Изобретение относится к области гидроакустики и может быть использовано для построения систем обнаружения локального объекта в условиях наличия распределенных помех различного происхождения. Под локальным объектом понимается подводный или надводный объект искусственного происхождения ограниченного размера (корабль, подводный аппарат, буй, контейнер и т.д.)
В практике построения систем обнаружения обычно рассматривается задача обнаружения эхосигнала на фоне нормальной стационарной помехи. Относительно мощности нормальной стационарной помехи выбирается порог в соответствии с выбранными критериями и происходит обнаружение эхосигнала в случае превышения сигнала над порогом (А.Н. Яковлев, Г.П. Каблов Гидролокаторы ближнего действия Судостроение Л 1983 г.стр. 88).
Однако в реальных условиях имеется помеха, обусловленная реверберацией, либо наличием отражения излученного гидролокатором сигнала от звукорассеивающих слоев естественного или искусственного происхождения, так называемая распределенная помеха. Распределенная помеха затрудняет обнаружение локального объекта или приводит к повышению вероятности ложной тревоги. Классификация помех по характеру их возникновения рассматривается в книге Л.В. Орлова, А.А. Шаброва Гидроакустическая аппаратура рыбопромыслового флота Л. Судостроение 1987 г. стр. 51-59.
Известен метод обнаружения локального объекта с использованием гидролокатора, бокового обзора, установленного на подвижном носителе. Использование этого метода позволяет обнаруживать локальный объект, измерять дистанцию до него и направление на обнаруженный объект (Яковлев А.Н. Каблов Г.П. Гидролокаторы ближнего действия. Л. Судостроение 1983 г.). Этот способ содержит: излучение зондирующего сигнала, измерение времени задержки между излученным сигналом и принятым эхосигналом, определение дистанция до цели по величине временной задержки и известной скорости распространения звука, определение направления прихода эхосигнала.
Недостатком данного способа является то, что он не может обнаруживать локальный объект на фоне распределенной помехи. Обнаружение сигнала производится либо оператором по информации, предоставляемой на индикаторе, либо при сравнении амплитуды эхосигнала с порогом в направлении цели в соответствии с выбранными критериями относительно нормальной стационарной помехи.
Наиболее близким по количеству общих признаков к предлагаемому способу является способ обнаружения локального объекта на фоне распределенной помехи по патенту РФ №№2460088.
Способ содержит излучение зондирующего сигнала, прием эхосигнала, измерение времени прихода эхосигнала, сравнение его с порогом и принятие решения об обнаружении локального отражателя, причем прием эхосигнала осуществляют многоканальным приемным трактом, пространственные приемные каналы которого образуют веер статических характеристик направленности, пересекающихся на уровне, не меньшем чем 0,7 от максимума; набор временных реализаций для обработки осуществляют последовательно в каждом приемном канале; определение превышения эхосигналом уровня выбранного порога производят в каждом приемном канале, выбирают соседние приемные каналы, в которых произошло превышение порога, определяют временные интервалы прихода эхосигнала в этих каналах и при совпадении временных интервалов измеряют корреляционную функцию между временными наборами выбранных соседних приемных каналов и число каналов, в которых произошло превышение порога, а принятие решения о наличии локального отражателя принимают при коэффициенте корреляции между временными наборами соседних приемных каналов, имеющих одинаковое время прихода эхосигнала, большем 0,5, в противном случае принимают решение о наличии распределенной помехи или о наличии нелокального отражателя.
Недостатком данного способа является необходимость использовать статический веер характеристик направленности, которые перекрываются на уровне больше 0,7 от максимального направления, что приводит к усложнению аппаратуры и увеличению времени обработки.
Задачей изобретения является обеспечение возможности работы гидролокатора на фоне распределенной помехи при более дешевом построении гидролокатора.
Технический результат предлагаемого технического решения заключается в обеспечении обнаружения локальных объектов на фоне распределенной помехи с использованием одной характеристики направленности приемной антенны гидролокаторами, которые имеют одноканальный приемный тракт или многоканальный со статическим веером широких характеристик направленности.
