Изобретение относится к области подводной морской техники и может быть применено в разного рода подводных исследованиях и подводно-технических работах.
Для выполнения поисковых, спасательных и подводно-технических работ (ПТР) разработаны и применяются различные необитаемые подводные аппараты.
Известна разработка французского противоминного аппарата «Ремора», состоящего из двух автономных аппаратов. Большой автономный модуль является носителем малого автономного необитаемого подводного аппарата (АНПА) и осуществляет своими техническими средствами поиск и классификацию объектов на грунте. Малый автономный аппарат после расстыковки с носителем идентифицирует обнаруженный объект своим гидролокатором и сбрасывает около него гидроакустический приводной маяк. Далее возвращается на носитель, либо самостоятельно всплывает на поверхность при трудностях стыковки [1].
Недостатками аппарата являются:
- невозможность выполнения подводно-технических работ в связи с отсутствием у аппаратов рабочих манипуляторов;
- высокая вероятность недостоверной классификации объекта;
- возможность потери малого аппарата при нештатной ситуации;
- отсутствие прямой трансляции видео- и фотосигнала с изображением затонувшего объекта;
- длительность проведения поисковых операций и подводно-технических работ ограничивается емкостью аккумуляторных батарей.
Известен составной автономный необитаемый подводный аппарат, патент на изобретение RU 2770623 C1 [2], включающий обтекаемый корпус, который оснащен движителями, аккумуляторными батареями, средствами навигации и поиска затонувших объектов и состоящий из автономного необитаемого аппарата-носителя, на котором захватами закреплен рабочий телеуправляемый аппарат, который оснащен видеокамерами и рабочими манипуляторами, который управляется по кабелю, размещенному в нижней части корпуса аппарата-носителя. Сверху на корпусе автономного аппарата-носителя закреплен антенный модуль для радиобуя, в котором установлена лебедка с кабелем, а всплывающий радиобуй с аппаратурой управляющей линии связи и блоком спутниковой навигации подключен к этому кабелю.
Указанный составной АНПА является наиболее близким по технической сущности и принят в качестве прототипа. Недостатками прототипа являются:
- отсутствие малогабаритного телеуправляемого подводного аппарата, способного проникать в узкие проемы, отсеки затонувших судов через люки и иллюминаторы;
- длительность проведения подводно-технических работ и поисковых операций ограничивается емкостью аккумуляторных батарей;
- аккумуляторные батареи существенно увеличивают вес и габариты аппарата;
- выполнение работ манипуляторами, с использованием радиобуя для передачи информации, является задачей малоэффективной, в связи с тем, что запаздывание сигнала при этом недопустимо.
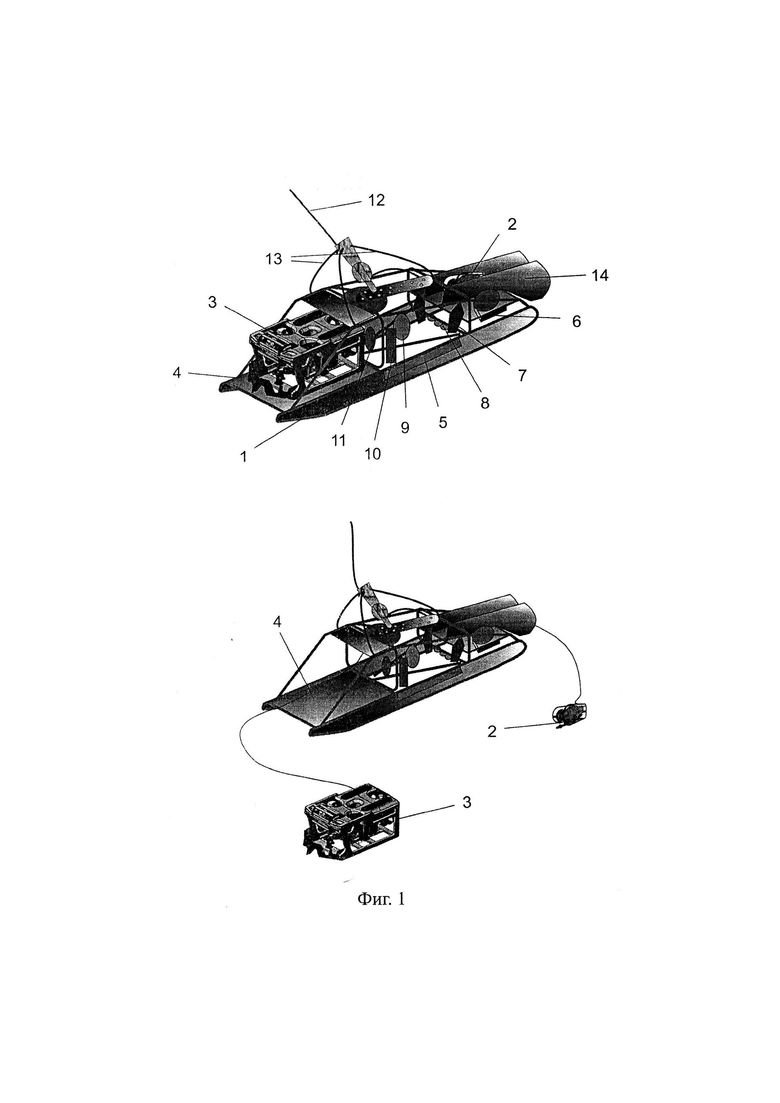
