ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к устройству оценки положения транспортного средства и способу оценки положения транспортного средства.
УРОВЕНЬ ТЕХНИКИ
Традиционная технология, раскрытая в PTL 1, является технологией, в которой подвижный робот, движущийся автономно, оценивает положение транспортного средства согласно величине перемещения и, сопоставляя проезд, выявленный посредством сканирования лазером, с картографической информацией, полученной заблаговременно, выполняет поправку оцененного положения транспортного средства. Выявленный проезд и картографическая информация обрабатываются в качестве двумерных данных, когда рассматриваются на виде сверху, и, при выполнении сопоставления между ними, используются только данные на предопределенной дальности от текущего местоположения.
Список цитируемых материалов
Патентная литература
PTL 1: JP 2008-250906 A
Сущность изобретения
Техническая Проблема
Для выявления целевого объекта, такого как белая линия и линия бордюрного камня, и, посредством сопоставления выявленного целевого объекта с картографической информацией, расчета положения транспортного средства (абсолютных координат на карте) у транспортного средства, требуется опорная точка для сопоставления целевого объекта с картографической информацией. Например, когда выявляется белая линия, продолжающаяся только по прямой линии, белая линия, продолжающаяся по прямой линии в направлении движения, служит в качестве опорной точки в направлении ширины транспортного средства, но не служит в качестве опорной точки в направлении движения, и, таким образом, сопоставление с картографической информацией не может точно выполняться в направлении движения. Поэтому, когда применяется конфигурация, в которой удерживаются в памяти данные положений целевого объекта только на предопределенной дальности от текущего местоположения, есть вероятность, что, например, когда имеются в распоряжении только данные, относящиеся к белой линии, продолжающейся по прямой линии в пределах предопределенной дальности от текущего местоположения, нет пригодных данных положений целевого объекта, служащих в качестве опорной точки в направлении движения, что делает невозможным получение точного положения транспортного средства у транспортного средства. Однако, удерживание в памяти всех выявленных данных положений целевого объекта не является практичным, так как действие таким образом побуждает требуемую емкость запоминающего устройства быть значительной.
Цель настоящего изобретения состоит в том, чтобы, наряду с сохранением точности оценки положений транспортного средства, давать количеству данных положений целевого объекта возможность регулироваться надлежащим образом.
Решение проблемы
Устройство оценки положения транспортного средства согласно одному из аспектов настоящего изобретения выявляет положения целевого объекта, присутствующего на периферии транспортного средства, и, вместе с этим, выявляет величины перемещений транспортного средства и сохраняет положения целевого объекта в качестве данных положений целевого объекта на основании величин перемещений. В дополнение, устройство оценки положения транспортного средства получает картографическую информацию, в том числе положения целевого объекта и, посредством сопоставления данных положений целевого объекта с положениями целевого объекта в картографической информации, оценивает положение транспортного средства у транспортного средства. Кроме того, устройство оценки положения транспортного средства выявляет точку поворота транспортного средства по величинам перемещений транспортного средства. Более того, устройство оценки положения транспортного средства удерживает в памяти по меньшей мере данные положений целевого объекта в диапазоне, идущем назад от текущего местоположения на предопределенное первое заданное расстояние, и данные положений целевого объекта в диапазоне, идущем назад от точки поворота на предопределенное второе заданное расстояние.
Полезные результаты изобретения
Согласно настоящему изобретению, поскольку удерживаются в памяти данные положений целевого объекта в диапазоне, идущем назад от текущего местоположения на первое заданное расстояние, и данные положений целевого объекта в диапазоне, идущем назад от точки поворота на второе заданное расстояние, посредством сопоставления данных положений целевого объекта с картографической информацией, что касается точки поворота, используемой в качестве опорной точки, может оцениваться положение транспортного средства. В дополнение, поскольку другие данные положений целевого объекта не должны удерживаться в памяти, количество данных у данных положений целевого объекта может регулироваться надлежащим образом.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 - схема конфигурации устройства оценки положения транспортного средства;
фиг. 2 - схема, иллюстрирующая компоновку радиолокационных устройств и камер;
фиг. 3 - схема, иллюстрирующая диапазоны сканирования радиолокационных устройств и диапазоны формирования изображений камер;
фиг. 4 - схема, иллюстрирующая систему координат транспортного средства;
фиг. 5 - схема, иллюстрирующая систему координат счисления пути;
фиг. 6 - схема, иллюстрирующая положения целевого объекта в системе координат транспортного средства;
фиг. 7 - схема, в которой траектория движения связана с положениями целевых объектов;
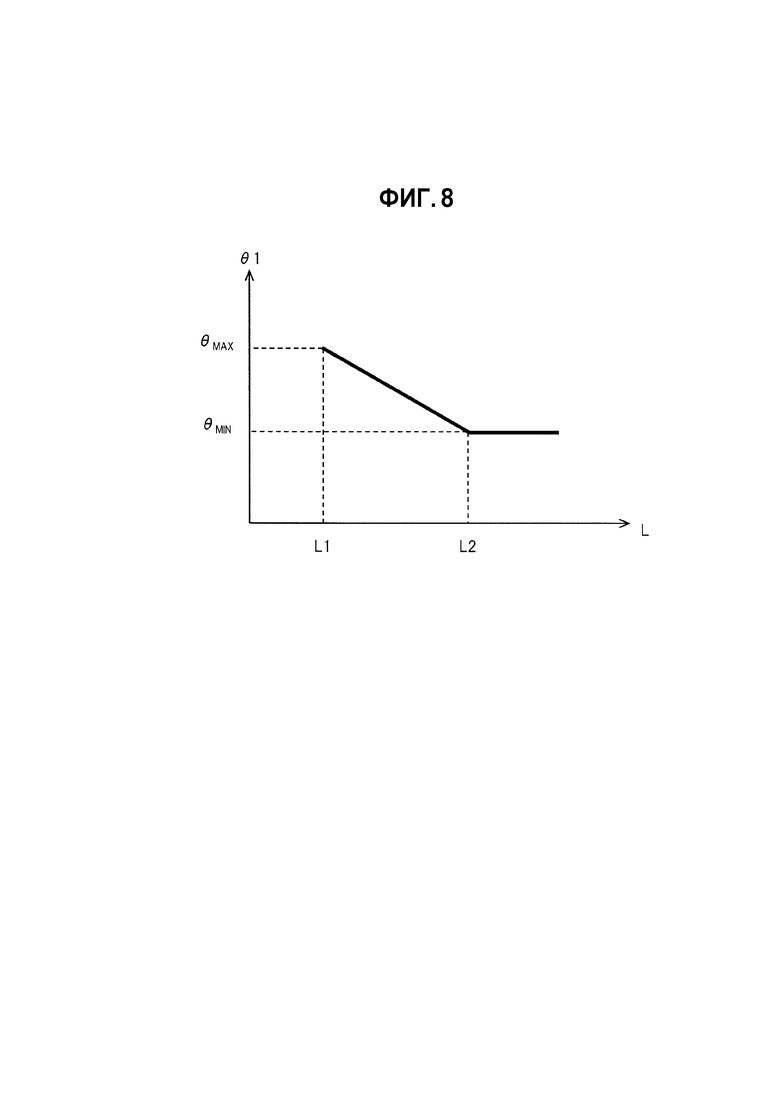
фиг. 8 - отображение, используемое для установки заданного угла θ1 согласно протяженности L прямой линии;
фиг. 9 - схема, описывающая установку точки Pt1 поворота;
фиг. 10A и 10B - схемы, описывающие определение виляния;
фиг. 11 - схема, иллюстрирующая участки, для которых удерживаются в памяти данные положений целевого объекта, и участки, для которых данные положений целевого объекта удаляются или прореживаются;
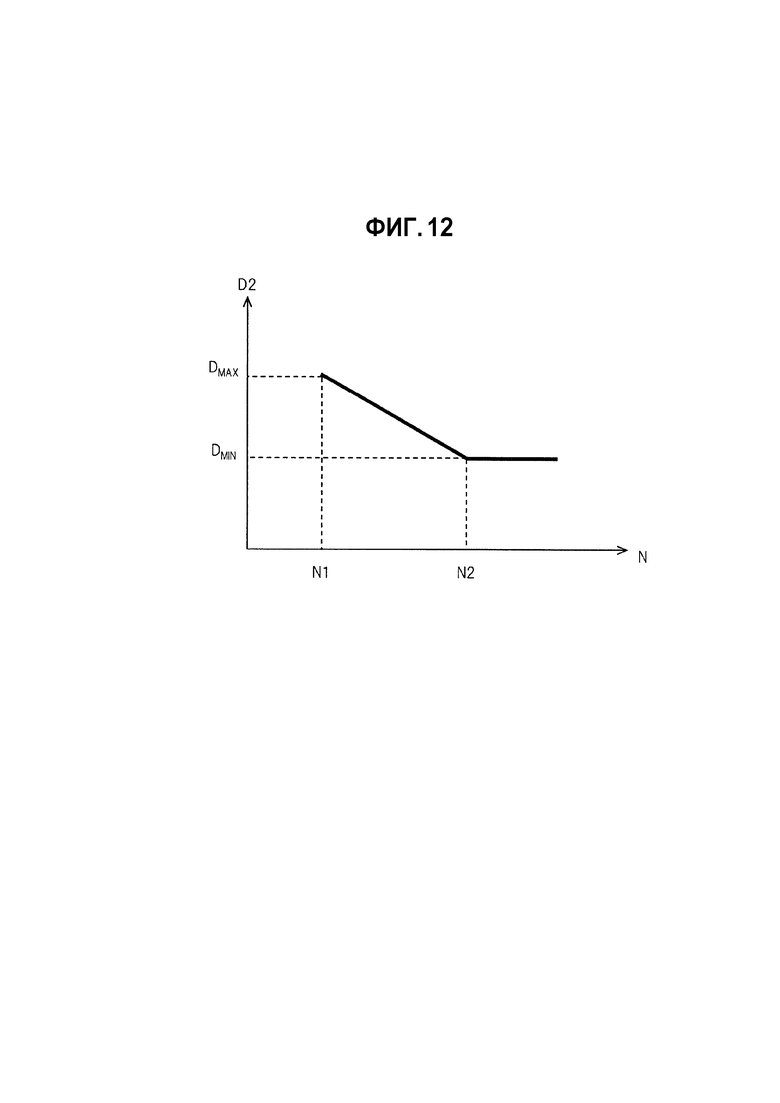
фиг. 12 - отображение, используемое для установки заданного расстояния D2 согласно количеству N меток целевого объекта;
фиг. 13 - схема, иллюстрирующая заданное расстояние D3;
фиг. 14 - блок-схема последовательности операций способа, иллюстрирующая обработку оценки положения транспортного средства;
фиг. 15A и 15B - схемы, иллюстрирующие удерживание в памяти данных положений целевого объекта только в пределах предопределенного диапазона;
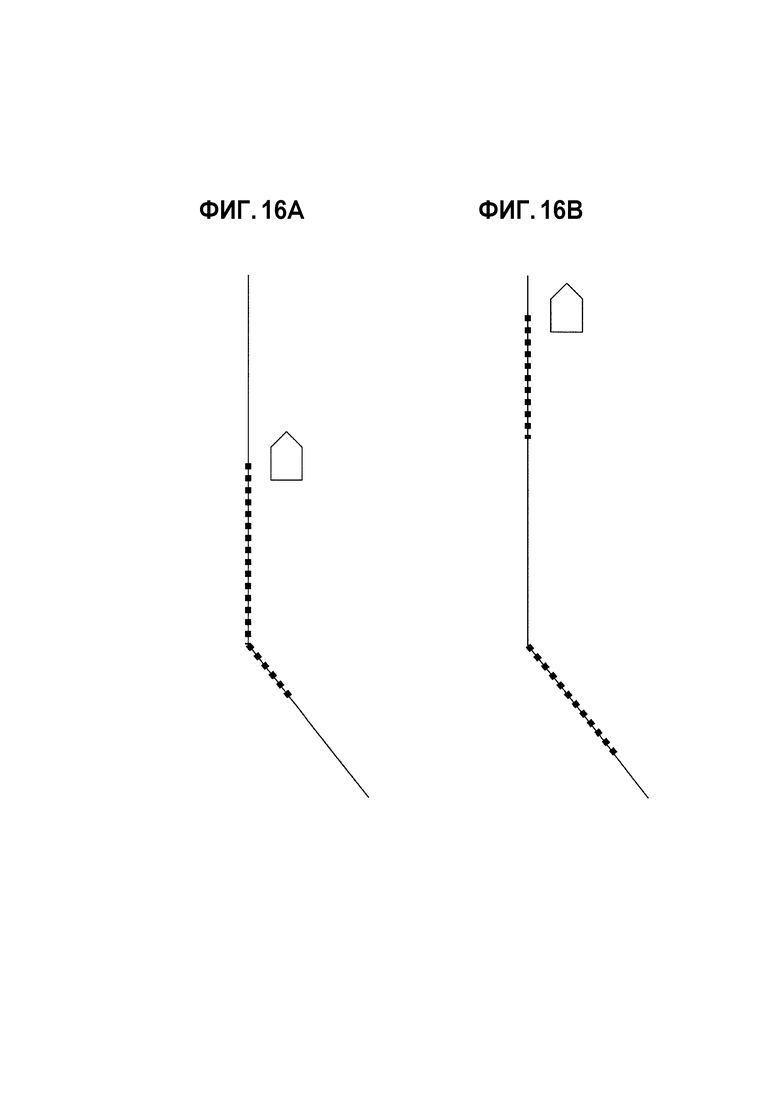
фиг. 16A и 16B - схемы, иллюстрирующие концепцию варианта осуществления;
фиг. 17 - схема, иллюстрирующая, на основании точки Pt2 поворота, участки, для которых удерживаются в памяти данные положений целевого объекта, и участки, для которых данные положений целевого объекта удаляются или прореживаются;
фиг. 18 - схема, иллюстрирующая состояние, в котором выявляется множество точек поворота; и
фиг. 19 - отображение, используемое для установки заданного угла θ1 согласно количеству N меток целевого объекта.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Вариант осуществления настоящего изобретения далее будет описан со ссылкой на чертежи. Отметим, что чертежи являются схематическими и иногда отличаются от реальных вариантов осуществления. В дополнение, нижеследующий вариант осуществления указывает устройства и способы для воплощения технической идеи настоящего изобретения в качестве примера и не ограничивает конфигурацию описанной ниже. Другими словами, техническая идея настоящего изобретения может быть подвергнута многообразию изменений в пределах технического объема, предписанного формулой изобретения.