Указанный технический результат достигается тем, что в способе обнаружения локального объекта на фоне распределенной помехи, содержащем излучение зондирующего сигнала, прием эхосигнала, последовательный набор временных реализаций для обработки, измерение времени прихода эхосигнала, сравнение его с порогом и принятие решения об обнаружении локального отражателя с помощью корреляционной обработки, введены новые признаки, а именно излучают два одинаковых зондирующих сигнала: первый - в момент времени tиз, второй - разнесенный на фиксированный интервал Т, больший, чем длительность эхосигнала от предполагаемого объекта, осуществляют прием эхосигнала одной характеристикой направленности, измеряют собственную скорость движения Vсоб, набор временных реализаций для обработки осуществляют последовательно в одном приемном канале, производят в каждом последовательном временном интервале обработки определение превышения эхосигналом уровня выбранного порога, запоминают временные реализации первого временного интервала Ni, в котором обнаружено превышение выбранного порога и время его начала tNi, запоминают временную реализацию второго временного интервала, в котором также произошло превышение порога Nj, и время его начала tNj, измеряют максимальную амплитуду в первом Ni, временном интервале A1макс и ее временное положение t1макс, измеряют максимальную амплитуду во втором Nj временном интервале А2макс и ее временное положение t2макс, если это последовательные временные интервалы J=I+1 и (t2макс - t1макс)≤Т, определяют коэффициент корреляции между временными реализациями, принадлежащими интервалам Ni и Nj, и при коэффициенте корреляции больше 0,5 принимают решение о наличии локального объекта, а дальность Дизм до объекта определяют по временному положению t2макс максимальной амплитуды А2мак интервала Nj с учетом фиксированной задержки Т между излученными зондирующими сигналами по формуле:
Дизм=0,5(C-Vсоб)(t2макс-Т-tиз).
Поясним достижение технического результата.
Гидролокаторы, которые имеют статический веер узких характеристик направленности, как правило, применяются в дорогостоящих гидроакустических комплексах, которые имеют высокопроизводительную вычислительную технику. Большинство гидролокационных станций не имеют таких вычислительных средств, и их система обработки не может использовать технические решения, предлагаемые прототипом. Кроме того, для гидролокаторов, имеющих статический веер с узкими перекрывающимися характеристиками направленности, могут быть ситуации, когда обнаружение эхосигнала производится на фоне развитого пузырькового следа, который частично экранирует эхосигнал от корпуса. Тогда в соседних пространственных каналах эхосигнал, используемый для корреляции, не будет обнаружен и техническое решение прототипа окажется не эффективным. Поэтому предлагается использовать сложную посылку, которая состоит из двух одинаковых зондирующих сигналов, разнесенных на интервал Т, который больше, чем длительность эхосигнала от реальных объектов классификации. Реальные объекты имеют ограниченные размеры в горизонтальной и вертикальной плоскостях. Как правило, такие размеры не превышают 150 метров, а если они зависят от курсового положения объектов, то и того меньше. Поэтому если использовать зондирующие сигналы с высоким разрешением по времени, то можно получить одинаковую структуру эхосигнала от двух последовательных зондирующих сигналов, разнесенных по времени на интервал, в течение которого временная структура эхосигнала не должна измениться, а с другой стороны, эхосигналы во времени не должны перекрываться и искажать друг друга. Это условие и определяет выбор интервала Т, а первое условие выполняется автоматически тем, что за время между зондирующими сигналами положение объекта не может существенно изменится.
