Область техники
[0001] Настоящее изобретение относится к способу оценки собственного местоположения и устройству оценки собственного местоположения.
Уровень техники
[0002] В Патентном документе 1 раскрыта технология для определения того, находится ли текущее местоположение транспортного средства на обычной дороге или на скоростной автомагистрали, на основе того, есть ли в изображении местности, находящейся поблизости от транспортного средства и снятой камерой, изображение идентификации обычной дороги для идентификации того, что транспортное средство движется по обычной дороге, или изображение идентификации скоростной автомагистрали для идентификации того, что транспортное средство движется по скоростной дороге.
Патентный документ
[0003] Патентный документ 1: JP 2006-317286 A.
Техническая проблема
[0004] Хотя технология, описанная в Патентном документе 1, способна различать дороги, типы которых отличаются друг от друга, технология не способна различать разные дороги, типы которых одинаковы.
Таким образом, когда разные дороги, типы которых одинаковы, соответственно, существуют на разных высотах и двумерные местоположения дорог расположены близко друг к другу, иногда становится невозможным определить, на какой из дорог находится транспортное средство.
Задачей настоящего изобретения является обеспечение возможности определения того, на какой одной из дорог, расположенных на разной высоте, находится транспортное средство.
Решение проблемы
[0005] Согласно одному аспекту настоящего изобретения создан способ оценки собственного местоположения, включающий: обнаружение дорожного знака вблизи транспортного средства; определение текущего местоположения транспортного средства; получение информации о высоте обнаруженного дорожного знака из данных карты, в которых записана информация о