Задачей изобретения является устранение недостатков прототипа и повышение эффективности и расширение функциональных возможностей выполнения специальных подводно-технических и аварийно-спасательных работ путем создания роботизированного комплекса для выполнения поисковых и подводно-технических работ. Предлагается комбинированный подводный робототехнический комплекс (КПРК) 1, изображенный на Фиг. 1, в составе:
1. Миниатюрного телеуправляемого необитаемого подводного аппарата (МТНПА) 2 для использования из гаража буксируемого необитаемого подводного аппарата (БНПА), имеющего движительно-рулевой комплекс (ДРК), светильники, видеокамеру, гидролокатор кругового обзора, манипулятор типа «схват», способного проникать в узкие проемы, отсеки затонувших судов через люки и иллюминаторы. Аппарат может использоваться в качестве отдельного осмотрового ТИПА.
2. Рабочего телеуправляемого необитаемого подводного аппарата (РТНПА) 3, оборудованного ДРК, гидролокатором секторного/кругового обзора, альтиметром, комплектом цифровых видеокамер, комплектом подводных световых приборов, системой позиционирования, манипуляторным комплексом, сменным гидравлическим инструментом и который может производить:
- допоиск и обследование объектов, лежащих на грунте;
- расчистку комингс-площадки аварийной ПЛ, лежащей на грунте, в обеспечение работы спасательного глубоководного аппарата (СГА);
- передачу в отсеки аварийной ПЛ, лежащей на грунте, средств поддержания жизнедеятельности в глубоководных пеналах;
- подсоединение шлангов воздуха высокого давления (ВВД) и вентиляции;
- перерезание стальных тросов;
- остропку затонувших объектов и вынос на поверхность троса для их подъема надводными средствами;
- фото- и видеодокументирование подводных объектов, подводной обстановки и передачу видеосигнала в режиме реального времени;
- выполнение работ с использованием гидравлического инструмента;
- выполнение работ с судов-носителей, необорудованного побережья, причальных стенок и плавпирсов.
Аппарат может использоваться в качестве отдельного РТНПА.
3. Буксируемого необитаемого подводного аппарата (БНПА) 4 с гаражом из полипропилена для МТНПА и РТНПА, оборудованного гидролокатором бокового обзора (ГБО) 5, альтиметром 6, импульсным источником света 7, источником заливающего света 8, фотокамерой 9, цифровой видеокамерой 10, лазерным целеуказателем 11, механизмом удержания от чрезмерных наклонений в виде тросовых ограничителей 13, стабилизаторами курса 14, который предназначен для выполнения следующих задач:
- проведения поисковых работ на больших площадях с помощью ГБО;
- выполнения функции средства доставки МТНПА и РТНПА в район проведения ПТР;
- документирования и передачи полученной информации по кабель-тросу 12 с волоконно-оптическими линиями на пост управления на борту судна-носителя 15.
4. Контейнера поста управления (КПУ), предназначенного для размещения оборудования и мест для операторов, которые управляют работой систем и устройств КПРК при подготовке и проведении ПТР, располагаемого на судне-носителе.
