Область техники
[0001]
Настоящее изобретение относится к способу коррекции собственного местоположения и к устройству коррекции собственного местоположения.
Уровень техники
[0002]
Предлагается устройство коррекции местоположения транспортного средства, устройство коррекции местоположения транспортного средства вычисляет величину коррекции местоположения для местоположения транспортного средства путем создания траектории местоположения транспортного средства на основе местоположения транспортного средства, измеренного с помощью навигационного спутника, и сравнения формы полосы движения, в которой транспортное средство движется и его траектории местоположения (см. Патентную литературу 1).
СПИСОК ЦИТАТ
Патентная литература
[0003]
Патентный документ 1: Выложенная патентная публикация Японии №. 2017-58235
Сущность изобретения
Техническая проблема
[0004]
Методика, описанная в Патентной литературе 1, корректирует информацию о местоположении, указывающую текущее местоположение транспортного средства на данных карты, путем добавления величины коррекции местоположения к информации о местоположении. Следовательно, при корректировке информации о местоположении транспортного средства, управляемого для перемещения по заданной трассе (например, автономно-управляемого транспортного средства), если величина корректировки местоположения велика, угол поворота транспортного средства увеличивается из-за корректировки информации о местоположении, и, таким образом, существует проблема риска внезапных изменений и существует проблема риска причинения беспокойства водителю или пассажиру. Внезапные изменения угла поворота из-за такой коррекции местоположения могут произойти, например, когда транспортное средство движется по извилистой дороге.
[0005]
Настоящее изобретение было создано с учетом вышеупомянутых проблем, и задача настоящего изобретения состоит в том, чтобы предоставить способ коррекции собственного местоположения и устройство коррекции собственного местоположения, способное корректировать информацию о местоположении транспортного средства, одновременно подавляя внезапные изменения угла поворота из-за корректировки информации о местоположении транспортного средства.
РЕШЕНИЕ ПРОБЛЕМЫ
[0006]
Чтобы решить вышеупомянутые проблемы, способ коррекции собственного местоположения и/или устройство коррекции собственного местоположения согласно аспекту настоящего изобретения используют координату оси, параллельной направлению вперед-назад транспортного средства, в качестве продольной координаты, вычисляют скорректированную скорость транспортного средства путем добавления скорости транспортного средства к величине коррекции, установленной на основе величины продольной коррекции, полученной вычитанием значения продольной координаты местоположения целевого объекта, обнаруженного блоком обнаружения, из значения продольной координаты местоположения целевого объекта, зарегистрированного на данных карты, и корректируют местоположение транспортного средства на данных карты путем оценки местоположения транспортного средства на основе последовательного интегрирования вычисленной величины перемещения транспортного средства на основе скорректированной скорости транспортного средства и скорости рыскания транспортного средства.
ПОЛОЖИТЕЛЬНЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
[0007]
Согласно настоящему изобретению возможно корректировать информацию о местоположении транспортного средства, управляемого для перемещения по предварительно заданной трассе, при подавлении внезапных изменений угла поворота из-за корректировки информации о местоположении транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008]
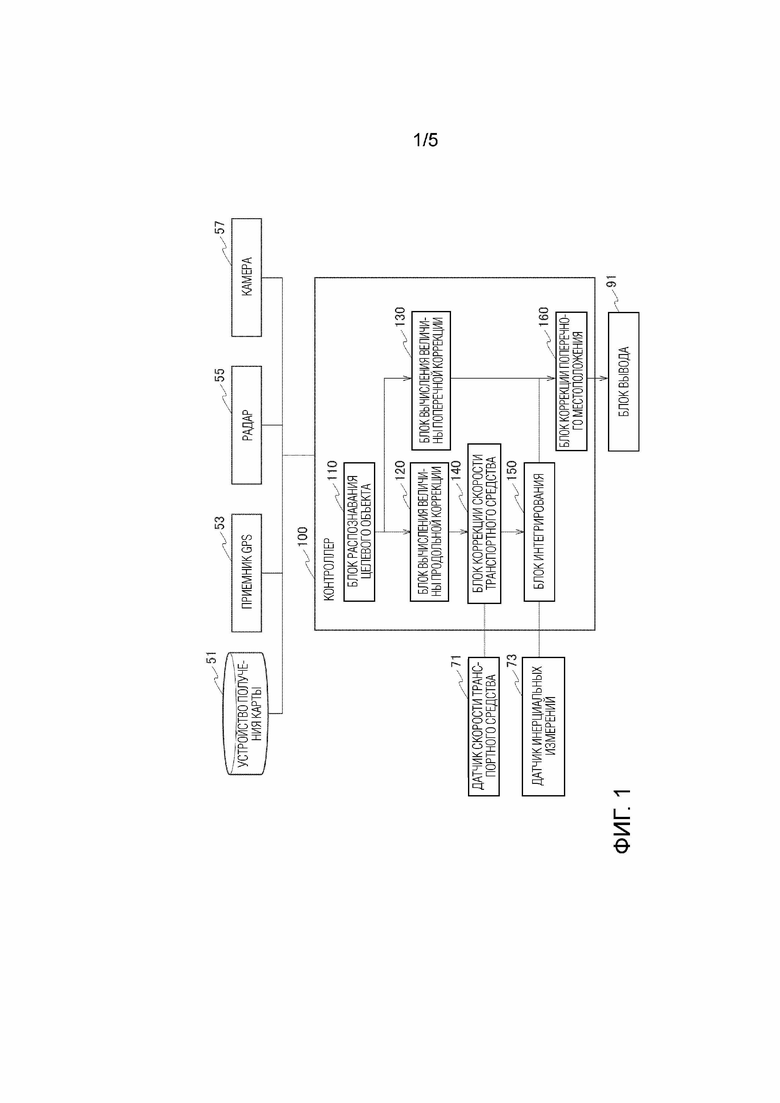
[Фиг. 1] Фиг. 1 - это блок-схема, иллюстрирующая конфигурацию устройства оценки собственного местоположения, включающего в себя устройство коррекции собственного местоположения, согласно варианту осуществления настоящего изобретения.