двумерных координатах и информация о высоте дорожного знака, находящегося вблизи дороги, на основе относительного местоположения обнаруженного дорожного знака по отношению к транспортному средству и текущего местоположения; и оценку высоты, на которой находится транспортное средство, согласно информации о высоте, полученной из данных карты.
Преимущественные эффекты изобретения
[0006] Согласно аспекту настоящего изобретения можно определить, на какой из дорог, расположенных на разной высоте, находится транспортное средство.
Задача и преимущества изобретения будут реализованы и решены с помощью элементов и комбинаций, конкретно указанных в формуле изобретения. Следует понимать, что как предшествующее общее описание, так и последующее подробное описание являются иллюстративными и пояснительными и не ограничивают изобретение.
Краткое описание чертежей
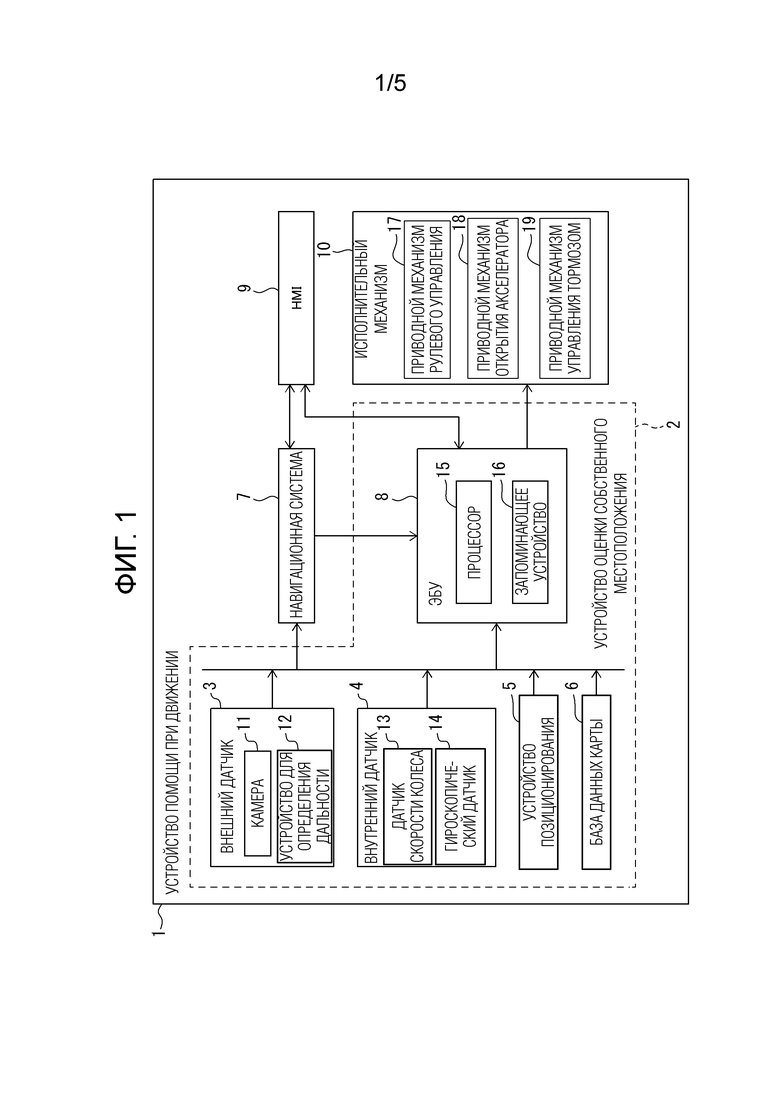
[0007] Фиг. 1 - схематическая диаграмма конфигурации примера устройства помощи при движении согласно варианту осуществления;
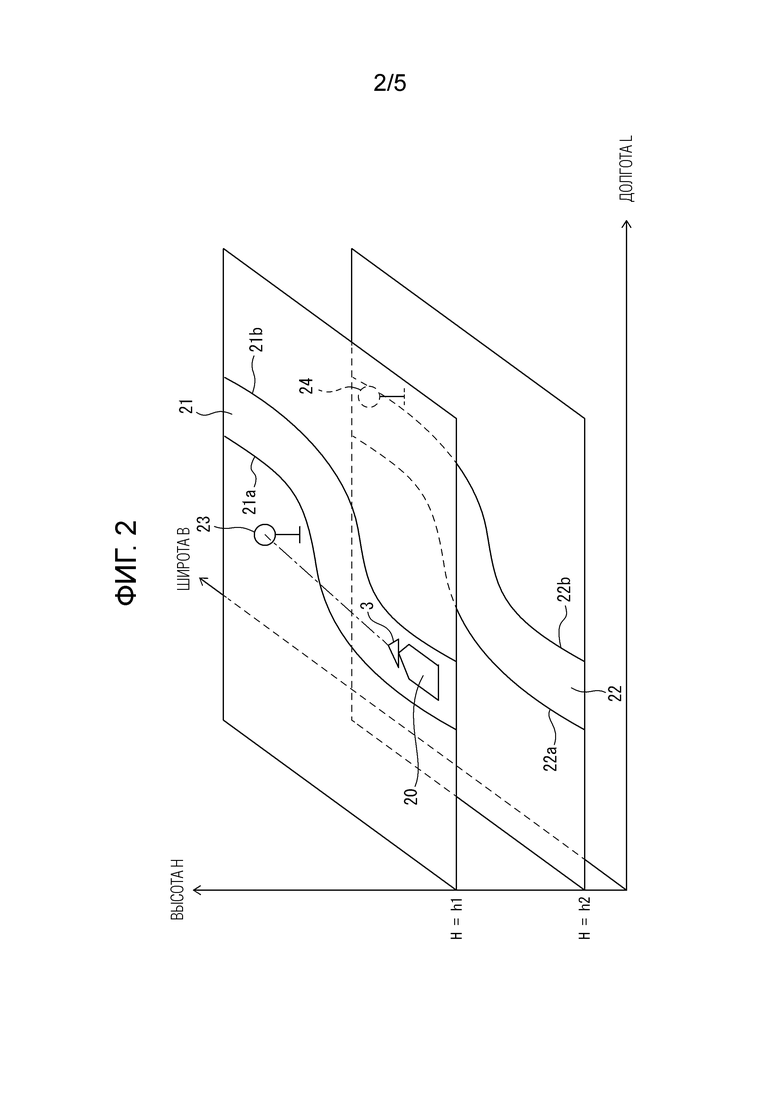
Фиг. 2 - пояснительная схема примера способа оценки собственного местоположения согласно варианту осуществления;
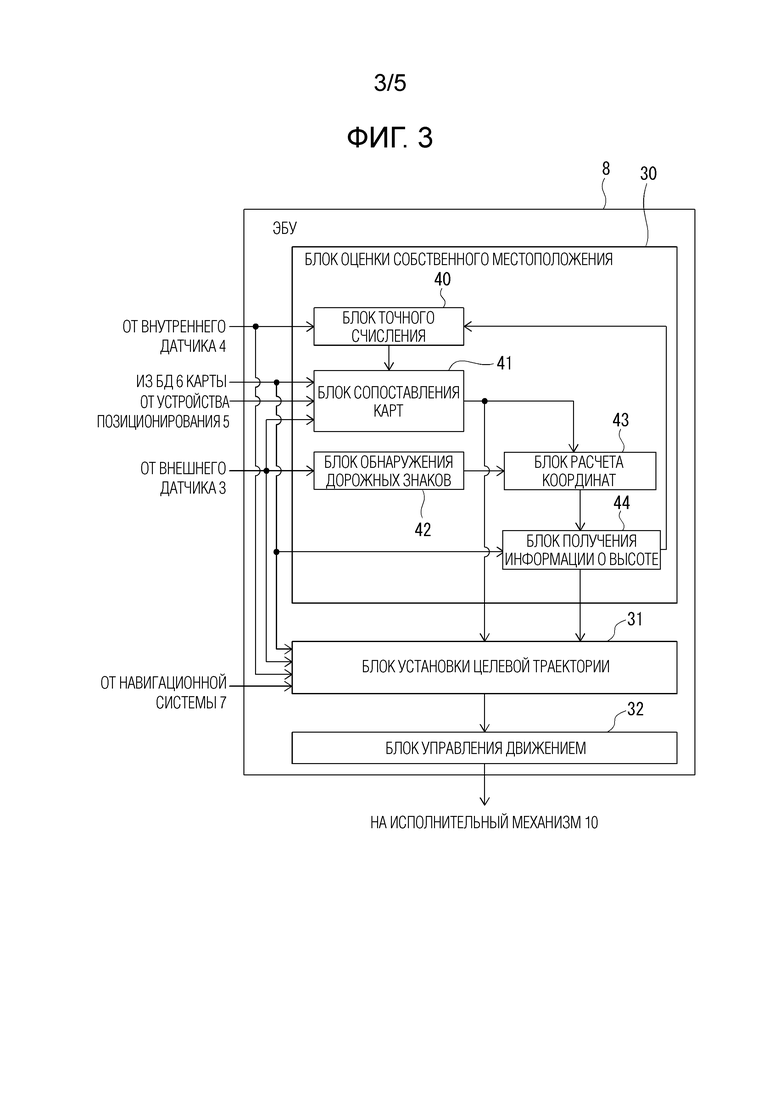
Фиг. 3 - блок-схема, иллюстрирующая пример функциональной конфигурации электронного блока управления (ЭБУ), показанного на фиг. 1;
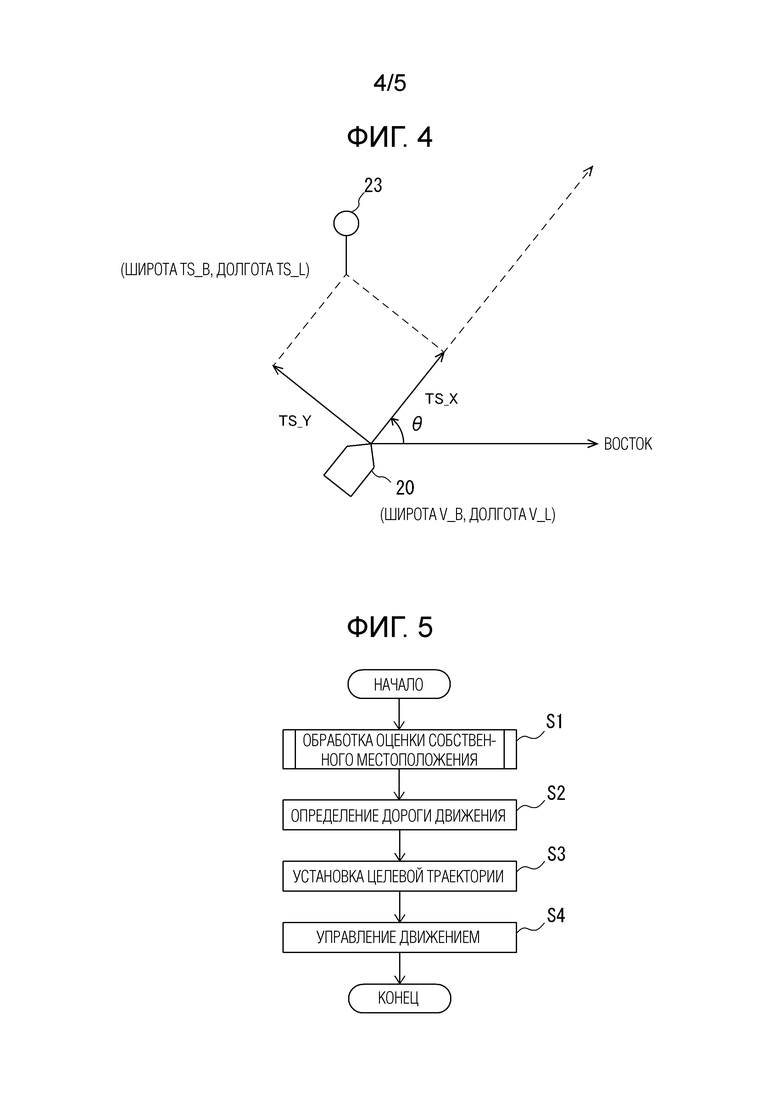
Фиг. 4 - пояснительная схема примера способа вычисления двумерных координат дорожного знака;
Фиг. 5 - блок-схема примера способа помощи при движении согласно варианту осуществления; и
Фиг. 6 - блок-схема примера способа оценки собственного местоположения, показанного на фиг. 5.
Описание вариантов осуществления изобретения
[0008] Теперь со ссылкой на чертежи будет описан вариант осуществления настоящего изобретения.