<Первый вариант осуществления>
<Конфигурация>
Фиг. 1 - схема конфигурации устройства оценки положения транспортного средства.
Устройство 11 оценки положения транспортного средства является устройством, выполненным с возможностью оценивать положение транспортного средства у транспортного средства, и включает в себя радиолокационные устройства 12, камеры 13, базу 14 данных карт, группу 15 датчиков и контроллер 16.
Фиг. 2 - схема, иллюстрирующая компоновку радиолокационных устройств и камер.
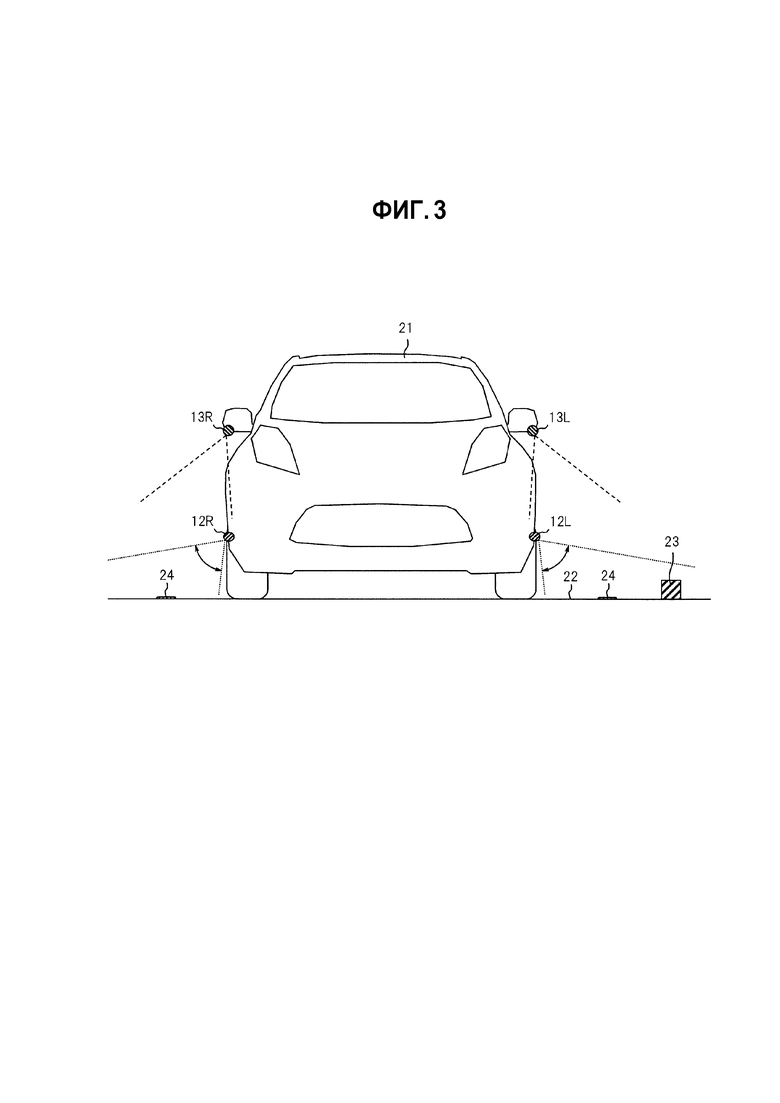
Фиг. 3 - схема, иллюстрирующая диапазоны сканирования радиолокационных устройств и диапазоны формирования изображений камер.
Каждое радиолокационное устройство 12 имеет конфигурацию, например, включающую в себя лазерный дальномер (LRF), измеряет расстояние и направление до объекта, который присутствует сбоку от транспортного средства 21, и выводит измеренные данные в контроллер 16. Радиолокационные устройства 12 расположены всего в двух местах, на левой боковой поверхности и правой боковой поверхности транспортного средства 21. Когда два радиолокационных устройства 12 отличимы друг от друга, радиолокационные устройства, расположенные на левой боковой поверхности и правой боковой поверхности транспортного средства 21 указываются ссылкой, соответственно, как левое боковое радиолокационное устройство 12L и правое боковое радиолокационное устройство 12R. Левое боковое радиолокационное устройство 12L и правое боковое радиолокационное устройство 12R сканируют в направлениях снизу влево и в направлениях снизу вправо, соответственно. Другими словами, каждое из левого бокового радиолокационного устройства 12L и правого бокового радиолокационного устройства 12R имеет ось поворота в продольном направлении кузова транспортного средства и сканирует в направлениях под прямым углом к оси. Эта операция выявляет расстояния и направления до поверхности 22 дороги и бордюрного камня 23, присутствующих сбоку от кузова. Бордюрный камень 23 предусмотрен на обочине дороги вдоль полосы движения для проезда в качестве граничной линии между проезжей частью дороги и тротуаром.
Каждая камера 13 имеет конфигурацию, например, включающую в себя широкоугольную камеру, использующую датчик изображений на приборах с зарядовой связью (CCD), формирует изображения боковой стороны транспортного средства 21 и выводит данные изображений в контроллер 16. Камеры 13 расположены всего в двух местах, на левом дверном зеркале и правом дверном зеркале транспортного средства 21. Когда две камеры 13 отличимы друг от друга, камеры, расположенные на левом дверном зеркале и правом дверном зеркале транспортного средства 21, соответственно указываются ссылкой как левая боковая камера 13L и правая боковая камера 13R. Левая боковая камера 13L и правая боковая камера 13R формируют изображение поверхности 22 дороги по левую сторону и правую сторону от транспортного средства 21. Эта операция выявляет элементы 24 разметки полосы движения, присутствующие сбоку от кузова транспортного средства. Элементы 24 разметки полосы движения являются разделительными линиями, такими как белые линии, которые нарисованы краской на поверхности 22 дорогой, чтобы размечать полосу движения для проезда (полосу автомобильного движения), по которой требуется, чтобы передвигалось транспортное средство 21, и размечены вдоль полосы движения для проезда. Отметим, что, хотя элементы 24 разметки полосы движения проиллюстрированы в трех измерениях в описательных целях на фиг. 3, предполагается, что элементы 24 разметки полосы движения находятся заподлицо с поверхностью 22 дороги, так как их толщина практически может считаться нулевой.
База 14 данных карт получает картографическую информацию о дороге. В картографическую информацию о дороге включена информация о положении бордюрного камня 23 и элементов 24 разметки полосы движения. Хотя является объектом, который имеет высоту, бордюрный камень 23 получается в виде двумерных данных, когда обозревается в плане. Бордюрный камень 23 и элементы 24 разметки полосы движения закодированы в данные, которые являются набором прямых линий, в которых каждая прямая линия получается в качестве информации о положении ее обеих конечных точек, а круговая дугообразная кривой, которая изгибается, рассматривается в качестве прямых линий, которые составляют ломанную линию, приближающуюся к круговой дугообразной кривой. Отметим, что база 14 данных карт может быть запоминающим носителем, который хранит картографическую информацию о дороге для навигационной системы транспортного средства или может получать картографическую информацию извне через систему связи, такую как система беспроводной связи (также применимы связь между дорожной инфраструктурой и транспортными средствами и связь между транспортными средствами) Таким образом, база 14 данных карт может периодически получать самую последнюю картографическую информацию и обновлять удерживаемую в памяти картографическую информацию. База 14 данных карт также может накапливать курсы, которыми транспортное средство фактически проехало, в качестве картографической информации.
Группа 15 датчиков, например, включает в себя приемник GPS, датчик акселератора, датчик угла поворота управляемых колес, датчик тормозов, датчик скорости транспортного средства, датчики ускорения, датчики скорости вращения колес, датчик угловой скорости рыскания, и тому подобное, и выводит соответственные выявленные данные в контроллер 16. Приемник GPS получает информацию о текущем местоположении транспортного средства 21. Датчик акселератора выявляет величину приведения в действие педали акселератора. Датчик угла поворота управляемых колес выявляет величину приведения в действие рулевого колеса. Датчик тормозов выявляет величину приведения в действие тормозной педали и давления внутри усилителя тормозов. Датчик скорости транспортного средства выявляет скорость транспортного средства. Датчики ускорения выявляют ускорение/замедление в продольном направлении и поперечном направлении транспортного средства. Датчики скорости вращения колес выявляют скорости вращения колес у соответственных колес. Датчик угловой скорости рыскания выявляет угловую скорость рыскания транспортного средства.
Контроллер 16 имеет конфигурацию, например, включающую в себя электронный блок управления (ECU), который включает в себя ЦПУ (центральное процессорное устройство, CPU), ПЗУ (постоянное запоминающее устройство, ROM), ОЗУ (оперативное запоминающее устройство, RAM), и тому подобное, и в ПЗУ записана программа, которая приводит в исполнение различные типы операционной обработки, такой как обработка оценки положения транспортного средства, которая будет описана позже. Отметим, что может быть предусмотрен контроллер 16, выделенный для обработки оценки положения транспортного средства, или другой контроллер может быть выполнен с возможностью также служить в качестве контроллера для обработки оценки положения транспортного средства.
Контроллер 16 включает в себя, в качестве составляющих функциональных блоков, блок 31 определения положений целевого объекта, блок 32 выявления величины перемещения, блок 33 хранения положений целевого объекта, блок 34 выявления точки поворота и блок 35 оценки положения транспортного средства.
Блок 31 выявления положений целевого объекта выявляет положения целевых объектов, присутствующих на периферии транспортного средства, таких как бордюрный камень 23 и элементы 24 разметки полосы движения, в качестве относительных положений по отношению к транспортному средству в системе координат транспортного средства, неподвижной относительно транспортного средства.
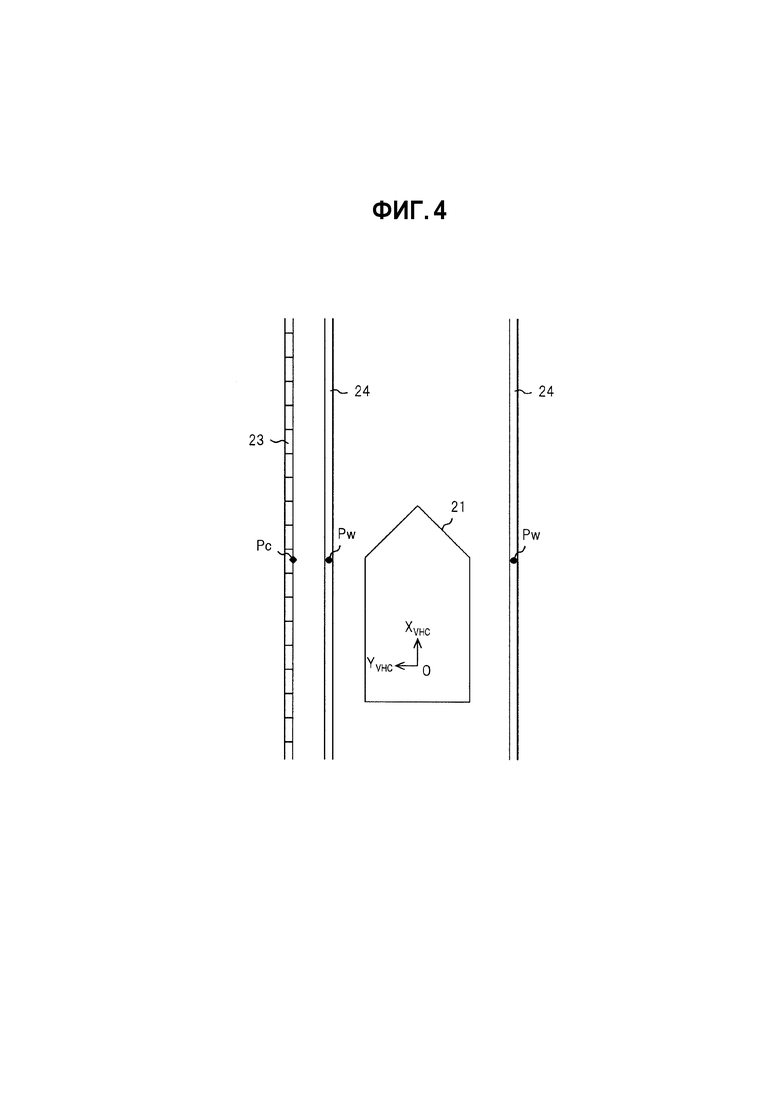
Фиг. 4 - схема, иллюстрирующая систему координат транспортного средства.
Система координат транспортного средства является двухмерными координатами, когда рассматривается на виде сверху, и, например, середина задней колесной оси, продольное направление и правое и левое направления транспортного средства 21 предполагаются, соответственно, началом O координат, осью XVHC и осью YVHC. Формула, которая преобразует системы координат радиолокационных устройств 12 и системы координат камер 13 в систему координат транспортного средства, получена заранее. В дополнение, параметры поверхности 22 дороги в системе координат транспортного средства известны заранее.
Поверхность 22 дороги сканируется лазером к наружным сторонам в направлении ширины транспортного средства посредством использования радиолокационных устройств 12, и положение, в котором большое изменение высоты (перепад уровней) наблюдается посредством сканирования, выявляется в качестве конечной точки на обочине проезжей части дороги в направлении ширины бордюрного камня 23. Другими словами, положение бордюрного камня 23 выявляется из трехмерных данных и проецируется в двухмерную систему координат транспортного средства. На фиг. 4, точка обнаружения бордюрного камня 24 обозначена Pc и указана закрашенным ромбом.
Посредством формирования изображений поверхности 22 дороги с использованием камер 13 и, в представленных полутоновых изображениях, получения рисунков, в которых яркость меняется с темного участка на яркий участок и с яркого участка на темный участок вдоль правого и левого направлений кузова транспортного средства, выявляются элементы 24 разметки полосы движения. Например, выявляются средние точки в направлении ширины элементов 24 разметки полосы движения. Другими словами, данные изображений, представленные камерами 13, преобразуются посредством преобразования вида с высоты птичьего полета в изображения вида с высоты птичьего полета, по которым элементы 24 разметки полосы движения выявляются и проецируются в систему координат транспортного средства. На фиг. 4, точки обнаружения элементов 24 разметки полосы движения обозначены Pw и указаны закрашенными кружками.
