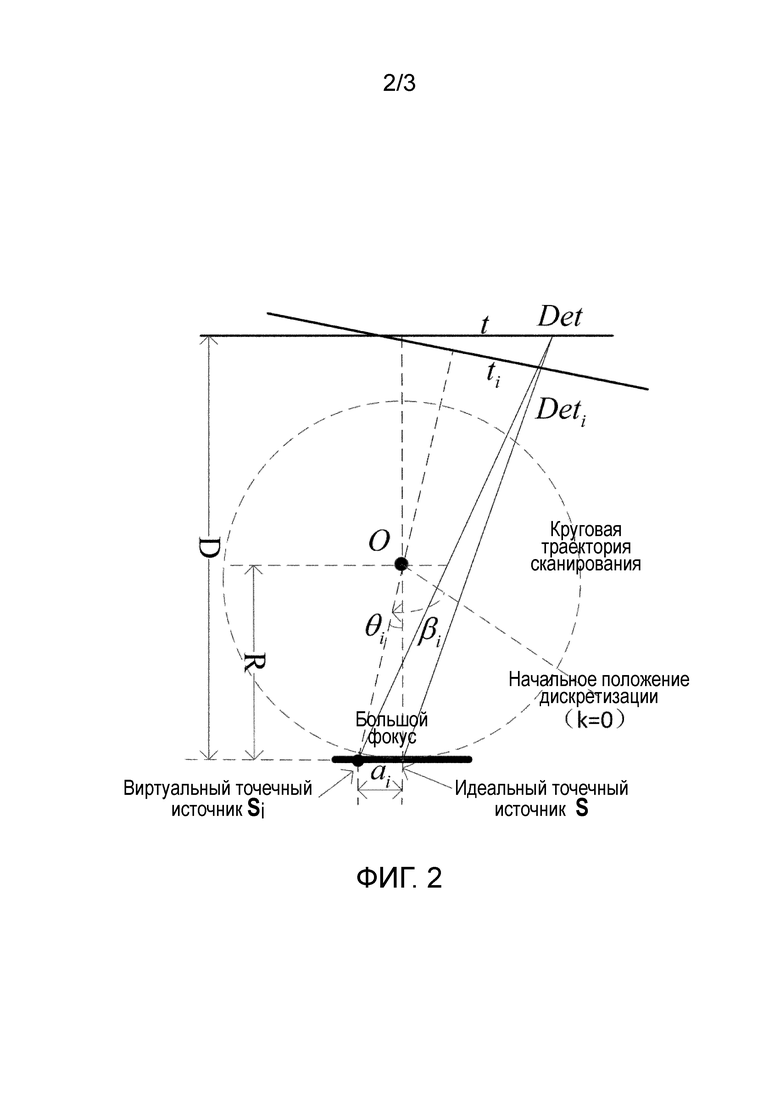
фиг. 2 является видом, показывающим деление фокуса в способе, обеспеченном в настоящем раскрытии; и
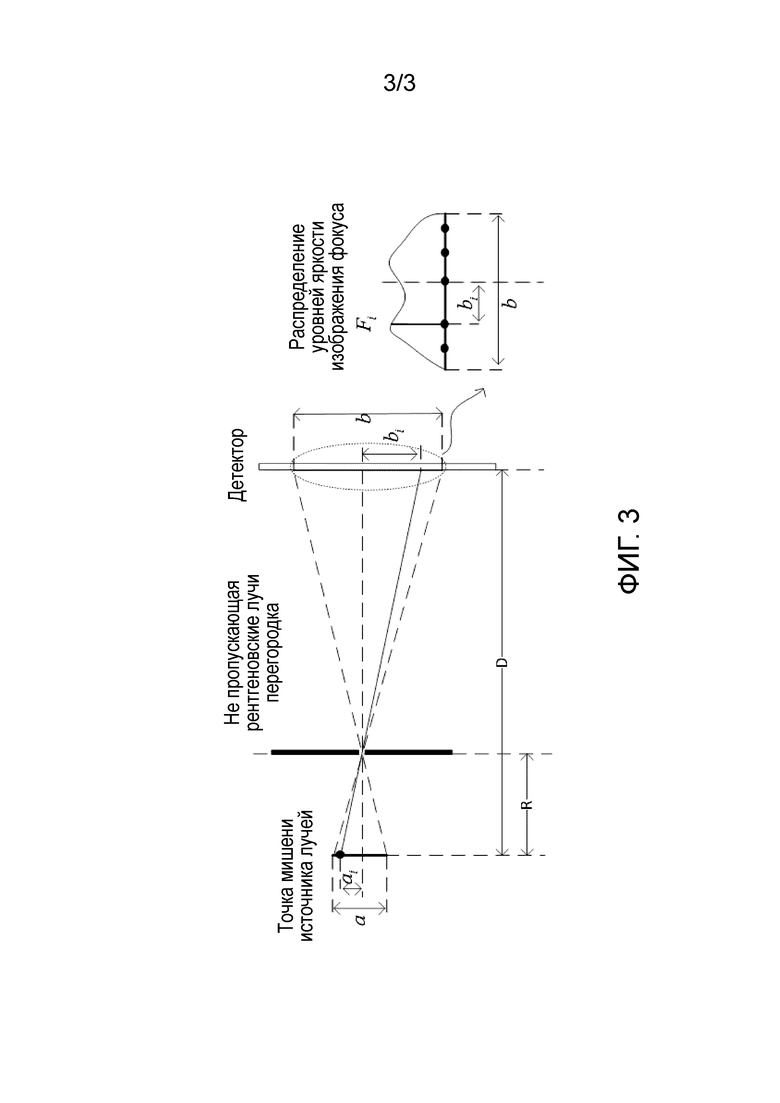
фиг. 3 является схематическим видом, показывающим определение размера фокуса и виртуальных фокусов посредством способа с помощью микроотверстия, который используется способом, обеспеченным в настоящем раскрытии.
Подробное описание предпочтительных вариантов осуществления изобретения
Ниже будут дополнительно подробно описаны варианты осуществления настоящего изобретения в сочетании с прилагаемыми фигурами и примерами. Варианты осуществления являются просто иллюстративными и не ограничивают объем настоящего изобретения.
Обеспечен способ исследования c помощью КТ, содержащий этапы: (1) кругового сканирования исследуемого объекта посредством рентгеновских лучей в соответствии с предварительно заданным значением угловой дискретизации, которое представляет собой число точек дискретизации на одном круге, для получения группы дискретизационных данных проекций c различными углами проекции, причем предварительно заданное значение угловой дискретизации больше 1000, например, значение может быть равно 2048, 3072, 4096, 5120, 6144, 7168 и т.д.; (2) обработки дискретизационных данных проекций для получения данных проекций множества виртуальных подфокусов, эквивалентных большому фокусу источника излучения в системе КТ; и (3) осуществления реконструкции изображения в соответствии с данными проекций множества виртуальных подфокусов.
В предпочтительном варианте осуществления предварительно заданное значение угловой дискретизации может быть больше 8000. Предварительно заданное значение N угловой дискретизации получается в соответствии со следующей формулой: 
В предпочтительном варианте осуществления данные проекций множества виртуальных подфокусов получаются с использованием следующей формулы:
где 




