Изобретение относится к системам поиска затонувших объектов, таких как, например, захороненное под водой оружие и разыскиваемые элементы воздушных и морских катастроф.
В большинстве случаев к поисковым работам привлекаются суда и летательные аппараты, оснащенные специальным оборудованием: гидроаккустическими станциями кругового и бокового обзора, телекамерами, магнитометрами, профилогрофами донных осадков. Район поиска размечается гидроакустическими маяками, а поиск осуществляется перемещением поисковой аппаратуры галсами. Также работы требуют тщательной подготовки и характеризуются большими материальными и временными затратами, затруднены наличием течений и практически неосуществимы в ледовых условиях.
В качестве аналога авторами рассмотрен «Способ обследования затонувшего объекта необитаемым подводным аппаратом на течении» по патенту РФ №2510354, 2014 г.
Способ обследования затонувшего объекта необитаемым подводным аппаратом на течении включает удержание аппарата вблизи грунта за искусственную опору. К якорю малоразмерного судна крепят трос, вокруг него заводят скользящую петлю из прочного материала и соединяют ее коротким стропом с корпусом спускаемого подводного аппарата. Трос якоря на судне выбирают вручную (на «панер»). Обеспечивается проведение подводно-технологических работ без использования водолазов.
К недостаткам аналога следует отнести ограниченность площади обследования и невозможность проведения работ в ледовых условиях.
В качестве прототипа авторами рассматривается современный способ решения проблем использования телеуправляемого подводного робота, имеющего протяженный гибкий элемент для обеспечения связи с управляющим объектом, средства обеспечения плавучести, движители позиционирования, маршевый гребной винт (движитель) и разведывательно-навигационное оборудование.
«Глубоководный добычный комплекс и телеуправляемый подводный робот» по патенту РФ №2214510 включает добычное судно, соединенные посредством спускоподъемного каната с поплавком, в котором смонтирован успокоитель качки, и к нему подведен гидростат с собственным поплавком и обитаемой гондолой. К ней подсоединены бокс-гараж для дистанционно управляемого мобильного исследовательского модуля и бокс с источником электрической энергии для гондолы. К гидростату крепятся оснащенный манипулятором робот с добычливым оборудованием и контейнер с аккумуляторами для питания робота. Комплекс снабжен волоконно-оптической системой связи с центром управления.
Телеуправляемый подводный робот включает электроприводной барабан. Движители позиционирования выполнены в виде водометов, а маршевый гребной винт смонтирован шарнирно для управления его положением. Разведывательно-навигационное оборудование включает сканирующий твердотельный лазер, телевизионный гидролокатор и цифровую видеокамеру, образующие в совокупности трехмерную телевизионную сканирующую систему, робот имеет энергоснабжение от внутреннего источника.
К недостаткам прототипа следует отнести большие сложность и массо-габаритные характеристики, не приемлемые для быстроразвертываемых поисковых систем, а также невозможность использования в ледовых условиях.
Настоящее изобретение решает техническую задачу скорейшего проведения работ по поиску затонувшего объекта даже в условиях ледовой обстановки.
Поставленная техническая задача решается тем, что быстроразвертываемый комплекс поиска затонувших объектов, содержащий фиксируемые в заданной точке начала поиска тросами к якорной плите поплавок и погружной блок с подсоединенным к нему посредством кабеля мобильным поисковым подводным аппаратом, электроприводной барабан, систему проводной связи с внешне расположенным центром управления подводно-техническими работами. Отличается тем, что в направлении поиска на расстоянии надежно взаимодействующей гидроакустической аппаратуры установлены на якорях образующие створ два гидроакустических излучателя, погружной блок снабжен дистанционно управляемым из центра управления электроприводным барабаном с кабелем подсоединения к погружному блоку поискового подводного аппарата, оснащенного поисковой аппаратурой, маршевым движителем, подруливающими устройствами и, по крайней мере, одним отделяющимся от него отметчиком места потопления объекта.