Блок 32 выявления величины перемещения выявляет счисление пути, которое является величиной перемещения за единичное время транспортного средства 21, из различных типов информации, выявленной группой 15 датчиков. Объединение счислений пути дает траектории движения транспортного средства возможность рассчитываться в системе координат счисления пути.
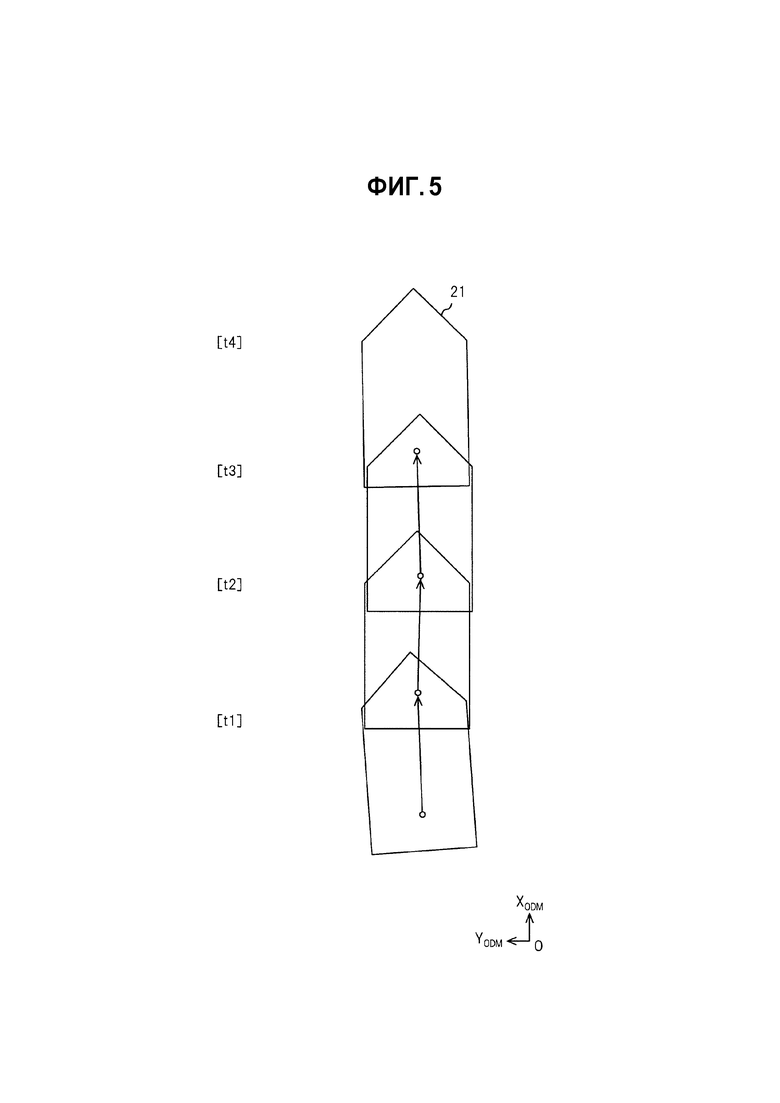
Фиг. 5 - схема, иллюстрирующая систему координат счисления пути.
Система координат счисления пути предполагает положение транспортного средства в момент времени, например, когда включается или отключается питание для системы, находящимся в начале координат, а ориентацию (азимут) кузова транспортного средства в этот момент времени имеющей значение 0 градусов. Посредством сохранения трех параметров, а именно, координат [XODM, YODM] и ориентации кузова транспортного средства [θODM], у транспортного средства в системе координат счисления пути в каждом рабочем цикле, выявляется траектория движения. На фиг. 5, проиллюстрированы координаты и ориентации кузова транспортного средства у транспортного средства в моменты с t1 по t4 времени. Отметим, что при текущем местоположении транспортного средства, установленном в начало координат, преобразование координат хранимых данных положений целевого объекта может выполняться в каждый момент времени. Другими словами, может быть достаточным, чтобы данные положений целевого объекта хранились в той же самой системе координат.
Блок 33 хранения положений целевого объекта сохраняет траекторию движения на основании величин перемещений, выявленных блоком 32 выявления величины перемещения, и положений целевого объекта, выявленных блоком 31 выявления положений целевого объекта, в связи друг с другом в системе координат счисления пути.
Фиг. 6 - схема, иллюстрирующая положения целевого объекта в системе координат транспортного средства.
На фиг. 6, проиллюстрированы положения, в системе координат транспортного средства, целевых объектов, выявленных блоком 31 выявления положений целевого объекта в моменты времени с t1 по t4. Что касается целевых объектов, выявляются точки Pc обнаружения бордюрного камня 23, присутствующего по левую сторону от транспортного средства 21, точки Pw обнаружения одного из элементов 24 разметки полосы движения, присутствующего по левую сторону от транспортного средства 21, и точки Pw обнаружения другого из элементов 24 разметки полосы движения, присутствующего по правую сторону от транспортного средства 21. Положения соответственных целевых объектов в системе координат транспортного средства изменяются от момента к моменту вследствие смещения и изменения ориентации транспортного средства 21.
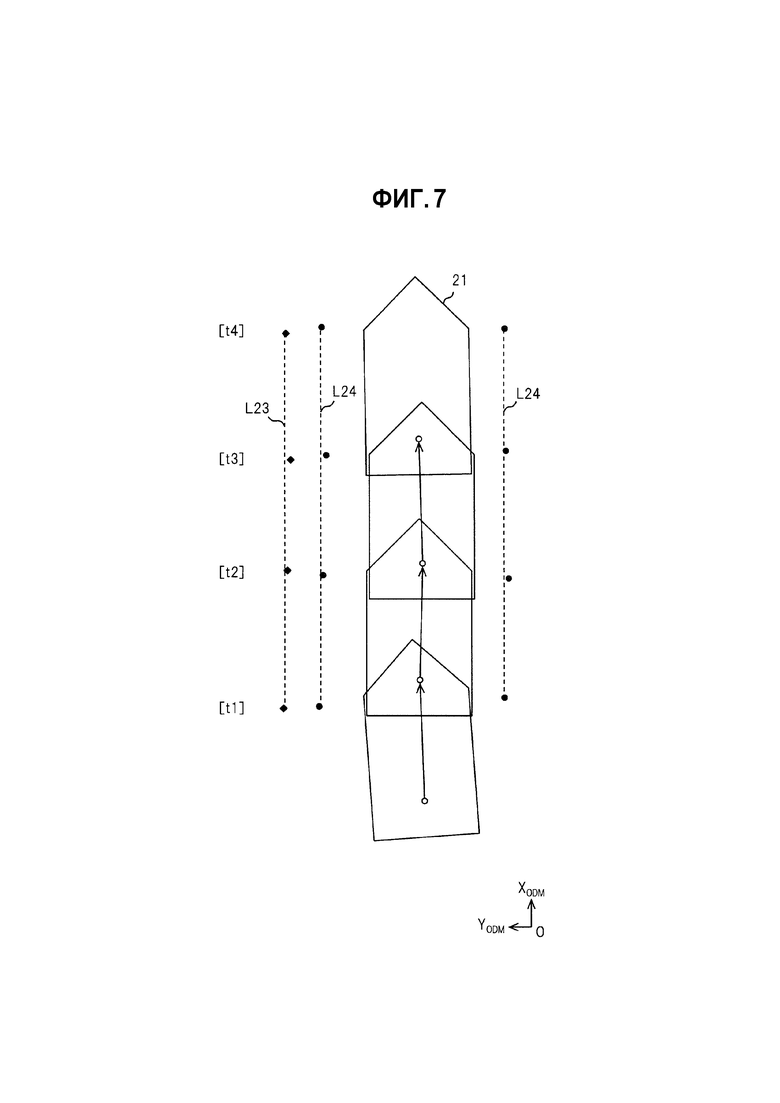
Фиг. 7 - схема, в которой траектория движения, основанная на величинах перемещений транспортного средства, связана с положениями целевых объектов.
Другими словами, соответствующие координатам транспортного средства и ориентациям кузова транспортного средства в моменты с t1 по t4 времени, положения целевых объектов в соответственные моменты времени проецируются в систему координат счисления пути. Еще другими словами, в соответственные моменты времени, проецируются точки Pc обнаружения бордюрного камня 23, присутствующего по левую сторону от транспортного средства 21, точки Pw обнаружения одного из элементов 24 разметки полосы движения, присутствующего по левую сторону от транспортного средства 21, и точки Pw обнаружения другого из элементов 24 разметки полосы движения, присутствующего по правую сторону от транспортного средства 21.
Блок 33 хранения положений целевого объекта получает прямые линии, направленные вдоль полосы движения для проезда из групп точек, собранных в течение единичного времени Δt на целевых объектах, последовательно выявленных блоком 31 выявления положений целевого объекта. Более точно, оптимальные параметры a, b и c в уравнении [aXODM+bYODM+c=0], представляющем прямую линию, рассчитываются в системе координат счисления пути.
Когда предполагается, что единичное время Δt имеет значение 0,2 секунды, радиолокационные устройства 12 работают на 25 Гц, а камеры 13 работают на 30 Гц, данные в пяти точках и данные в шести точках могут получаться в отношении бордюрного камня 23 и каждого элемента 24 разметки полосы движения, соответственно, в течение единичного времени Δt. Предполагается, что, присутствует ли каждый целевой объект по левую сторону или правую сторону от транспортного средства 21, определяется в зависимости от того, положительна или отрицательна координата YVHC целевого объекта в системе координат транспортного средства. Группа точек делится в зависимости от того, расположена ли каждая точка по правую сторону или левую сторону от транспортного средства 21 таким образом, и впоследствии рассчитываются параметры a, b и c.
Когда сумма расстояний между прямой линией и соответственными точками обнаружения становится не меньшей, чем пороговое значение, не выносится решение, что определима прямая линия. С другой стороны, когда сумма расстояний между прямой линией и соответственными точками обнаружения становится меньшей, чем пороговое значение, выносится решение, что определима прямая линия. Две точки, которые дают максимальную длину между ними, выбираются из точек обнаружения, которые дают минимальное расстояние до прямой линии, и информация о двух точках, вместе с моментами времени ее получения, сохраняется в блоке 33 хранения положений целевого объекта.
В этом случае, прямая линия L23 выделяется из точек Pc обнаружения, выявленных в моменты с t1 по t4 времени, бордюрного камня 23, присутствующего по левую сторону от транспортного средства 21. В дополнение, прямая линия L24 выделяется из точек Pw обнаружения, выявленных в моменты с t1 по t4 времени, одного из элементов 24 разметки полосы движения, присутствующего по левую сторону от транспортного средства 21. Кроме того, еще одна прямая линия L24 выделяется из точек Pw обнаружения, выявленных в моменты с t1 по t4 времени, другого из элементов 24 разметки полосы движения, присутствующего по правую сторону от транспортного средства 21.
Блок 34 точки поворота, опираясь на траекторию движения, выявляет точку, в которой, идя назад от текущего местоположения Pn, угол θt поворота транспортного средства впервые становится не меньшим, чем предопределенный заданный угол θ1, в качестве точки Pt1 поворота.
Угол θt поворота транспортного средства, в системе координат счисления пути, является величиной изменения ориентации до тех по, пока не достигнута текущая ориентация кузова транспортного средства, а потому, является угловой разницей кузова транспортного средства с текущим направлением кузова транспортного средства, используемым в качестве опорного угла. Начальным значением заданного угла θ1, например, является 60 градусов. Однако, заданный угол θ1 выполнен с возможностью быть переменным согласно длинам прямых линий, полученных блоком 33 хранения положений целевого объекта.
Другими словами, когда, идя назад от текущего местоположения, полоса движения для проезда является прямой линией и, по мере того как протяженность L прямой линии полосы движения для проезда возрастает, заданный угол θ1 делается меньшим. Протяженность L прямой линии, например, получается, опираясь на набор прямых линий, выделенных блоком 33 хранения положений целевого объекта, и определяя, насколько далеко, идя назад от текущего местоположения, прямые линии считаются принадлежащими одной и той же прямой линии. Когда протяженность L прямой линии велика, целевой объект, служащий в качестве опорной точки в направлении ширины транспортного средства, имеется в распоряжении в направлении движения, но целевой объект, служащий в качестве опорной точки в направлении движения расположен, идя назад от текущего местоположения, далеко, и накопленная ошибка счислений пути возрастает, что заставляет ухудшаться точность оценки положений транспортного средства. В таком случае, становление заданного угла θ1 меньшим по мере того, как возрастает протяженность L прямой линии, способствует выявлению еще более пологого поворота в качестве точки Pt1 поворота, а содействие выявлению точки Pt1 поворота в точке, которая, идя назад от текущего местоположения, находится ближе к текущему местоположению, дополнительно может способствовать удерживания в памяти целевого объекта, служащего в качестве опорной точки в направлении движения.
Фиг. 8 - отображение, используемое для установки заданного угла θ1 согласно протяженности L прямой линии;
Абсцисса и ордината отображения представляют собой, соответственно, протяженность L прямой линии и заданный уголθ1. Что касается протяженности L прямой линии, значение L1, которое является большим, чем 0, и значение L2, которое является большим, чем L1, определены заранее. Что касается заданного угла θ1, значение θMIN, которое является большим, чем 0, и значение θMAX, которое является большим, чем θMIN, определены заранее. Значение θMAX и значение θMIN, например, имеют значения, соответственно, 60 градусов и 30 градусов. Когда протяженность L прямой линии находится в диапазоне от L1 до L2, чем больше протяженность L прямой линии, тем меньше становится заданный угол θ1 в пределах диапазона от θMAX до θMIN. В дополнение, когда протяженность L не является меньшей, чем L2, заданный угол θ1 поддерживается на θMIN.
