Изобретение относится к области автотранспортных средств и, в частности, к мониторингу окружающей среды транспортного средства, когда транспортное средство припарковано, а его двигатель выключен.
Изобретение касается способа мониторинга окружающей среды припаркованного автотранспортного средства. Изобретение касается также компьютерной программы и соответствующего считываемого носителя информации.
В области обеспечения вождения, как известно, на автотранспортных средствах устанавливают синхронные камеры. Как правило, синхронная камера работает на уровне серого, и ее работа основана на регулярной съемке фотографий в соответствии с заданной частотностью.
Эти синхронные камеры являются активными в фазе движения транспортного средства, но, как правило, отключены, когда транспортное средство припарковано. Их нельзя оставлять включенными в течение нескольких дней, когда транспортное средство находится на стоянке, так как они потребляют слишком много электрической энергии, поэтому батарея транспортного средства может очень быстро разрядиться, и пользователь не сможет завести транспортное средство. Таким образом, в настоящее время транспортное средство не может самостоятельно отслеживать свою окружающую среду, когда транспортное средство находится на стоянке в течение нескольких дней.
Задачей изобретения является решение этой проблемы посредством использования асинхронной камеры, которую, как известно, используют в первую очередь в области медицины, а также в промышленных приложениях, требующих сверхбыстрого обнаружения движения.
Асинхронная камера является динамичной камерой, оптический датчик которой образован матрицей независимых друг от друга пикселей. Движение в поле зрения асинхронной камеры приводит к изменению интенсивности на соответствующем пикселе или соответствующих пикселях. Потребление энергии камерой зависит от числа пикселей, интенсивность которых варьирует. Таким образом, асинхронная камера характеризуется очень низким потреблением энергии в статичной окружающей среде.
Изобретение использует это свойство низкого потребления асинхронной камеры, чтобы применять ее для мониторинга окружающей среды припаркованного автотранспортного средства.
Объектом изобретения является способ мониторинга окружающей среды припаркованного автотранспортного средства, при этом транспортное средство содержит двигатель, вычислительное устройство и систему мониторинга, содержащую асинхронную камеру, при этом способ мониторинга содержит следующие этапы:
- этап обнаружения припаркованного автотранспортного средства, на котором система мониторинга обнаруживает, что транспортное средство припарковано, при этом его двигатель выключен,
- этап обнаружения движения, на котором система мониторинга обнаруживает, является ли объект подвижным в окружающей среде транспортного средства, посредством обнаружения движения при помощи асинхронной камеры,
- этап пробуждения вычислительного устройства, на котором система мониторинга пробуждает указанное вычислительное устройство.
Согласно аспекту изобретения, способ мониторинга дополнительно содержит этап подачи тревожного сигнала, на котором система мониторинга передает тревожный сигнал в электронный прибор через беспроводную связь.
Согласно аспекту изобретения, вычислительное устройство выбирают из группы, в которую входят:
- вычислительное устройство освещения транспортного средства,
- вычислительное устройство звукового сигнального прибора,
- вычислительное устройство открывания транспортного средства,
- вычислительное устройство тревожной сигнализации транспортного средства,
- вычислительное устройство обнаружения препятствия,
- вычислительное устройство видеозаписи,
- вычислительное устройство предупреждения об опасности,
- вычислительное устройство геолокализации транспортного средства,
- вычислительное устройство торможения.
Согласно аспекту изобретения, транспортное средство связано с идентификационной карточкой, при этом способ мониторинга дополнительно содержит этап обнаружения идентификационной карточки, при этом указанное вычислительное устройство является вычислительным устройством открывания транспортного средства.
Согласно аспекту изобретения, способ мониторинга дополнительно содержит этап распознавания движения подвижного объекта среди заранее определенных движений.
Согласно аспекту изобретения, способ мониторинга дополнительно содержит этап обнаружения сигнала запроса ночного освещения, при этом вычислительное устройство является вычислительным устройством освещения транспортного средства.
Согласно аспекту изобретения, способ мониторинга дополнительно содержит этап обнаружения запроса открывания двери, при этом вычислительное устройство является вычислительным устройством предупреждения об опасности.
Согласно аспекту изобретения, автотранспортное средство припарковано на поверхности парковки, образующей по существу плоскость парковки, при этом оптика асинхронной камеры ориентирована в направлении плоскости парковки.
Согласно аспекту изобретения, способ мониторинга дополнительно содержит этап перевода вычислительного устройства в режим ожидания, на котором система мониторинга переводит указанное вычислительное устройство в режим ожидания после истечения заранее определенного времени пробуждения указанного вычислительного устройства или заранее определенного времени отсутствия обнаружения подвижного объекта в окружающей среде транспортного средства.
Согласно аспекту изобретения, система мониторинга дополнительно содержит синхронную камеру, при этом этап обнаружения движения содержит следующие операции:
- операцию обнаружения движения, во время которой асинхронная камера обнаруживает движение в окружающей среде транспортного средства,
- операцию активации синхронной камеры,
- операцию определения, во время которой система мониторинга определяет, является ли подвижным релевантный объект в окружающей среде транспортного средства в зависимости от данных съемки синхронной камеры и асинхронной камеры.
Объектом изобретения является также компьютерный программный продукт, содержащий программные команды для осуществления по меньшей мере одного этапа способа мониторинга, когда программные команды исполняет компьютер.
Объектом изобретения является также считываемый носитель информации, на котором записан компьютерный программный продукт.