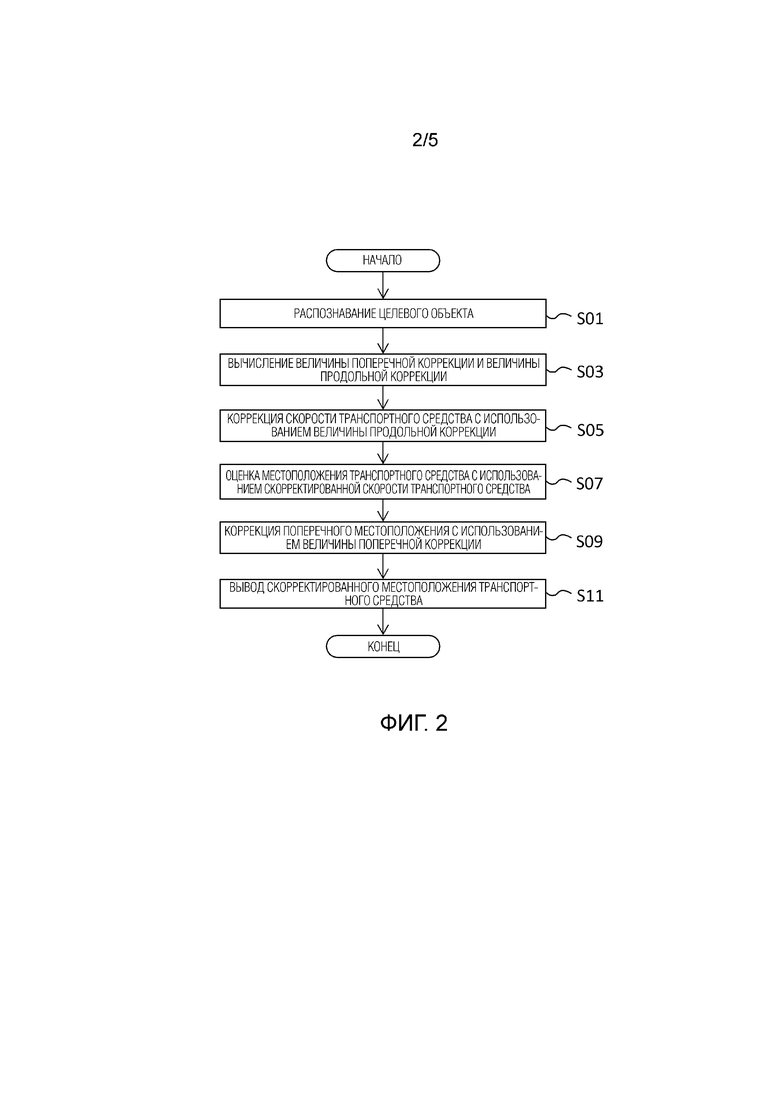
[Фиг. 2] Фиг. 2 - это схема последовательности операций, иллюстрирующая процедуру процесса коррекции собственного местоположения согласно варианту осуществления настоящего изобретения.
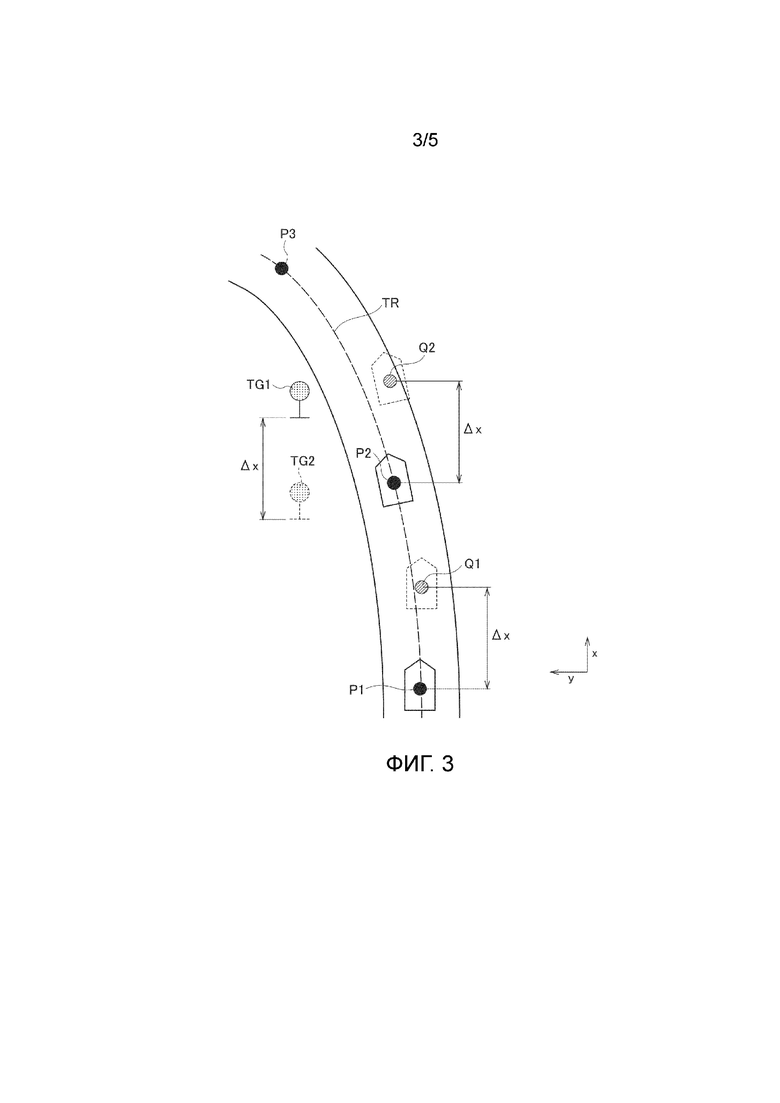
[Фиг. 3] Фиг. 3 - схематическая диаграмма, иллюстрирующая величину продольной коррекции относительно местоположения транспортного средства.
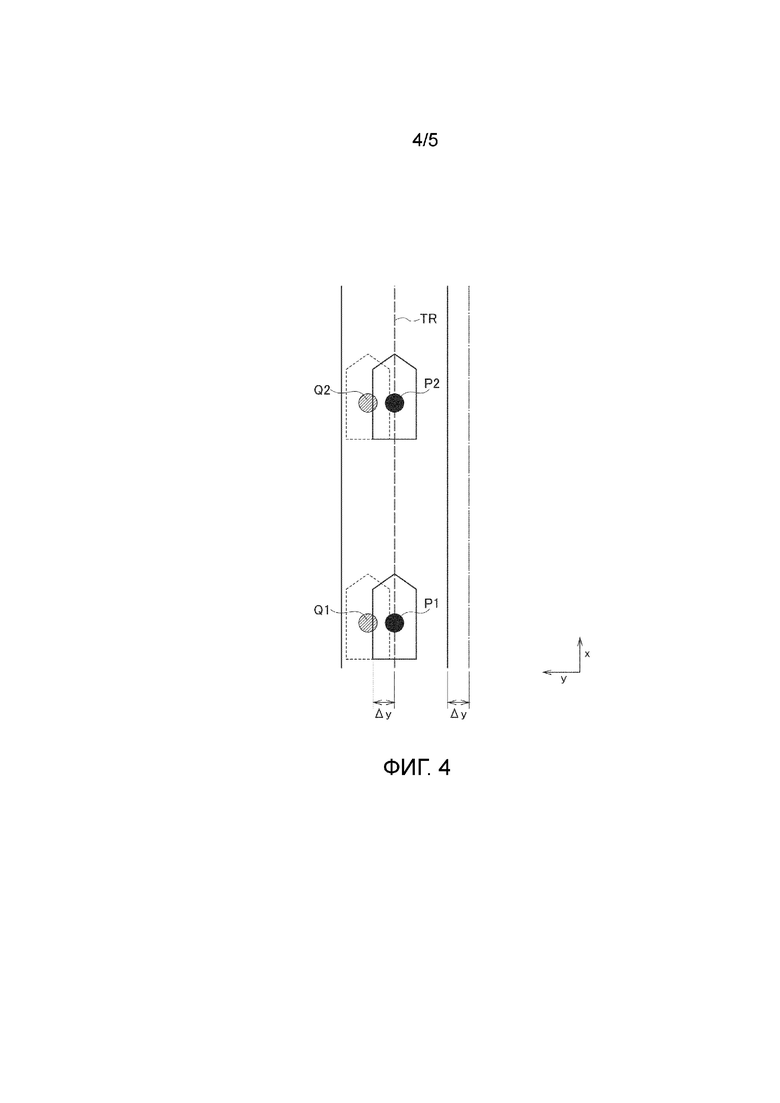
[Фиг. 4] Фиг. 4 - схематическая диаграмма, иллюстрирующая величину поперечной коррекции относительно местоположения транспортного средства.
