Изобретение относится к области судостроения и касается особенностей проведения подводно-технических работ различного назначения и спасания экипажей аварийных подводных лодок.
Устройства позиционирования подводных аппаратов (ПА) над объектом работ имеют важнейшее значение. Особенно учитывая, что работы проводятся при ограниченной видимости, при наличии течений и других неблагоприятных условий. Существует способ удержания ПА, в котором один манипулятор используется в качестве инструмента для фиксации у объекта работ в соответствии с рекомендациями Евсеева В.А., но это снижает эффективность проведения подводно-технических работ [1].
Известно устройство удержания обитаемого подводного аппарата у затонувшего объекта [2]. Устройство включает в себя металлическую пустотелую штангу с шаровыми шарнирами, полусферу-присос с обрезиненными кромками по окружности и патрубки с клапанами.
Устройство имеет ряд недостатков:
- металлическая штанга ограничивает возможность изменения позиции;
- металлическая пустотелая штанга может поломаться при существующих нагрузках и не понятно, как убирается, когда не используется.
Известно устройство для обеспечения возможности точного адаптивного длительного позиционирования типа «купол» (прототип изобретения) для ликвидации подводных разливов нефти, которое основано на принципе якорного позиционирования [3].
Недостатками данного устройства являются:
- ограниченность работы ПА по глубине;
- зависимость от гидрометеорологических условий;
- невозможность многократного использования тяжелых якорей.
Задачей изобретения является возможность проведения подводно-технических работ за счет жесткого позиционирования подводного аппарата в районе проведения работ, в том числе и при наличии течения.
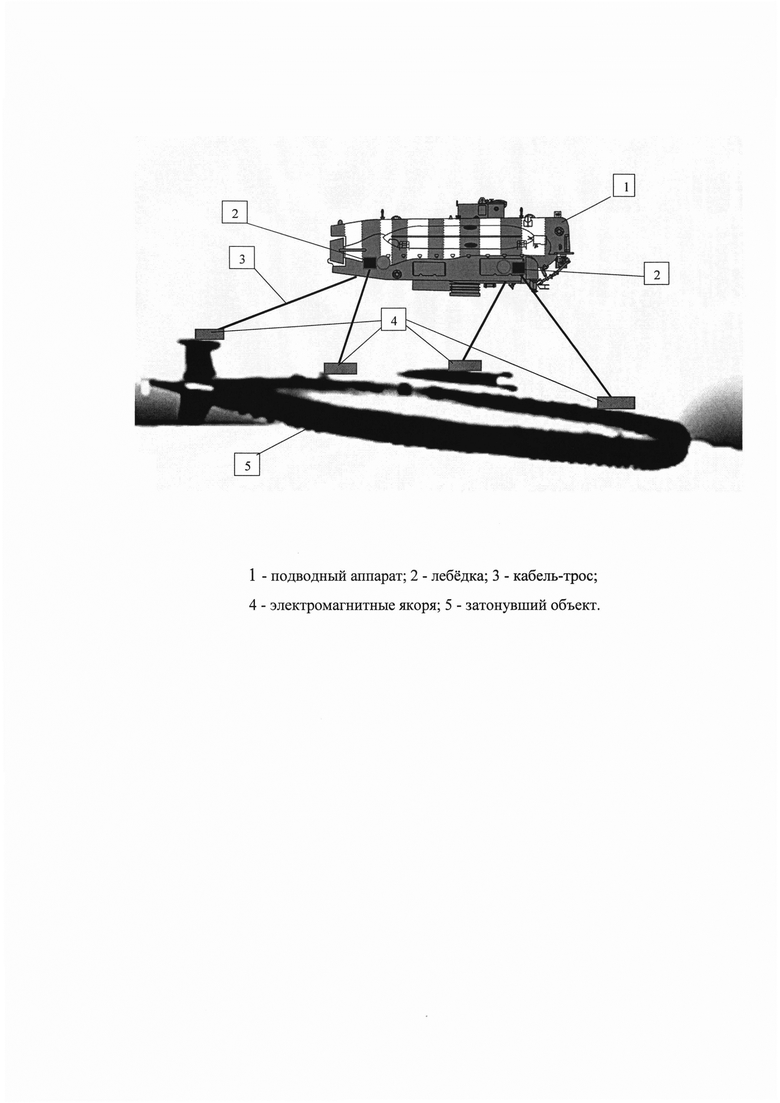
Сущность изобретения поясняется на чертеже.