Другие преимущества и отличительные признаки будут более очевидны из нижеследующего описания вариантов выполнения, представленных исключительно в качестве примеров со ссылками на прилагаемые чертежи, на которых:
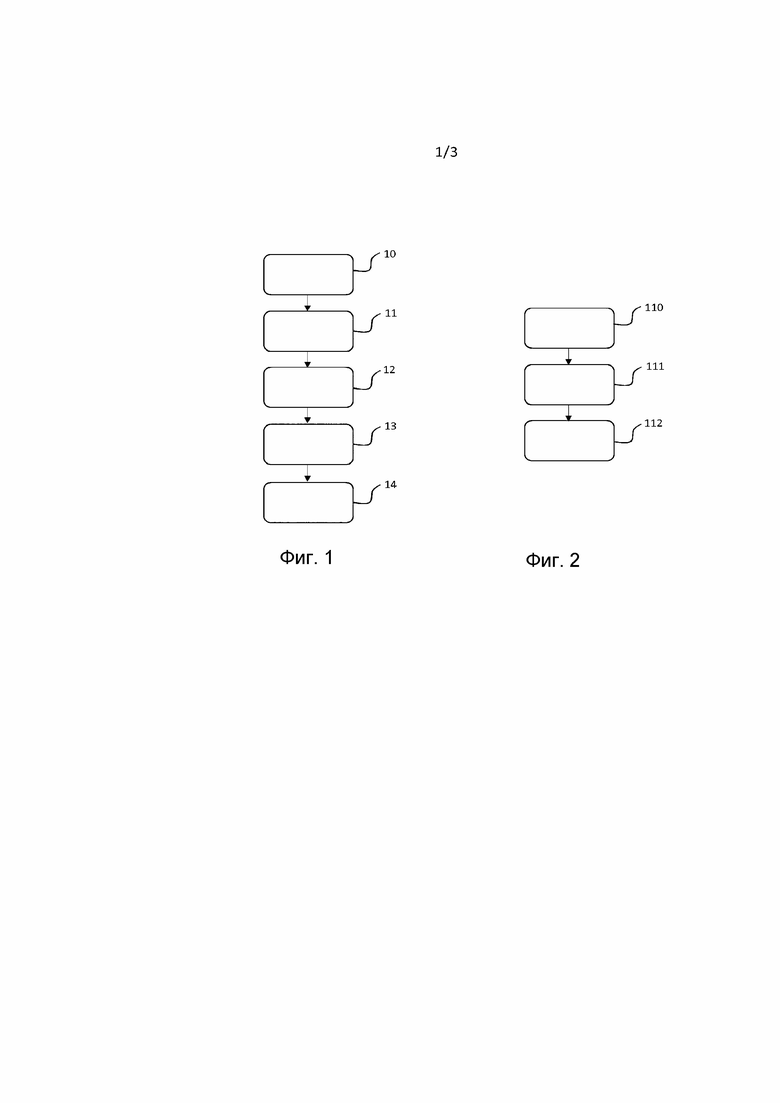
Фиг. 1 - схема заявленного способа мониторинга.
Фиг. 2 - схема операций одного из этапов заявленного способа мониторинга в измененном варианте выполнения.
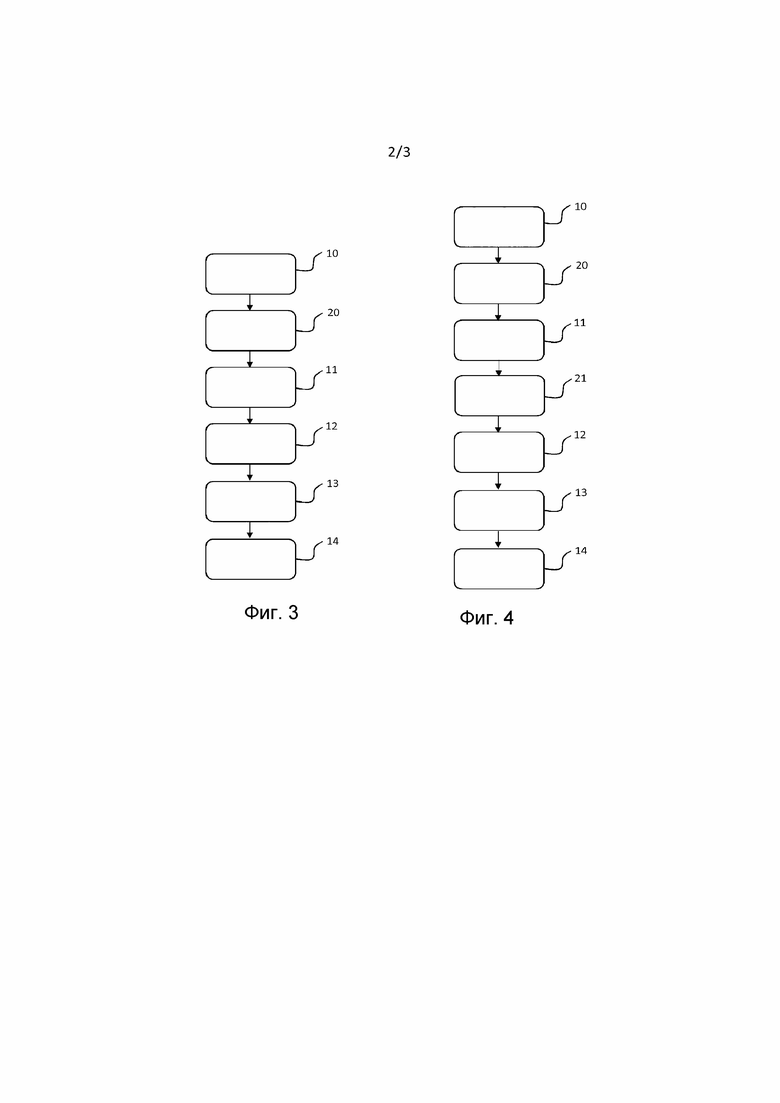
Фиг. 3 - схема этапов способа мониторинга в случае применения для блокировки или разблокировки, открывания или закрывания открывания.
Фиг. 4 - схема этапов способа мониторинга, показанного на фиг. 3, в базовом варианте выполнения.