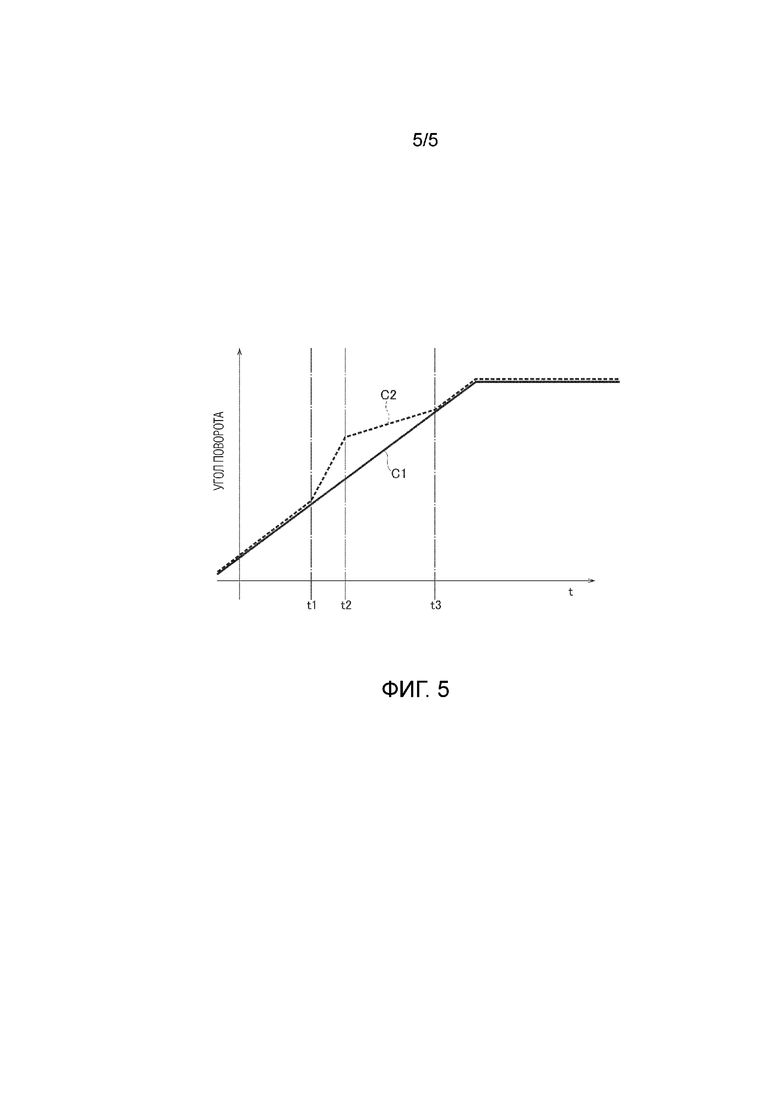
[Фиг. 5] Фиг. 5 - схематический вид, иллюстрирующий изменения угла поворота транспортного средства на извилистой дороге.
Описание вариантов осуществления
[0009]
Далее варианты осуществления настоящего изобретения будут подробно описаны со ссылкой на чертежи. В описании одинаковые элементы обозначены одинаковыми ссылочными позициями, и повторяющееся описание будет опущено.
[0010]
[Конфигурация устройства коррекции собственного местоположения]
Фиг.1 - это блок-схема, иллюстрирующая конфигурацию устройства оценки собственного местоположения, включающего в себя устройство коррекции собственного местоположения, согласно варианту осуществления настоящего изобретения. Как показано на Фиг.1, устройство оценки собственного местоположения включает в себя устройство 51 получения карты, приемник 53 GPS, радар 55, камеру 57, датчик 71 скорости транспортного средства, датчик 73 инерциальных измерений, контроллер 100 и блок 91 вывода.
[0011]
Здесь приемник 53 GPS, радар 55, камера 57, датчик 71 скорости транспортного средства и датчик 73 инерциальных измерений установлены на транспортном средстве. Устройство 51 получения карты, контроллер 100 и блок 91 вывода могут быть установлены на транспортном средстве или могут быть установлены вне транспортного средства. Устройство 51 получения карты, приемник 53 GPS, радар 55, камера 57, датчик 71 скорости транспортного средства, датчик 73 инерциальных измерений и блок 91 вывода подключены к контроллеру 100 проводным или беспроводным каналом связи.
[0012]
Устройство 51 получения карты получает данные карты, указывающие структуру дороги, по которой движется транспортное средство. Данные карты, полученные устройством 51 получения карты, включают в себя информацию о структуре дороги, такую как абсолютные местоположения полос движения, взаиморасположения между полосами движения и относительные позиционные взаиморасположения. Кроме того, данные карты, полученные устройством 51 получения карты, могут включать в себя информацию об объектах, таких как парковка и заправочная станция. Кроме того, данные карты могут включать в себя информацию о местоположении светофора, типе светофора и т.п. Устройство 51 получения карты может владеть базой данных карт, в которой хранятся данные карты, или может получать данные карты с внешнего сервера данных карты с помощью облачных вычислений. Кроме того, устройство 51 получения карты может получать данные карты, используя связь между транспортными средствами и связь дороги с транспортными средствами.
[0013]
Приемник 53 GPS определяет местоположение транспортного средства на земле путем приема радиоволн от спутника GPS (глобальной системы позиционирования).
[0014]
Радар 55 излучает радиоволны в направлении окружения транспортного средства и измеряет отраженные волны для обнаружения трехмерных объектов поблизости от транспортного средства, таких как дорожные знаки и здания.
[0015]
Камера 57 снимает изображение, окружения транспортного средства, и получает изображение, на котором зафиксирована белая продольная разметка, стоп-линия и т.п. поблизости от транспортного средства.