Предпочтительно, перед этапом (1) большой фокус системы КТ мелко делится на множество виртуальных подфокусов посредством способа измерения размера фокуса, и получается интенсивность, соответствующая множеству виртуальных подфокусов.
Предпочтительно, этап получения интенсивности, соответствующей множеству виртуальных подфокусов, содержит: измерение размера большого фокуса системы КТ посредством способа формирования изображения с помощью небольшого отверстия; мелкое деление большого фокуса на множество эквивалентных виртуальных подфокусов; и определение интенсивности, соответствующей множеству эквивалентных виртуальных подфокусов, в соответствии с кривой распределения фокусной интенсивности.
В варианте осуществления настоящего изобретения способ дополнительно содержит этап: коррекции дискретизационных данных проекций перед этапом (2). В частности, этап коррекции дискретизационных данных проекций содержит:
измерение интенсивности 
вычисление коэффициентов 
в которой k является номером отсчета угловой дискретизации, который увеличивается от начального значения 1 до тех пор, пока значение k не будет больше предварительно заданного номера отсчета угловой дискретизации.
Альтернативно, в другом варианте осуществления настоящего изобретения, во-первых, могут восстанавливаться данные проекций множества виртуальных подфокусов, данные затем корректируются, наконец, осуществляется реконструкция изображения.
В соответствии с предпочтительным вариантом осуществления настоящего изобретения обеспечено устройство КТ, содержащее источник излучения, детектор, соответствующий источнику излучения, блок определения предварительно заданного значения угловой дискретизации, блок обработки дискретизационных данных проекций и блок реконструкции, при этом блок определения предварительно заданного значения угловой дискретизации предназначен для определения предварительно заданного значения угловой дискретизации, которое представляет собой число точек дискретизации на одном круге, предварительно заданное значение угловой дискретизации больше 1000; источник излучения и детектор расположены по обе стороны от исследуемого объекта и предназначены для кругового сканирования исследуемого объекта посредством рентгеновских лучей в соответствии с предварительно заданным значением угловой дискретизации для получения группы дискретизационных данных проекций с различными углами проекции; блок обработки дискретизационных данных проекций выполнен с возможностью обработки дискретизационных данных проекций для получения данных проекций множества виртуальных подфокусов, эквивалентных большому фокусу источника излучения в системе КТ; и блок реконструкции выполнен с возможностью выполнения реконструкции изображения в соответствии с данными проекций множества виртуальных подфокусов.
Предпочтительно, предварительно заданное значение угловой дискретизации больше 8000, и предварительно заданное значение N угловой дискретизации получается в соответствии со следующей формулой:
Предпочтительно, блок обработки дискретизационных данных проекций получает данные проекций множества виртуальных подфокусов в соответствии с дискретизационными данными проекций с различными углами проекции и интенсивностью, соответствующей множеству виртуальных подфокусов, и данные проекций множества виртуальных подфокусов получаются с использованием следующей формулы:
где 