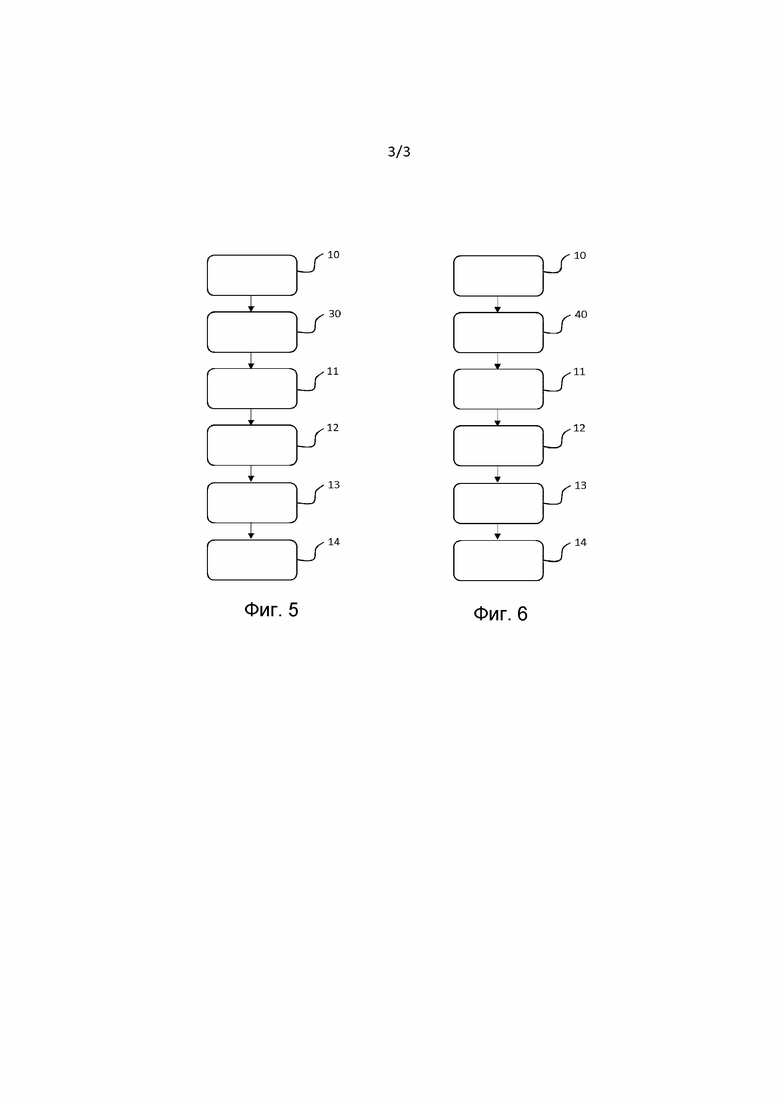
Фиг. 5 - схема этапов способа мониторинга в случае применения для сигнализации транспортного средства ночью.
Фиг. 6 - схема этапов способа мониторинга в случае применения для выхода из защищенного транспортного средства.
Изобретение относится к мониторингу окружающей среды моторизованного транспортного средства, как правило, автотранспортного средства, когда транспортное средство припарковано, и его двигатель выключен, в частности, относится к способу мониторинга.
Находящееся на стоянке транспортное средство является припаркованным, например, на общественном или частном стояночном месте, на улице, в гараже частного владения, на общественном паркинге, на обочине дороги, вдоль тротуара или полностью или частично на тротуаре. Транспортное средство, стоящее на красном светофоре, перед знаком «стоп» или на перегруженной дороге не является припаркованным транспортным средством в рамках изобретения, даже если его двигатель выключен. В этом случае транспортное средство не считается припаркованным.
Окружающая среда транспортного средства, как она определена в рамках изобретения, включает в себя внутреннюю окружающую среду автотранспортного средства, то есть кабину транспортного средства и грузовое пространство транспортного средства, и внешнюю окружающую среду транспортного средства. Внешняя окружающая среда транспортного средства включает в себя поверхность, на которой стоит транспортное средство, человека, подвижное транспортное средство, животное.
В дальнейшем тексте описания припаркованное транспортное средство, содержащее устройство мониторинга, будет называться: транспортное средство или заявленное транспортное средство.
Транспортное средство, отличное от заявленного транспортного средства и являющееся подвижным объектом в рамках изобретения, называется: подвижное транспортное средство.
Окружающая среда транспортного средства соответствует полю зрения асинхронной камеры примерно в 100 метров.
Область мониторинга, относящаяся к изобретению, включает в себя:
- защиту транспортного средства от вандализма, от кражи снаружи транспортного средства или внутри транспортного средства, при этом внутреннее пространство транспортного средства содержит кабину и грузовое пространство транспортного средства.
- защиту транспортного средства от ударов и аварий;
- защиту пешеходов и подвижных транспортных средств от ударов и аварий,
- помощь водителю или пассажиру, включающую в себя управление открывающимися частями транспортного средства,
- помощь водителю или пассажиру с целью освещения окружающей среды транспортного средства,
- сигнализацию освещения транспортного средства ночью,
- подачу тревожного сигнала владельцу, сбор улик.
Возможными областями применения способа мониторинга являются:
- кража внутри транспортного средства,
- превентивная защита кузова транспортного средства,
- видеоконтроль,
- угон транспортного средства,
- блокировка и разблокировка замков открывания,
- открывание и закрывание моторизованных открывания,
- предупреждение перемещения транспортного средства,
- предупреждения скольжения транспортного средства,
- сигнализация транспортного средства ночью,
- выход из защищенного транспортного средства,
- освещение внешней окружающей среды транспортного средства ночью.
Транспортное средство содержит двигатель, вычислительное устройство и систему мониторинга, содержащую асинхронную камеру.
Как показано на фиг. 1, способ мониторинга содержит следующие этапы:
- этап 10 обнаружения припаркованного транспортного средства, на котором система мониторинга обнаруживает, что транспортное средство припарковано, при этом его двигатель выключен,
- этап 11 обнаружения движения, на котором система мониторинга обнаруживает, является ли объект подвижным в окружающей среде транспортного средства, посредством обнаружения движения при помощи асинхронной камеры,
- этап 12 пробуждения вычислительного устройства, на котором система мониторинга пробуждает указанное вычислительное устройство,
- этап 13 подачи тревожного сигнала, на котором система мониторинга передает тревожный сигнал в электронный прибор через беспроводную связь,
- этап 14 перевода вычислительного устройства в режим ожидания, на котором система мониторинга переводит указанное вычислительное устройство в режим ожидания после истечения заранее определенного времени пробуждения указанного вычислительного устройства или заранее определенного времени отсутствия обнаружения подвижного объекта в окружающей среде транспортного средства.
На этапе 10 обнаружения припаркованного транспортного средства система мониторинга обнаруживает, что транспортное средство припарковано и его двигатель выключен.
Обнаружение припаркованного транспортного средства с выключенным двигателем можно, например, производить посредством наблюдения параметров транспортного средства: скорости колес, состояния двигателя, состояния открывания. Это наблюдение можно осуществлять при помощи органа наблюдения транспортного средства, который передает сигнал или более сигналов в систему мониторинга. При получении и возможном декодировании этого сигнала или этих сигналов система мониторинга обнаруживает, что транспортное средство припарковано и что двигатель транспортного средства выключен.