[0016]
Приемник 53 GPS, радар 55 и камера 57 вместе далее именуются блоком обнаружения. Приведенные здесь примеры являются примерами блока обнаружения и не ограничиваются этими примерами. Например, блок обнаружения может быть устройством обнаружения и определения дальности с помощью лазера (LiDAR) (не показано).
[0017]
Датчик 71 скорости транспортного средства определяет скорость транспортного средства. Датчик 71 скорости транспортного средства может определять скорость транспортного средства по скорости вращения колес транспортного средства или может определять относительную скорость относительно дороги, по которой движется транспортное средство, посредством эффекта Доплера или тому подобного.
[0018]
Датчик 73 инерциальных измерений включает в себя датчик ускорения, который определяет ускорение, приложенное к транспортному средству, датчик углового ускорения вращения и гироскопический датчик, который определяет угловую скорость вращения транспортного средства, и датчик магнитного поля, который определяет ориентацию транспортного средства. В частности, датчик 73 инерциальных измерений определяет скорость рыскания транспортного средства.
[0019]
Блок 91 вывода выводит результат обработки контроллера 100, который будет описан позже. Например, блок 91 вывода выводит положение транспортного средства после выполнения коррекции собственного местоположения в устройство автоматического вождения (не показано).
[0020]
Контроллер 100 (пример блока управления или блока обработки) представляет собой микрокомпьютер общего назначения, включающий в себя CPU (центральный процессор), память и блок ввода/вывода. Компьютерная программа (программа коррекции собственного местоположения) для работы в качестве устройства коррекции собственного местоположения установлена в контроллере 100. Выполняя компьютерную программу, контроллер 100 функционирует как множество схем обработки информации (110, 120, 130, 140, 150, 160).
[0021]
Здесь показан пример, в котором множество схем обработки информации (110, 120, 130, 140, 150, 160), включенных в устройство коррекции собственного местоположения, реализовано программно. Однако также возможно сконфигурировать схемы обработки информации (110, 120, 130, 140, 150, 160), подготовив выделенное аппаратное обеспечение для выполнения каждой из следующих операций обработки информации. Кроме того, множество схем обработки информации (110, 120, 130, 140, 150, 160) может быть сконфигурировано индивидуальным аппаратным обеспечением. Кроме того, схема обработки информации (110, 120, 130, 140, 150, 160) также может использоваться в качестве электронного блока управления (ЭБУ), используемого для другого управления, связанного с транспортным средством.
[0022]
Контроллер 100, как множество схем обработки информации (110, 120, 130, 140, 150, 160), включает в себя блок 110 распознавания целевого объекта, блок 120 вычисления величины продольной коррекции, блок 130 вычисления величины поперечной коррекции, блок 140 коррекции скорости транспортного средства, блок 150 интегрирования и блок 160 коррекции поперечного местоположения.
[0023]
Блок 110 распознавания целевого объекта распознает целевой объект, который служит эталоном для определения местоположения транспортного средства, и вычисляет относительное позиционное взаиморасположение между распознанным целевым объектом и транспортным средством.
[0024]
Примером блока 110 распознавания целевого объекта является блок распознавания местоположения на основе приемника 53 GPS. В дополнение к этому, примером блока 110 распознавания целевого объекта может быть блок распознавания ориентира, который обнаруживает трехмерный объект (неподвижный объект) поблизости от транспортного средства, такой как дорожный знак или здание, с помощью радара 55 или устройства обнаружения и определения дальности с помощью лазера (LiDAR) (не показано), блок распознавания белой продольной разметки, который распознает белую продольную разметку поблизости от транспортного средства на основе изображений, снятых камерой 57, блок распознавания стоп-линии, который обнаруживает стоп-линию и т.п.
[0025]
В дальнейшем неподвижные цели, такие как белые продольные разметки, стоп-линии и другие дорожные знаки поблизости от транспортного средства, дорожные знаки и трехмерные объекты поблизости от транспортного средства, такие как здания, называются целевым объектом.
[0026]
В частности, блок 110 распознавания целевого объекта устанавливает координату оси, параллельной направлению вперед-назад транспортного средства, в качестве продольной координаты и вычисляет значение продольной координаты местоположения целевого объекта, обнаруженного блоком обнаружения, в качестве первого наблюдаемого значения. Кроме того, блок 110 распознавания целевого объекта устанавливает координату оси, параллельной направлению ширины транспортного средства, в качестве поперечной координаты и вычисляет значение поперечной координаты местоположения целевого объекта, обнаруженного блоком обнаружения, в качестве второго наблюдаемого значения.
[0027]
Система координат, определяемая продольной координатой и поперечной координатой, называется системой координат транспортного средства. Система координат транспортного средства отличается от системы координат карты, используемой для представления информации о местоположении, зарегистрированной в данных карты, но если местоположение и ориентация транспортного средства в системе координат карты и местоположение транспортного средства в системе координат транспортного средства определены, система координат карты и система координат транспортного средства могут быть связаны друг с другом преобразованием координат (преобразованием путем параллельного перемещения и вращения). То есть, используя преобразование координат, информация о местоположении, представленная системой координат карты, может быть преобразована в информацию о местоположении в системе координат транспортного средства.
[0028]
Блок 120 вычисления величины продольной коррекции извлекает информацию о местоположении, зарегистрированную в данных карты, для целевого объекта, распознанного блоком 110 распознавания целевого объекта, из данных карты, полученных устройством 51 получения карты, выполняет преобразование координат для извлеченной информации о местоположении, и вычисляет значение продольной координаты местоположения распознанного целевого объекта в качестве первого зарегистрированного значения. Затем блок 120 вычисления величины продольной коррекции вычисляет величину продольной коррекции путем вычитания первого наблюдаемого значения из первого зарегистрированного значения.
[0029]
Расчет величины продольной коррекции поясняется со ссылкой на Фиг.3. Фиг.3 - схематическая диаграмма, иллюстрирующая величину продольной коррекции относительно местоположения транспортного средства. На Фиг. 3 предполагается, что транспортное средство находится в точке P1.
[0030]
Здесь предполагается, что целевой объект, зарегистрированный как находящийся в местоположении TG1 на данных карты, распознается как находящийся в местоположении TG2 блоком 110 распознавания целевого объекта. При сравнении местоположения TG1 и местоположения TG2, местоположение TG2 ближе к точке P1 на Δx в продольной координате, чем местоположение TG1 в системе координат транспортного средства, расположенного в местоположении P1.
[0031]
Это означает, что оценка того, что транспортное средство находится в точке P1, включает ошибку, и, другими словами, это означает, что транспортное средство находится в точке Q1, расположенной впереди на Δx по продольной координате от точки P1 в направлении вперед транспортного средства (или в направлении перемещения транспортного средства, в направлении оси x на фигуре). Следовательно, Δx обрабатывается как величина продольной коррекции для корректировки местоположения P1 транспортного средства в местоположение Q1.