В предпочтительном варианте осуществления настоящего изобретения устройство дополнительно содержит блок измерения размера фокуса, блок деления фокуса и блок определения интенсивности, при этом блок измерения размера фокуса предназначен для измерения размера большого фокуса системы КТ посредством способа формирования изображения с помощью небольшого отверстия; блок деления фокуса предназначен для мелкого деления большого фокуса на множество эквивалентных виртуальных подфокусов; и блок определения интенсивности предназначен для определения интенсивности, соответствующей множеству эквивалентных виртуальных подфокусов, в соответствии с кривой распределения фокусной интенсивности.
В предпочтительном варианте осуществления настоящего изобретения устройство дополнительно содержит блок коррекции данных для коррекции дискретизационных данных проекций, в котором, на основании измеренной интенсивности 

в которой k является номером отсчета угловой дискретизации, который увеличивается от начального значения 1 до тех пор, пока значение k не будет больше предварительно заданного номера отсчета угловой дискретизации.
Описанные выше варианты осуществления не предназначены для ограничения настоящего изобретение, и специалист в области техники при желании может изменить или модифицировать настоящее изобретение.
Далее представлены варианты осуществления настоящего изобретения для изменения описанных выше вариантов осуществления, в которых обеспечен способ реконструкции изображения в системе визуализации с помощью рентгеновской КТ, содержащий этапы:
(1) активации генератора луча и детектора в системе визуализации с помощью рентгеновской КТ, измерения интенсивности 
(2) расположения исследуемого объекта в системе визуализации с помощью рентгеновской КТ для сканирования, измерения интенсивности 
(3) вычисления коэффициентов 
(4) реконструкции изображения распределения линейного коэффициента ослабления исследуемого объекта посредством алгоритма обратной проекции с фильтрацией на основании данных 
На фиг. 1 показана система визуализации с помощью КТ, используемая в вариантах осуществления настоящего изобретения. Система включает в себя:
устройство генерации рентгеновских лучей, включающее в себя мишень фокуса определенного размера для генерации рентгеновских лучей и выходное отверстие для рентгеновских лучей;
устройство для механического движения и контроллер, при этом устройство для механического движения и контроллер включают в себя предметный столик, раму, оборудованную рентгеновским аппаратом и детектором, систему управления и высокоточный датчик угла поворота; предметный столик приводится во вращательное движение по круговой траектории и/или линейное движение сдвига, а рама приводится в линейное движение сдвига и/или вращательное движение по круговой траектории, достигая, таким образом, круговой траектории сканирования; в варианте осуществления настоящего изобретения, как пример для описания, разработана круговая траектория сканирования с помощью веерного луча с использованием стационарной рамы и вращающегося предметного столика, а высокоточный датчик угла поворота используется для достижения точного углового положения и угловой дискретизации с высокой плотностью;
систему сбора данных, включающую в себя один или несколько рядов блоков линейных матричных детекторов и считывающую цепь, триггерную цепь сбора сигналов и цепь передачи данных;
основной компьютер управления и обработки данных для управления процессом работы системы КТ, в том числе механического вращения, электрического управления и управления защитной блокировкой.
Как было описано выше, в соответствии со способом настоящего изобретения в предпочтительном варианте осуществления реализованы следующие этапы перед осуществлением этапа (1):
измерения и получения размера фокуса источника рентгеновского излучения, и измерения и получения расстояния R между источником рентгеновского излучения и центром вращения вращающегося столика в системе визуализации с помощью рентгеновской КТ, и
определения предварительно заданного номера отсчета N угловой дискретизации в соответствии со следующей формулой на основании a и R:
Используя способ, описанный выше, число отсчетов превышает традиционное устройство КТ на порядок величины, таким образом, значительно улучшая пространственное разрешение реконструируемого изображения.
В варианте осуществления настоящего изобретения способ реконструкции изображения дополнительно содержит этап: определения, превышает ли значение k предварительно заданный номер отсчета N угловой дискретизации при осуществлении этапа (2), затем,
если k больше чем N, то осуществление этапа (3);
если k меньше чем N, то поворот исследуемого объекта на следующий угол сканирования и продолжение осуществления этапа (2).
В варианте осуществления настоящего изобретения способ реконструкции изображения дополнительно содержит этапы:
деления источника рентгеновского излучения на множество виртуальных подфокусов и определения положения 