Сигналы, отображающие скорость колес, состояние двигателя или состояние открывания, могут быть получены на основании данных, передаваемых через сеть связи транспортного средства типа LIN, CAN или Ethernet.
Система мониторинга может содержать средства, выполненные с возможностью осуществлять это наблюдение параметров транспортного средства для обеспечения этого обнаружения припаркованного транспортного средства с выключенным двигателем.
После того, как система обнаружила, что транспортное средство припарковано и двигатель выключен, большинство органов транспортного средства находятся в режиме ожидания. Вычислительное устройство находится в режиме ожидания. Система мониторинга является активной. Асинхронная камера является активной. Если транспортное средство содержит другие камеры, они находятся в режиме ожидания.
На этапе 11 обнаружения движения система мониторинга обнаруживает, является ли объект подвижным в окружающей среде транспортного средства, посредством обнаружения движения при помощи асинхронной камеры, поле зрения которой охватывает окружающую среду транспортного средства.
Подвижный объект в рамках изобретения может представлять собой подвижное транспортное средство, животное, человека, жест человека, поверхность, на которой припарковано транспортное средство.
В первом варианте выполнения, называемом базовым вариантом выполнения, обнаружение движения осуществляют при помощи только асинхронной камеры, то есть без оптического прибора другого типа, например, синхронной камеры.
Асинхронная камера обнаруживает движение, когда один или более пикселей изображения меняют интенсивность.
Асинхронная камера может содержать электронную схему, в состав которой входит фильтр обработки изображений. Этот фильтр обработки позволяет, в частности, избегать ложных обнаружений движения в случае нерелевантного подвижного объекта или в случае объектов, перемещающихся на слишком высокой скорости, то есть не являющихся релевантными для рассматриваемого применения.
Во втором варианте выполнения, называемом измененным вариантом выполнения, система мониторинга дополнительно содержит синхронную камеру. Этот вариант показан на фиг. 2 и подробно описан ниже.
На этапе 12 пробуждения вычислительного устройства система мониторинга пробуждает указанное вычислительное устройство.
Вычислительное устройство, пробуждаемое на этапе 12 пробуждения вычислительного устройства, выбирают среди вычислительного устройства или комбинации вычислительных устройств из следующего списка:
- вычислительное устройство освещения транспортного средства,
- вычислительное устройство звукового сигнального прибора,
- вычислительное устройство открывания транспортного средства,
- вычислительное устройство тревожной сигнализации транспортного средства,
- вычислительное устройство обнаружения препятствия,
- вычислительное устройство видеозаписи,
- вычислительное устройство предупреждения об опасности,
- вычислительное устройство геолокализации транспортного средства,
- вычислительное устройство торможения.
Пробуждение вычислительного устройства освещения транспортного средства активирует одно или более осветительных устройств транспортного средства, таких как фары дальнего света, фары ближнего света, габаритные огни, стоп-сигналы, мигающие фонари или фонари внутреннего освещения транспортного средства.
Пробуждение вычислительного устройства звукового сигнального прибора активирует звуковой сигнальный прибор транспортного средства, слышимый снаружи транспортного средства, например, клаксон транспортного средства.
Пробуждение вычислительного устройства открывания транспортного средства активирует одну из следующих функций:
- блокировку и разблокировку замков открывания,
- открывание механических открывания, после чего операцию открывания производит упругая механическая система, например, пружина,
- открывание или закрывание моторизованных открывающихся частей транспортного средства.
Открывающиеся части транспортного средств включают в себя двери, капот, багажник, заднюю дверь, топливный лючок, лючок для зарядки электрического или гибридного транспортного средства, открывающаяся крыша транспортного средства, крыша кабриолета.
Пробуждение вычислительного устройства тревожной сигнализации транспортного средства активирует тревожную сигнализацию транспортного средства, что позволяет отпугнуть лицо, пытающееся угнать или повредить транспортное средство. Тревожная сигнализация транспортного средства может быть звуковой или световой. Тревожная сигнализация может быть объединена с передачей сообщения, например, текстового или видеосообщения на мобильный телефон, например, владельцу транспортного средства, обычному водителю транспортного средства или в охранную компанию.
Пробуждение вычислительного устройства обнаружения препятствий активирует датчики, используемые, в частности, для помощи во время парковки, в частности, ультразвуковые датчики. Активация датчиков может касаться, например, всех ультразвуковых датчиков, расположенных сзади или спереди транспортного средства или по бокам транспортного средства, в зависимости от места нахождения подвижного объекта в окружающей среде транспортного средства. Обнаружение препятствий может быть объединено с передачей звукового или светового сигнала.
Пробуждение вычислительного устройства видеозаписи активирует видеозапись, например, при помощи синхронной камеры.
Пробуждение вычислительного устройства предупреждения об опасности активирует передачу сигнала, которым может быть:
- световой сигнал, например, на приборной панели транспортного средства или на открывающейся части транспортного средства,
- звуковой сигнал, идентифицируемый пользователем транспортного средства как сигнал, предупреждающий о потенциальной опасности,
- тревожный сигнал, передаваемый в электронный прибор через беспроводную связь.
Пробуждение вычислительного устройства геолокализации транспортного средства активирует устройство геолокализации транспортного средства, позволяющее идентифицировать координаты транспортного средства, например, его широту и его долготу.
Пробуждение вычислительного устройства торможения активирует стояночный тормоз транспортного средства, позволяя затянуть или отпустить автоматический стояночный тормоз транспортного средства.
Этап 13 подачи тревожного сигнала является факультативным. Система мониторинга передает тревожный сигнал в электронный прибор через беспроводную связь. Например, система мониторинга передает текстовое сообщение или видеосообщение на мобильный телефон владельца транспортного средства или в охранную компанию. Могут передаваться также координаты, такие как широта и долгота транспортного средства.
На этапе 14 перевода вычислительного устройства в режим ожидания система мониторинга переводит указанное вычислительное устройство в режим ожидания после истечения заранее определенного времени пробуждения указанного вычислительного устройства или заранее определенного времени отсутствия обнаружения подвижного объекта в окружающей среде транспортного средства. Это позволяет избегать слишком быстрой разрядки батареи транспортного средства.