Конфигурация
Теперь будет сделана ссылка на фиг. 1. Устройство 1 помощи при движении выполняет автоматическое управление движением для обеспечения транспортного средства (в дальнейшем именуемого «транспортное средство»), на котором установлено устройство 1 помощи при движении, автоматическим приводом без участия водителя и управления системой помощи при движении для оказания помощи водителю в управлении транспортным средством на основе условий движения в окрестностях транспортного средства.
Управление помощью при движении может включать в себя не только управление движением, такое как автоматическое рулевое управление, автоматическое торможение, управление движением с постоянной скоростью и управление удержанием полосы движения, но также вывод сообщения, побуждающего водителя выполнить операцию рулевого управления или операцию замедления.
[0009] Устройство 1 помощи при движении включает в себя внешние датчики 3, внутренние датчики 4, устройство 5 позиционирования, базу 6 данных карты, навигационную систему 7, электронный блок управления (ЭБУ) 8, человеко-машинный интерфейс (HMI) 9 и исполнительные механизмы 10. Следует отметить, что на прилагаемых чертежах база данных карты обозначена как «БД карт».
[0010] Внешние датчики 3 являются датчиками, которые обнаруживают окружающую среду вокруг транспортного средства, такую как объект в окрестностях транспортного средства. Внешние датчики 3 могут включать камеру 11 и устройство 12 определения дальности. Камера 11 и устройство 12 определения дальности обнаруживают окружающую среду вокруг транспортного средства, такую как объекты, существующие в окрестностях транспортного средства (например, другое транспортное средство, пешеход, белые линии, такие как линия границы полосы движения и разметка полосы движения, и наземные объекты, установленные на дороге или в непосредственной близости от дороги, такие как светофор, стоп-линия, дорожный знак, здание, опора, бордюр и пешеходный переход), взаимное расположение таких объектов относительно транспортного средства, относительные расстояния между транспортным средством и объектами и т.п.
[0011] Камера 11 может быть, например, стереокамерой. Камера 11 может состоять из монокулярных камер, и путем захвата изображений идентичного объекта с множества перспектив с использованием монокулярных камер может быть вычислено расстояние до объекта. Расстояние до объекта может быть вычислено на основе положения контакта с землей объекта, обнаруженного из захваченных изображений, полученных с помощью монокулярных камер.
Устройство 12 определения дальности может быть, например, лазерным дальномером (LRF) или радаром.
Камера 11 и устройство 12 определения дальности выводят информацию об окружающей среде, которая представляет собой информацию об обнаруженной окружающей среде, в ЭБУ 8 и навигационную систему 7.
[0012] Внутренние датчики 4 представляют собой датчики, которые определяют состояние движения транспортного средства. Внутренние датчики 4 могут включать в себя, например, датчик 13 скорости колеса и гироскопический датчик 14.
Датчик 13 скорости колеса определяет скорость колеса транспортного средства. Гироскопический датчик 14 определяет угловую скорость тангажа, угловую скорость крена и угловую скорость рыскания транспортного средства. Датчик 13 скорости вращения колеса и гироскопический датчик 14 выдают информацию о состоянии движения, которая является информацией об обнаруженном состоянии движения, в ЭБУ 8 и навигационную систему 7.
[0013] Устройство 5 позиционирования принимает радиоволны от множества навигационных спутников и, таким образом, получает текущее местоположение транспортного средства и выдает полученное текущее местоположение транспортного средства в ЭБУ 8 и навигационную систему 7. Устройство 5 позиционирования может иметь, например, приемник глобальной системы позиционирования (GPS) или другой приемник глобальной навигационной спутниковой системы (GNSS), отличный от приемника GPS.
[0014] База 6 данных карты хранит данные карты дорог. Данные дорожной карты включают формы (формы полос) и двумерные координаты (например, широту и долготу) белых линий, такие как линии границ полос и разметка полос, высота дорог и белых линий, двумерная информация о координатах (например, широта и долгота), а также информацию о высоте наземных объектов, установленных на дорогах и в окрестностях дорог, таких как светофоры, стоп-линии, дорожные знаки, здания, столбы, бордюры и пешеходные переходы.
Данные дорожной карты также могут включать в себя информацию о типах дорог, уклонах дорог, количестве полос движения, разрешенных скоростях (предельные скорости), ширине дороги, наличии или отсутствии перекрестков и т.п. В типы дорог, например, могут быть включены обычная дорога и скоростная автомагистраль.
База 6 данных карты используется ЭБУ 8 и навигационной системой 7.
[0015] Навигационная система 7 выполняет руководство по маршруту к пункту назначения, который установлен на карте водителем транспортного средства для пассажира транспортного средства. Навигационная система 7 оценивает текущее местоположение транспортного средства, используя различные типы информации, вводимой от внешних датчиков 3, внутренних датчиков 4 и устройства 5 позиционирования, генерирует маршрут к месту назначения и выполняет руководство по маршруту для пассажира. Навигационная система 7 выводит информацию о маршруте в ЭБУ 8.
[0016] ЭБУ 8 оценивает текущее местоположение транспортного средства и устанавливает целевую траекторию движения, по которой транспортное средство должно двигаться, на основе расчетного текущего местоположения, данных дорожной карты в базе 6 данных карты, информации о маршруте, выводимой из навигационной системы 7, окружающей среды и состояния движения транспортного средства. ЭБУ 8 выполняет автоматическое управление движением и управление вспомогательным движением транспортного средства на основе заданной целевой траектории движения, приводит в действие исполнительные механизмы 10 и, таким образом, управляет движением транспортного средства.
Внешние датчики 3, внутренние датчики 4, устройство 5 позиционирования, база 6 данных карты и ЭБУ 8 составляют устройство 2 оценки собственного местоположения согласно варианту осуществления изобретения.
[0017] ЭБУ 8 включает в себя процессор 15 и периферийные компоненты, такие как запоминающее устройство 16. Процессор 15 может быть, например, центральным процессором (CPU) или микропроцессором (MPU).
Запоминающее устройство 16 может включать в себя полупроводниковое запоминающее устройство, магнитное запоминающее устройство и оптическое запоминающее устройство. Запоминающее устройство 16 может включать в себя регистры, кэш-память и память, такую как постоянное запоминающее устройство (ПЗУ) и оперативное запоминающее устройство (ОЗУ), которые используются в качестве основного запоминающего устройства.
Следует отметить, что ЭБУ 8 может быть реализован с помощью функциональной логической схемы, которая реализована на полупроводниковой интегральной схеме общего назначения. Например, ЭБУ 8 может включать в себя программируемое логическое устройство (PLD), такое как программируемая вентильная матрица (FPGA) и т.п.
[0018] HMI 9 представляет собой интерфейс для ввода и вывода информации между пассажиром в транспортном средстве и навигационной системой 7 и ЭБУ 8.
HMI 9 может принимать, например, операцию ввода по вводу пункта назначения в навигационную систему 7, которую выполняет пассажир. HMI 9 может, например, выводить руководство по вождению, данное навигационной системой 7, или информацию о руководстве по дороге, основанную на данных карты дорог в окрестностях транспортного средства.
[0019] Исполнительные механизмы 10 управляют рулевым колесом, открытием акселератора и тормозным устройством транспортного средства в соответствии с управляющим сигналом, выводимым из ЭБУ 8, и тем самым формируют поведение транспортного средства.