[0032]
Кроме того, следует отметить время, в которое блок 120 вычисления величины продольной коррекции может вычислить величину продольной коррекции. Обычно величина продольной коррекции вычисляется в момент времени, когда целевой объект, расположенный впереди или позади транспортного средства, может быть распознан. Однако целевой объект, расположенный впереди или позади транспортного средства, может быть не распознан, потому что он защищен другим транспортным средством, движущимся поблизости от транспортного средства. В таком случае величина продольной коррекции не может быть вычислена.
[0033]
Блок 130 вычисления величины поперечной коррекции извлекает информацию о местоположении, зарегистрированную в данных карты, относительно целевого объекта, распознанного блоком 110 распознавания целевого объекта, из данных карты, полученных устройством 51 получения карты, выполняет преобразование координат для извлеченной информации о местоположении и вычисляет значение поперечной координаты местоположения распознанного целевого объекта в качестве второго зарегистрированного значения. Затем блок 130 вычисления величины поперечной коррекции вычисляет величину поперечной коррекции путем вычитания второго наблюдаемого значения из второго зарегистрированного значения.
[0034]
Расчет величины поперечной коррекции поясняется со ссылкой на Фиг.4. Фиг.4 - схематическая диаграмма, иллюстрирующая величину поперечной коррекции относительно местоположения транспортного средства. На Фиг.4 предполагается, что транспортное средство находится в точке P1, расположенной в центре TR в направлении ширины дороги.
[0035]
Здесь, в результате распознавания белой продольной разметки дороги блоком 110 распознавания целевого объекта, предполагается, что распознается, что белая продольная разметка существует в местоположении, отклоненном на Δy вправо в направлении ширины транспортного средства от местоположения, зарегистрированного в данных карты.
[0036]
Это означает, что оценка того, что транспортное средство находится в точке P1, включает ошибку, и, другими словами, это означает, что транспортное средство находится в точке Q1, расположенной с левой стороны в направлении ширины транспортного средства на Δy по поперечной координате от точки P1 (или в направлении оси y на фигуре). Следовательно, Δy обрабатывается как величина поперечной коррекции для корректировки местоположения P1 транспортного средства в местоположение Q1.
[0037]
Кроме того, следует отметить момент времени, в который блок 130 вычисления величины поперечной коррекции может вычислить величину поперечной коррекции. Обычно величина поперечной коррекции вычисляется в момент, когда целевой объект, расположенный сбоку от транспортного средства, может быть распознан. По сравнению с целевым объектом, расположенным впереди или позади транспортного средства, целевой объект, расположенный сбоку от транспортного средства, редко блокируется другими транспортными средствами, движущимися поблизости от транспортного средства, и не может быть распознан. Следовательно, количество моментов времени, в которые может быть вычислена величина поперечной коррекции, имеет тенденцию быть больше, чем количество моментов времени, в которые может быть вычислена величина продольной коррекции.
[0038]
Кроме того, в случае, когда имеется множество целевых объектов, распознанных блоком 110 распознавания целевого объекта, блок 120 вычисления величины продольной коррекции вычисляет величину продольной коррекции для каждого распознанного целевого объекта и вычисляет среднее значение множества величин продольной коррекции как типичную величину продольной коррекции. Точно так же, блок 130 вычисления величины поперечной коррекции может вычислять величину поперечной коррекции для каждого распознанного целевого объекта и может вычислять среднее значение множества величин поперечной коррекции как типичную величину поперечной коррекции.
[0039]
Блок 140 коррекции скорости транспортного средства устанавливает величину коррекции для скорости транспортного средства, обнаруженной датчиком 71 скорости транспортного средства, на основе величины продольной коррекции.
[0040]
Например, блок 140 коррекции скорости транспортного средства может устанавливать величину Δv коррекции так, что чем больше величина Δx продольной коррекции, тем больше устанавливается значение (Δv/v), где значение (Δv/v) получается делением величины Δv коррекции для скорости транспортного средства на скорость v транспортного средства.
[0041]
Блок 140 коррекции скорости транспортного средства может установить величину Δv коррекции так, что Δv/v увеличивается ступенчато по мере увеличения величины Δx продольной коррекции (например, Δv/v устанавливается на 1% в случае, когда величина продольной коррекции Δx меньше предварительно определенного значения, и Δv/v устанавливается равным 10% в случае, когда величина Δx продольной коррекции равна или больше предварительно определенного значения и т.д.).
[0042]
Блок 140 коррекции скорости транспортного средства может устанавливать Δv так, чтобы Δv/v непрерывно увеличивалось по мере увеличения величины Δx продольной коррекции.
[0043]
Кроме того, величина Δv коррекции может быть установлена путем умножения величины Δx продольной коррекции на положительный заранее определенный коэффициент α (то есть «Δv = α·Δx»).
[0044]
Блок 140 коррекции скорости транспортного средства добавляет величину коррекции, установленную, как описано выше, к скорости транспортного средства, обнаруженной датчиком 71 скорости транспортного средства, для вычисления скорректированной скорости транспортного средства.
[0045]
Блок 150 интегрирования оценивает местоположение транспортного средства на данных карты, используя метод счисления пути. То есть величина перемещения (компонент вектора) транспортного средства в течение заранее определенного интервала времени вычисляется на основе скорости транспортного средства и скорости рыскания транспортного средства, и вычисленная величина перемещения последовательно интегрируется для оценки местоположения транспортного средства на данных карты. То есть блок 150 интегрирования оценивает местоположение транспортного средства на данных карты в текущий момент времени путем интегрирования количества перемещения транспортного средства в единицу времени с прошлого времени на текущее время, начиная с местоположения транспортного средства в определенное прошедшее время.
[0046]
При обычном счислении пути, величина перемещения транспортного средства вычисляется на основе скорости транспортного средства, обнаруженной датчиком 71 скорости транспортного средства, и скорости рыскания транспортного средства, обнаруженной датчиком 73 инерциальных измерений. С другой стороны, в блоке 150 интегрирования настоящего варианта осуществления вместо использования скорости транспортного средства, обнаруженной датчиком 71 скорости транспортного средства, скорректированная скорость транспортного средства, вычисленная блоком 140 коррекции скорости транспортного средства, используется для вычисления величины перемещения транспортного средства.
[0047]
Если интервал времени равен Δt, величина перемещения транспортного средства вычисляется с использованием скорректированной скорости транспортного средства, поэтому величина коррекции «Δv·Δt» добавляется к величине перемещения за один раз в процессе выполнения счисления пути. Когда величина коррекции «Δv·Δt», добавленная к каждой из множества величин перемещения, вычисленных в процессе выполнения счисления пути, складывается вместе, величина добавленных величин коррекции приближается к величине продольной коррекции Δx, поскольку величины перемещения последовательно интегрированы. Следовательно, после того, как достаточное количество величин перемещения интегрировано посредством счисления пути, коррекция на величину Δx продольной коррекции завершается.