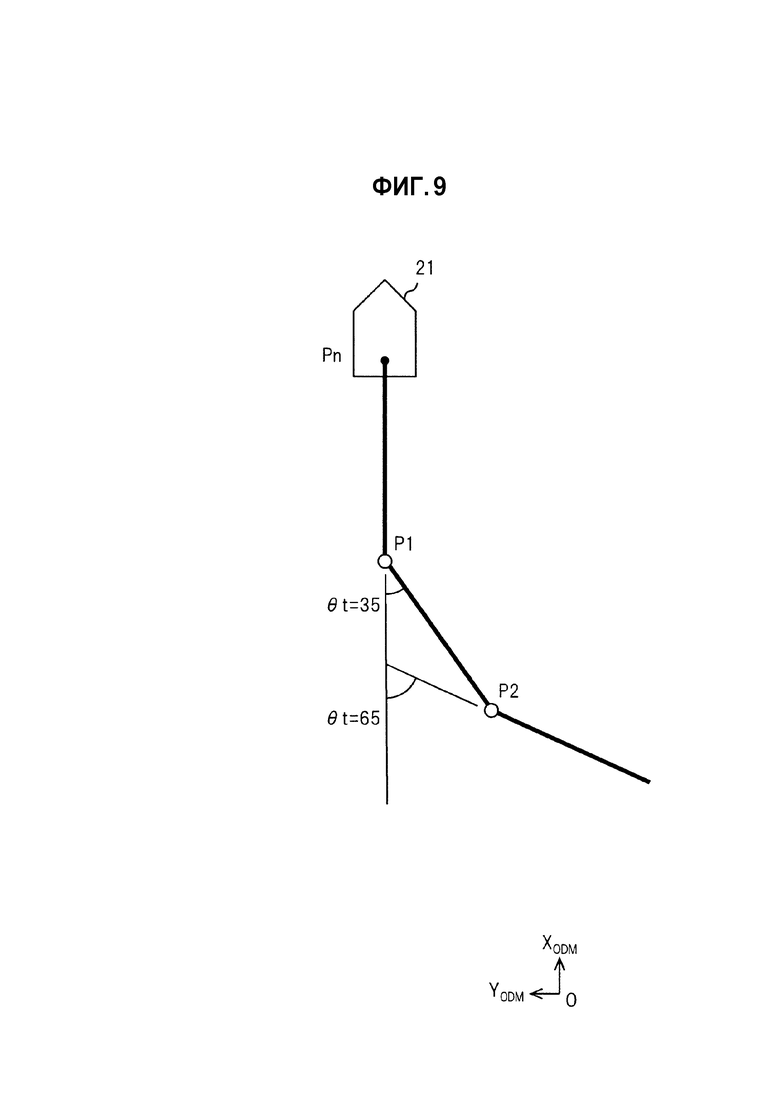
Фиг. 9 - схема, описывающая установку точки Pt1 поворота.
Предполагается, что точки P1 и P2 расположены в области, достижимой, идя назад от текущего местоположения Pn, а угол θt поворота в точке P1 и угол θt поворота в точке P2 имеют значения, соответственно, 35 градусов и 65 градусов. Поэтому, когда заданный угол θ1 имеет значение 60 градусов, точкой, в которой, идя назад от текущего местоположения Pn, угол θt поворота впервые становится не меньшим, чем заданный угол θ1, является точка P2, и точка P2 выявляется в качестве точки Pt1 поворота. В дополнение, когда заданный угол θ1 имеет значение 30 градусов, точкой, в которой, идя назад от текущего местоположения Pn, угол θt поворота впервые становится не меньшим, чем заданный угол θ1, является точка P1, и точка P1 выявляется в качестве точки Pt1 поворота. Отметим, что обе точки могут устанавливаться в качестве точек поворота таким образом, чтобы точка P1 и точка P2 устанавливались, соответственно, в качестве точки Pt1 поворота и точки Pt2 поворота. Другими словами, может быть достаточно, чтобы были выполнены с возможностью удерживаться в памяти данные положений целевого объекта в периферийной области текущего положения транспортного средства у транспортного средства и в диапазоне заданной протяженности, предшествующем точке поворота.
Есть вероятность, что точка, в которой угол θt поворота становится не меньшим, чем заданный угол θ1, выявляется вследствие виляния, такого как происходящее, при уклонении от препятствия, и, таким образом, точка поворота может быть выполнена с возможностью получаться с использованием среднего угла θtAVE. поворота
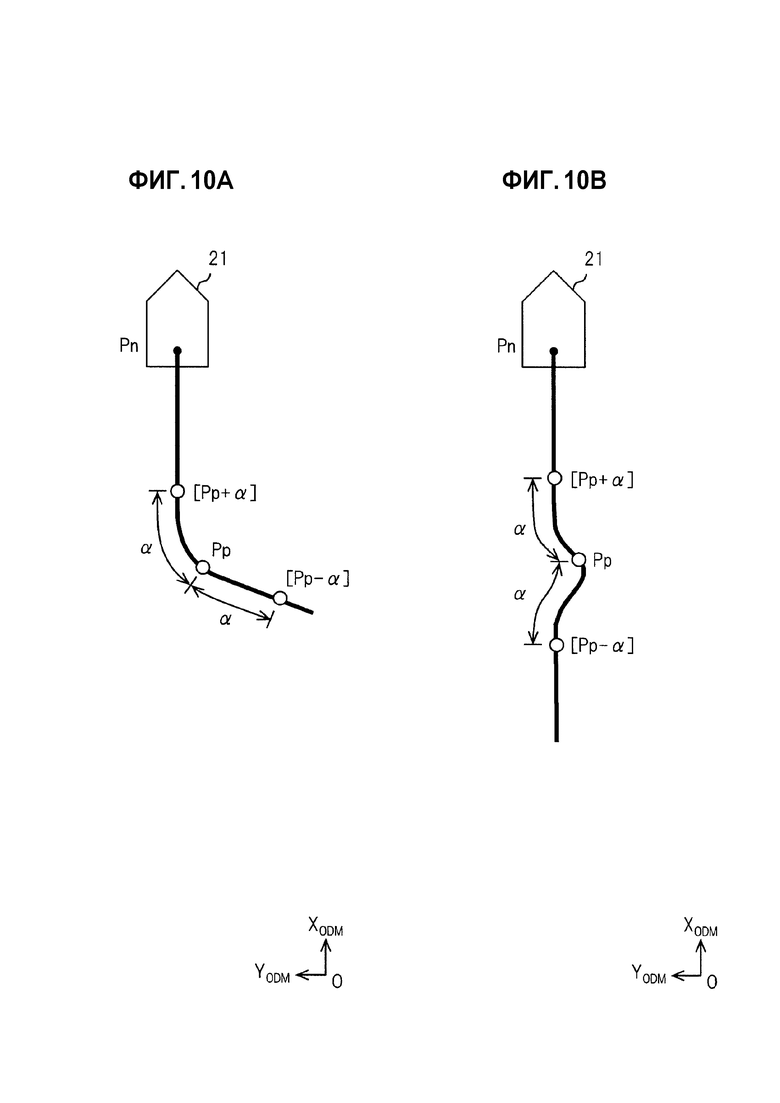
Сначала, точка, в которой угол θt поворота становится не меньшим, чем заданный угол θ1, выбирается в качестве возможного варианта Pp точки поворота, и рассчитывается средний угол θtAVE поворота на предопределенном заданном участке, центрирующемся вокруг возможного варианта Pp точки поворота. Заданный участок является участком, который имеет протяженности, каждая из которых не меньше предопределенного значения α спереди и сзади от возможного варианта Pp точки поворота, то есть, участком от точки [Pp-α] до точки [Pp+α]. Предопределенное α, например, имеет значение 10 м.
Когда средний угол θtAVE поворота не является меньшим, чем предопределенный заданный угол θ2, транспортное средство 21 определяется поворачивающим, и возможный вариант Pp точки поворота выявляется в качестве окончательной точки Pt1 поворота. Заданный угол θ2, например, имеет значение 5 градусов. С другой стороны, когда средний угол θtAVE поворота является меньшим, чем заданный угол θ2, транспортное средство 21 определяется виляющим, и возможный вариант Pp точки поворота исключается из возможных вариантов и, в связи с этим, идя дальше назад, отыскивается следующий возможный вариант Pp точки поворота.
Фиг. 10A и 10B - схемы, описывающие определение виляния.
Фиг. 10A иллюстрирует случай, где возможный вариант Pp точки выбирается вследствие поворота, выполняемого транспортным средством, а фиг. 10B иллюстрирует случай, где возможный вариант Pp точки поворота выбирается вследствие виляния, выполняемого транспортным средством, соответственно. Выполнение описанного выше определения виляния побуждает возможный вариант Pp точки поворота выявляться в качестве окончательной точки Pt1 поворота в случае по фиг. 10A и исключаться из возможных вариантов в случае по фиг. 10B, соответственно.
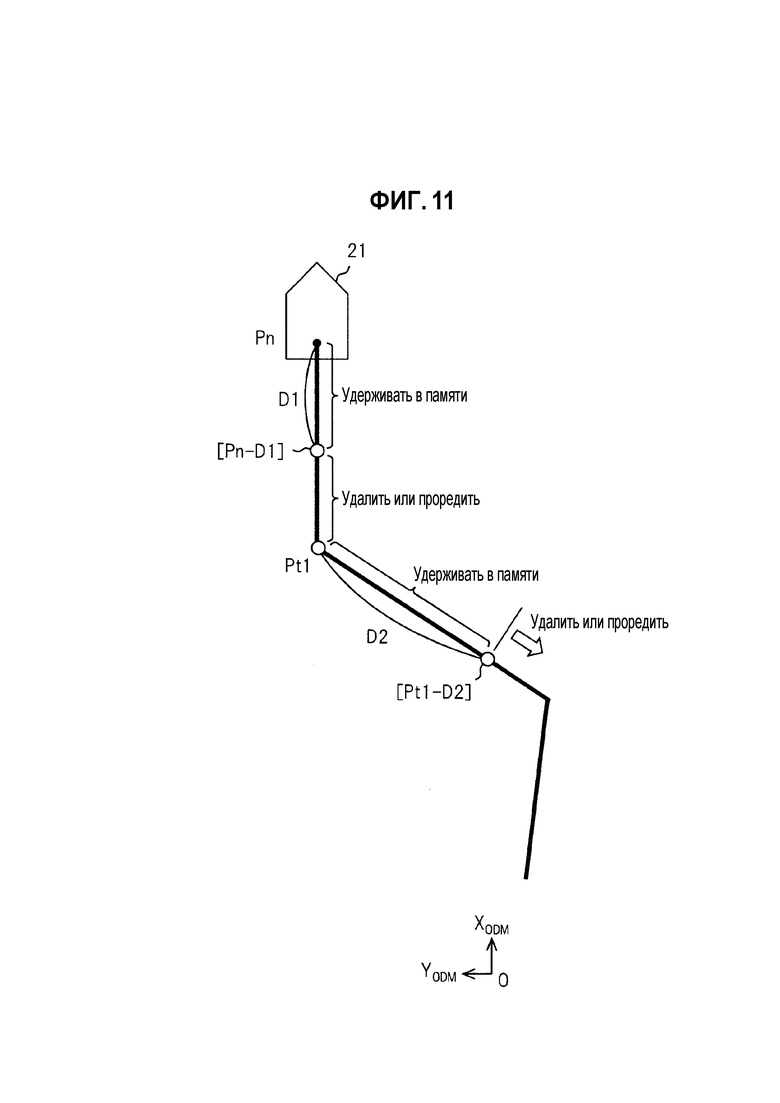
Блок 33 хранения положений целевого объекта удерживает в памяти данные положений целевого объекта в диапазоне, идущем назад от текущего местоположения Pn на предопределенное расстояние D1 до точки [Pn-D1], и в диапазоне, идущем назад от точки Pt1 поворота на предопределенное заданное расстояние D2 до точки [Pt1-D2]. С другой стороны, другие данные положений целевого объекта, то есть, данные положений целевого объекта в диапазоне от точки [Pn-D1] до точки Pt1 поворота и данные положений целевого объекта в, и предшествующие точке [Pt1-D2], удаляются или прореживаются. В зависимости от количества данных, которые могут храниться в блоке 33 хранения положений целевого объекта, не все данные обязательно должны удаляться, и может быть достаточно, чтобы количество хранимых данных, например, регулировалось конфигурированием, чтобы хранились данные положений целевого объекта, прореженные с предопределенным интервалом разнесения. Заданное расстояние D1, например, имеет значение 20 м. Начальным значением заданного расстояния D2, например, является 20 м.
Фиг. 11 - схема, иллюстрирующая участки, для которых удерживаются данные положений целевого объекта, и участки, для которых данные положений целевого объекта удаляются или прореживаются.
Что касается заданного расстояния D2, заданное расстояние D2 делается большим по мере того, как убывает количество N меток целевого объекта, относящихся к бордюрному камню 23, элементам 24 разметки полосы движения, и тому подобному, чтобы блок 31 выявления положений целевого объекта был способен выявлять в диапазоне, идущем назад от точки Pt1 поворота на заданное расстояние D2. Становление заданного расстояния D2 большим по мере того, как убывает количество N меток целевого объекта, таким образом способствует гарантированию количества N меток целевого объекта.
Фиг. 12 - отображение, используемое для установки заданного расстояния D2 согласно количеству N меток целевого объекта.
Абсцисса и ордината отображения представляют собой, соответственно, количество N меток целевого объекта и заданное расстояние D2. Что касается количества N меток целевого объекта, значение N1, которое является большим, чем 0, и значение N2, которое является большим, чем N1, определены заранее. Что касается заданного расстояния D2, значение DMIN, которое является большим, чем 0, и значение DMAX, которое является большим, чем DMIN, определены заранее. Значение DMIN и значение DMAX, например, имеют значение, соответственно, 20 м и 40 м. Хотя и является количеством точек обнаружения, количество N меток целевого объекта может быть преобразовано в совокупную длину прямых линий. Когда количество N меток целевого объекта не является меньшим, чем N2, заданное расстояние D2 поддерживается на DMIN. В дополнение, когда количество N меток целевого объекта находится в диапазоне от N2 до N1, чем меньше количество N меток целевого объекта, те большим становится заданное расстояние D2 в пределах диапазона от DMIN до DMAX.