Исполнительные механизмы 10 включают в себя исполнительный механизм 17 рулевого управления, исполнительный механизм 18 открытия акселератора и исполнительный механизм 19 управления тормозом.
Приводной механизм 17 рулевого управления регулирует направление поворота и величину поворота транспортного средства. Приводной механизм 18 открытия акселератора управляет открытием акселератора транспортного средства. Приводной механизм 19 управления тормозом управляет тормозным действием тормозного устройства транспортного средства.
[0020] Далее будет описана схема обработки оценки собственного местоположения, выполняемой ЭБУ 8. Теперь будет сделана ссылка на фиг. 2. Ссылочной позицией 20 обозначено транспортное средство, на котором установлено устройство 1 помощи при движении. Ссылочными позициями 21 и 22 обозначены дороги, существующие на разных высотах h1 и h2, соответственно, ссылочными позициями 21a и 21b обозначены линии границы полос (белые линии) на дороге 21, а ссылочными позициями 22a и 22b обозначены линии границы полосы движения (белые линии) на дороге 22. Теперь предполагается случай, когда транспортное средство 20 находится на дороге 21.
[0021] Когда двумерные местоположения дорог 21 и 22, которые существуют на разных высотах, близки друг к другу, становится невозможным определить, на какой дороге находится транспортное средство 20, только на основе информации двумерных координат.
Хотя можно предположить, что для оценки собственного местоположения, включая высоту, сопоставление карты выполняется в трехмерном пространстве (например, пространстве, представленном широтой, долготой и высотой), сопоставление трехмерной карты требует высокой затраты вычислений. Следовательно, предпочтительно иметь возможность оценивать собственное местоположение, включая высоту, без выполнения сопоставления трехмерной карты. В качестве технологии оценки собственного местоположения был известен точный расчет на основе скорости вращения колеса и угловой скорости.
[0022] Однако при оценке собственного местоположения с использованием точного счисления накапливается ошибка, вызванная ошибкой измерения. Следовательно, необходимо получить наблюдаемое значение высоты из некоторого источника информации и скорректировать оценочное значение, вычисленное с использованием точного счисления, на наблюдаемое значение.
Таким образом, устройство 1 помощи при движении получает информацию о высоте дорожного знака 23 рядом с транспортным средством 20, которое находится на дороге 21, из базы данных карты и оценивает высоту, на которой находится транспортное средство 20, на основе информации о высоте дорожного знака 23.
[0023] В частности, относительное расположение дорожного знака 23 по отношению к транспортному средству 20 определяется с помощью внешних датчиков 3. ЭБУ 8 определяет текущее местоположение транспортного средства 20. Например, ЭБУ 8 оценивает текущее местоположение транспортного средства 20 с использованием точного счисления на основе скорости вращения колеса, определенной датчиком 13 скорости колеса, и угловой скорости тангажа, угловой скорости крена и угловой скорости рыскания, обнаруженных посредством гироскопического датчика 14. Например, ЭБУ 8 может измерять текущее местоположение транспортного средства 20, используя устройство 5 позиционирования.
[0024] ЭБУ 8 получает информацию о высоте дорожного знака 23 из базы 6 данных карты, в которой записывается информация о двумерных координатах (например, долгота и широта) и информация о высоте дорожных знаков 23 и 24, находящихся в окрестностях дорог, на основе двумерных координат текущего местоположения транспортного средства 20 и относительного расположения дорожного знака 23.
ЭБУ 8 оценивает высоту, на которой находится транспортное средство 20, на основе информации о высоте, полученной из базы 6 данных карты. Например, ЭБУ 8 оценивает высоту, указанную информацией о высоте, полученной из базы 6 данных карты, как высоту, на которой находится транспортное средство 20.
[0025] Корректировка оценочного значения высоты, вычисленной с использованием точного счисления, с оценкой высоты таким образом позволяет предотвратить накопление ошибки, вызванной ошибкой измерения.
Кроме того, поскольку высоту можно оценить без выполнения сопоставления трехмерной карты, можно сохранить низкие вычислительные затраты.
[0026] Кроме того, поскольку высота оценивается на основе информации о координатах дорожного знака 23, записанной в базе 6 данных карты, можно правильно оценить высоту, на которой находится транспортное средство 20, даже если существуют соответственно отдельные дороги одного типа на разной высоте и двумерное расположение дорог близко друг к другу.
Следует отметить, что, как показано на фиг. 2, дорожный знак 24 установлен на дороге 22, которая находится на высоте, отличной от высоты дороги 21, на которой также находится транспортное средство 20. Однако, поскольку дорожный знак 24 защищен от транспортного средства 20 на дороге 21 дорожной структурой, внешние датчики 3 не могут обнаружить дорожный знак 24. Следовательно, ошибочная оценка высоты, на которой находится транспортное средство 20, на основе информации о высоте дорожного знака 24, который установлен на дороге 22, отличной от дороги 21, никогда не происходит. Таким образом, информация о высоте дорожного знака не обязательно должна быть числовым значением, представляющим высоту, и она может быть сконфигурирована для получения информации, указывающей, на какой из дорог, которые расположены близко друг к другу, установлен дорожный знак. Например, когда обнаружен дорожный знак 23, можно получить информацию, указывающую, что место установки дорожного знака 23 находится на дороге 21, и определить, что транспортное средство 20 движется по одному из существующих на большей высоте дорог, близких друг к другу. С другой стороны, когда обнаружен дорожный знак 24, можно получить информацию, указывающую, что место установки дорожного знака 24 находится на дороге 22, и определить, что транспортное средство 20 движется по другой, находящейся на меньшей высоте, из близких друг к другу дорог.
[0027] Далее будет описана функциональная конфигурация ЭБУ 8 со ссылкой на фиг. 3. ЭБУ 8 включает в себя блок 30 оценки собственного местоположения, блок 31 установки целевой траектории и блок 32 управления перемещением. Функции модуля 30 оценки собственного местоположения, модуля 31 установки целевой траектории и модуля 32 управления перемещением могут быть реализованы, например, процессором 15 ЭБУ 8, выполняющим компьютерные программы, хранящиеся в запоминающем устройстве 16.
[0028] Блок 30 оценки собственного местоположения оценивает собственное местоположение транспортного средства на основе различной информации, вводимой от внешних датчиков 3, внутренних датчиков 4 и устройства 5 позиционирования, и информации, полученной со ссылкой на базу 6 данных карты.
Блок 30 оценки собственного местоположения включает в себя блок 40 точного счисления, блок 41 сопоставления карты, блок 42 обнаружения дорожных знаков, блок 43 вычисления координат и блок 44 получения информации о высоте.
[0029] Блок 40 точного счисления вычисляет прогнозируемое местоположение транспортного средства в текущий момент времени, используя точный расчет на основе скорости колеса, угловой скорости тангажа, угловой скорости крена и угловой скорости рыскания, обнаруженных внутренними датчиками 4. Прогнозируемое местоположение транспортного средства включает в себя двумерные координаты, высоту и азимут прямого направления транспортного средства.
Блок 40 точного счисления выводит вычисленное прогнозируемое местоположение в блок 41 сопоставления карты.
[0030] В этой обработке блок 40 точного счисления вычисляет двумерные координаты в двумерной системе координат, используемой в базе 6 данных карты. В дальнейшем двумерная система координат, используемая в базе 6 данных карты, упоминается как «система координат карты».