Предпочтительно способ мониторинга продолжается далее возвращением на этап 11 обнаружения движения.
Порядок последовательности этапов 10-14 предпочтительно является порядком, показанным на фиг. 1. Тем не менее, этап 13 подачи тревожного сигнала может осуществляться после этапа 11 обнаружения движения или после этапа 12 пробуждения вычислительного устройства, или одновременно с одним из указанных этапов 11, 12.
Как показано на фиг. 2, в измененном варианте выполнения этап 11 обнаружения движения содержит следующие операции:
- операцию 110 обнаружения движения, во время которой асинхронная камера обнаруживает движение в окружающей среде транспортного средства,
- операцию 111 активации синхронной камеры,
- операцию 112 определения, во время которой система мониторинга определяет, является ли подвижным релевантный объект в окружающей среде транспортного средства в зависимости от данных съемки синхронной камеры и асинхронной камеры.
Во время операции 110 обнаружения движения асинхронная камера обнаруживает движение в окружающей среде транспортного средства.
Асинхронная камера обнаруживает движение, когда один или более пикселей изображения, снимаемого асинхронной камерой, меняют интенсивность.
Затем во время операции 111 активации синхронной камеры асинхронная камера активирует синхронную камеру. Этот этап позволяет не оставлять активной синхронную камеру в течение всего времени стоянки транспортного средства, чтобы избегать разрядки батареи транспортного средства. Когда синхронная камера является активной, она снимает изображения или регистрирует данные на этих изображениях.
Наконец, во время операции 112 определения, в ходе которой система мониторинга компилирует и обрабатывает данные съемок синхронной и асинхронной камер, определяют, является ли релевантный объект подвижным в рамках изобретения. Если обнаружен релевантный подвижный объект, осуществляют этап 12 пробуждения вычислительного устройства.
Во время операции 112 определения система мониторинга может, в частности, определить:
- природу подвижного объекта, например, подвижное транспортное средство, животное, человека, жест человека, поверхность, на которой припарковано транспортное средство,
- движение подвижного объекта, например, среди заранее определенных движений,
- расстояние от подвижного объекта до транспортного средства.
В зависимости от природы подвижного объекта и/или от его движения, и/или от его скорости, и/или от его расстояния до транспортного средства система мониторинга определяет, является ли подвижный объект релевантным.
Критерии определения релевантного объекта могут меняться в зависимости от применения.
Заранее определенное движение соответствует направлению движения и/или ориентации направления, и/или скорости движения.
В некоторых вариантах применения оптика асинхронной камеры направлена внутрь транспортного средства, в частности, в кабину и/или грузовое пространство, чтобы контролировать кабину транспортного средства и/или грузовое пространство.
В некоторых вариантах применения оптика асинхронной камеры направлена в сторону внешней окружающей среды транспортного средства, то есть окружающей среды дороги или окружающей среды паркинга, гаража.
Асинхронная камера может находиться спереди транспортного средства или сзади транспортного средства. Она может быть встроена или нет сзади стекол.
Асинхронная камера может также находиться на боковых зеркалах заднего вида или на боковых открывающихся частях.
Асинхронная камера может также находиться одновременно в нескольких местах транспортного средства. В этом случае асинхронная камера соответствует системе из нескольких асинхронных оптических приборов, расположенных в разных местах транспортного средства.
В случае применения против кражи внутри транспортного средства подвижным объектом является человек, обнаруженный внутри кабины транспортного средства и/или внутри грузового пространства транспортного средства.
Оптика асинхронной камеры направлена внутрь транспортного средства, чтобы контролировать кабину транспортного средства и/или грузовое пространство.
Вычислительное устройство, пробуждаемое на этапе 12 пробуждения вычислительного устройства, является вычислительным устройством подачи тревожного сигнала транспортного средства, и/или вычислительным устройством видеозаписи, и/или вычислительным устройством геолокализации транспортного средства.
В случае применения для превентивной защиты кузова транспортного средства подвижный объект является подвижным транспортным средством, которое перемещается в окружающей среде заявленного транспортного средства, в частности, чтобы припарковаться вблизи заявленного транспортного средства.
Оптика асинхронной камеры направлена в сторону внешней окружающей среды, чтобы контролировать внешнюю окружающую среду транспортного средства. Асинхронная камера может соответствовать нескольким асинхронным оптическим приборам, расположенным в разных местах транспортного средства, например, одному прибору с оптикой, направленной вперед транспортного средства, и другому прибору с оптикой, направленной назад транспортного средства.
Вычислительное устройство, пробуждаемое на этапе 12 пробуждения вычислительного устройства, является вычислительным устройством освещения транспортного средства, и/или вычислительным устройством звукового сигнального прибора, и/или вычислительным устройством обнаружения препятствий.
Это позволяет водителю подвижного транспортного средства получить предупреждение в случае небольшого расстояния до транспортного средства, и/или иметь лучший обзор для осуществления своего маневра, и/или использовать измерение расстояния ультразвуковыми датчиками заявленного транспортного средства, чтобы оценить расстояние между заявленным транспортным средством и подвижным транспортным средством. Информация о расстоянии может быть передана на подвижное транспортное средство посредством повышения частоты мигания освещения, которое затем становится неподвижным при значении ниже определенного расстояния. Таким образом, подвижное транспортное средство использует измерение расстояния даже в случае, когда это транспортное средство не оснащено ультразвуковыми датчиками. Информация о расстоянии может быть передана на подвижное транспортное средство посредством включения габаритных огней. Таким образом, водитель подвижного транспортного средства использует освещение заявленного транспортного средства при осуществлении своего маневра.
В случае применения для видеоконтроля подвижный объект может быть объектом любой природы.
Оптика асинхронной камеры направлена в сторону внешней окружающей среды транспортного средства, чтобы контролировать внешнюю окружающую среду транспортного средства.
Вычислительное устройство, пробуждаемое на этапе 12 пробуждения вычислительного устройства, является вычислительным устройством видеозаписи.
В случае применения против угона транспортного средства подвижным объектом является поверхность, на которой припарковано транспортное средство. Действительно, в системе координат транспортного средства и, следовательно, системы мониторинга перемещение транспортного средства посредством его подъема или буксировки соответствует обнаружению движения поверхности земли.