Преимуществами предлагаемого комбинированного подводного робототехнического комплекса являются:
- длительность проведения поисковых операций ограничивается только возможностями судна-носителя;
- возможность непрерывно обследовать большие территории дна (электроэнергия подается по кабель-тросу с судна-носителя);
- возможность после обнаружения подводного объекта сразу приступить к обследованию, идентификации и проведению ПТР с использованием РТНПА или МТНПА;
- возможность проведения всего комплекса работ (выставление маяков, поиск, допоиск, идентификация, ПТР) без дополнительной подготовки;
- возможность выполнения всех работ единой командой;
- мобильность (возможность базироваться на различных судах);
- возможность выполнения работ в труднодоступных местах с проникновением в узкие проемы, отсеки затонувших судов через люки и иллюминаторы, и пробоины объектов, находящихся на грунте.
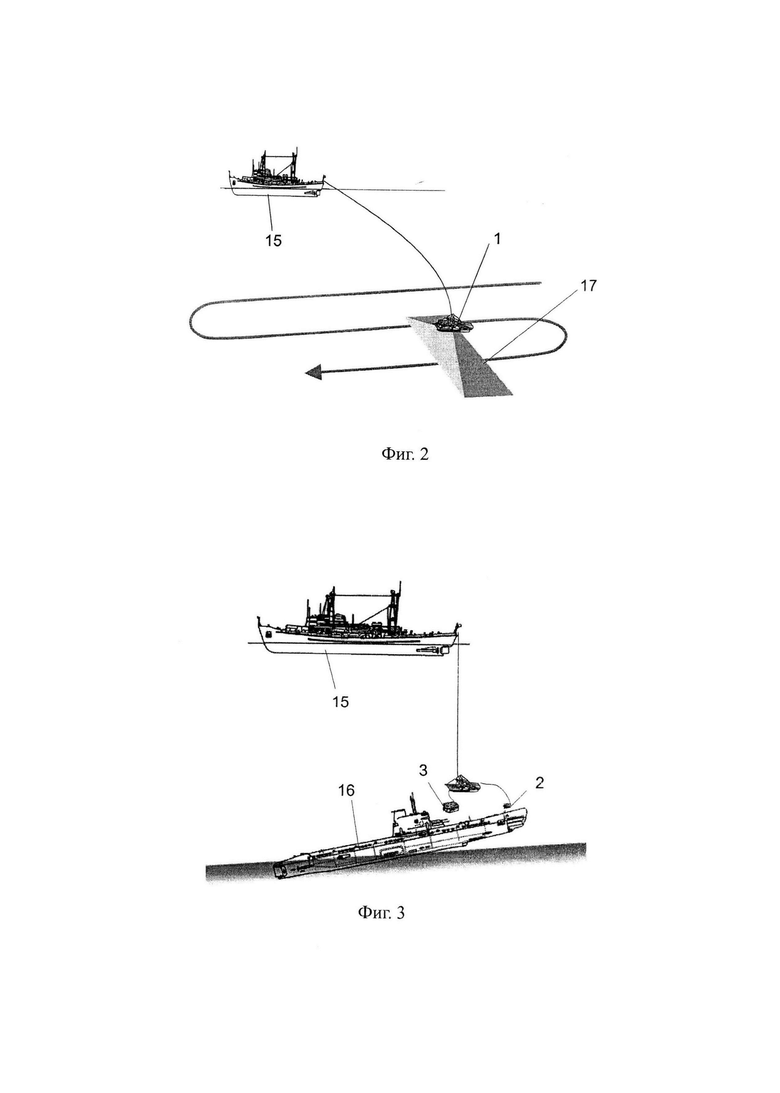
Грузоподъемным устройством судна-носителя 15 производится спуск КПРК 1 на воду (Фиг. 2). После погружения на глубину, позволяющую обеспечить эффективную работу ГБО, размещенного на БНПА, осуществляется поиск объектов, лежащих на грунте, прохождением по запланированному маршруту с полосой захвата 17, в соответствии с характеристиками ГБО. В случае обнаружения объекта судно-носитель 15 становится в точку над обнаруженным подводным объектом 16 (Фиг. 3), используя систему динамического позиционирования или любым иным способом, а МТНПА 2 осуществляет обследование и идентификацию обнаруженных объектов. В случае необходимости РТНПА 3, используя свое оборудование и инструмент, проводит подводно-технические работы.