Хотя в нижеследующем описании будет описан пример, в котором двумерная система координат, используемая в базе 6 данных карты, является географической системой координат, в которой координаты представлены широтой и долготой, двумерная система координат не ограничена географической системой координат, и может использоваться другая система координат, такая как плоская прямоугольная система координат и полярная система координат.
[0031] Блок 41 сопоставления карты вычисляет на основе относительного местоположения наземных объектов в окрестностях транспортного средства и относительного местоположения белых линий, которые обнаруживаются внешними датчиками 3, и прогнозируемого местоположения транспортного средства, которое вычисляется с помощью блока 40 точного счисления, двумерные координаты в системе координат карты наземных объектов и белых линий.
Блок 41 сопоставления карты сопоставляет двумерные координаты наземных объектов и белые линии с базой 6 данных карты, используя сопоставление двумерной карты, и вычисляет значение коррекции сопоставления местоположения транспортного средства по каждому из следующих значений: широта, долгота и азимут.
[0032] Блок 41 сопоставления карты корректирует прогнозируемое местоположение транспортного средства, которое вычисляется блоком 40 точного счисления, с помощью вычисленных значений коррекции отображения и, таким образом, получает оценочное значение текущего местоположения транспортного средства.
Блок 41 сопоставления карты выводит оценочное значение текущего местоположения транспортного средства в блок 43 вычисления координат и блок 31 установки целевой траектории.
[0033] Блок 42 обнаружения дорожного знака обнаруживает относительное расположение дорожного знака, которое обнаруживается внешними датчиками 3, в непосредственной близости от транспортного средства по отношению к транспортному средству. Координата X и координата Y относительного местоположения дорожного знака обозначаются как «TS_X [м]» и «TS_Y [м]», соответственно.
Блок 42 обнаружения дорожного знака выводит относительное местоположение дорожного знака в блок 43 вычисления координат.
[0034] Блок 43 вычисления координат вычисляет оценочные значения двумерных координат дорожного знака в системе координат карты.
Как показано на фиг. 4 широта и долгота дорожного знака обозначены как «TS_B [рад]» и «TS_L [рад]», соответственно.
Широта и долгота оценочного значения текущего местоположения транспортного средства и азимут прямого направления транспортного средства, которые получены блоком 41 сопоставления карты, обозначаются как «V_B [рад]», «V_L [рад] и «Ɵ [рад]», соответственно.
[0035] Блок 43 вычисления координат вычисляет оценочные значения двумерных координат (TS_B [рад], TS_L [рад]) дорожного знака путем аппроксимации в соответствии со следующими формулами (1) и (2):


В приведенных выше формулах M обозначает радиус кривизны меридиана [м], а N обозначает радиус кривизны основной вертикали [м] на широте V_B.
Блок 43 вычисления координат выводит оценочные значения двумерных координат (TS_B [рад], TS_L [рад]) дорожного знака в блок 44 получения информации о высоте.
[0036] Блок 44 получения информации о высоте сопоставляет двумерные координаты (TS_B [рад], TS_L [рад]) дорожного знака, вычисленные блоком 43 вычисления координат, с двумерной информацией координат дорожных знаков, записанной в базе 6 данных карты.
Когда дорожный знак, который имеет информацию о двумерных координатах, которая соответствует двумерным координатам (TS_B [рад], TS_L [рад]), которые вычисляются блоком 43 вычисления координат, существует в базе 6 данных карты, блок 44 получения информации о высоте получает информацию о координатах (широта TS_M_B [рад], долгота TS_M_L [рад] и высота TS_M_H [m]) соответствующего дорожного знака из базы 6 данных карты.
[0037] В приведенной выше обработке случаи, когда двумерные координаты (TS_B [рад], TS_L [рад]) и двумерные координаты (TS_M_B [рад], TS_M_L [рад]) совпадают друг с другом, включают не только случай, когда две двумерные координаты полностью совпадают друг с другом, но также и случай, когда разность между двумя двумерными координатами меньше заданного значения.
Информация о высоте (TS_M_H [м]) дорожного знака может быть информацией о высоте земли (то есть основания) в точке установки дорожного знака или информацией о высоте знаковой таблички дорожного знака.
[0038] Следует отметить, что дорожный знак, информация о высоте которого должна быть получена, может быть, например, информационным знаком, знаком предупреждения об опасности, нормативным знаком или указателем направления.
Блок 44 получения информации о высоте оценивает, что высота, на которой находится транспортное средство, является высотой, которую указывает информация о высоте дорожного знака, полученная из базы 6 данных карты. Блок 44 получения информации о высоте может обновлять оценочное значение высоты, на которой находится транспортное средство, с использованием фильтра Калмана на основе информации о высоте дорожного знака, полученной множество раз в разные моменты времени.
Блок 44 получения информации о высоте выводит оценочную высоту, на которой находится транспортное средство, в блок 40 точного счисления и блок 31 установки целевой траектории.
[0039] Блок 40 точного счисления корректирует прогнозируемое значение высоты, на которой находится транспортное средство, которое вычисляется с использованием точного счисления, в соответствии с высотой, оцененной блоком 44 получения информации о высоте. Например, блок 40 точного счисления корректирует (перезаписывает) прогнозируемое значение высоты, на которой находится транспортное средство, которое вычисляется с использованием точного счисления, с высотой, оцененной блоком 44 получения информации о высоте, и вычисляет последующее прогнозируемое местоположение транспортного средства на основе скорректированной высоты.
Блок 40 точного счисления может корректировать прогнозируемое значение высоты, на которой находится транспортное средство, которое вычисляется с использованием точного счисления, согласно высоте, оцененной блоком 44 получения информации о высоте, каждый раз, когда транспортное средство проезжает заданное расстояние. Эта конфигурация позволяет эффективно корректировать погрешность точного счисления, которая накапливается в зависимости от пройденного расстояния.
[0040] Блок 31 установки целевой траектории устанавливает целевую траекторию движения, по которой транспортное средство должно двигаться, на основе текущего местоположения транспортного средства, оцененного блоком 41 сопоставления карт, данных дорожной карты в базе 6 данных карты, вывода информации о маршруте от навигационной системы 7, окружающей среды, обнаруженной внешними датчиками 3, и состояния движения транспортного средства, обнаруженного внутренними датчиками 4.
В этом случае блок 31 установки целевой траектории определяет дорогу, на которой находится транспортное средство, на основе двумерных координат текущего местоположения транспортного средства, оцененного блоком 41 сопоставления карты, и оцененной высоты, на которой находится транспортное средство, блоком 44 получения информации о высоте. Например, когда множество дорог, высота которых отличается друг от друга, существует в двумерных координатах текущего местоположения транспортного средства, блок 31 установки целевой траектории определяет, на какой из множества дорог находится транспортное средство на основе высоты, на которой находится транспортное средство, которая оценивается блоком 44 получения информации о высоте.
Блок 31 установки целевой траектории устанавливает целевую траекторию движения, по которой транспортное средство движется по дороге, на которой оно находится, в соответствии с маршрутом, созданным навигационной системой 7.
[0041] Блок 31 установки целевой траектории выдает заданную целевую траекторию движения в блок 32 управления движением.