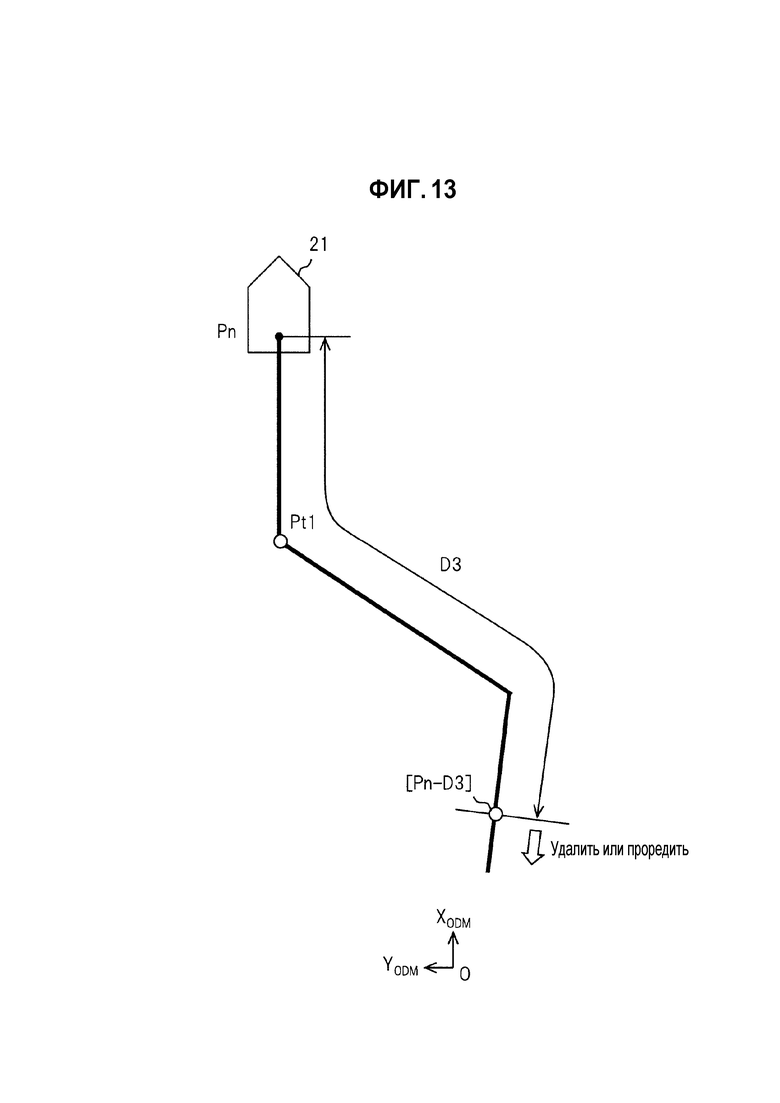
Блок 33 хранения положений целевого объекта единообразно (автоматически) и последовательно удаляет положения целевых объектов, предшествующие точке [Pn-D3], достижимой, идя назад от текущего местоположения Pn на предопределенное заданное расстояние D3.
Фиг. 13 - схема, иллюстрирующая заданное расстояние D3.
Поскольку, по мере того, как длина перемещения возрастает, накопленная ошибка траектории движения, выявленной в системе координат счисления пути, становится большей и влияет на оценку положения транспортного средства, заданное расстояние D3 устанавливается в качестве расстояния, на котором накопленная ошибка вероятно должна возрастать, и, например, устанавливается на 100 м. Таким образом, даже когда точка Pt1 поворота находится в точке, предшествующей точке [Pn-D3], данные положений целевого объекта в точках, предшествующих точке [Pn-D3], выполнены с возможностью удаляться или прореживаться.
Блок 35 оценки положения транспортного средства, посредством сопоставления данных положений целевого объекта, хранимых в блоке 33 хранения положений целевого объекта, с картографической информацией, хранимой в базе 14 данных карт, оценивает положение транспортного средства у транспортного средства 21 в системе координат карты.
Система координат карты является двухмерной системой координат, когда рассматривается на виде сверху, и предполагается, что направление с востока на запад и направление с севера на юг соответствуют оси XMAP и оси YMAP, соответственно. Ориентация (азимут) кузова транспортного средства представлена углом против часовой стрелки по отношению к 0 градусов прямо на восток. В системе координат карты, оцениваются три параметра, а именно, координаты [XMAP, YMAP] и ориентация кузова транспортного средства [θMAP] у транспортного средства. Для сопоставления (сопоставления с картой), например, используется алгоритм итерационного прохождения ближайших точек (ICP). Когда прямые линии сопоставляются друг с другом при сопоставлении, конечные точки на обоих концах прямых линий сопоставляются друг с другом в качестве точек оценки, и, когда промежуток между конечными точками на обоих концах велик, точки в промежутке могут интерполироваться.
Затем, будет описана обработка оценки положения транспортного средства, которую контроллер 16 выполняет на каждом предопределенном интервале (например, 10 мс).
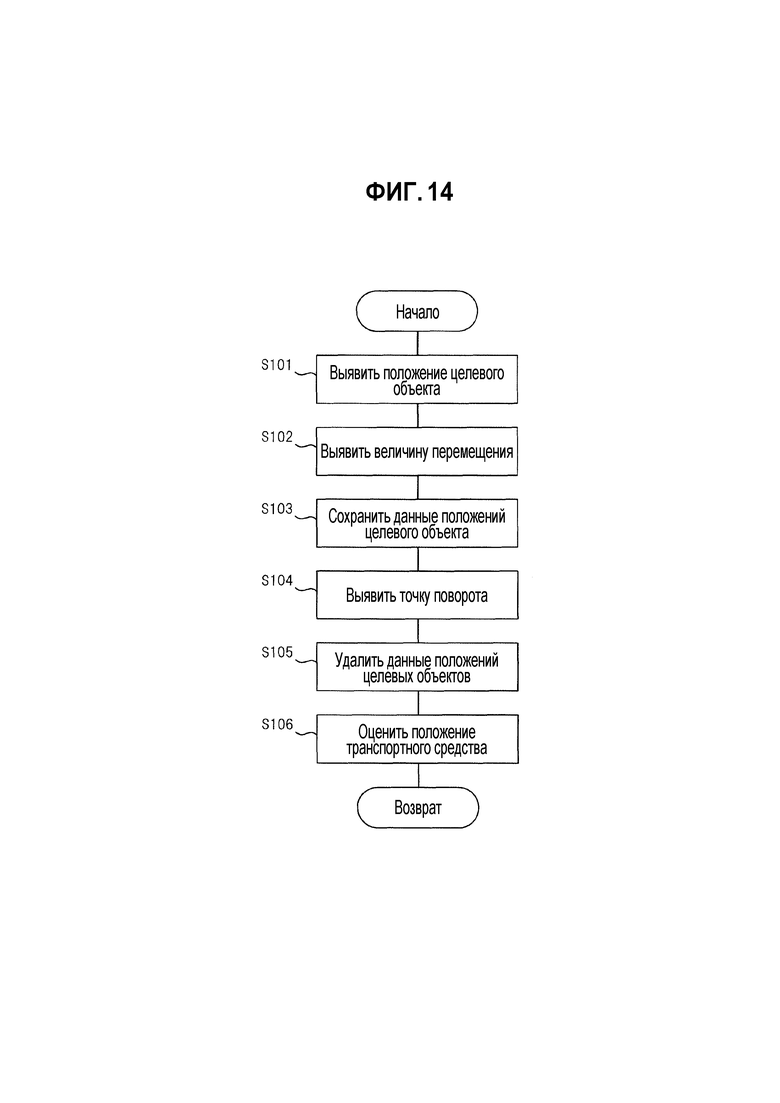
Фиг. 14 - блок-схема последовательности операций способа, иллюстрирующая обработку оценки положения транспортного средства.
Прежде всего, этап S101 соответствует обработке, выполняемой блоком 31 выявления положений целевого объекта, при которой выявляются положения целевых объектов, присутствующих на периферии транспортного средства, таких как бордюрный камень 23 и элементы 24 разметки полосы движения, в качестве относительных положений по отношению к транспортному средству в системе координат транспортного средства, неподвижной относительно транспортного средства. Другими словами, точки Pc обнаружения бордюрного камня 23, выявленные радиолокационными устройствами 12, и точки Pw обнаружения элементов 24 разметки полосы движения, выявленные камерами 13, выявляются в системе координат транспортного средства.
Следующий этап S102 соответствует обработке, выполняемой блоком 32 выявления величины перемещения, при которой счисления пути, каждое из которых является величиной перемещения за единичное время транспортного средства 21, выявляются из различных типов информации, выявленной группой 15 датчиков. Интегрирование счислений пути дает траектории движения транспортного средства возможность рассчитываться в системе координат счисления пути. Другими словами, три параметра, а именно, координаты [XODM, YODM] и ориентация кузова транспортного средства [θODM], у транспортного средства сохраняются в системе координат счисления пути в каждом рабочем цикле.
Следующий этап S103 соответствует обработке, выполняемой блоком 33 хранения положений целевого объекта, при которой траектория движения, основанная на величинах перемещений, выявленных блоком 32 выявления величины перемещения, и положения целевых объектов, выявленные блоком 31 выявления положений целевого объекта, сохраняются в связи друг с другом в системе координат счисления пути. Другими словами, данные положений целевого объекта, выявленные в соответственные моменты времени, перемещаются на величины перемещений транспортного средства в течение истекших продолжительностей от соответственных моментов времени до текущего момента времени, и соответствующие координатам и ориентациям кузова транспортного средства у транспортного средства в соответственные моменты времени, соответственные данные положений целевого объекта бордюрного камня 23, элементов 24 разметки полосы движения, и тому подобного, проецируются в систему координат счисления пути и сохраняются. Однако, данные положений целевого объекта в точках, предшествующих точке [Pn-D3], достигаемой, идя назад от текущего местоположения Pn на предопределенное заданное расстояние D3, единообразно и последовательно удаляются.
Следующий этап S104 соответствует обработке, выполняемой блоком 34 выявления точки поворота, в которой, опираясь на траекторию движения, точка, в которой, идя назад от текущего местоположения Pn, угол θt поворота транспортного средства впервые становится не меньшим, чем заданный угол θ1, выявляется в качестве точки Pt1 поворота. В вышеприведенной обработке, когда, идя назад от текущего местоположения Pn, полоса движения для проезда является прямой линией и, по мере того как протяженность L прямой линии полосы движения для проезда возрастает, заданный угол θ1 делается меньшим.
В дополнение, после того, как выполнено определение виляния, определяется окончательная точка Pt1 поворота. Другими словами, точка, в которой угол θt поворота становится не меньшим, чем заданный угол θ1, выбирается в качестве возможного варианта Pp точки поворота, и рассчитывается средний угол θtAVE поворота на заданном участке, центрирующемся вокруг точки Pp поворота, от точки [Pp+α] до точки [Pp-α]. Когда средний угол θtAVE поворота не является меньшим, чем заданный угол θ2, транспортное средство 21 определяется поворачивающим, и возможный вариант Pp точки поворота выявляется в качестве окончательной точки Pt1 поворота. С другой стороны, средний угол θtAVE поворота является меньшим, чем заданный угол θ2, транспортное средство 21 определяется виляющим, и возможный вариант Pp точки поворота исключается из возможных вариантов и, в связи с этим, идя дальше назад, отыскивается следующий возможный вариант Pp точки поворота.
Следующий этап S105 соответствует обработке, выполняемой блоком 33 хранения положений целевого объекта, при которой данные положений целевого объекта в диапазоне, идущем назад от текущего местоположения Pn до предопределенного расстояния D1, и в диапазоне, идущем назад от точки Pt1 поворота на заданное расстояние D2 до точки [Pt1-D2], удерживаются в памяти, а другие данные положений целевого объекта удаляются или прореживаются. При вышеприведенной обработке, что касается заданного расстояния D2, заданное расстояние D2 делается большим по мере того, как количество N меток целевого объекта, относящихся к бордюрному камню 23, элементам 24 разметки полосы движения, и тому подобному, убывает, чтобы блок 31 выявления положений целевого объекта был способен выявлять в диапазоне, идущем назад от точки Pt1 поворота на заданное расстояние D2.
Следующий этап S106 соответствует обработке, выполняемой блоком 35 оценки положения транспортного средства, при которой, посредством сопоставления данных положений целевого объекта, хранимых в блоке 33 хранения положений целевого объекта, с картографической информацией, хранимой в базе 14 данных карт, оценивается положение транспортного средства у транспортного средства 21 в системе координат карты. Другими словами, в системе координат карты, оцениваются три параметра, а именно, координаты [XMAP, YMAP] и ориентация кузова транспортного средства [θMAP] у транспортного средства.
Вышеприведенное является описанием обработки оценки положения транспортного средства.
<Работа>
Прежде всего, будет описана технологическая концепция первого варианта осуществления.
Посредством сопоставления положений целевых объектов, таких как бордюрный камень 23, выявленный радиолокационными устройствами 12, и элементы 24 разметки полосы движения, выявленные камерами 13, с положениями соответственных целевых объектов, закодированными заранее в данных в виде картографической информации, оценивается положение транспортного средства у транспортного средства 21. Настоящий вариант осуществления приводит пример способа, в котором картографическая информация создается только с использованием целевых объектов, таких как бордюрный камень 23 и элементы 24 разметки полосы движения, выявление которых является сравнительно более легким, чем других целевых объектов, и которые могут быть описаны в виде двухмерных данных, когда рассматриваются на виде сверху, и, с использованием картографической информации, выполняется оценка положения транспортного средства. Отметим, что, когда должна быть достигнута более высокая точность оценки положений транспортного средства, может использоваться картографическая информация, имеющая трехмерные данные (длину, ширину и высоту) конструкций. Настоящий вариант осуществления также может быть применен к этому случаю.
Поскольку, когда на прямолинейном участке целевого объекта, такого как бордюрный камень 23 и элементы 24 разметки полосы движения, выявляются произвольные точки на целевом объекте, данные положений целевого объекта, продолжающиеся на прямой линии в направлении движения, служат в качестве опорной точки в направлении ширины транспортного средства, но не служат в качестве опорной точки в направлении движения, данные положений целевого объекта не могут точно сопоставляться с картографической информацией в направлении движения. Другими словами, когда данные положений целевого объекта, характеризуемые прямой линией, продолжающейся по прямой линии, имеются в распоряжении, данные положений целевого объекта, служащие в качестве опорной точки в направлении движения, становятся бесполезными, что делает невозможным точное получение положения транспортного средства. Поэтому, для того чтобы получать положение транспортного средства однозначно, требуется по меньшей мере комбинация двух прямых линий, пересекающихся друг с другом.