Изобретение иллюстрируется рисунками:
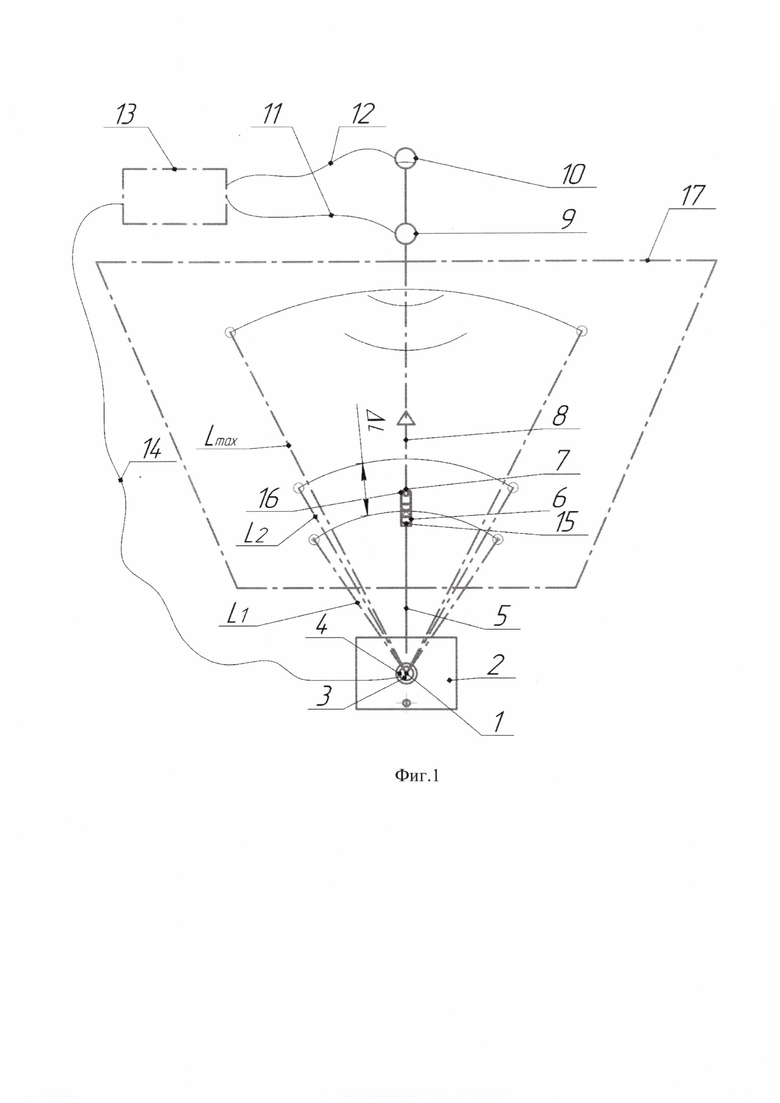
- на фиг. 1 в плане представлен общий вид быстроразвертываемого комплекса в рабочем положении;
- на фиг. 2 показаны установленные в ледовых условиях элементы комплекса.
На фиг. 1 показан план установки элементов комплекса на акватории. В точке 1 на дне расположена якорная плита 2 с закрепленными на ней поплавком 3 и погружным блоком 4, к которому на кабеле 5 подсоединен самоходный (мобильный) подводный аппарат 6 с комплектом поисковой аппаратуры, включающей носовой приемник 7 гидроакустических сигналов. В направлении 8 поиска на расстоянии от точки 1 устойчивого приема гидроакустических сигналов на якорях расположены образующие створ излучатели 9 и 10 кодовых гидроакустических сигналов, формируемых и передаваемых по кабелю 11 и 12 центром 13 управления, который посредством кабельной связи 14 через погружной блок 4 и кабель 5 управляет движением и положением подводного аппарата 6, оснащенного маршевым движителем 15 и подруливающим устройством 16.
Начальная длина L1, и максимальная длина Lmax кабельной связи 5 с возможными боковыми отклонениями от направления 8 определяют зону 17 поиска затонувшего объекта.
На Фиг. 2 изображена сборка из соединенных тросами якорной плиты 2, погруженного блока 4 и поплавка 3, установленная в точке 1 на дне 18 акватории 19, в частности, через искусственную полынью 20 ледового покрытия. Подводный аппарат 6 оснащен отметчиком 21 места потопления объекта и устройством его сброса с аппарата 6.
На погружном блоке 4 расположен барабан 21 с электроприводом и запасом кабеля 5, посредством которого по проводной связи 14 осуществляется управление подводным аппаратом 6.
Предлагаемый быстроразвертываемый комплекс средств поиска затонувших объектов функционирует следующим образом. После определения зоны 17 (Фиг. 1) поиска назначается точка 1 начала поиска, его генеральное направление 8, места установки излучателей 9 и 10 гидроакустических сигналов, образующих створ направления 8. Осуществляется монтаж всех элементов комплекса, укладка кабелей 11, 12, 14 их связи с центром 13 управления. Зимой, при наличии ледового покрытия, для укладки на дно 18 акватории 19 якорной плиты 2 подготавливается искусственная полынья 20 и оформляют лунки для установки на якорях створных излучателей 9 и 10.