Литература
1. Илларионов Г.Ю. Подводные роботы в минной войне - Калининград - 2008 г.
2. Составной автономный необитаемый подводный аппарат. Российский патент 2022 года, RU 2770623 С1 (https://patenton.ru/patent/RU2770623Cl).
| название | год | авторы | номер документа |
|---|---|---|---|
| СОСТАВНОЙ АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2021 |
|
RU2770623C1 |
| СПОСОБ ОБСЛЕДОВАНИЯ ЗАТОНУВШЕГО ОБЪЕКТА НЕОБИТАЕМЫМ ПОДВОДНЫМ АППАРАТОМ НА ТЕЧЕНИИ | 2011 |
|
RU2510354C2 |
| Мобильная спасательная система | 2017 |
|
RU2679382C1 |
| Самоходный телеуправляемый спасательный колокол | 2017 |
|
RU2679381C1 |
| БЫСТРОХОДНОЕ СПАСАТЕЛЬНОЕ СУДНО | 2023 |
|
RU2798921C1 |
| СПОСОБ СЪЁМКИ ШЕЛЬФОВОЙ ПОВЕРХНОСТИ ДНА АКВАТОРИИ | 2019 |
|
RU2725106C1 |
| БЫСТРОРАЗВЕРТЫВАЕМЫЙ КОМПЛЕКС ПОИСКА ЗАТОНУВШИХ ОБЪЕКТОВ | 2020 |
|
RU2746060C1 |
| Водолазно-спасательный глубоководный аппарат | 2020 |
|
RU2764140C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС ДЛЯ ВЫПОЛНЕНИЯ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2000 |
|
RU2220880C2 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2510352C2 |
Изобретение относится к области подводной морской техники и может быть применено в разного рода подводных исследованиях и подводно-технических работах. Комбинированный подводный робототехнический комплекс (КПРК) состоит из миниатюрного телеуправляемого необитаемого подводного аппарата (МТНПА); рабочего телеуправляемого необитаемого подводного аппарата (РТНПА); буксируемого необитаемого подводного аппарата (БНПА) с гаражами из полипропилена для МТНПА и РТНПА, предназначенного для проведения поисковых работ на больших площадях и доставки РТНПА и МТНПА в район проведения подводно-технических работ (ПТР), документирования и передачи полученной информации в режиме реального времени на пост управления; контейнера поста управления (КПУ), предназначенного для размещения в нем оборудования управления работой систем и устройств КПРК при подготовке и проведении ПТР. МТНПА предназначен для выполнения допоиска и обследования подводных объектов, в том числе и в труднодоступных местах с проникновением в узкие проемы, отсеки затонувших судов через люки, иллюминаторы и пробоины объектов, находящихся на грунте. РТНПА предназначен для выполнения допоиска и обследования подводных объектов, расчистки комингс-площадки аварийной подводной лодки (ПЛ), передачи