после осуществления этапа (3), получения данных 
где 



реконструкции изображения распределения линейного коэффициента ослабления исследуемого объекта посредством алгоритма обратной проекции с фильтрацией на основании данных 
В соответствии с вариантом осуществления настоящего изобретения, чтобы улучшить пространственное разрешение системы КТ, предпочтительно, фокус делится на множество виртуальных подфокусов, и эквивалентный идеальный фокус (идеальный точечный источник) получается на основании виртуальных подфокусов, как показано на фиг. 2, которая иллюстрирует деление фокуса.
Большой фокус системы визуализации с помощью КТ равномерно делится на множество виртуальных подфокусов 










Как было описано выше, в способе, обеспеченном в настоящем изобретении, реконструкция изображения осуществляется с помощью алгоритма обратной проекции с фильтрацией.
Подробные этапы осуществления реконструкции с использованием алгоритма обратной проекции с фильтрацией указаны ниже:
во-первых, умножение на весовые коэффициенты данных проекции:
затем, осуществление фильтрации с помощью одномерного пилообразного фильтра в направлении детектора:

где t является интервалом в направлении детектора, обычно это интервал между блоками детекторов;
применение обратной проекции с учетом весовых коэфффициентов к фильтрованным данным (в угловом направлении):


где 

В настоящем раскрытии можно применить способ, изображенный на фиг. 3, для получения размера фокуса, в частности, как показано на фиг. 3:
использовать материал с высоким коэффициентом поглощения для формирования перегородки, и сделать в ней отверстие, затем получить изображение фокуса посредством теории формирования изображения с помощью маленького отверстия, таким образом, определить размер a фокуса, положение 




Описанные выше параметры удовлетворяют следующему соотношению:

Наиболее предпочтительный вариант осуществления настоящего изобретения приводится ниже. Следует отметить, что вариант осуществления, который будет описан, не предназначен для ограничения настоящего изобретения, и любой из вариантов осуществления, описанных выше, может решать задачу улучшения пространственного разрешения различными техническими методами. Наиболее предпочтительный вариант осуществления ниже комбинирует все упомянутые выше средства для достижения наилучшего из технических эффектов. Однако, это не должно ограничивать настоящее изобретение, то есть любой из вариантов осуществления, описанных выше, может решать проблемы, рассматриваемые в настоящем изобретении.
В наиболее предпочтительном варианте осуществления:
Используется система визуализации с помощью КТ, показанная на фиг. 1. Для получения наилучшего пространственного разрешения способ реконструкции изображения содержит этапы:
(1) активации источника рентгеновского излучения и детектора, осуществления деления фокуса и измерения размера фокуса посредством способа, показанного на фиг. 2 и 3, для получения распределения интенсивности фокуса системы, затем деления источника рентгеновского излучения на множество виртуальных подфокусов, например, большой фокус может быть разделен на 5 виртуальных подфокусов, таким образом, определяется положение 

(2) определения значения N угловой дискретизации посредством приведенной ниже формулы на основании измеренного размера 