Задача решается тем, что на ПА устанавливается якорное устройство, где тяжелые якоря заменяются электрическими магнитами. На подводном аппарате 1 крепится блок, в котором размещается электрическая лебедка 2 с кабель-тросом 3, на конце которого закреплен электромагнитный якорь 4. При нахождении подводного аппарата над объектом работ 5 оператор включает лебедку на разматывание кабель-троса с электромагнитным якорем на конце. При касании якорем металлической части затонувшего объекта подается электрический ток на электромагнит. После фиксации электромагнитного якоря с корпусом оператор включает лебедку на разматывание кабель-троса, при этом подводный аппарат перемещается во вторую позицию, используя движительно-рулевой комплекс, где по аналогии с первой позицией фиксирует второй электромагнитный якорь. Таким же образом осуществляется захват третьим и четвертым электромагнитными якорями. Далее позиционирование осуществляется за счет выбирания якорных тросов методом последовательного приближения в необходимую точку. Управление системой осуществляется с поста управления, расположенного на ПА. Энергообеспечение, управляющие сигналы передаются по кабель-тросу.
Преимуществами использования заявленного устройства по сравнению с приведенным аналогом являются независимость от метеорологических условий, автономность, возможность использования во всем диапазоне глубин работы подводных аппаратов.
Реализация изобретения повысит эффективность проведения подводно-технических работ с использованием различного инструмента и манипуляторов. При спасании людей с аварийной подводной лодки, лежащей на грунте, спасательный подводный аппарат сможет надежно пристыковаться к комингс-площадке, включая случаи наличия сильных течений.
Литература
1. Евсеев В.А. [и др.] Рекомендации по способам проведения подводно-технических работ с помощью ПА - СПб, в/ч 20914, 1996 г.
2. RU 2733634 Фирсанов С.В., Скакун А.Н., Котомкин С.В. и др. 25.03.2019 г.
3. RU 2702700 С1 Машошин А.И, Пашкевич И.В., Соколов А.И. Способ позиционирования подводных объектов, 2018.12.11 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система подводного позиционирования устройства типа "купол" для ликвидации подводных разливов нефти | 2019 |
|
RU2714336C1 |
| СПОСОБ ОБСЛЕДОВАНИЯ ЗАТОНУВШЕГО ОБЪЕКТА НЕОБИТАЕМЫМ ПОДВОДНЫМ АППАРАТОМ НА ТЕЧЕНИИ | 2011 |
|
RU2510354C2 |
| ПЛАТФОРМА-АМФИБИЯ ДЛЯ ПЕРЕМЕЩЕНИЯ, ПОЗИЦИОНИРОВАНИЯ И НЕПОДВИЖНОГО БАЗИРОВАНИЯ РАБОЧИХ СРЕДСТВ И МЕХАНИЗМОВ В ХОДЕ ОСУЩЕСТВЛЕНИЯ РАБОТ | 2010 |
|
RU2468932C2 |
| КОМБИНИРОВАННЫЙ ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2022 |
|
RU2809785C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2446983C2 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| БЫСТРОРАЗВЕРТЫВАЕМЫЙ КОМПЛЕКС ПОИСКА ЗАТОНУВШИХ ОБЪЕКТОВ | 2020 |
|
RU2746060C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2563074C1 |
| УСТРОЙСТВО КРЕПЛЕНИЯ СПАСАТЕЛЬНОГО ПОДВОДНОГО АППАРАТА К АВАРИЙНОЙ ПОДВОДНОЙ ЛОДКЕ | 2021 |
|
RU2786059C1 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