Блок 32 управления движением выполняет автоматическое управление движением и управление помощью при движении транспортного средства, приводя в действие исполнительные механизмы 10 таким образом, что транспортное средство движется по траектории движения, генерируемой блоком 31 установки целевой траектории, и тем самым приводит в действие рулевой механизм, механизм ускорения и тормозной механизм транспортного средства.
Работа
[0042] Далее будет описан пример способа помощи при движении согласно варианту осуществления со ссылкой на фиг. 5.
На этапе S1 блок 30 оценки собственного местоположения с фиг. 3 выполняет обработку оценки собственного местоположения для оценки текущего местоположения транспортного средства.
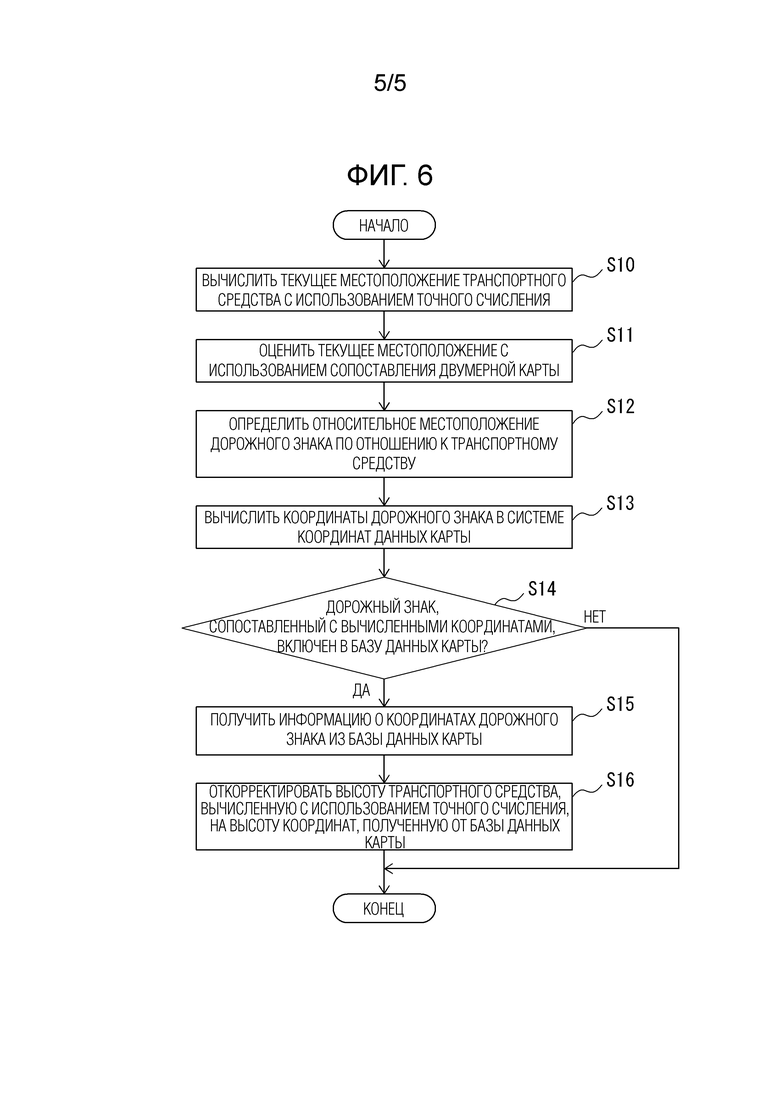
[0043] Фиг. 6 является блок-схемой примера обработки S1 оценки собственного местоположения.
На этапе S10 блок 40 точного счисления вычисляет прогнозируемое местоположение (широту, долготу, высоту и азимут) транспортного средства в текущий момент времени с использованием точного счисления на основе скорости колеса, угловой скорости тангажа, углового скорости крена и угловой скорости рыскания, определяемых внутренними датчиками 4.
На этапе S11 блок 41 сопоставления карты вычисляет на основе относительного местоположения наземных объектов в окрестностях транспортного средства и относительных местоположений белых линий, которые обнаруживаются внешними датчиками 3, прогнозируемое местоположение транспортного средства, которое было рассчитана блоком 40 точного счисления, и базы 6 данных карты оценочное значение текущего местоположения транспортного средства с использованием сопоставления двумерной карты.
[0044] На этапе S12 блок 42 обнаружения дорожного знака определяет относительное местоположение (TS_X [м], TS_Y [м]) дорожного знака, которое обнаруживается внешними датчиками 3, в окрестностях транспортного средства по отношению к транспортному средству.
На этапе S13 блок 43 вычисления координат вычисляет оценочные значения (TS_B [рад], TS_L [рад]) двумерных координат дорожного знака в системе координат карты.
[0045] На этапе S14 блок 44 получения информации о высоте сопоставляет двумерные координаты (TS_B [рад], TS_L [рад]) дорожного знака, вычисленные на этапе S13, с информацией двумерных координат дорожных знаков, записанных в базе 6 данных карты. Блок 44 получения информации о высоте определяет, существует ли в базе 6 данных карты дорожный знак, который имеет информацию о двумерных координатах, совпадающую с двумерными координатами (TS_B [рад], TS_L [рад]).
[0046] Когда отсутствует дорожный знак, двумерные координаты которого совпадают с двумерными координатами (TS_B [рад], TS_L [рад]) в базе 6 данных карты (этап S14: N), обработка S1 оценки собственного местоположения завершается без корректировки высоты, вычисленной с использованием точного счисления.
Когда дорожный знак, двумерные координаты которого совпадают с двумерными координатами (TS_B [рад TS_L [рад]), существует в базе 6 данных карты (этап S14: Y), процесс переходит к этапу S15.
[0047] На этапе S15 блок 44 получения информации о высоте получает информацию о координатах (широта TS_M_B [рад], долгота TS_M_L [рад] и высота TS_M_H [м]) дорожного знака, двумерные координаты которого соответствуют двумерным координатам (TS_B [рад], TS_L [рад]) из базы 6 данных карты. Блок 44 получения информации о высоте оценивает, что высота, на которой находится транспортное средство, является высотой (TS_M_H [м]) дорожного знака.
На этапе S16 модуль 40 точного счисления корректирует прогнозируемое значение высоты, на которой находится транспортное средство, которое было вычислено с использованием точного счисления, на высоту, оцененную модулем 44 получения информации о высоте. Впоследствии обработка S1 оценки собственного местоположения завершается.
[0048] теперь будет сделана ссылка на фиг. 5. На этапе S2 блок 31 установки целевой траектории определяет дорогу, на которой находится транспортное средство, на основе двумерных координат текущего местоположения транспортного средства, которое было оценено блоком 41 сопоставления карты, и высоты, на которой транспортное средство присутствует, что было оценено блоком 44 получения информации о высоте.