(3) испускания рентгеновских лучей от источника рентгеновского излучения, измерения интенсивности луча, ослабленного воздухом, преобразования интенсивности рентгеновских лучей, принятых блоком детектора в местоположении t, в значение 
(4) испускания рентгеновских лучей от источника рентгеновского излучения для осуществления углового сканирования исследуемого объекта, преобразования интенсивности рентгеновских лучей, принятых блоком детектора в местоположении t, в значение 
(5) если значение k увеличивается на 1, то определения, превышает ли значение k предварительно заданный номер отсчета N угловой дискретизации; если нет, то поворот исследуемого объекта до следующего угла сканирования и возвращения на (4), если да, переход к (6);
(6) предварительной коррекции данных проекции в соответствии со следующей формулой для получения коэффициента 
(7) эквивалентное соотношение между данными проекции 

где R является расстоянием между источником рентгеновского излучения и центром O вращения вращающегося столика, 





(8) процессор реконструирует изображение распределения линейного коэффициента ослабления исследуемого объекта посредством алгоритма обратной проекции с фильтрацией (FBP) на основании восстановленных данных 
В соответствии с техническими решениями настоящего изобретения оно улучшает пространственное разрешение системы КТ, не изменяя существующую систему КТ, и оно имеет высокую эффективность обработки данных и реконструкции изображения.
В предшествующем уровне техники края изображения являются размытыми, и пространственное разрешение является низким, только 2.4 пар линий/мм, в противоположность этому в вариантах осуществления настоящего изобретения края изображения являются четкими, а пространственное разрешение намного лучше, чем 3.0 пар линий/мм.
Предшествующие описания являются просто иллюстративными способами осуществления настоящего изобретения. Объем защиты настоящего изобретения здесь не ограничивается. Вариации или модификации, которые могут быть легко придуманы специалистами в данной области техники, не отступая от технического объема настоящего изобретения, находятся в пределах объема защиты настоящего изобретения. Поэтому объем настоящего изобретения определяется объемом формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМЫ СПИРАЛЬНОЙ КТ И СПОСОБЫ РЕКОНСТРУКЦИИ | 2015 |
|
RU2595312C1 |
| СПОСОБ РЕНТГЕНОВСКОГО КОНТРОЛЯ ВНУТРЕННЕЙ СТРУКТУРЫ ИЗДЕЛИЯ | 2019 |
|
RU2718406C1 |
| УСТРОЙСТВО И СПОСОБ ЛУЧЕВОЙ СКАНИРУЮЩЕЙ ВИЗУАЛИЗАЦИИ | 2012 |
|
RU2571170C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ИЗОБРАЖЕНИЯ, СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЯ И СРЕДА ДОЛГОВРЕМЕННОГО ХРАНЕНИЯ ИНФОРМАЦИИ | 2011 |
|
RU2510080C2 |
| СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЙ, УСТРОЙСТВО ОБРАБОТКИ ИЗОБРАЖЕНИЙ И НОСИТЕЛЬ ДАННЫХ | 2018 |
|
RU2709437C1 |
| КОМПЕНСАЦИЯ УСЕЧЕНИЯ ДЛЯ ИТЕРАЦИОННОЙ РЕКОНСТРУКЦИИ В КОМПЬЮТЕРНОЙ ТОМОГРАФИИ (КТ) С КОНИЧЕСКИМ ПУЧКОМ В КОМБИНИРОВАННЫХ СИСТЕМАХ ОФЭКТ/КТ | 2012 |
|
RU2606561C2 |
| ГЕОМЕТРИЧЕСКОЕ СОВМЕЩЕНИЕ, КОРРЕКЦИЯ ДВИЖЕНИЯ ОБРАЗЦА И НОРМАЛИЗАЦИЯ ИНТЕНСИВНОСТИ ПРОЕКЦИЙ КОМПЬЮТЕРНОЙ ТОМОГРАФИИ С ПОМОЩЬЮ ОПТИМИЗАЦИИ ПИ-ЛИНИЙ | 2019 |
|
RU2776773C2 |
| СИСТЕМА СКАНИРОВАНИЯ Х-КТ | 2006 |
|
RU2394494C2 |
| СИСТЕМА КТ-ВИЗУАЛИЗАЦИИ И СПОСОБ ДЛЯ СИСТЕМЫ КТ-ВИЗУАЛИЗАЦИИ | 2017 |
|
RU2711250C1 |
| СПОСОБ КАЛИБРОВКИ КОМПЬЮТЕРНО-ТОМОГРАФИЧЕСКОГО ИЗОБРАЖЕНИЯ, УСТРОЙСТВО И СИСТЕМА КОМПЬЮТЕРНОЙ ТОМОГРАФИИ | 2015 |
|
RU2602750C1 |
Использование: для исследования объекта исследования с помощью компьютерной томографии. Сущность изобретения заключается в том, что осуществляют круговое сканирование исследуемого объекта посредством рентгеновских лучей в соответствии с предварительно заданным значением угловой дискретизации, которое представляет собой число точек дискретизации на одном круге, для получения группы дискретизационных данных проекций при различных углах проекции, предварительно заданное значение угловой дискретизации больше 1000; обрабатывают дискретизационные данные проекций для получения данных проекций множества виртуальных подфокусов, эквивалентных большому фокусу источника излучения в системе компьютерной томографии (КТ); и осуществляют реконструкцию изображения в соответствии с данными проекций множества виртуальных подфокусов. Технический результат: обеспечение возможности повышения пространственного разрешения изображения. 3 н. и 15 з.п. ф-лы, 3 ил.
1. Способ исследования c помощью КТ, содержащий этапы, на которых:
(1) осуществляют круговое сканирование исследуемого объекта посредством рентгеновских лучей в соответствии с предварительно заданным значением угловой дискретизации, которое представляет собой число точек дискретизации на одном круге, для получения группы дискретизационных данных проекций при различных углах проекции, причем предварительно заданное значение угловой дискретизации больше 1000;
(2) обрабатывают дискретизационные данные проекций для получения данных проекций множества виртуальных подфокусов, эквивалентных большому фокусу источника излучения в системе КТ; и
(3) осуществляют реконструкцию изображения в соответствии с данными проекций множества виртуальных подфокусов.
2. Способ по п. 1, в котором предварительно заданное значение угловой дискретизации больше 8000.
3. Способ по п. 1 или 2, в котором предварительно заданное значение N угловой дискретизации получается в соответствии со следующей формулой:

4. Способ по п. 1, в котором
на этапе (2) данные проекций множества виртуальных подфокусов получаются в соответствии с дискретизационными данными проекций при различных углах проекции и интенсивностью, соответствующей множеству виртуальных подфокусов.
5. Способ по п. 4, в котором данные проекций множества виртуальных подфокусов получаются с использованием следующей формулы:

где 





6. Способ по п. 1, в котором
перед этапом (1) большой фокус системы КТ мелко делится на множество виртуальных подфокусов посредством способа измерения размера фокуса, и получается интенсивность, соответствующая множеству виртуальных подфокусов.
7. Способ по п. 6, в котором этап, на котором получают интенсивность, соответствующую множеству виртуальных подфокусов, содержит этапы, на которых:
измеряют размер большого фокуса системы КТ посредством способа формирования изображения с помощью небольшого отверстия;
мелко делят большой фокус на множество эквивалентных виртуальных подфокусов; и
определяют интенсивность, соответствующую множеству эквивалентных виртуальных подфокусов, в соответствии с кривой распределения фокусной интенсивности.
8. Способ по п. 1 или 5, дополнительно содержащий этап, на котором:
корректируют дискретизационные данные проекций перед этапом (2).
9. Способ по п. 8, в котором этап, на котором корректируют дискретизационные данные проекций, содержит этапы, на которых:
измеряют интенсивность 
вычисляют коэффициенты 
в которой k является номером отсчета угловой дискретизации, который увеличивается с первоначального значения 1 до тех пор, пока значение k не будет больше предварительно заданного номера отсчета угловой дискретизации.
10. Устройство для КТ, содержащее источник излучения, детектор, соответствующий источнику излучения, блок определения предварительно заданного значения угловой дискретизации, блок обработки дискретизационных данных проекций и блок реконструкции, в котором:
блок определения предварительно заданного значения угловой дискретизации предназначен для определения предварительно заданного значения угловой дискретизации, которое представляет собой число точек дискретизации на одном круге, причем предварительно заданное значение угловой дискретизации больше 1000;
источник излучения и детектор расположены по обе стороны от исследуемого объекта и предназначены для кругового сканирования исследуемого объекта посредством рентгеновских лучей в соответствии с предварительно заданным значением угловой дискретизации для получения группы дискретизационных данных проекций с различными углами проекции;
блок обработки дискретизационных данных проекций выполнен с возможностью обработки дискретизационных данных проекций для получения данных проекций множества виртуальных подфокусов, эквивалентных большому фокусу источника излучения в системе КТ; и
блок реконструкции выполнен с возможностью выполнения реконструкции изображения в соответствии с данными проекций множества виртуальных подфокусов.
11. Устройство для КТ по п. 10, в котором,
предварительно заданное значение угловой дискретизации больше 8000, и
предварительно заданное значение угловой дискретизации N получается в соответствии со следующей формулой:
12. Устройство для КТ по п. 10, в котором:
блок обработки дискретизационных данных проекций получает данные проекций множества виртуальных подфокусов в соответствии с дискретизационными данными проекций с различными углами проекции и интенсивностью, соответствующей множеству виртуальных подфокусов, и
данные проекций множества виртуальных подфокусов получаются с использованием следующей формулы:
где 