Изобретение относится к области судостроения и касается особенностей проведения подводно-технических работ различного назначения и спасания экипажей аварийных подводных лодок. Для позиционирования подводного аппарата (ПА) у объекта работ, на ПА устанавливают якорное устройство, где тяжелые якоря заменяют электромагнитными якорями, а также на ПА крепят блок, в котором размещают электрическую лебедку с кабель-тросом, по которому передают энергообеспечение и управляющие сигналы, и на конце которого закрепляют электромагнитный якорь. При нахождении подводного аппарата над объектом работ оператор ПА включает лебедку на разматывание кабель-троса с электромагнитным якорем на конце. При касании якорем металлической части затонувшего объекта подают электрический ток на электромагнит. После фиксации электромагнитного якоря с корпусом оператор включает лебедку на разматывание кабель-троса, при этом подводный аппарат перемещают во вторую позицию, используя движительно-рулевой комплекс, где по аналогии с первой позицией фиксируют второй электромагнитный якорь. Таким же образом осуществляют захват третьим и четвертым электромагнитными якорями, далее позиционирование осуществляют за счет выбирания якорных тросов методом последовательного приближения в необходимую точку. При этом управление системой осуществляют с ПА, и на ПА может устанавливаться от 1 до 4 якорей. Достигается повышение эффективности проведения подводно-технических работ с использованием различного инструмента и манипуляторов. 1 ил.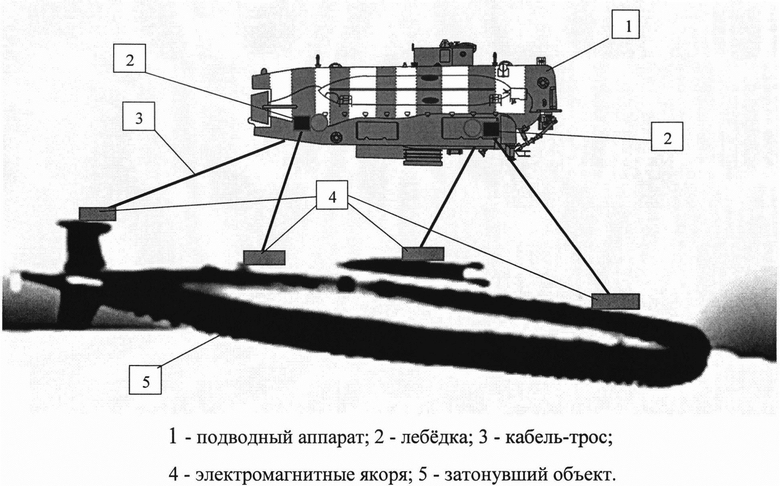
Способ позиционирования подводного аппарата (ПА) у объекта работ, характеризующийся тем, что на ПА устанавливают якорное устройство, где тяжелые якоря заменяют электромагнитными якорями, на ПА крепят блок, в котором размещают электрическую лебедку с кабель-тросом, по которому передают энергообеспечение и управляющие сигналы, и на конце которого закрепляют электромагнитный якорь, при нахождении подводного аппарата над объектом работ оператор ПА включает лебедку на разматывание кабель-троса с электромагнитным якорем на конце, при касании якорем металлической части затонувшего объекта подают электрический ток на электромагнит, после фиксации электромагнитного якоря с корпусом оператор включает лебедку на разматывание кабель-троса, при этом подводный аппарат перемещают во вторую позицию, используя движительно-рулевой комплекс, где по аналогии с первой позицией фиксируют второй электромагнитный якорь, таким же образом осуществляют захват третьим и четвертым электромагнитными якорями, далее позиционирование осуществляют за счет выбирания якорных тросов методом последовательного приближения в необходимую точку, при этом управление системой осуществляют с ПА, и на ПА может устанавливаться от 1 до 4 якорей.
| Способ позиционирования подводных объектов | 2018 |
|
RU2702700C1 |
| WO 2007022233 A2, 22.02.2007 | |||
| СПОСОБ ДИНАМИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ ОБИТАЕМОГО ПОДВОДНОГО АППАРАТА НАД ОБЪЕКТОМ РАБОТ | 2008 |
|
RU2394720C2 |
| KR 100852786 B1, 19.08.2008. | |||