[0048]
После того, как интегрирование величины перемещения за один раз завершено, блок 150 интегрирования вычитает величину коррекции «Δv·Δt», включенную в величину перемещения за один раз, из величины продольной коррекции, чтобы вычислить величину продольной коррекции после вычитания. Величина продольной коррекции после вычитания используется в блоке 140 коррекции скорости транспортного средства для установки величин коррекции начиная со следующего раза.
[0049]
Кроме того, в случае, когда величина продольной коррекции равна или меньше предварительно определенного порогового значения, блок 150 интегрирования может добавить величину продольной коррекции к значению продольной координаты транспортного средства, чтобы скорректировать местоположение транспортного средства. Здесь предварительно определенное пороговое значение определяется с учетом уровня, на котором водитель или пассажир может игнорировать внезапное колебание угла поворота, вызванное добавлением величины продольной коррекции к значению продольной координаты транспортного средства.
[0050]
Например, в случае, когда запланированный маршрут движения транспортного средства является прямой линией, даже если величина продольной коррекции добавляется к значению продольной координаты транспортного средства, чтобы исправить местоположение транспортного средства, то скорректированное местоположение транспортного средства существенно не отклоняется от запланированного маршрута движения. Следовательно, в случае, когда радиус кривизны запланированного маршрута движения транспортного средства мал, вышеупомянутое заранее определенное пороговое значение может быть установлено небольшим, а в случае, когда радиус кривизны запланированного маршрута движения транспортного средства является большим, вышеупомянутое заранее определенное пороговое значение может быть установлено большим.
[0051]
Блок 160 коррекции поперечного местоположения добавляет величину поперечной коррекции к значению поперечной координаты транспортного средства, чтобы скорректировать местоположение транспортного средства.
[0052]
Коррекция местоположения транспортного средства на основе величины поперечной коррекции блоком 160 коррекции поперечного местоположения отличается от коррекции местоположения транспортного средства на основе величины продольной коррекции посредством обработки блоком 140 коррекции скорости транспортного средства и блоком 150 интегрирования. В частности, коррекция местоположения транспортного средства на основе величины продольной коррекции корректирует скорость транспортного средства, тогда как коррекция местоположения транспортного средства на основе величины поперечной коррекции выполняется непосредственно в отношении местоположения транспортного средства.
[0053]
Поскольку количество моментов времени, в которые может быть вычислена величина поперечной коррекции, имеет тенденцию быть больше, чем количество моментов времени, в которые может быть вычислена величина продольной коррекции, коррекция местоположения транспортного средства на основе величины поперечной коррекции имеет тенденцию должно выполняться чаще, чем коррекция местоположения транспортного средства на основе величины продольной коррекции. Таким образом, величина поперечной коррекции имеет тенденцию быть менее большой по сравнению с величиной продольной коррекции. Кроме того, поскольку скорость транспортного средства в направлении ширины транспортного средства меньше, чем скорость транспортного средства в направлении вперед-назад транспортного средства, величина поперечной коррекции имеет тенденцию быть менее значительной по сравнению с величиной продольной коррекции. Следовательно, даже если местоположение транспортного средства корректируется непосредственно относительно местоположения транспортного средства на основе величины поперечной коррекции, вероятность того, что угол поворота внезапно изменится, мала.
[0054]
[Процедура обработки устройства коррекции собственного местоположения]
Процедура обработки коррекции собственного местоположения устройством коррекции собственного местоположения согласно настоящему варианту осуществления поясняется далее со ссылкой на блок-схему на Фиг.2. Процесс коррекции собственного местоположения, показанный на Фиг. 2, начинается при включении зажигания транспортного средства и осуществляется повторно при включенном зажигании.
[0055]
На этапе S01, блок 110 распознавания целевого объекта распознает целевой объект в качестве ориентира для определения местоположения транспортного средства и вычисляет относительное позиционное взаиморасположение между распознанным целевым объектом и транспортным средством.
[0056]
На этапе S03, блок 120 вычисления величины продольной коррекции вычисляет величину продольной коррекции, а блок 130 вычисления величины поперечной коррекции вычисляет величину поперечной коррекции.
[0057]
На этапе S05, блок 140 коррекции скорости транспортного средства устанавливает величину коррекции для обнаруженной скорости транспортного средства на основе величины продольной коррекции, добавляет величину коррекции к обнаруженной скорости транспортного средства и вычисляет скорректированную скорость транспортного средства.
[0058]
На этапе S07, блок 150 интегрирования вычисляет величину перемещения транспортного средства, используя вычисленную скорректированную скорость транспортного средства, интегрирует величину перемещения и оценивает местоположение транспортного средства.
[0059]
На этапе S09, блок 160 коррекции поперечного местоположения добавляет величину поперечной коррекции к значению поперечной координаты транспортного средства, чтобы скорректировать местоположение транспортного средства.
[0060]
На этапе S11 блок 91 вывода выводит местоположение транспортного средства после выполнения коррекции.
[0061]
[Эффект варианта осуществления ]
Как подробно объяснено выше, во время оценки местоположения транспортного средства на данных карты на основе последовательного интегрирования величины перемещения транспортного средства, способ коррекции собственного местоположения и/или устройство коррекции собственного местоположения согласно настоящему варианту осуществления используют координату оси, параллельной направлению вперед-назад транспортного средства, в качестве продольной координаты, вычисляют скорректированную скорость транспортного средства, добавляя скорость транспортного средства к величине коррекции, установленной на основе величины продольной коррекции, полученной вычитанием значения продольной координаты местоположения целевого объекта, обнаруженного блоком обнаружения, из значения продольной координаты местоположения целевого объекта, зарегистрированного в данных карты, и корректируют местоположение транспортного средства на данных карты путем оценки местоположения транспортного средства на основе последовательного интегрирования вычисленной величины перемещения транспортного средства на основе скорректированной скорости транспортного средства и скорости рыскания транспортного средства.
[0062]
В результате величина продольной коррекции не добавляется напрямую к продольной координате транспортного средства, так что внезапные изменения угла поворота из-за коррекции местоположения подавляются. С другой стороны, при выполнении счисления пути величина коррекции добавляется к продольной координате транспортного средства через величину коррекции скорости транспортного средства, а величина добавленной величины коррекции приближается к величине продольной коррекции, поскольку величины перемещения последовательно интегрированы. Таким образом, можно надежно скорректировать местоположение транспортного средства.
[0063]
Как может быть объяснено посредством Фиг. 3 и 5, внезапные изменения угла поворота подавляются путем добавления величины коррекции к продольной координате транспортного средства через величину коррекции скорости транспортного средства вместо прямого добавления величины продольной коррекции к продольной координате транспортного средства. Например, как показано на Фиг. 3, предполагается, что транспортное средство находится в точке P1. Предполагается, что величина перемещения за один раз в процессе выполнения счисления пути рассчитывается на основе скорости транспортного средства и скорости рыскания транспортного средства, расположенного в точке P1, и предполагается, что транспортное средство перемещается из точки P1 в точку P2 после заранее определенного интервала времени.