Автотранспортное средство стоит на поверхности парковки, по существу образующей плоскость парковки. Предпочтительно оптика асинхронной камеры ориентирована в направлении плоскости парковки и в сторону наружного пространства транспортного средства.
Во время своего перемещения транспортное средство по-прежнему считается припаркованным в рамках изобретения. В данном случае перемещается поверхность его парковки. Движение между транспортным средством и поверхностью земли является относительным движением.
Вычислительное устройство, пробуждаемое на этапе 12 пробуждения вычислительного устройства, является вычислительным устройством видеозаписи, и/или вычислительным устройством геолокализации, и/или вычислительным устройством тревожной сигнализации транспортного средства.
В случае применения для блокировки и разблокировки замков открывания, механического открывания открывания, моторизованного открывания и закрывания открывания транспортное средство связано с идентификационной карточкой, и способ мониторинга дополнительно содержит этап 20 обнаружения идентификационной карточки, как показано на фиг. 3.
Этап 20 обнаружения идентификационной карточки соответствует, например, получению системой мониторинга информации, передаваемой через сеть связи типа LIN, CAN или Ethernet.
Оптика асинхронной камеры направлена в сторону внешней окружающей среды транспортного средства.
Подвижным объектом является, например, рука человека, находящаяся вблизи открывающейся части транспортного средства, при этом человек имеет при себе идентификационную карточку, связанную с транспортным средством.
Подвижным объектом может быть жест человека.
В измененном варианте выполнения распознавание жеста человека может происходить во время операции 112 определения этапа 11 обнаружения движения, как показано на фиг. 3 в комбинации с фиг. 2.
В базовом варианте выполнения способ мониторинга дополнительно содержит этап 21 распознавания движения подвижного объекта среди заранее определенных движений, как показано на фиг. 4.
Заранее определенное движение соответствует направлению движения и/или ориентации движения, и/или скорости движения.
Вычислительное устройство, пробуждаемое на этапе 12 пробуждения вычислительного устройства, является вычислительным устройством открывания транспортного средства.
В применении для блокировки и разблокировки замков открывания пробуждение вычислительного устройства активирует блокировку или разблокировку одной или нескольких открывания транспортного средства.
В применении для механического открывания открывания пробуждение вычислительного устройства активирует открывание одной или нескольких открывания транспортного средства.
В применении для моторизованного открывания и закрывания открывания пробуждение вычислительного устройства активирует открывание или закрывание одной или нескольких моторизованных открывания транспортного средства.
Открывающиеся части транспортного средства представляют собой двери, капот, багажник, заднюю дверь, топливный лючок, лючок зарядки электрического или гибридного транспортного средства, открывающуюся крышу транспортного средства, крышу кабриолета.
В случае применения для предупреждения перемещения транспортного средства подвижным предметом является поверхность, на которой стоит транспортное средство. Действительно, в системе координат транспортного средства и, следовательно, системы мониторинга перемещение транспортного средства соответствует обнаружению движения поверхности земли, например, по причине слабо затянутого стояночного тормоза или в случае подвижного транспортного средства, толкающего припаркованное транспортное средство.
Автотранспортное средство припарковано на поверхности парковки, по существу образующей плоскость парковки. Предпочтительно оптика асинхронной камеры ориентирована в направлении плоскости парковки и в сторону наружного пространства транспортного средства.
Во время своего перемещения транспортное средство по-прежнему считается припаркованным в рамках изобретения. В данном случае перемещается поверхность его парковки.
Вычислительное устройство, пробуждаемое на этапе 12 пробуждения вычислительного устройства, является вычислительным устройством торможения.
Этот вариант применения отличается, например, от применения против угона транспортного средства тем, что в контакт с транспортным средством не входит никакой другой подвижный объект, в частности, человек или стрела для подъема транспортного средства.
В случае применения для предупреждения скольжения подвижным предметом является поверхность, на которой стоит транспортное средство. Действительно, в системе координат транспортного средства и, следовательно, системы мониторинга перемещение транспортного средства, например, по причине одновременного скольжения четырех колес на ледяном покрове, соответствует обнаружению движения поверхности земли.
Автотранспортное средство припарковано на поверхности стоянки, по существу образующей плоскость парковки. Предпочтительно оптика асинхронной камеры ориентирована в направлении плоскости парковки и направлена наружу транспортного средства.
Во время своего перемещения транспортное средство по-прежнему считается припаркованным в рамках изобретения. В данном случае перемещается поверхность его парковки.
Вычислительное устройство, пробуждаемое на этапе 12 пробуждения вычислительного устройства, является вычислительным устройством предупреждения об опасности.
Этот вариант применения отличается, например, от применения против угона транспортного средства тем, что в контакт с транспортным средством не входит никакой другой подвижный объект, в частности, человек или стрела для подъема транспортного средства.
В случае применения для сигнализации транспортного средства ночью способ мониторинга дополнительно содержит этап 30 обнаружения сигнала запроса ночного освещения, как показано на фиг. 5.
На этапе 30 обнаружения сигнала запроса ночного освещения система мониторинга обнаруживает запрос ночного освещения со стороны пользователя транспортного средства, например, при активации механического или электронного привода.
Оптика асинхронной камеры направлена в сторону внешней окружающей среды транспортного средства.
Подвижным объектом является, например, подвижное транспортное средство, движущееся по дороге, на которой или рядом с которой припарковано заявленное транспортное средство.
Вычислительное устройство, пробуждаемое на этапе 12 пробуждения вычислительного устройства, является вычислительным устройством освещения транспортного средства.
Таким образом, заявленное транспортное средство, припаркованное рядом с проселочной дорогой, активирует, например, свои габаритные огни, расположенные со стороны дороги, при обнаружении приближения подвижного транспортного средства, движущегося по дороге, смежной с поверхностью его парковки. Заявленное транспортное средство указывает на свое присутствие только, когда в этом возникает необходимость.
В случае применения для выхода защищенного транспортного средства способ мониторинга дополнительно содержит этап 40 обнаружения запроса открывания открывающейся части, как показано на фиг. 6.
Во время этапа 40 обнаружения запроса открывания открывающейся части система мониторинга обнаруживает, что человек, находящийся в кабине транспортного средства, запрашивает открывание открывающейся части, например, через положение своей руки на соответствующей ручке указанной открывающейся части, через нажатие на кнопку управления, через приведение в действие ручки указанной открывающейся части, через жест, опознаваемый системой мониторинга как запрос открывания открывающейся части.