в отсеки аварийной ПЛ, лежащей на грунте, средств поддержания жизнедеятельности, подсоединения шлангов ВВД и вентиляции, перерезания стальных тросов, остропки затонувших объектов и выноса на поверхность троса для их подъема надводными средствами, фото- и видеодокументирования подводных объектов, подводной обстановки и передачи видеосигнала в режиме реального времени, выполнения ПТР. Достигается повышение эффективности и расширение функциональных возможностей при подводно-технических и аварийно-спасательных работах. 3 ил.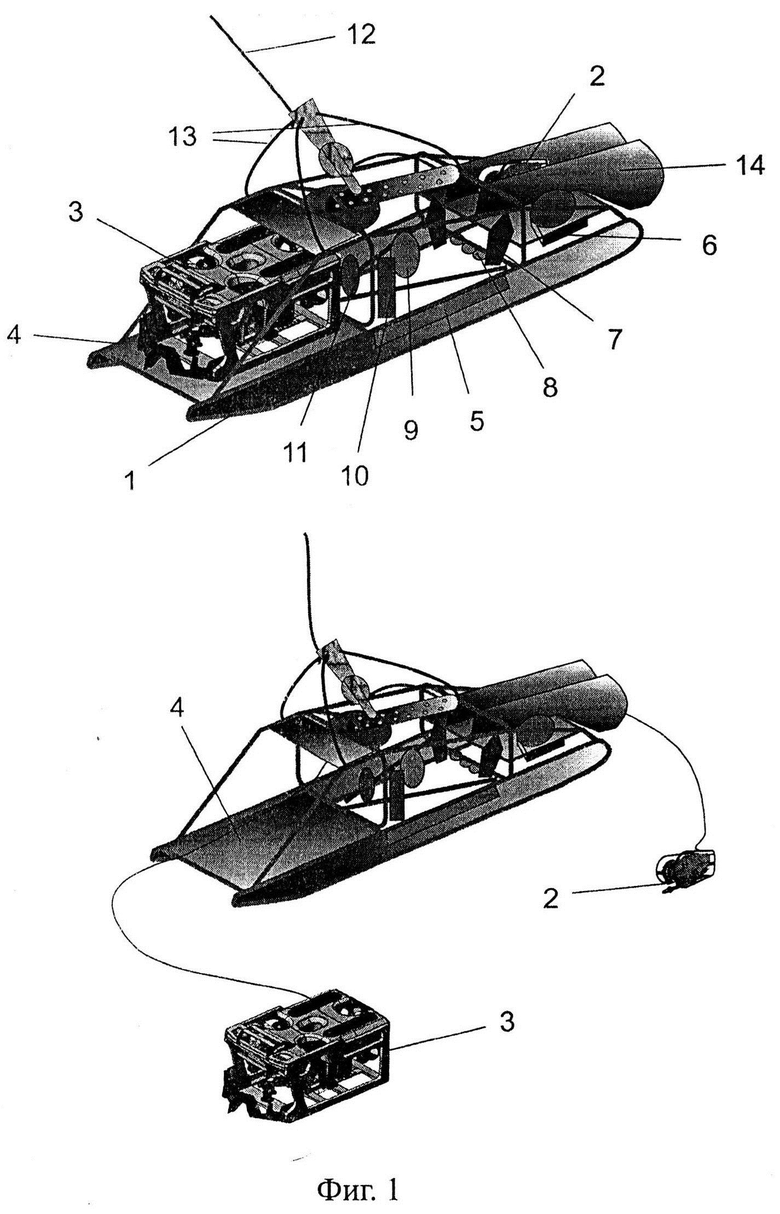
Комбинированный подводный робототехнический комплекс (КПРК), состоящий из миниатюрного телеуправляемого необитаемого подводного аппарата (МТНПА); рабочего телеуправляемого необитаемого подводного аппарата (РТНПА); буксируемого необитаемого подводного аппарата (БНПА) с гаражами из полипропилена для МТНПА и РТНПА, предназначенного для проведения поисковых работ на больших площадях и доставки РТНПА и МТНПА в район проведения подводно-технических работ (ПТР), документирования и передачи полученной информации в режиме реального времени на пост управления; контейнера поста управления (КПУ), предназначенного для размещения в нем оборудования управления работой систем и устройств КПРК при подготовке и проведении ПТР, отличающийся тем, что МТНПА предназначен для выполнения допоиска и обследования подводных объектов, в том числе и в труднодоступных местах с проникновением в узкие проемы, отсеки затонувших судов через люки, иллюминаторы и пробоины объектов, находящихся на грунте, а РТНПА предназначен для выполнения допоиска и обследования подводных объектов, расчистки комингс-площадки аварийной подводной лодки (ПЛ), передачи в отсеки аварийной ПЛ, лежащей на грунте, средств поддержания жизнедеятельности, подсоединения шлангов ВВД и вентиляции, перерезания стальных тросов, остропки затонувших объектов и выноса на поверхность троса для их подъема надводными средствами, фото- и видеодокументирования подводных объектов, подводной обстановки и передачи видеосигнала в режиме реального времени, выполнения ПТР.
| СОСТАВНОЙ АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2021 |
|
RU2770623C1 |
| US 20180251199 A1, 06.09.2018 | |||
| US 20190084658 A1, 21.03.2019 | |||
| СПОСОБ ПРОИЗВОДСТВА ПОДВОДНЫХ РАБОТ И ОБИТАЕМЫЙ ПОДВОДНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2399552C2 |