Когда множество дорог, высота которых отличается друг от друга, существует в двумерных координатах текущего местоположения транспортного средства, блок 31 установки целевой траектории определяет, на какой из множества дорог находится транспортное средство, на основе высоты, на которой находится транспортное средство, которая была оценена блоком 44 получения информации о высоте. Следует отметить, что информация о высоте транспортного средства требуется только как информация, которая позволяет определить, на какой из множества дорог, высоты которых отличаются друг от друга, находится транспортное средство в двумерных координатах текущего местоположения транспортного средства. Например, информация о высоте транспортного средства может быть информацией, которая указывает, на какой из множества различных дорог установлен дорожный знак, среди дорожных знаков, соответственно установленных на множестве дорог, которому соответствует дорожный знак, обнаруженный транспортным средством.
[0049] На этапе S3 блок 31 установки целевой траектории устанавливает целевую траекторию движения, по которой транспортное средство движется по дороге, на которой оно находится в данный момент, на основе текущего местоположения транспортного средства, которое было оценено блоком 41 сопоставления карты, данных карты дорог в базе 6 данных карты, информации о маршруте, выводимой из навигационной системы 7, окружающей среды, обнаруженной внешними датчиками 3, и состояния движения транспортного средства, обнаруженного внутренними датчиками 4.
В этом случае блок 31 установки целевой траектории устанавливает целевую траекторию движения, по которой транспортное средство движется по дороге, на которой находится транспортное средство, которая была определена на этапе S2, в соответствии с маршрутом, созданным навигационной системой 7.
[0050] На этапе S4 блок 32 управления движением выполняет управление движением, такое как автоматическое управление движением и управление помощи при движении, транспортного средства, приводя в действие исполнительные механизмы 10 таким образом, что транспортное средство движется по траектории движения, которая была сгенерирована блоком 31 установки целевой траектории.
Преимущественные эффекты варианта осуществления
[0051] (1) Блок 42 обнаружения дорожных знаков обнаруживает дорожный знак поблизости от транспортного средства. Блок 40 точного счисления и блок 41 сопоставления карты определяют текущее местоположение транспортного средства. Блок 43 вычисления координат и блок 44 получения информации о высоте получают информацию о высоте обнаруженного дорожного знака из базы 6 данных карты на основе относительного местоположения обнаруженного дорожного знака относительно транспортного средства и текущего местоположения и оценивают высоту, на которой находится транспортное средство, согласно информации о высоте.
Поскольку эта обработка позволяет оценить высоту, на которой находится транспортное средство, становится возможным определить, на какой из дорог, существующих на разных высотах, находится транспортное средство.
В частности, поскольку высота оценивается на основе информации о координатах дорожного знака 23, записанной в базе 6 данных карты, можно правильно оценить высоту, на которой находится транспортное средство 20, даже если соответственно существуют дороги того же типа на разной высоте и их двумерное расположение близко друг к другу.
[0052] (2) Блок 40 точного счисления и блок 41 сопоставления карты определяют двумерные координаты текущего местоположения в системе координат карты. Блок 43 вычисления координат вычисляет двумерные координаты обнаруженного дорожного знака в системе координат карты на основе двумерных координат относительного местоположения обнаруженного дорожного знака и текущего местоположения. Блок 44 получения информации о высоте получает информацию о высоте дорожного знака, который имеет информацию о двумерных координатах, соответствующую двумерным координатам обнаруженного дорожного знака из базы 6 данных карты, в качестве информации о высоте обнаруженного дорожного знака.
Эта обработка позволяет получить информацию о высоте дорожного знака, обнаруженного в непосредственной близости от транспортного средства, из базы 6 данных карты, в которой записываются данные двумерных координат и информация о высоте дорожных знаков, существующих в окрестностях дорог.
[0053] (3) Блок 41 сопоставления карты вычисляет двумерные координаты текущего местоположения в системе координат карты, используя сопоставление двумерной карты.
То есть блок 41 сопоставления карты вычисляет двумерные координаты текущего местоположения, используя сопоставление двумерных карт, и оценивает высоту, на которой находится транспортное средство, на основе информации о координатах дорожного знака 23, записанной в базе 6 данных карты. Поскольку благодаря этой конфигурации собственное местоположение, включая высоту, можно оценивать без выполнения сопоставления трехмерной карты, можно поддерживать низкие вычислительные затраты.
[0054] (4) Блок 40 точного счисления корректирует оценочное значение высоты, на которой находится транспортное средство, которое рассчитывается с использованием точного счисления, в соответствии с информацией о высоте, полученной из базы 6 данных карты.
Эта конфигурация позволяет предотвратить накопление ошибки в высоте, вызванной ошибкой измерения.
[0055] (5) Блок 40 точного счисления корректирует оценочное значение в соответствии с информацией о высоте, полученной из базы данных карты, каждый раз, когда транспортное средство проезжает заданное расстояние.
Такая конфигурация позволяет эффективно корректировать погрешность точного счисления, которая накапливается по мере увеличения пути.
[0056] (6) Дорожный знак, который обнаруживает блок 42 обнаружения дорожного знака, может быть информационным знаком. Такие информационные знаки часто устанавливают в местах пересечения дорог по вертикали, например, на перекрестках. Следовательно, можно надлежащим образом определить, по какой из дорог движется транспортное средство на участке, где дороги пересекают друг друга по вертикали.
[0057] Все примеры и условные формулировки, представленные в данном документе, предназначены для вспомогательных целей, чтобы помочь читателю понять изобретение и концепции, внесенные изобретателем в развитие данной области техники, и они не должны рассматриваться как ограничения такими конкретно перечисленными примерами и условиями, а организация таких примеров в описании не связана с демонстрацией превосходства или неполноценности данного изобретения. Хотя подробно были описаны один или более вариантов осуществления настоящего изобретения, следует понимать, что в изобретение могут быть внесены различные изменения, замены и модификации, не выходящие за рамки сущности и объема данного изобретения.
Перечень ссылочных позиций
[0058] 1 - устройство помощи при движении
2 - устройство оценки собственного местоположения
3 - внешний датчик
4 - внутренний датчик
5 - устройство позиционирования
6 - база данных карты
7 - навигационная система
10 - исполнительный механизм
11 - камера
12 - устройство для определения дальности
13 - датчик скорости колеса
14 - гироскопический датчик
15 - процессор
16 - запоминающее устройство
17 - приводной механизм рулевого управления
18 - приводной механизм открытия акселератора
19 - приводной механизм управления тормозом
20 - транспортное средство
21, 22 - дорога
21a, 21b, 22a, 22b - линия границы полосы (белая линия)
23, 24 - дорожный знак
30 - блок оценки собственного местоположения
31 - блок установки целевой траектории
32 - блок управления движением
40 - блок точного счисления
41 - блок сопоставления карт
42 - блок обнаружения дорожных знаков
43 - блок расчета координат
44 - блок получения информации о высоте.