Поскольку только имеющие форму прямой линии целевые объекты могут выявляться на прямой дороге, данные положений целевого объекта, делающие возможным, чтобы положение транспортного средства получалось однозначно, не могут быть получены посредством выполнения считывания только из текущего местоположения. Таким образом, хранение некоторого количества прошлых данных положений целевого объекта в системе координат счисления пути посредством использования информации о величине перемещения транспортного средства 21 и сопоставление системы координат счисления пути, в которую проецируются данные положений целевого объекта, с системой координат карты, в которой положения целевых объектов сохранены заранее, дают возможность оцениваться положению транспортного средства. Однако, в системе координат счисления пути, есть проблема по той причине, что, чем больше длина перемещения, тем больше становится накопленная ошибка. В дополнение, поскольку беспредельное хранение выявленных положений целевого объекта и траекторий движения, основанных на величинах перемещений транспортного средства, непрактично, требуется, чтобы старые данные положений целевого объекта последовательно удалялись в хронологическом порядке. Однако, простая конфигурация, например, такая как удерживающая в памяти данные положений целевого объекта только в предопределенном диапазоне от текущего местоположения, побуждает данные положений целевого объекта на прямой линии сохраняться удерживаемыми в памяти только для прямой дороги, продолжающейся по прямой линии.
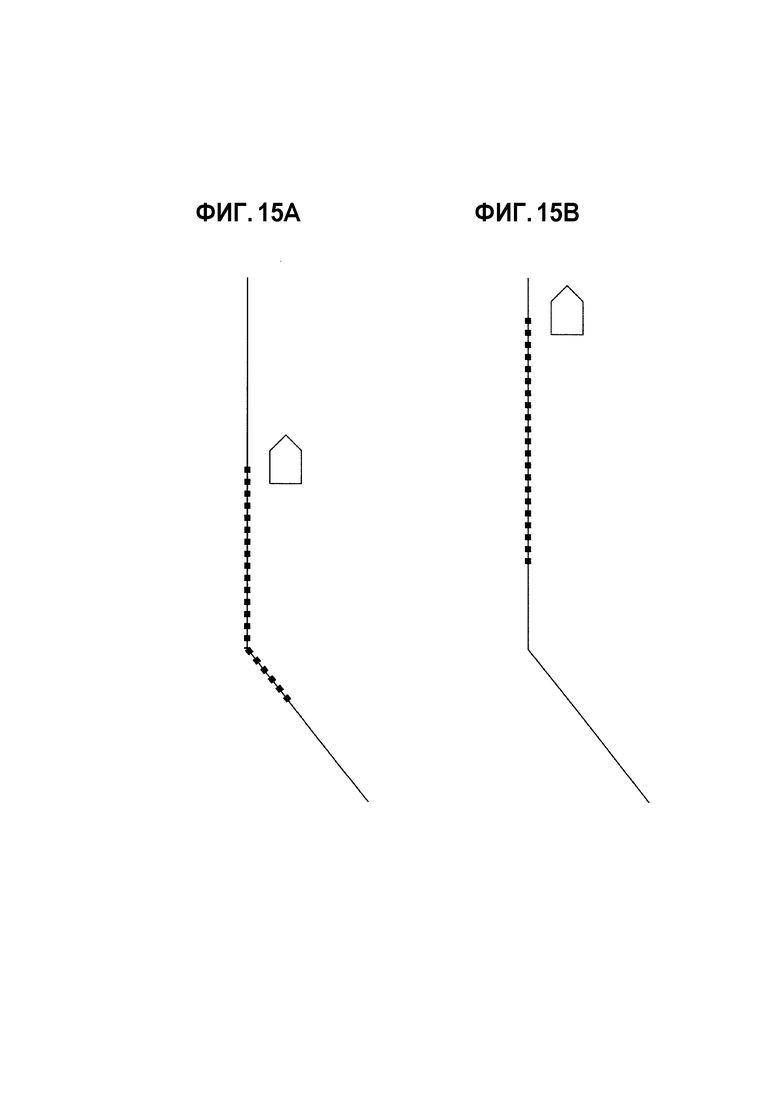
Фиг. 15A и 15B - схемы, иллюстрирующие удерживание в памяти данных положений целевого объекта только в пределах предопределенного диапазона.
На фиг. 15A и 15B, проиллюстрирован случай, где удерживаются в памяти данные положений целевого объекта только целевых объектов, присутствующих на предопределенной дальности от текущего положения, и участки, где удерживаются в памяти данные положений целевого объекта, указаны толстыми точечными линиями. Фиг. 15A иллюстрирует ситуацию в момент времени вскоре после того, как транспортное средство прошло кривую, в которой также удерживаются в памяти данные положений целевого объекта до попадания транспортного средства на кривую. Другими словами, поскольку комбинация двух прямых линий, пересекающихся друг с другом, успешно выявлена, положение транспортного средства может получаться однозначно. С другой стороны, на фиг. 15B, транспортное средство, продолжившее движение дальше вперед, побудило, чтобы были удалены данные положений целевого объекта до попадания транспортного средства на кривую. Другими словами, поскольку не выявлены две прямых линии, пересекающих друг друга, а выявлена только одна прямая линия, невозможно получить положение транспортного средства однозначно.
Поэтому, требуется выявить точку, в которой транспортное средство отклонилось от траектории движения, и сохранять данные положений целевого объекта в точках, предшествующих точке.
Фиг. 16A и 16B - схемы, иллюстрирующие концепцию варианта осуществления.
На фиг. 16A и 16B, участки, где удерживаются в памяти данные положений целевого объекта, указаны толстыми точечными линиями. Фиг. 16A иллюстрирует ситуацию в момент времени вскоре после того, как транспортное средство прошло кривую, в которой также удерживаются в памяти данные положений целевого объекта до попадания транспортного средства на кривую. Другими словами, поскольку комбинация двух прямых линий, пересекающихся друг с другом, успешно выявлена, положение транспортного средства может получаться однозначно. В дополнение, на части фиг. 16B, хотя транспортное средство продолжило движение дальше вперед, данные положений целевого объекта в диапазоне, идущем назад от текущего местоположения транспортного средства на предопределенное расстояние, и данные положений целевого объекта до попадания транспортного средства на кривую удерживаются в памяти. Другими словами, поскольку комбинация двух прямых линий, пересекающихся друг с другом, успешно выявлена, можно получать положение транспортного средства однозначно.
Затем, будет описана работа первого варианта осуществления.
Сначала положения целевых объектов, присутствующих на периферии транспортного средства, таких как бордюрный камень 23 и элементы 24 разметки полосы движения, выявляются в качестве относительных положений по отношению к транспортному средству в системе координат транспортного средства, неподвижной относительно транспортного средства (этап S101), и счисления пути, каждое из которых является величиной перемещения за единичное время транспортного средства 21, определяются из различных типов информации, выявленной группой 15 датчиков, и, посредством интегрирования счислений пути, траектория движения транспортного средства рассчитывается в системе координат счисления пути (этап S102). В дополнение, выявленная траектория движения, основанная на величинах перемещений, и выявленные положения целевых объектов, сохраняются в связи друг с другом в системе координат счисления пути (этап S103).
На основании траектории движения, точка, в которой угол θt поворота транспортного средства становится не меньшим, чем предопределенный заданный угол θ1, выявляется в качестве точки Pt1 поворота (этап S104). Данные положений целевого объекта в диапазоне, идущем назад от текущего местоположения Pn до предопределенного расстояния D1, и в диапазоне, идущем назад от точки Pt1 поворота на заданное расстояние D2 до точки [Pt1-D2], удерживаются в памяти, а другие данные положений целевого объекта удаляются или прореживаются (этап S105). Посредством сопоставления данных положений целевого объекта, хранимых в блоке 33 хранения положений целевого объекта, с картографической информацией, хранимой в базе 14 данных карт, оценивается положение транспортного средства у транспортного средства 21 в системе координат карты (этап S106).
Поскольку, как описано выше, удерживаются в памяти данные положений целевого объекта в диапазоне, идущем назад от текущего местоположения Pn на заданное расстояние D1, и в диапазоне, идущем назад от точки Pt1 поворота на заданное расстояние D2 до точки [Pt1-D2], посредством сопоставления данных положений целевого объекта с картографической информацией, что касается точки Pt1 поворота в качестве опорной точки, положение транспортного средства может однозначно оцениваться. В дополнение, поскольку данные положений целевого объекта в других точках, в том числе, точках в диапазоне [D1-Pt1] и точках, предшествующих точке [Pt1-D2], удаляются или прореживаются, увеличение количества данных у данных положений целевого объекта может подавляться и регулироваться надлежащим образом. Кроме того, в системе координат счисления пути, может сдерживаться увеличение накопленной ошибки счислений пути и ее влияние на точность оценки положений транспортного средства.
Есть вероятность, что, когда полоса движения для проезда является прямой линией, и по мере того, как ее протяженность L прямой линии возрастает, возрастает накопленная ошибка счислений пути. Таким образом, когда, идя назад от текущего местоположения Pn, полоса движения для проезда является прямой линией и, по мере того как ее протяженность L прямой линии возрастает, заданный угол θ1 делается меньшим. Другими словами, становление заданного угла θ1 меньшим по мере того, как возрастает протяженность L прямой линии, содействует выявлению точки Pt1 поворота в точке, которая, идя назад от текущего местоположения, находится ближе к текущему местоположению, что может дополнительно способствовать удерживанию в памяти целевого объекта, служащего в качестве опорной точки в направлении движения. Выявление точки Pt1 поворота в более близкой точке на траектории движения дает возможность уменьшаться количеству данных у данных положений целевого объекта, которые должны храниться. В дополнение, накопленная ошибка в системе координат счисления пути может уменьшаться, и может сдерживаться снижение точности оценки положений транспортного средства.
Для улучшения точности оценки положений транспортного средства, предпочтительно, чтобы достаточное количество N меток целевого объекта имелось в распоряжении даже в диапазоне, идущем назад от точки Pt1 поворота на заданное расстояние D2. Таким образом, заданное расстояние D2 делается большим по мере того, как количество N меток целевого объекта, относящихся к бордюрному камню 23, элементам 24 разметки полосы движения, и тому подобному, убывает, чтобы блок 31 выявления положений целевого объекта был способен выявлять в диапазоне, идущем назад от точки Pt1 поворота на заданное расстояние D2. Поскольку, как описано выше, удлинение заданного расстояния D2 согласно количеству N меток целевого объекта дает возможность, чтобы обеспечивалось необходимое и достаточное количество N меток целевого объекта, тем временем, предотвращая увеличение количества данных у данных положений целевого объекта больше, чем необходимо, может обеспечиваться точность оценки положений транспортного средства.
При выявлении точки Pt1 поворота, есть вероятность, что, даже когда является точкой, в которой угол θt поворота становится не меньшим, чем заданный угол θ1, точка выявляется вследствие виляющего движения. Ложное выявление точки в качестве точки Pt1 поворота вследствие виляющего движения склонно влиять на точность оценки положений транспортного средства. Таким образом, после того, как было выполнено определение виляния, определяется окончательная точка Pt1 поворота. Более точно, точка, в которой угол θt поворота становится не меньшим, чем заданный угол θ1, выбирается в качестве возможного варианта Pp точки поворота, и рассчитывается средний угол θtAVE поворота на заданном участке, центрирующемся вокруг точки Pp поворота, то есть, участке от точки [Pp+α] до точки [Pp-α].
Когда средний угол θtAVE поворота не является меньшим, чем заданный угол θ2, транспортное средство 21 определяется поворачивающим, и возможный вариант Pp точки поворота выявляется в качестве окончательной точки Pt1 поворота. С другой стороны, когда средний угол θtAVE поворота является меньшим, чем заданный угол θ2, транспортное средство 21 определяется виляющим, и возможный вариант Pp точки поворота исключается из возможных вариантов и, в связи с этим, идя дальше назад, отыскивается следующий возможный вариант Pp точки поворота. Вышеприведенная конфигурация дает ложным определениям вследствие виляющего движения возможность уменьшаться, а точке Pt1 поворота возможность легко и точно определяться. Поэтому, может сдерживаться влияние на точность оценки положений транспортного средства.
Угол θt поворота выявляется на основании изменений направления движения транспортного средства. Более точно, выявляется угловая разность кузова транспортного средства, когда текущее направление кузова транспортного средства используется в качестве опорного угла. Вышеприведенная конфигурация дает возможность уменьшаться влиянию от накопленной ошибки в системе координат счисления пути и влиянию от изменений ориентации, как в случае уклонения от препятствия, и точно выявляться углу θt поворота.
В дополнение, на стадии, когда траектория и положения целевых объектов сохраняются в связи друг с другом (этап S103), данные положений целевого объекта в точках, предшествующих точке [Pn-D3], достигаемой, идя назад от текущего местоположения Pn на предопределенное заданное расстояние D3, последовательно удаляются. Вышеприведенная конфигурация дает возможность, чтобы сдерживалось увеличение количества данных у данных положений целевого объекта.