На кабеле 5 вводят в воду самоходный подводный аппарат 6, с закрепленным на нем отметчиком 21 места затопления объекта (находки), включают маршевый движитель 15 и ориентируют положение подводного аппарата 6 по направлению 8 с помощью носового приемника 7 кодовых гидроакустических сигналов от излучателей 9 и 10. Последовательным включением подруливающего устройства 16 подводного аппарата 6 в течение необходимого для поиска в зоне 17 времени перемещают аппарат справа налево и слева направо, с помощью бортовой поисковой аппаратуры осуществляют поиск затонувшего объекта при длине L1 (Фиг. 1), кабеля 5. Работой барабана 21 (Фиг. 2) погружного блока 4 по сигналам 43 центра управления 13 увеличивают длину кабеля 5 на величину ΔL и выполняют поиск по дуге радиуса L2. По отмеченному выше алгоритму возможен тщательный, при необходимости многократный, поиск затонувшего объекта в пределах намеченной зоны 17.
При обнаружении затонувшего объекта сбрасывается около него отметчик 21, по показателям которого затем можно организовать подъем искомого объекта на поверхность акватории 19.
Таким образом, без привлечения сложной техники и водолазов возможно обследование зоны поиска независимо от наличия на акватории 19 ледового покрытия.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОБСЛЕДОВАНИЯ ДНА АКВАТОРИИ | 2020 |
|
RU2733565C1 |
| СОСТАВНОЙ АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2021 |
|
RU2770623C1 |
| СПОСОБ СЪЁМКИ ШЕЛЬФОВОЙ ПОВЕРХНОСТИ ДНА АКВАТОРИИ | 2019 |
|
RU2725106C1 |
| Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления и арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2021 |
|
RU2773538C1 |
| СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА И САМОХОДНЫЙ ПОДВОДНЫЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2710791C1 |
| ПОДВОДНОЕ СУДНО ДЛЯ ОБСЛУЖИВАНИЯ ПОДВОДНЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ НА АРКТИЧЕСКОМ ШЕЛЬФЕ И ДРУГИХ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2016 |
|
RU2629625C1 |
| САМОХОДНОЕ ПОДВОДНОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО (СПТУ) С ВАКУУМНЫМ ЗАХВАТОМ | 2021 |
|
RU2827915C2 |
| СПОСОБ ЗАЩИТЫ ОХРАНЯЕМОЙ АКВАТОРИИ ОТ ПОДВОДНЫХ ДИВЕРСАНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269449C1 |
| КОМБИНИРОВАННЫЙ ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2022 |
|
RU2809785C1 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |

Изобретение относится к области устройств выполнения подводно-технических работ, в частности к системам поиска затонувших объектов. Быстроразвертываемый комплекс поиска затонувших объектов содержит фиксируемые в заданной точке начала поиска тросами к якорной плите поплавок и погружной блок с подсоединенным к нему посредством кабеля мобильным поисковым подводным аппаратом, электроприводной барабан, систему проводной связи с внешне расположенным центром управления подводно-техническими работами. В направлении поиска на расстоянии надежно взаимодействующей гидроакустической аппаратуры установлены на якорях образующие створ два гидроакустических излучателя. Погружной блок снабжен дистанционно управляемым из центра управления электроприводным барабаном с кабелем подсоединения к погружному блоку поискового подводного аппарата, оснащенного поисковой аппаратурой, маршевым движителем, подруливающими устройствами и, по крайней мере, одним отделяющимся от него отметчиком места потопления объекта. Достигается быстрота проведения работ по поиску затонувшего объекта. 2 ил.
Быстроразвертываемый комплекс поиска затонувших объектов, содержащий фиксируемые в заданной точке начала поиска тросами к якорной плите поплавок и погружной блок с подсоединенным к нему посредством кабеля мобильным поисковым подводным аппаратом, электроприводной барабан, систему проводной связи с внешне расположенным центром управления подводно-техническими работами, отличающийся тем, что в направлении поиска на расстоянии надежно взаимодействующей гидроакустической аппаратуры установлены на якорях образующие створ два гидроакустических излучателя, погружной блок снабжен дистанционно управляемым из центра управления электроприводным барабаном с кабелем подсоединения к погружному блоку поискового подводного аппарата, оснащенного поисковой аппаратурой, маршевым движителем, подруливающими устройствами и, по крайней мере, одним отделяющимся от него отметчиком места потопления объекта.
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
| Гидроакустический комплекс для обнаружения движущегося подводного источника звука, измерения азимутального угла на источник звука и горизонта источника звука в мелком море | 2018 |
|
RU2687886C1 |
| Многофункциональный комплекс для выполнения подводно-технических работ | 2017 |
|
RU2653527C1 |
| WO 2005016742 A1, 24.02.2005. | |||