Поскольку положение объекта за интервал времени между излученными зондирующими сигналами не может существенно изменится, то и положение отражающих элементов объекта также не изменится, а значит, и структура эхосигналов от двух последовательных зондирующих сигналов будет содержать одинаковое число амплитудных выбросов и одинаковое временное положение между ними. В этом случае коэффициент корреляции между временными реализациями будет близок к 1. Обработка принимаемой входной реализации в современных вычислительных системах определяется общим объемом информации по пространству и времени, которая последовательно выбирается во времени для обработки. Этот интервал времени обработки не будет совпадать с интервалом времени Т между зондирующими сигналами, но как правило длительность интервалов обработки будет соизмерима с длительностью эхосигналов от объектов. В этом случае может оказаться, что в последовательных временных интервалах обработки могут находиться части сигналов, что приведет к снижению коэффициента корреляции. Основной задачей обработки такого двойного сигнала является идентификация эхосигналов в соседних временных интервалах обработки. Поэтому исходная процедура содержит пороговое обнаружение эхосигналов одними и теме же алгоритмами при одинаковом пороге и определение временных интервалов обработки, в которых обнаружены эхосигналы. Эти временные интервалы необходимо запомнить и определить коэффициент корреляции между последовательными временными реализациями в этих интервалах обработки. Определение коэффициентов корреляции - это стандартная процедура, которая используется в прототипе. Каждая временная реализация привязана к единому времени и в интервале обработки общее количество точек одинаково. Определяется положение максимальной амплитуды A1макс и ее временное положение t1макс в интервале Nj, номер отсчета максимальной амплитуды А2макс во втором интервале Nj и ее временное положение t2макс. Разница между этими отсчетами не должна превышать времени между излученными зондирующими сигналами Т. Номер временного отсчета максимальной амплитуды второго сигнала определяет дистанцию до объекта на момент определения коэффициента корреляции. Коэффициент корреляции определяется между последовательными временными реализациями, которые удовлетворяют условиям J=I+1 и (t2макс-t1макс)≤Т.
Определение коэффициента корреляции является известной операцией, которая используется в прототипе, а также широко используется при обработке сложных сигналов, когда входная временная реализация сравнивается с опорной (Р. Бенджамин «Анализ радио и гидролокационных сигналов» М. ВИМО 1969 г.). В нашем случае задача упрощается, поскольку известен фиксированный сдвиг Т между излученными зондирующими сигналами. При определении дистанции до обнаруженного объекта необходимо производить по временному положению максимальной амплитуды второго зондирующего сигнала относительно момента излучения первого зондирующего сигнала. Кроме того, необходимо учитывать изменение дистанции до обнаруженного объекта, вызванное собственным движением за время распространения зондирующего сигнала до объекта и отраженного сигнала до приемника. Эта корректировка осуществляется тем, что уменьшается скорость звука на величину собственной скорости движения, которая измеряется так же, как и скорость звука в м/с.
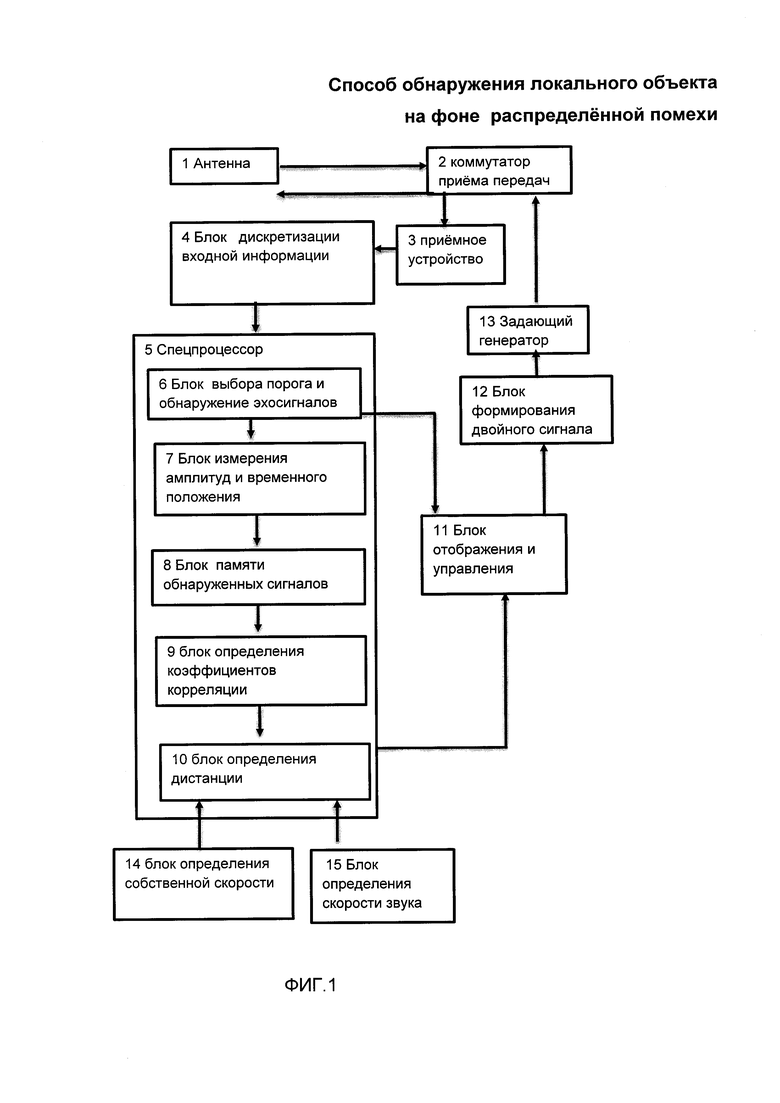
Блок-схема устройства, реализующего предлагаемое техническое решение, представлена на фиг. 1.