[0064]
Здесь, в случае, когда величина Δx продольной коррекции добавляется непосредственно к продольной координате транспортного средства в точке P1 (т.е. в случае, когда вся величина Δx продольной коррекции добавляется к продольной координате транспортного средства за один этап счисления пути), местоположение транспортного средства корректируется с точки P1 на точку Q1. Однако, поскольку величина перемещения за один раз в процессе выполнения счисления пути, которая рассчитывается на основе скорости транспортного средства и скорости рыскания транспортного средства, расположенного в точке P1, не корректируется, вычисляется, что транспортное средство движется из точки Q1 в точку Q2 после заданного интервала времени. Здесь вектор, начинающийся из точки P1 и заканчивающийся точкой P2, и вектор, начинающийся из точки Q1 и заканчивающийся в точке Q2, имеют одинаковую величину и направление.
[0065]
Следовательно, в случае, когда величина Δx продольной коррекции добавляется непосредственно к продольной координате транспортного средства в точке P1, если величина Δx продольной коррекции велика, скорректированное местоположение транспортного средства становится точкой Q2, которая значительно отклоняется от маршрута, по которому транспортное средство должно было изначально двигаться (маршрут TR на Фиг. 3), и существует вероятность того, что угол поворота может внезапно измениться, как показано на графике C2 на Фиг. 5. На Фиг.5 показано, что угол поворота внезапно изменяется от момента t1 до момента t3 в результате коррекции величины продольной коррекции, выполняемой во время t1. Как показано на графике C2, скорость изменения угла поворота во времени является прерывистой в момент времени t1, момент времени t2 и момент времени t3.
[0066]
С другой стороны, в случае, когда величина коррекции добавляется к продольной координате транспортного средства через величину коррекции скорости транспортного средства, величина Δx продольной коррекции делится и добавляется к продольной координате транспортного средства во множестве этапов счисления пути. Следовательно, не существует возможности того, что скорректированное местоположение транспортного средства значительно отклонится от маршрута, по которому транспортное средство должно было изначально двигаться (маршрут TR на Фиг. 3).
[0067]
В случае, когда величина коррекции добавляется к продольной координате транспортного средства через величину коррекции скорости транспортного средства, угол поворота не изменяется внезапно, как показано на графике C1 на Фиг.5, и подавляется то, что скорость изменения угла поворота во времени становится прерывистой.
[0068]
Кроме того, способ коррекции собственного местоположения и/или устройство коррекции собственного местоположения согласно настоящему варианту осуществления могут устанавливать значение, полученное путем деления величины коррекции на скорость транспортного средства, большим по мере того, как увеличивается величина продольной коррекции. В результате, чем больше величина продольной коррекции и чем больше скорость транспортного средства, тем большей устанавливается величина коррекции скорости транспортного средства. Таким образом, время до корректировки местоположения транспортного средства может быть сокращено, в то же время подавляя внезапные изменения угла поворота из-за корректировки местоположения. В результате можно скорректировать местоположение транспортного средства за более короткое время по сравнению со случаем, когда величина коррекции установлена так, что значение, полученное путем деления величины коррекции на скорость транспортного средства, является постоянным независимо от величины продольной коррекции.
[0069]
Кроме того, способ коррекции собственного местоположения и/или устройство коррекции собственного местоположения согласно настоящему варианту осуществления могут устанавливать величину коррекции путем умножения величины продольной коррекции на положительный заранее определенный коэффициент. В результате, чем больше величина продольной коррекции, тем большей устанавливается величина коррекции скорости транспортного средства. Таким образом, можно сократить время до корректировки местоположения транспортного средства, подавляя внезапные изменения угла поворота из-за корректировки местоположения. Кроме того, регулируя величину заранее определенного коэффициента, можно контролировать время до корректировки местоположения транспортного средства.
[0070]
Кроме того, способ коррекции собственного местоположения и/или устройство коррекции собственного местоположения согласно настоящему варианту осуществления могут добавлять величину продольной коррекции к значению продольной координаты транспортного средства в случае, когда величина продольной коррекции равна или меньше заданного порогового значения. В результате, если ожидается, что колебание угла поворота, которое происходит, когда величина продольной коррекции добавляется непосредственно к продольной координате транспортного средства, достаточно мало по сравнению с уровнем колебания, ощущаемым водителем или пассажиром, можно скорректировать местоположение транспортного средства непосредственно на основе величины продольной коррекции, и местоположение транспортного средства может быть скорректировано за более короткое время.
[0071]
Кроме того, способ коррекции собственного местоположения и/или устройство коррекции собственного местоположения согласно настоящему варианту осуществления может использовать координату оси, параллельной направлению ширины транспортного средства, в качестве поперечной координаты и может добавлять величину поперечной коррекции к значению поперечной координаты транспортного средства, при этом величина поперечной коррекции получается путем вычитания значения поперечной координаты местоположения целевого объекта, обнаруженного блоком обнаружения, из значения поперечной координаты местоположения целевого объекта, зарегистрированного на карте данных. В результате можно корректировать местоположение транспортного средства на основе величины поперечной коррекции с меньшей вычислительной нагрузкой, чем при коррекции местоположения транспортного средства на основе величины продольной коррекции. Кроме того, местоположение транспортного средства можно скорректировать за короткое время на основе величины поперечной коррекции.
[0072]
Соответствующие функции, описанные в вышеупомянутом варианте осуществления, могут быть реализованы одной или несколькими схемами обработки. Схемы обработки включают в себя запрограммированные устройства обработки, такие как устройство обработки, включающее в себя электрическую схему, и включают в себя такие устройства, как специализированная интегральная схема (ASIC) и традиционные элементы схемы, которые выполнены с возможностью выполнения функций, описанных в варианте осуществления.
[0073]
Хотя содержание настоящего изобретения было описано выше со ссылкой на вариант осуществления, настоящее изобретение не ограничивается этими описаниями, и для специалистов в данной области техники будет очевидно, что могут быть сделаны различные модификации и улучшения. Не следует толковать, что настоящее изобретение ограничено описаниями и чертежами, которые составляют часть настоящего раскрытия. На основе настоящего раскрытия для специалистов в данной области техники будут очевидны различные альтернативные варианты осуществления, практические примеры и способы работы.
[0074]
Нет необходимости упоминать, что настоящее изобретение также включает в себя различные варианты осуществления, которые здесь не описаны. Следовательно, технический объем настоящего изобретения должен определяться только изобретением, определяющим объем охраны в соответствии с объемом формулы изобретения, соответствующим образом полученным из приведенных выше описаний.