Изобретение относится к способу оценки собственного местоположения и устройству оценки собственного местоположения. Способ оценки собственного местоположения включает обнаружение дорожного знака вблизи транспортного средства, определение текущего местоположения транспортного средства, получение информации о высоте обнаруженного дорожного знака из данных карты, в которых записана информация о двумерных координатах и информация о высоте дорожного знака, находящегося вблизи дороги, на основе относительного местоположения обнаруженного дорожного знака по отношению к транспортному средству и текущего местоположения, и оценку высоты, на которой находится транспортное средство, согласно информации о высоте, полученной из данных карты. Технический результат – обеспечение возможности определения того, на какой одной из дорог, расположенных на разной высоте, находится транспортное средство. 2 н. и 5 з.п. ф-лы, 6 ил.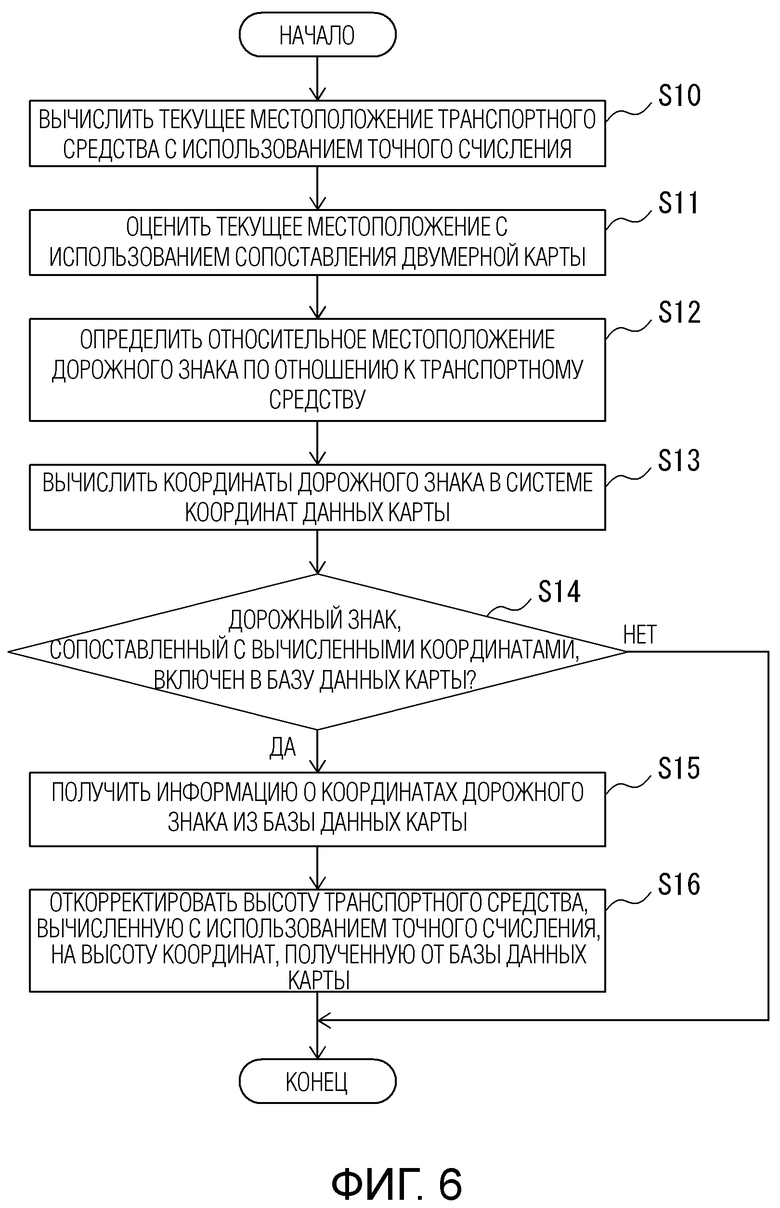
1. Способ оценки собственного местоположения, включающий:
обнаружение дорожного знака вблизи транспортного средства;
определение текущего местоположения транспортного средства;
получение информации о высоте обнаруженного дорожного знака из данных карты, в которых записаны информация о двумерных координатах дорожной полосы и информация о двумерных координатах и информация о высоте дорожного знака, находящегося вблизи дороги, на основе относительного местоположения обнаруженного дорожного знака относительно транспортного средства и текущего местоположения;
оценку высоты, на которой находится транспортное средство, согласно информации о высоте, полученной из данных карты;
определение, когда множество дорог, высоты которых отличаются друг от друга, находится в двумерной координате текущего местоположения транспортного средства, на какой одной из множества дорог находится транспортное средство, на основе оцененной высоты;
установку целевой траектории движения транспортного средства на основе двумерной координаты полосы и двумерной координаты текущего местоположения транспортного средства таким образом, чтобы транспортное средство двигалось по маршруту в системе двумерных координат, сгенерированном навигационной системой на полосе дороги из множества дорог, на которой находится транспортное средство; и
приведение в действие исполнительного механизма для управления рулевым механизмом транспортного средства таким образом, чтобы транспортное средство двигалось по целевой траектории движения.
2. Способ оценки собственного местоположения по п.1, включающий:
определение двумерной координаты текущего местоположения в системе координат данных карты;
вычисление двумерной координаты обнаруженного дорожного знака в системе координат на основе двумерной координаты относительного местоположения обнаруженного дорожного знака и текущего местоположения; и
получение информации о высоте дорожного знака, имеющей информацию о двумерных координатах, соответствующую двумерной координате обнаруженного дорожного знака, из данных карты в качестве информации о высоте обнаруженного дорожного знака.
3. Способ оценки собственного местоположения по п.2, включающий вычисление двумерной координаты текущего местоположения в системе координат с использованием сопоставления двумерной карты.
4. Способ оценки собственного местоположения по любому из пп.1-3, включающий корректировку оценочного значения высоты, на которой находится транспортное средство, при этом оценочное значение вычисляют с использованием точного счисления в соответствии с информацией о высоте, полученной из данных карты.
5. Способ оценки собственного местоположения по п.4, включающий корректировку оценочного значения в соответствии с информацией о высоте, полученной из данных карты, каждый раз, когда транспортное средство проезжает заданное расстояние.
6. Способ оценки собственного местоположения по любому из пп.1-5, при котором дорожный знак является информационным знаком.
7. Устройство оценки собственного местоположения, содержащее:
датчик, выполненный с возможностью обнаружения дорожного знака вблизи транспортного средства,
приводной механизм для управления рулевым механизмом транспортного средства и
контроллер, выполненный с возможностью:
- определения текущего местоположения транспортного средства;
- получения информации о высоте обнаруженного дорожного знака из данных карты, в которых записаны информация о двумерных координатах дорожной полосы и информация о двумерных координатах и информация о высоте дорожного знака, находящегося вблизи дороги, на основе относительного местоположения обнаруженного дорожного знака относительно транспортного средства и текущего местоположения;
- оценки высоты, на которой находится транспортное средство, согласно информации о высоте, полученной из данных карты;
- определения, когда в двумерных координатах текущего местоположения транспортного средства имеется множество дорог, высоты которых отличаются друг от друга, на какой одной из множества дорог находится транспортное средство, на основе оцененной высоты;
- установки целевой траектории движения транспортного средства на основе двумерной координаты полосы и двумерной координаты текущего местоположения транспортного средства таким образом, чтобы транспортное средство двигалось по маршруту в системе двумерных координат, сгенерированном навигационной системой на полосе дороги из множества дорог, на которой находится транспортное средство; и
- приведения в действие исполнительного механизма для управления рулевым механизмом транспортного средства таким образом, чтобы транспортное средство двигалось по целевой траектории движения.
| JP 2007108043 A, 26.04.2007 | |||
| US 9062979 B1, 23.06.2015 | |||
| JP 2006275619 A, 12.10.2006 | |||
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В ПУТИ | 2015 |
|
RU2611455C1 |