На фиг. 1 антенна 1 через коммутатор приема передачи 2, приемное устройство 3 и блок дискретизации входной информации 4 соединена со спецпроцессором 5, в состав которого входят последовательно соединенные блок 6 выбора порога и обнаружения эхосигнала, блок 7 определения амплитуд и временного положения максимума, блок 8 памяти обнаруженных эхосигналов, блок 9 определения коэффициентов корреляции, блок 10 определения дистанции. Первый выход спецпроцессора соединен через первый вход блока 11 управления и отображения, блок 12 формирования двойного сигнала, задающий генератор 13 со вторым входом коммутатора 2 приема передачи, второй выход которого соединен с антенной 1. Второй вход спецпроцессора 5 соединен со входом блока 14 определения собственной скорости, а третий вход спецпроцессора соединен с блоком 15 измерения скорости звука. Второй выход спецпроцессора 5 соединен со вторым входом блока 11 управления и отображения.
По команде из блока 11 управления и отображения в блоке 12 происходит формирование зондирующего сигнала, состоящего из двух последовательных одинаковых сигналов, разнесенных по времени на интервал Т, который поступает на генератора 3 и через коммутатор приема передачи 2 излучается антенной 1. Входная информация принимается антенной 1 и через коммутатор приема передами 2 поступает в приемное устройство 3, где усиливается и передается в блок 4 дискретизации входной информации. Блок 4 в общем виде представляет собой аналоговоцифровой преобразователь, в котором происходит формирование последовательных временных интервалов для обработки в спецпроцессоре 5 по пространственным каналам за все время излучения и приема.
Последовательные дискретизированные отсчеты временных интервалов поступают в блок 6 выбора порога и обнаружения эхосигналов. В блоке 6 измеряется помеха и выбирается порог обнаружения, при превышении которого фиксируется амплитуда отсчета и его положение по времени и по пространству в блоке 7. Из всех отсчетов выбираются отсчеты, имеющие максимальную амплитуду, и весь интервал передается в блок 8 памяти обнаруженных эхосигналов. В блоке 8 сравнивается временное положение этих максимальных отсчетов и если они расположены в последовательных временных интервалах, эти временные интервалы дисретизированных отсчетов передаются в блок 9 определения коэффициентов корреляции. При этом должно выполняться условие, что разность временного расположения этих максимальных отсчетов должно быть не больше Т. В блоке 9 производится определение коэффициента корреляции двух последовательных временных интервалов, содержащих максимальные амплитуды. Если коэффициент корреляции превышает 0,5, то принимается решение о наличии эхосигнала от локального объекта, определяется временное положение максимального отсчета второго последовательного интервала. В этот же блок спецпроцессора поступает оценка собственной скорости и скорости звука от стандартных приборов. По измеренным оценкам производится определение дистанции по обнаруженному объекту и пространственное положение по номеру пространственного канала.