<Пример 1 применения>
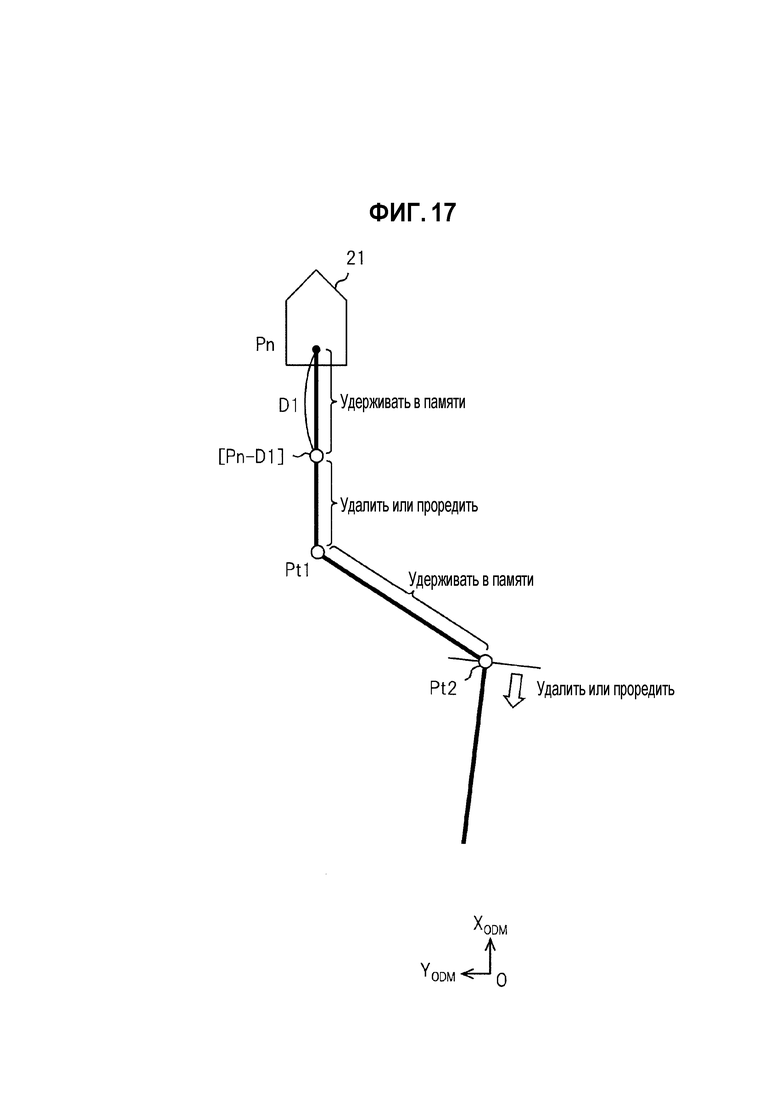
Хотя, в первом варианте осуществления, данные положений целевого объекта в точках, предшествующих точке [Pt1-D2], удаляются или прореживаются, настоящее изобретение не ограничено этой конфигурацией. Например, в диапазоне, идущем назад от точки Pt1 поворота на заданное расстояние D2, точка, в которой угол θt поворота транспортного средства становится не меньшим, чем заданный угол θ1, выявляется в качестве точки Pt2 поворота. На этой основе, удерживаются в памяти данные положений целевого объекта в диапазоне от текущего местоположения Pn до заданного расстояния D1 и в диапазоне от точки Pt1 поворота до точки Pt2 поворота. С другой стороны, данные положений целевого объекта в других точках, в том числе, точках в диапазоне [D1-Pt1] и точках, предшествующих точке Pt2 поворота, удаляются или прореживаются. Отметим, что может быть достаточно, чтобы была включена в состав по меньшей мере одна опорная точка, требуемая при сопоставлении данных положений целевого объекта с картографической информацией. Поскольку включение точки Pt1 поворота в данные положений целевого объекта, удерживаемые в памяти в качестве данных положений целевого объекта, удовлетворяет требованию, точка Pt2 поворота может быть удалена или прорежена.
Фиг. 17 - схема, иллюстрирующая, на основании точки Pt2 поворота, участки, для которых удерживаются в памяти данные положений целевого объекта, и участки, для которых данные положений целевого объекта удаляются или прореживаются.
<Пример 2 применения>
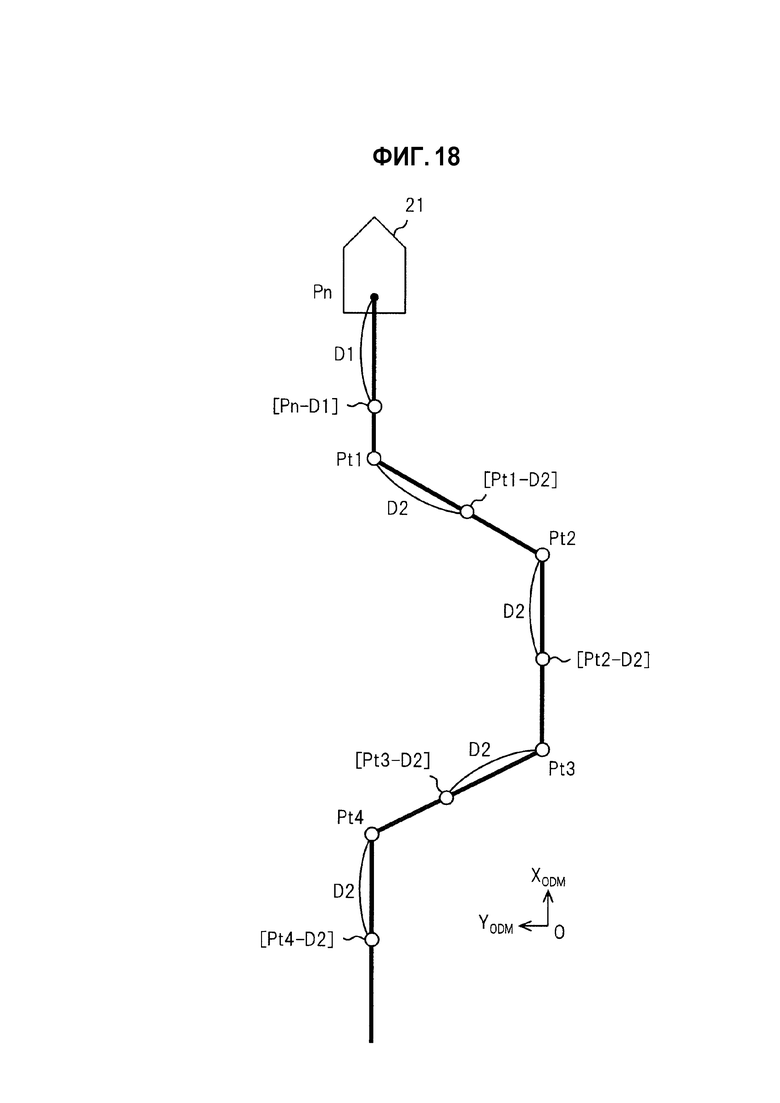
Хотя, в первом варианте осуществления, выявляется только одна точка Pt1 поворота, настоящее изобретение не ограничено этой конфигурацией, и могут быть выполнены с возможностью выявляться множество точек поворота. Например, предполагается, что все точки, в которых угол θt поворота транспортного средства становится не меньшим, чем заданный угол θ1, выявляются в диапазоне, идущем назад от текущего местоположения Pn на заданное расстояние D3 до точки [Pn-D3], и выявленные точки обозначаются точками Pt1, Pt2, Pt3, и так далее, поворота в порядке возрастания близости к текущему местоположению Pn. На этой основе, могут удерживаться в памяти данные положений целевого объекта в диапазонах, идущих назад от соответственных точек поворота на заданное расстояние D2. Поскольку, как описано выше, выявление множества точек поворота и хранение данных положений целевого объекта в диапазонах, идущих назад от соответственных точек поворота на заданное расстояние D2 дают возможность данным положений целевого объекта и картографической информации сопоставляться друг с другом, что касается соответственных точек поворота, используемых в качестве опорных точек, точность оценки положений транспортного средства может быть улучшена.
Фиг. 18 - схема, иллюстрирующая состояние, в котором выявлено множество точек поворота.
В этом примере, выявляются точки Pt1, Pt2, Pt3 и Pt4 поворота. В этом случае, удерживаются в памяти все данные положений целевого объекта в диапазоне, идущем назад от текущего местоположения Pn на заданное расстояние D1 до точки [Pn-D1], диапазоне, идущем назад от точки Pt1 поворота на заданное расстояние D2 до точки [Pt1-D2], диапазоне, идущем назад от точки Pt2 поворота на заданное расстояние D2 до точки [Pt2-D2], диапазоне, идущем назад от точки Pt3 поворота на заданное расстояние D2 до точки [Pt3-D2], и диапазоне, идущем назад от точки Pt4 поворота на заданное расстояние D2 до точки [Pt4-D2]. С другой стороны, другие данные положений целевого объекта, то есть, данные положений целевого объекта в диапазоне от точки [Pn-D1] до точки Pt1 поворота, диапазоне от точки [Pt1-D2] до точки Pt2 поворота, диапазоне от точки [Pt2-D2] до точки Pt3 поворота, диапазоне от точки [Pt3-D2] до точки Pt4 поворота, а также в и предшествующие точке [Pt4-D2], удаляются или прореживаются.
Когда, как описано выше, выявляется множество точек поворота, заданный угол θ1 может быть выполнен с возможностью быть переменным согласно количеству данных у данных положений целевого объекта, которые блок 31 выявления положений целевого объекта выявлял в диапазоне, идущем назад от текущего местоположения Pn на заданное расстояние D1. Например, заданный угол θ1 делается меньшим по мере того, как количество N меток целевого объекта, относящихся к бордюрному камню 23, элементам 24 разметки полосы движения, и тому подобному, убывает, чтобы блок 31 выявления положений целевого объекта был способен выявлять в диапазоне, идущем назад от текущего местоположения Pn на расстояние D1. Как описано выше, становление заданного угла θ1 меньшим по мере того, как убывает количество N меток целевого объекта, способствует выявлению еще более плавного поворота в качестве точки Pt1 поворота и дает возможность, чтобы точка Pt1 поворота устанавливалась в дополнительных точках, количество местоположений, в которых удерживаются в памяти данные положений целевого объекта, увеличивалось, и гарантировалось количество меток целевого объекта, требуемых для оценки положения транспортного средства. Поскольку выявление дополнительных точек поворота, наряду с предоставлением возможности удерживаться в памяти данным положений целевого объекта, требуемым для оценки положения транспортного средства, дает возможность исключаться количеству данных, требуемых для хранения других данных положений целевого объекта, накопленная ошибка в системе координат счисления пути может быть уменьшена, и может сдерживаться снижение точности оценки положений транспортного средства.
Фиг. 19 - отображение, используемое для установки заданного угла θ1 согласно количеству N меток целевого объекта.
Абсцисса и ордината отображения представляют собой количество N меток целевого объекта и заданный угол θ1, соответственно. Что касается количества N меток целевого объекта, значение N3, которое является большим, чем 0, и значение N4, которое является большим, чем N3, определены заранее. Что касается заданного угла θ1, значение θMIN, которое является большим, чем 0, и значение θMAX, которое является большим, чем θMIN, определены заранее. Значением θMAX и значением θMIN, например, являются, соответственно, 60 градусов и 30 градусов. Хотя и является величиной, указывающей количество точек обнаружения, количество N меток целевого объекта может быть преобразовано в совокупную длину прямых линий. Когда количество N меток целевого объекта не является меньшим, чем N4, заданный угол θ1 поддерживается на θMAX. Когда количество N меток целевого объекта находится в диапазоне от N4 до N3, чем меньше количество N меток целевого объекта, тем меньше становится заданный угол θ1 в пределах диапазона от θMAX до θMIN.
<Зависимости и соответствия>
В первом варианте осуществления, блок 31 выявления положений целевого объекта и обработка на этапе S101 соответствуют «блоку выявления положений целевого объекта». Блок 32 выявления величины перемещения и обработка на этапе S102 соответствуют «блоку выявления величины перемещения». Блок 33 хранения положений целевого объекта и обработка на этапах S103 и S105 соответствуют «блоку хранения положений целевого объекта». База 14 данных карт соответствует «блоку получения картографической информации». Блок 34 выявления точки поворота и обработка на этапе S104 соответствуют «блоку выявления точки поворота». Блок 35 оценки положения транспортного средства и обработка на этапе S106 соответствуют «блоку оценки положения транспортного средства». Заданное расстояние D1 соответствует «первому заданному расстоянию». Заданный угол θ1 соответствует «первому заданному углу». Заданное расстояние D2 соответствует «второму заданному расстоянию». Заданный угол θ2 соответствует «второму заданному углу». Заданное расстояние D3 соответствует «третьему заданному расстоянию».
<Полезные результаты>
Затем, будут описаны полезные результаты, достигнутые основной частью в первом варианте осуществления.
(1) Устройство оценки положения транспортного средства согласно первому варианту осуществления выявляет положения целевых объектов, присутствующих на периферии транспортного средства, выявляет величины перемещений транспортного средства и сохраняет положения целевых объектов в качестве данных положений целевого объекта, на основании выявленных величин перемещений. Устройство оценки положения транспортного средства заранее сохраняет картографическую информацию, в том числе положения целевых объектов, в базе 14 данных карт и, посредством сопоставления данных положений целевого объекта с картографической информацией, оценивает положение транспортного средства у транспортного средства. Устройство оценки положения транспортного средства выявляет точку поворота транспортного средства по величинам перемещений транспортного средства. Устройство оценки положения транспортного средства удерживает в памяти данные положений целевого объекта в диапазоне, идущем назад от текущего местоположения Pn на заданное расстояние D1, и в диапазоне, идущем назад от точки Pt1 поворота на заданное расстояние D2 до точки [Pt1-D2].
Поскольку, как описано выше, удерживаются в памяти данные положений целевого объекта в диапазоне, идущем назад от текущего местоположения Pn на заданное расстояние D1, и в диапазоне, идущем назад от точки Pt1 поворота на заданное расстояние D2 до точки [Pt1-D2], посредством сопоставления данных положений целевого объекта с картографической информацией, что касается точки Pt1 поворота в качестве опорной точки, положение транспортного средства может однозначно оцениваться. В дополнение, поскольку данные положений целевого объекта в других точках, в том числе, точках в диапазоне [D1-Pt1] и точках, предшествующих точке [Pt1-D2], удаляются или прореживаются, увеличение количества данных у данных положений целевого объекта может сдерживаться и регулироваться надлежащим образом.
(2) Устройство оценки положения транспортного средства согласно первому варианту осуществления выявляет точку, в которой угол θt поворота становится не меньшим, чем заданный угол θ1, в качестве точки Pt поворота и, в диапазоне, идущем назад от текущего местоположения Pn на заданное расстояние D1, делает заданный угол θ1 меньшим по мере того, как убывает количество N меток целевого объекта, которые выявил блок 31 выявления положений целевого объекта.
Как описано выше, становление заданного угла θ1 меньшим по мере того, как убывает количество N меток целевого объекта, дает возможность, чтобы точка Pt1 поворота устанавливалась в дополнительных точках, количество местоположений, в которых удерживаются в памяти данные положений целевого объекта, увеличивалось, и возрастало количество меток целевого объекта, которые должны удерживаться в памяти. Несмотря на то, что количество данных положений целевого объекта, которые делают возможным, чтобы гарантировалась точность оценки положений транспортного средства, увеличивается, может быть исключено количество данных, требуемых для хранения других данных положений целевого объекта.
(3) Устройство оценки положения транспортного средства согласно первому варианту осуществления выявляет точку, в которой угол θt поворота становится не меньшим, чем заданный угол θ1, в качестве точки Pt поворота, и, когда, идя назад от текущего местоположения Pn, полоса движения для проезда является прямой линией, и по мере того, как ее протяженность L прямой линии возрастает, делает заданный угол θ1 меньшим.