13. Устройство для КТ по п. 10, дополнительно содержащее блок измерения размера фокуса, блок деления фокуса и блок определения интенсивности, в котором:
блок измерения размера фокуса предназначен для измерения размера большого фокуса системы КТ посредством способа формирования изображения с помощью небольшого отверстия;
блок деления фокуса предназначен для мелкого деления большого фокуса на множество эквивалентных виртуальных подфокусов; и
блок определения интенсивности предназначен для определения интенсивности, соответствующей множеству эквивалентных виртуальных подфокусов, в соответствии с кривой распределения фокусной интенсивности.
14. Устройство для КТ по п. 10, дополнительно содержащее блок коррекции данных для коррекции дискретизационных данных проекций, в котором
на основании измеренной интенсивности 

в которой k является номером отсчета угловой дискретизации, который увеличивается с первоначального значения 1 до тех пор, пока значение k не будет больше предварительно заданного номера отсчета угловой дискретизации.
15. Способ реконструкции изображения в рентгеновской системе визуализации с помощью КТ, содержащий этапы, на которых:
(1) активируют генератор луча и детектор в рентгеновской системе визуализации с помощью КТ, измеряют интенсивность 
(2) располагают исследуемый объект в рентгеновской системе визуализации с помощью КТ для сканирования, измеряют интенсивность 
(3) вычисляют коэффициенты 
(4) реконструируют изображение распределения линейного коэффициента ослабления исследуемого объекта посредством алгоритма обратной проекции с фильтрацией на основании данных 
16. Способ реконструкции изображения по п. 15, в котором перед осуществлением этапа (1) осуществляются следующие этапы, на которых:
измеряют и получают размер фокуса источника рентгеновского излучения, и измеряют и получают расстояние R между источником рентгеновского излучения и центром вращения поворотного столика в рентгеновской системе визуализации с помощью КТ, и
определяют предварительно заданный номер отсчета N угловой дискретизации в соответствии со следующей формулой на основании a и R:
17. Способ реконструкции изображения по п. 16, дополнительно содержащий этап, на котором:
определяют, превышает ли значение k предварительно заданный номер отсчета N угловой дискретизации при осуществлении этапа (2), затем
если k больше чем N, то осуществляют этап (3);
если k меньше чем N, то поворачивают исследуемый объект на следующий угол сканирования и продолжают осуществлять этап (2).
18. Способ реконструкции изображения по п. 16, дополнительно содержащий этапы, на которых:
делят источник рентгеновского излучения на множество виртуальных подфокусов и определяют местоположение 

после осуществления этапа (3) получают данные 
где 



реконструируют изображение распределения линейного коэффициента ослабления исследуемого объекта посредством алгоритма обратной проекции с фильтрацией на основании данных
| CN 102525527 A, 04.07.2012 | |||
| US 6137860 A, 24.10.2000 | |||
| US 4472822 A, 18.09.1984 | |||
| US 8923478 B2, 30.12.2014 | |||
| СПОСОБ ДОСМОТРА ГРУЗОВ С ИСПОЛЬЗОВАНИЕМ ПРОСВЕЧИВАНИЯ ИЗЛУЧЕНИЕМ ПОД РАЗНЫМИ УГЛАМИ | 2007 |
|
RU2400735C2 |
| УСТАНОВКА И СПОСОБ ОБНАРУЖЕНИЯ КОНТРАБАНДЫ В АВИАЦИОННЫХ ГРУЗОВЫХ КОНТЕЙНЕРАХ | 2008 |
|
RU2390006C1 |