Оптика асинхронной камеры направлена в сторону внешней окружающей среды транспортного средства.
Вычислительное устройство, пробуждаемое на этапе 12 пробуждения вычислительного устройства, является вычислительным устройством предупреждения об опасности.
Например, водитель, припарковавший свой автомобиль и готовящийся выйти из него, получает предупреждение о риске столкновения с подвижным транспортным средством, или с велосипедистом, или с пешеходом, если он откроет свою дверь.
В случае применения для освещения внешней окружающей среды транспортного средства ночью подвижным объектом является человек.
Оптика асинхронной камеры направлена в сторону внешней окружающей среды транспортного средства.
Подвижным объектом является, например, водитель, перемещающийся перед припаркованным заявленным транспортным средством.
Вычислительное устройство, пробуждаемое на этапе 12 пробуждения вычислительного устройства, является вычислительным устройством освещения транспортного средства.
Так, припаркованное заявленное транспортное средство активирует, например, свои фары ближнего света при обнаружении удаления или приближения водителя.
При всех применениях, в частности, вышеперечисленных применениях, в базовом варианте выполнения система мониторинга может пробудить вычислительное устройство без предварительного распознавания природы движущегося объекта, При этом достаточно лишь обнаружения подвижного объекта в окружающей среде транспортного средства.
При всех применениях, в частности, вышеперечисленных применениях, пробуждение вычислительного устройства можно производить при условии распознавания релевантного подвижного объекта, в частности, распознавания типа объекта при помощи синхронной камеры или асинхронной камеры. Это соответствует измененному варианту выполнения.
Можно также использовать фильтр обработки изображений. Например, в случае применения для блокировки и разблокировки открывания, механического открывания открывания, моторизованного открывания и закрывания открывания подвижный объект на расстоянии более одного метра от асинхронной камеры не будет считаться релевантным для пробуждения вычислительного устройства открывания транспортного средства. Следовательно, указанный объект не будет считаться подвижным объектом или релевантным подвижным объектом в рамках изобретения.
При всех применениях, в частности, вышеперечисленных применениях, способ мониторинга может дополнительно содержать этап 13 подачи тревожного сигнала, на котором система мониторинга передает тревожный сигнал в электронный прибор через беспроводную связь, например, текстовое сообщение или видеосообщение на мобильный телефон владельца транспортного средства, водителя транспортного средства, пассажира транспортного средства или в охранную компанию. После получения этого тревожного сигнала могут последовать другие действия, такие как визуальное наблюдение сцены и/или запись сцены.
Система мониторинга может содержать компьютерный программный продукт, содержащий программные команды для осуществления одного или нескольких способов мониторинга при любом применении.
Система мониторинга может содержать несколько компьютерных программных продуктов, каждый из которых содержит программные команды для осуществления одного или нескольких способов мониторинга с целью реализации по меньшей мере одного применения.
Транспортное средство может содержать несколько систем мониторинга и несколько вычислительных устройств в рамках изобретения.
Вычислительное устройство связано с системой мониторинга через систему связи, например, сеть связи транспортного средства типа LIN, CAN или Ethernet.
Система мониторинга выполнена с возможностью принимать, обрабатывать и передавать сигналы связи в вычислительное устройство.
Асинхронная камера может содержать электронный модуль, позволяющий обрабатывать данные, касающиеся обнаружения подвижного объекта, такие как распознавание движения подвижного объекта, обнаружение движения подвижного объекта, определение релевантности подвижного объекта. Электронный модуль может быть вынесен на электронную плату, не встроенную в асинхронную камеру. В этом случае система мониторинга содержит по меньшей мере одну синхронную камеру и электронный модуль.
Когда система мониторинга содержит синхронную камеру, синхронная камера и асинхронная камера могут быть подсоединены напрямую через сеть связи или через отдельный электронный модуль. Отдельный электронный модуль позволяет обрабатывать данные, касающиеся обнаружения подвижного объекта, такие как распознавание движения подвижного объекта, обнаружение движения подвижного объекта, определение релевантности подвижного объекта.
Система связи может быть проводной и/или напечатанной на печатной схеме.
Вычислительное устройство в режиме ожидания является вычислительным устройством с минимальным потреблением электроэнергии. Вычислительное устройство не может активировать свои основные функции, но может обнаружить сигнал пробуждения, обеспечивающий его пробуждение.