Поскольку, как описано выше, становление заданного угла θ1 меньшим по мере того, как возрастает протяженность L прямой линии, содействует выявлению точки Pt1 поворота в точке, которая, идя назад от текущего местоположения Pn, находится ближе к текущему местоположению Pn, что может дополнительно способствовать удерживанию целевого объекта, служащего в качестве опорной точки в направлении движения, количество данных, требуемых для хранения данных положений целевого объекта, может быть сокращено. В дополнение, накопленная ошибка в системе координат счисления пути может уменьшаться, и может сдерживаться снижение точности оценки положений транспортного средства.
(4) Устройство оценки положения транспортного средства согласно первому варианту осуществления делает заданное расстояние D2 большим по мере того, как убывает количество N меток целевого объекта, которые блок 31 выявления положений целевого объекта выявил в диапазоне, идущем назад от точки Pt1 поворота на заданное расстояние D2.
Поскольку, как описано выше, становление угла θ1 меньшим по мере того, как количество N меток целевого объекта возрастает, содействует выявлению точки Pt1 поворота в точке, которая, идя назад от текущего местоположения Pn, находится ближе к текущему местоположению Pn, количество данных, требуемых для хранения данных положений целевого объекта, может быть сокращено.
(5) Устройство оценки положения транспортного средства согласно первому варианту осуществления выявляет, вне заданного участка [от (Pp-α) до (Pp+α)], точку на заданном участке, в которой средний угол θtAVE поворота становится не меньшим, чем заданный угол θ2, в качестве точки Pt1 поворота.
Выявление возможного варианта Pp точки поворота в качестве окончательной точки Pt1 поворота, когда средний угол θtAVE поворота становится не меньшим, чем заданный угол θ2, как описано выше, дает возможность сокращаться ложным определениям вследствие виляющих движений, а точке поворота определяться легко и точно.
(6) Устройство оценки положения транспортного средства согласно первому варианту осуществления выявляет точку Pt1 поворота на основании изменений направления движения транспортного средства.
Выявление точки Pt1 поворота посредством расчета угла θt поворота на основании изменений направления движения транспортного средства, как описано выше, дает возможность уменьшаться влиянию от накопленной ошибки в системе координат счисления пути и влиянию от изменений ориентации, как в случае уклонения от препятствия, а точке Pt1 поворота точно выявляться.
(7) Устройство оценки положения транспортного средства согласно первому варианту осуществления удаляет или прореживает данные положений целевого объекта в точках, предшествующих точке [Pn-D3], достигаемой, идя назад от текущего местоположения Pn на предопределенное заданное расстояние D3.
Удаление или прореживание данных положений целевого объекта в точках, предшествующих точке [Pn-D3], как описано выше, дает возможность сдерживаться увеличению количества данных у данных положений целевого объекта.
(8) Способ оценки положения транспортного средства согласно первому варианту осуществления выявляет положения целевых объектов, присутствующих на периферии транспортного средства, выявляет величины перемещений транспортного средства и сохраняет положения целевого объекта в качестве данных положений целевого объекта, на основании выявленных величин перемещений. Способ оценки положения транспортного средства выявляет точку поворота транспортного средства по величинам перемещений транспортного средства. Способ оценки положения транспортного средства удерживает в памяти данные положений целевого объекта в диапазоне от текущего местоположения Pn до заданного расстояния D1, и в диапазоне, идущем назад от точки Pt1 поворота на заданное расстояние D2 до точки [Pt1-D2]. Способ оценки положения транспортного средства получает картографическую информацию, в том числе положения целевых объектов и, посредством сопоставления сохраненных данных положений целевого объекта с положениями целевого объекта в картографической информации, оценивает положение транспортного средства у транспортного средства.
Поскольку, как описано выше, удерживаются в памяти данные положений целевого объекта в диапазоне, идущем назад от текущего местоположения Pn на заданное расстояние D1, и в диапазоне, идущем назад от точки Pt1 поворота на заданное расстояние D2 до точки [Pt1-D2], посредством сопоставления данных положений целевого объекта с картографической информацией, что касается точки Pt1 поворота в качестве опорной точки, положение транспортного средства может однозначно оцениваться. В дополнение, поскольку данные положений целевого объекта в других точках, в том числе, точках в диапазоне [D1-Pt1] и точках, предшествующих точке [Pt1-D2], удаляются или прореживаются, увеличение количества данных у данных положений целевого объекта может сдерживаться и регулироваться надлежащим образом.
Хотя настоящее изобретение было описано со ссылкой на ограниченное количество вариантов осуществления, объем настоящего изобретения не ограничен ими, и модификации соответственных вариантов осуществления, основанных на вышеприведенном изобретении, очевидны специалистам в данной области техники.
Список символов ссылок
11 Устройство оценки положения транспортного средства
12 Радиолокационное устройство
13 Камера
14 База данных карт
15 Группа датчиков
16 Контроллер
21 Транспортное средство
22 Поверхность дороги
23 Бордюрный камень
24 Элемент разметки полосы движения
31 Блок выявления положений целевого объекта
32 Блок выявления величины перемещения
33 Блок хранения положений целевого объекта
34 Блок выявления точки поворота
35 Блок оценки положения транспортного средства




Предложенная группа изобретений относится к средствам для оценки положения транспортных средств. Устройство оценки положения транспортного средства содержит: блок выявления положений целевого объекта; блок выявления величины перемещения; блок хранения положений целевого объекта; блок получения картографической информации; блок оценки положения транспортного средства, выполненный с возможностью, посредством сопоставления данных положений целевого объекта, хранимых в блоке хранения положений целевого объекта, с положениями целевого объекта в картографической информации, оценивать положение транспортного средства у транспортного средства; и блок выявления точки поворота, выполненный с возможностью выявлять точку поворота транспортного средства по величинам перемещений транспортного средства. При этом блок хранения положений целевого объекта удерживает в памяти по меньшей мере данные положений целевого объекта в диапазоне, идущем назад от текущего местоположения на предопределенное первое заданное расстояние, и данные положений целевого объекта в диапазоне, идущем назад от точки поворота на предопределенное второе заданное расстояние. Указанное устройство реализует соответствующий способ оценки положения транспортного средства. Данная группа изобретений позволяет, наряду с сохранением точности оценки положений транспортного средства, обеспечивать возможность регулировки количества данных положений целевого объекта. 2 н и 7 з.п. ф-лы. 19 ил.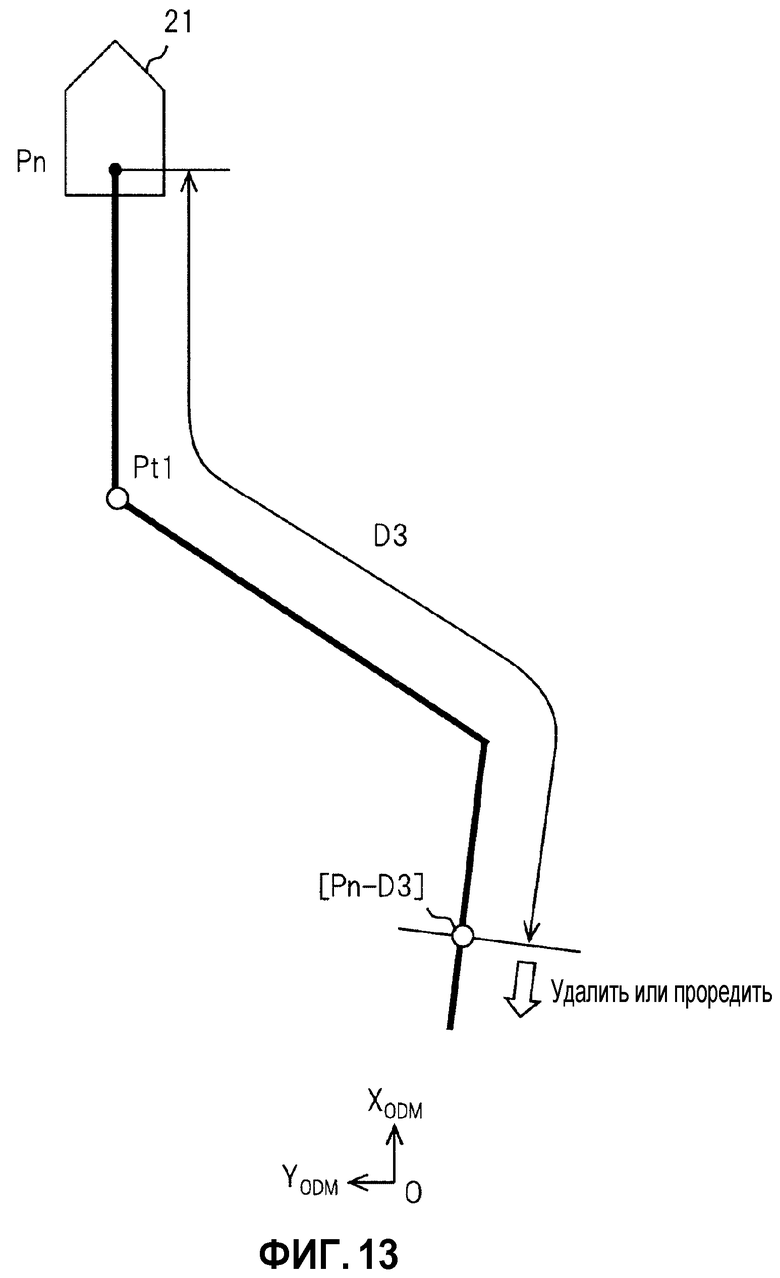
1. Устройство оценки положения транспортного средства, содержащее:
блок выявления положений целевого объекта, выполненный с возможностью выявлять положение целевого объекта, присутствующего на периферии транспортного средства;
блок выявления величины перемещения, выполненный с возможностью выявлять величину перемещения транспортного средства;
блок хранения положений целевого объекта, выполненный с возможностью сохранять положения целевого объекта, выявленные блоком выявления положений целевого объекта, в качестве данных положений целевого объекта на основании величин перемещений, выявленных блоком выявления величины перемещения;
блок получения картографической информации, выполненный с возможностью получать картографическую информацию, в том числе положения целевого объекта;
блок оценки положения транспортного средства, выполненный с возможностью, посредством сопоставления данных положений целевого объекта, хранимых в блоке хранения положений целевого объекта, с положениями целевого объекта в картографической информации, полученной блоком получения картографической информации, оценивать положение транспортного средства у транспортного средства; и
блок выявления точки поворота, выполненный с возможностью выявлять точку поворота транспортного средства по величинам перемещений транспортного средства,
при этом блок хранения положений целевого объекта
удерживает в памяти по меньшей мере данные положений целевого объекта в диапазоне, идущем назад от текущего местоположения на предопределенное первое заданное расстояние, и данные положений целевого объекта в диапазоне, идущем назад от точки поворота на предопределенное второе заданное расстояние.
2. Устройство оценки положения транспортного средства по п. 1, в котором
блок выявления точки поворота
выявляет точку, в которой угол поворота транспортного средства становится не меньшим, чем предопределенный первый заданный угол, в качестве точки поворота, и
по мере того, как количество целевых объектов, выявленных блоком выявления положений целевого объекта в диапазоне, идущем назад от текущего местоположения на первое заданное расстояние, убывает, делает первый заданный угол меньшим.
3. Устройство оценки положения транспортного средства по п. 1 или 2, в котором
блок выявления точки поворота
выявляет точку, в которой угол поворота транспортного средства становится не меньшим, чем предопределенный первый заданный угол, в качестве точки поворота, и
когда, идя назад от текущего местоположения, полоса движения для проезда является прямой линией, и по мере того, как протяженность прямой линии возрастает, делает первый заданный угол меньшим.
4. Устройство оценки положения транспортного средства по п. 1 или 2, в котором
блок хранения положений целевого объекта,
по мере того, как количество целевых объектов, выявленных блоком выявления положений целевого объекта в диапазоне, идущем назад от точки поворота на второе заданное расстояние, убывает, делает второе заданное расстояние большим.
5. Устройство оценки положения транспортного средства по п. 1, в котором
блок выявления точки поворота,
вне предопределенного заданного участка, включающего в себя точку, в которой угол поворота транспортного средства становится не меньшим, чем первый заданный угол, выявляет точку на заданном участке, в которой средний угол поворота становится не меньшим, чем предопределенный второй заданный угол, в качестве точки поворота.
6. Устройство оценки положения транспортного средства по п. 2, в котором
блок выявления точки поворота,
вне предопределенного заданного участка, включающего в себя точку, в которой угол поворота транспортного средства становится не меньшим, чем первый заданный угол, выявляет точку на заданном участке, в которой средний угол поворота становится не меньшим, чем предопределенный второй заданный угол, в качестве точки поворота.
7. Устройство оценки положения транспортного средства по любому одному из пп. 1, 2, 5 и 6, в котором
блок выявления точки поворота
выявляет точку поворота на основании изменений направления движения транспортного средства.
8. Устройство оценки положения транспортного средства по любому одному из пп. 1, 2, 5 и 6, в котором
блок хранения положений целевого объекта
удаляет данные положений целевого объекта в точках, предшествующих точке, достигаемой, идя назад от текущего местоположения на предопределенное третье заданное расстояние.
9. Способ оценки положения транспортного средства, состоящий в том, что:
выявляют положение целевого объекта, присутствующего на периферии транспортного средства, посредством блока выявления положений целевого объекта;
выявляют величину перемещения транспортного средства посредством блока выявления величины перемещения;
сохраняют положения целевого объекта, выявленные блоком выявления положений целевого объекта, в качестве данных положений целевого объекта на основании величин перемещений, выявленных блоком выявления величины перемещения, посредством блока хранения положений целевого объекта;
выявляют, посредством блока выявления точки поворота, точку поворота транспортного средства по величинам перемещений транспортного средства,
удерживают в памяти по меньшей мере данные положений целевого объекта в диапазоне, идущем назад от текущего местоположения на предопределенное первое заданное расстояние, и данные положений целевого объекта в диапазоне, идущем назад от точки поворота на предопределенное второе заданное расстояние, посредством блока хранения положений целевого объекта;
получают картографическую информацию, включающую в себя положения целевого объекта, посредством блока получения картографической информации и
оценивают положение транспортного средства у транспортного средства, сопоставляя данные положений целевого объекта, хранимые в блоке хранения положений целевого объекта, с положениями целевого объекта в картографической информации, полученной блоком получения картографической информации, посредством блока оценки положения транспортного средства.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| US 5550538 A1, 27.08.1996 | |||
| US 6061627 A1, 09.05.2000 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА | 1992 |
|
RU2018085C1 |