Для качественного решения задач обработки гидроакустической информации в современных корабельных гидроакустических средствах (станциях) используются спецпроцессоры на основе ЦВС, обладающие высокой производительностью, функциональной надежностью и малыми габаритами. С использованием специального алгоритмического и программного обеспечения спецпроцессорами могут решаться все задачи формирования и обработки принимаемых гидроакустических сигналов, в том числе обнаружения эхосигналов, измерения их параметров (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника», СПб, изд. «Наука», 2004 г. Стр. 281). Там же на стр. 99 приведены абсолютные гидроакустические лаги, предназначенные для измерения собственной скорости. Измерители скорости звука являются известными приборами, выпускаемыми серийно (В.А. Комляков «Корабельные средства измерения скорости звука и моделирование акустических полей в океане» СПб Наука 2003 г.).
Таким образом, предлагаемое техническое решение позволяет автоматически обнаруживать эхосигналы от локальных объектов в условиях наличия реверберационных помех для гидролокаторов, которые имеют широкую характеристику направленности в приеме.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения параметров цели гидролокатором | 2017 |
|
RU2650835C1 |
| Способ обработки и классификации гидролокационной информации | 2019 |
|
RU2725517C1 |
| Система автоматического обнаружения и классификации | 2020 |
|
RU2758586C1 |
| ГИДРОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В КОНТРОЛИРУЕМОЙ АКВАТОРИИ | 2015 |
|
RU2593824C1 |
| СПОСОБ КЛАССИФИКАЦИИ ЭХО-СИГНАЛА ГИДРОЛОКАТОРА | 2011 |
|
RU2466419C1 |
| Гидролокационный способ обнаружения объекта и измерения его параметров | 2018 |
|
RU2697937C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА И ИЗМЕРЕНИЯ ЕГО ПАРАМЕТРОВ | 2016 |
|
RU2627977C1 |
| СПОСОБ ОБРАБОТКИ ЭХОСИГНАЛА ГИДРОЛОКАТОРА | 2013 |
|
RU2528556C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОГО ОБЪЕКТА НА ФОНЕ РАСПРЕДЕЛЕННОЙ ПОМЕХИ | 2011 |
|
RU2460088C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ | 2011 |
|
RU2461020C1 |
Изобретение относится к области гидроакустики и может быть использовано для построения систем обнаружения локального объекта в условиях наличия распределенных помех различного происхождения. Предложен способ обнаружения локального объекта на фоне распределенной помехи, который основан на излучении гидролокатором двух последовательных во времени посылок одинаковых зондирующих сигналов и корреляционной обработке эхосигналов, принятых с помощью одной характеристики направленности приемной антенны гидролокатора. Это позволяет использовать одноканальный гидролокатор или многоканальный гидролокатор, к которому не предъявляются специальные требования к ширине характеристик направленности статического веера его приемной антенны. 1 ил.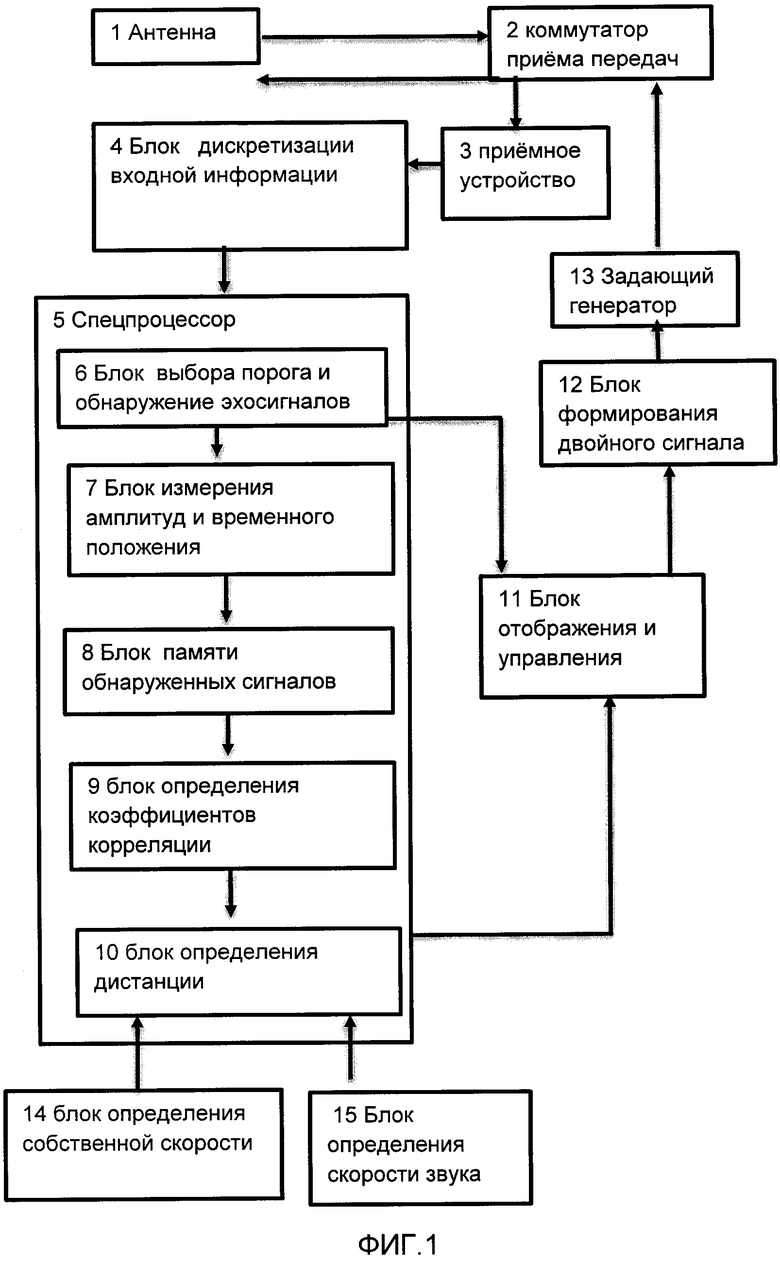