Пробужденное вычислительное устройство может активировать свои основные функции, например, включить габаритные огни в случае вычислительного устройства освещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ВАКАНТНЫХ ПАРКОВОЧНЫХ МЕСТАХ, КАК КОММЕРЧЕСКИХ, ТАК И ОБЩЕДОСТУПНЫХ | 2019 |
|
RU2751474C2 |
| СИСТЕМА СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ ДЛЯ ЦЕНТРАЛИЗОВАННОЙ ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2005 |
|
RU2269437C1 |
| СПОСОБ ПОСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА НА СТОЯНКУ И СИСТЕМА ДЛЯ ЕГО ВЫПОЛНЕНИЯ | 2014 |
|
RU2638587C2 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2003 |
|
RU2265531C2 |
| СПОСОБ ОЦЕНКИ УЧАСТКА ДЛЯ ПАРКОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2670845C9 |
| СПОСОБ И УСТРОЙСТВО ПОМОЩИ ПРИ ВЫЕЗДЕ | 2016 |
|
RU2726885C1 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ МЕСТ ДЛЯ ПАРКОВКИ | 2015 |
|
RU2700635C1 |
| СИСТЕМА ДЛЯ ИНДУКТИВНОЙ ЗАРЯДКИ ТРАНСПОРТНЫХ СРЕДСТВ, СНАБЖЕННЫХ ЭЛЕКТРОННОЙ СИСТЕМОЙ ПОЗИЦИОНИРОВАНИЯ | 2010 |
|
RU2506181C2 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2574383C2 |
| СПОСОБ ОПОВЕЩЕНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2668350C9 |
Изобретение относится к области автотранспортных средств и к мониторингу окружающей среды транспортного средства. Предлагается способ мониторинга окружающей среды припаркованного автотранспортного средства, при этом транспортное средство содержит двигатель, вычислительное устройство и систему мониторинга, содержащую асинхронную камеру. Способ содержит следующие этапы: этап обнаружения припаркованного автотранспортного средства, на котором обнаруживают, с помощью системы мониторинга, что транспортное средство припарковано, а двигатель выключен, этап обнаружения движения, на котором обнаруживают, с помощь системы мониторинга, является ли объект подвижным в окружающей среде транспортного средства, посредством обнаружения движения при помощи асинхронной камеры, этап пробуждения вычислительного устройства, на котором пробуждают, с помощью системы мониторинга, указанное вычислительное устройство. Достигается своевременное отслеживание окружающей среды, когда транспортное средство находится на стоянке в течение нескольких дней. 2 н. и 7 з.п. ф-лы, 6 ил.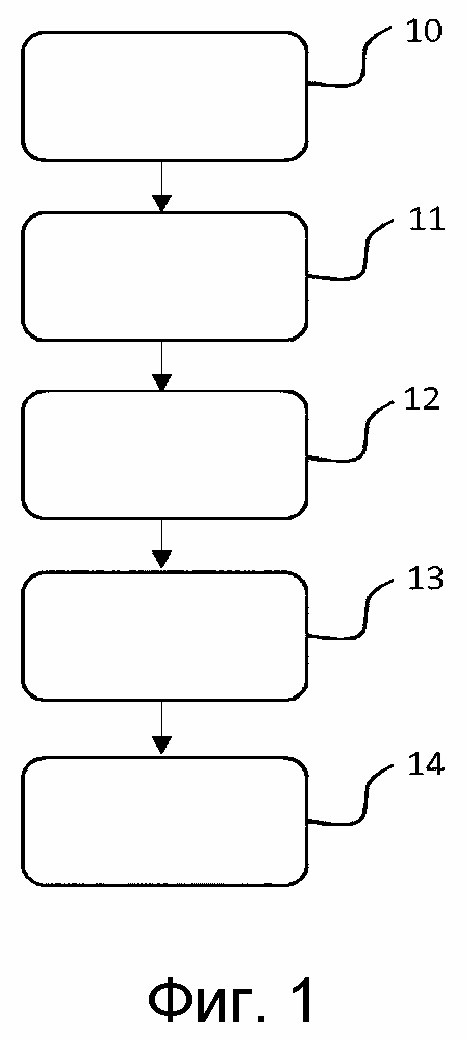
1. Способ мониторинга окружающей среды припаркованного автотранспортного средства, при этом транспортное средство содержит двигатель, вычислительное устройство и систему мониторинга, содержащую асинхронную камеру, содержащий следующие этапы:
- этап (10) обнаружения припаркованного автотранспортного средства, на котором обнаруживают, с помощью системы мониторинга, что транспортное средство припарковано, а двигатель выключен,
- этап (11) обнаружения движения, на котором обнаруживают, с помощь системы мониторинга, является ли объект подвижным в окружающей среде транспортного средства, посредством обнаружения движения при помощи асинхронной камеры,
- этап (12) пробуждения вычислительного устройства, на котором пробуждают, с помощью системы мониторинга, указанное вычислительное устройство.
2. Способ мониторинга по п. 1, дополнительно содержащий этап (13) подачи тревожного сигнала, на котором передают, с помощью системы мониторинга, тревожный сигнал на электронный прибор посредством беспроводной связи.
3. Способ мониторинга по п. 1 или 2, в котором вычислительное устройство выбирают из группы, в которую входят:
- вычислительное устройство освещения транспортного средства,
- вычислительное устройство звукового сигнального прибора,
- вычислительное устройство открывания транспортного средства,
- вычислительное устройство тревожной сигнализации транспортного средства,
- вычислительное устройство обнаружения препятствия,
- вычислительное устройство видеозаписи,
- вычислительное устройство предупреждения об опасности,
- вычислительное устройство геолокализации транспортного средства,
- вычислительное устройство торможения.
4. Способ мониторинга по любому из пп. 1-3, в котором транспортное средство ассоциировано с идентификационной карточкой, при этом способ мониторинга дополнительно содержит этап (20) обнаружения идентификационной карточки, при этом указанное вычислительное устройство является вычислительным устройством открывания транспортного средства.
5. Способ мониторинга по п. 4, дополнительно содержащий этап (21) распознавания движения подвижного объекта из заданных движений.
6. Способ мониторинга по любому из пп. 1-5, в котором автотранспортное средство припарковано на поверхности парковки, образующей по существу плоскость парковки, при этом оптика асинхронной камеры ориентирована в направлении плоскости парковки.
7. Способ мониторинга по любому из пп. 1-6, дополнительно содержащий этап (14) перевода вычислительного устройства в режим ожидания, на котором переводят, с помощью системы мониторинга, указанное вычислительное устройство в режим ожидания после истечения заданного времени с пробуждения указанного вычислительного устройства или заданного времени отсутствия обнаружения подвижного объекта в окружающей среде транспортного средства.
8. Способ мониторинга по любому из пп. 1-7, в котором система мониторинга дополнительно содержит синхронную камеру, при этом этап (11) обнаружения движения содержит следующие подэтапы:
- подэтап (110) обнаружения движения, на котором обнаруживают, с помощью асинхронной камеры, движение в окружающей среде транспортного средства,
- подэтап (111) активации синхронной камеры,
- подэтап (112) определения, на котором определяют, с помощью системы мониторинга, является ли подвижным релевантный объект в окружающей среде транспортного средства в зависимости от данных съемки синхронной камеры и асинхронной камеры.
9. Считываемый носитель информации, хранящий компьютерный программный продукт, содержащий программные команды, вызывающие, при исполнении компьютером, выполнение способа мониторинга по любому из пп. 1-8.
| US 8705799 B2, 22.04.2014 | |||
| JP 2005039705 A, 10.02.2005 | |||
| WO 2017105913 A1, 22.06.2017 | |||
| УПРАВЛЕНИЕ ИСПОЛЬЗОВАНИЕМ ОДНОГО ПАРКОВОЧНОГО ПРОСТРАНСТВА ДЛЯ НЕСКОЛЬКИХ ТРАНСПОРТНЫХ СРЕДСТВ ПОСРЕДСТВОМ ПРИМЕНЕНИЯ МНОЖЕСТВА КАМЕР | 2013 |
|
RU2607043C1 |