СПИСОК ПОЗИЦИОННЫХ ОБОЗНАЧЕНИЙ
[0075]
51 - устройство получения карты
53 GPS-приемник
55 Радар
57 Камера
71 Датчик скорости транспортного средства
73 датчик инерциальных измерений
91 блок вывода
100 контроллер
110 блок распознавания целевого объекта
120 блок расчета величины продольной коррекции 120
130 блок расчета величины поперечной коррекции
140 блок коррекции скорости транспортного средства
150 блок интегрирования
160 блок коррекции поперечного местоположения
Изобретение относится к способу коррекции собственного местоположения и к устройству коррекции собственного местоположения. При помощи способа коррекции собственного местоположения и устройства коррекции собственного местоположения в соответствии с аспектом настоящего изобретения получают данные карты, текущую скорость транспортного средства, а также величину рысканья, используют координату оси, параллельной направлению вперед-назад транспортного средства, в качестве продольной координаты. Затем вычисляют скорректированную скорость транспортного средства путем добавления скорости транспортного средства к величине коррекции, установленной на основе величины продольной коррекции, полученной вычитанием значения продольной координаты местоположения целевого объекта, обнаруженного блоком обнаружения, из значения продольной координаты местоположения целевого объекта, зарегистрированного на данных карты. После чего корректируют местоположение транспортного средства на данных карты путем оценки местоположения транспортного средства на основе последовательного интегрирования вычисленной величины перемещения транспортного средства на основе скорректированной скорости транспортного средства и скорости рыскания транспортного средства. Технический результат – обеспечение возможности коррекции информации о местоположении транспортного средства. 2 н. и 4 з.п. ф-лы, 5 ил.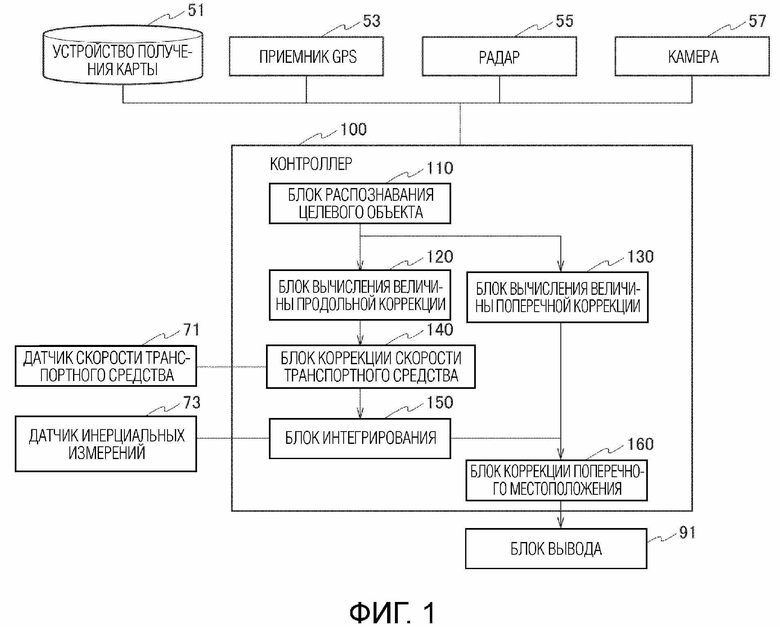
1. Способ коррекции собственного местоположения для корректировки местоположения транспортного средства на данных карты, которое оценивается путем последовательного интегрирования величины перемещения транспортного средства на основе результата измерения от блока обнаружения, который обнаруживает целевой объект поблизости от транспортного средства, при этом способ коррекции собственного местоположения, содержит:
получение данных карты, текущей скорости транспортного средства, а также величины рысканья,
использование координаты оси, параллельной направлению вперед-назад транспортного средства, в качестве продольной координаты,
установку значения продольной координаты местоположения целевого объекта, зарегистрированного в данных карты, в качестве первого зарегистрированного значения,
установку значения продольной координаты местоположения целевого объекта, обнаруженного блоком обнаружения, в качестве первого наблюдаемого значения,
установку величины коррекции на основе величины продольной коррекции, полученной вычитанием первого наблюдаемого значения из первого зарегистрированного значения,
вычисление скорректированной скорости транспортного средства путем добавления величины коррекции к скорости транспортного средства для транспортного средства,
вычисление величины перемещения транспортного средства на основе скорректированной скорости транспортного средства и скорости рыскания транспортного средства, и
оценку местоположения транспортного средства путем последовательного интегрирования количества перемещения.
2. Способ коррекции собственного местоположения по п. 1, в котором
значение, полученное путем деления величины коррекции на скорость транспортного средства, устанавливается большим по мере увеличения величины продольной коррекции.
3. Способ коррекции собственного местоположения по п. 1 или 2, в котором
величина коррекции устанавливается путем умножения величины продольной коррекции на предварительно определенный положительный коэффициент.
4. Способ коррекции собственного местоположения по любому из пп. 1-3, в котором
величина продольной коррекции добавляется к значению продольной координаты транспортного средства, если величина продольной коррекции равна или меньше предварительно определенного порогового значения.
5. Способ коррекции собственного местоположения по любому из пп. 1-4, дополнительно содержащий:
использование координаты оси, параллельной направлению ширины транспортного средства, в качестве поперечной координаты,
установку значения поперечной координаты местоположения целевого объекта, зарегистрированного в данных карты, в качестве второго зарегистрированного значения,
установку значения поперечной координаты местоположения целевого объекта, обнаруженного блоком обнаружения, в качестве второго наблюдаемого значения,
добавление величины поперечной коррекции к значению поперечной координаты транспортного средства, при этом величина поперечной коррекции получается путем вычитания второго наблюдаемого значения из второго зарегистрированного значения.
6. Устройство коррекции собственного местоположения для коррекции местоположения транспортного средства на данных карты, которое оценивается путем последовательного интегрирования величины перемещения транспортного средства, при этом устройство коррекции собственного местоположения содержит:
блок обнаружения, выполненный с возможностью обнаружения целевого объекта поблизости от транспортного средства, и
контроллер, получающий данные карты от устройства получения карты, текущую скорость транспортного средства от датчика скорости транспортного средства, а также величину рысканья от датчика инерциальных измерений, и выполненный с возможностью:
использовать координату оси, параллельной направлению вперед-назад транспортного средства, в качестве продольной координаты,
устанавливать значение продольной координаты местоположения целевого объекта, зарегистрированного в данных карты, в качестве первого зарегистрированного значения,
устанавливать значение продольной координаты местоположения целевого объекта, обнаруженного блоком обнаружения, в качестве первого наблюдаемого значения,
устанавливать величину коррекции на основе величины продольной коррекции, полученной вычитанием первого наблюдаемого значения из первого зарегистрированного значения,
вычислять скорректированную скорость транспортного средства путем добавления величины коррекции к скорости транспортного средства для транспортного средства,
вычислять величину перемещения транспортного средства на основе скорректированной скорости транспортного средства и скорости рыскания транспортного средства, и
оценивать местоположение транспортного средства путем последовательного интегрирования количества перемещения.
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2566175C1 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ ПОЛОСЫ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2572939C9 |
| US 9103671 B1, 11.08.2015 | |||
| US 20090030605 A1, 29.01.2009. | |||