Способ, обнаружения локального объекта на фоне распределенной помехи, содержащий излучение зондирующего сигнала, прием эхосигнала, последовательный набор временных реализаций для обработки, измерение времени прихода эхосигнала, сравнение его с порогом и принятие решения об обнаружении локального отражателя с помощью корреляционной обработки, отличающийся тем, что излучают два одинаковых зондирующих сигнала: первый - в момент времени tиз, второй - разнесенный на фиксированный интервал Т, больший, чем длительность эхосигнала от предполагаемого объекта, осуществляют прием эхосигнала одной характеристикой направленности, измеряют собственную скорость движения Vсоб, набор временных реализаций для обработки осуществляют последовательно в одном приемном канале, производят в каждом последовательном временном интервале обработки определение превышения эхосигналом уровня выбранного порога, запоминают временные реализации первого временного интервала Ni, в котором обнаружено превышение выбранного порога и время его начала tNi, запоминают временную реализацию второго временного интервала, в котором также произошло превышение порога Nj, и время его начала tNj, измеряют максимальную амплитуду в первом Ni временном интервале A1макс и ее временное положение t1макс, измеряют максимальную амплитуду во втором Nj временном интервале A2макс и ее временное положение t2макс, если это последовательные временные интервалы J=I+1 и (t2макс-t1макс)≤T, то определяют коэффициент корреляции между временными реализациями, принадлежащими интервалам Ni и Nj, и при коэффициенте корреляции больше 0,5 принимают решение о наличии локального объекта, а дальность Дизм до объекта определяется по временному положению t2макс максимальной амплитуды А2мак интервала Nj с учетом фиксированной задержки Т между излученными зондирующими сигналами по формуле: Дизм=0,5(C-Vсоб)(t2макс-T-tиз).
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОГО ОБЪЕКТА НА ФОНЕ РАСПРЕДЕЛЕННОЙ ПОМЕХИ | 2011 |
|
RU2460088C1 |
| СПОСОБ ОБРАБОТКИ ЭХОСИГНАЛА ГИДРОЛОКАТОРА | 2013 |
|
RU2528556C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2001 |
|
RU2233456C2 |
| JP 2009250616 A, 29.10.2009 | |||
| JP 2011117845 A, 16.06.2011. | |||

