Настоящее изобретение относится к устройству управления для рабочей машины с по меньшей мере одной стрелой, при этом устройство управления выполнено с возможностью формирования управляющих сигналов для приведения в действие рабочей машины в зависимости от положения по меньшей мере одного сустава кисти руки оператора, и при этом устройство управления содержит по меньшей мере один блок управления.
В строительных машинах или рабочих машинах, таких как, например, гидравлические экскаваторы, известно согласно уровню техники управление ими из водительской кабины, предусмотренной на них. Традиционное управление рабочим оборудованием рабочей машины обычно осуществляется через устройства ручного управления, которые приводят в действие управляющие клапаны посредством гидравлических и/или электрических сигналов для того, чтобы управлять подачей масла к гидравлическим цилиндрам. Оно также применяется для поворотных перемещений верхней рамы рабочей машины. Устройства ручного управления, как правило, могут быть установлены в поддерживающей консоли в водительской кабине слева и справа от водительского сиденья. В контексте настоящего изобретения ссылка выполняется на рабочие машины, которые в смысле изобретения содержат строительные машины, а также дополнительные машины, такие как машины для подачи материалов или любые другие погрузочно-разгрузочные машины.
В управлении объем масла пропускается в соответствующие гидравлические цилиндры рабочей машины согласно путям, охватываемым устройствами ручного управления или согласно отклонению соответствующих рычагов устройств ручного управления.
Отдельные частичные перемещения рабочего оборудования или рабочей машины должны регулироваться оператором машины посредством целевого отклонения рычагов управления для того, чтобы добиваться равномерного рабочего перемещения рабочего инструмента. Интуитивное управление рабочей машиной не является легко возможным.
Из уровня техники, кроме того также известны блоки управления, отдаленные от машины, или блоки дистанционного управления, посредством которых функция вышеописанного традиционного управления может быть передана рабочей машине по радиосигналу и, таким образом, может быть применена или выполнена на внешнем блоке управления. Хорошо известно, что такие блоки дистанционного радиоуправления конфигурируются как "подвесы на шею", которые оператор машины может носить вокруг своей шеи, и/или которые оператор машины держит перед своим телом для управления машиной.
В управлении, известном из уровня техники, недостатком является то, что сложный рабочий цикл рабочей машины требует немалого опыта оператора машины при управлении функциями рабочей машины или функциями экскаватора посредством двух устройств ручного управления. Это, в свою очередь, приводит в результате к относительно длительному времени обучения оператора машины.
На этом фоне целью изобретения является предоставление улучшенного устройства управления для управления рабочей машиной. С помощью устройства управления согласно изобретению станет возможно также предоставлять возможность необученным операторам машин, после коротких фаз обучения, безопасно управлять рабочей машиной. Соответственно, согласно изобретению может быть достигнуто значительное сокращение времени обучения оператора машины.
Согласно изобретению, данная проблема решается посредством устройства управления с признаками по пункту 1 формулы изобретения. Преимущественные аспекты являются объектом зависимых пунктов.
Соответственно, предоставляется устройство управления для рабочей машины с по меньшей мере одной стрелой, при этом устройство управления выполнено с возможностью формирования управляющих сигналов для приведения в действие рабочей машины в зависимости от положения по меньшей мере одного сустава по меньшей мере одной кисти руки оператора, при этом рабочее устройство содержит по меньшей мере один блок управления.
То, что может иметься в виду под положением по меньшей мере одного сустава кисти руки, например, может быть по меньшей мере одним угловым положением произвольного сустава кисти руки человека, такого как, например, сустав пальца или запястье.
Согласно изобретению предусматривается, что блок управления оснащается, чтобы обнаруживать положение запястья по меньшей мере одного пястно-фалангового сустава по меньшей мере одного проксимального межфалангового сустава по меньшей мере одного дистального межфалангового сустава, седловидного сустава большого пальца, сустава основания большого пальца и/или крайнего сустава большого пальца по меньшей мере одной кисти руки. Под положением соответствующего сустава может иметься в виду, в частности, угловое положение соответствующего сустава или параметр, зависящий от него.
Блок управления может быть закреплен на кисти руки оператора, при этом, в частности, могут быть предусмотрены застежки, посредством которых блок управления может быть закреплен на кисти руки и/или на предплечье оператора.
Блок управления, например, может быть соединен с рабочей машиной через беспроводной интерфейс для передачи управляющих сигналов. Следовательно, что касается операций в опасной окружающей обстановке, управление рабочей машиной также возможно из безопасного местоположения и, в частности, на расстоянии от рабочей машины.
Преимущественно, блок управления обеспечивает интуитивное управление рабочей машиной оператором машины, при этом, в частности, равномерные рабочие перемещения оборудования и верхней рамы рабочей машины могут быть легко выполнены.
Сложные рабочие перемещения рабочей машины или рабочего оборудования и инструмента навесного оборудования рабочей машины могут управляться посредством ясно показываемых движений оператора машины посредством устройства управления согласно изобретению. Таким образом, с помощью новых элементов управления, изобретение обеспечивает интуитивное управление рабочими функциями, например, гидравлического экскаватора или другой рабочей машины.
Блок управления может быть эргономично спроектирован, так что он может быть закреплен на кисти руки оператора машины.
Таким образом, изобретение также обеспечивает использование или управление автономными рабочими машинами, в которых водительские рабочие места не предусматриваются на рабочих машинах, и которые, таким образом, подходят для работ в особенно опасных областях работы. Кроме того, затраты на приобретение и эксплуатацию рабочей машины могут быть уменьшены посредством устройства управления согласно изобретению.
Устройство управления может быть внешним блоком дистанционного управления рабочей машиной или блоком дистанционного управления экскаватором, в котором рабочее движение рабочего оборудования и инструмента навесного оборудования, также как и поворотное движение верхней рамы и возможно движения гусеничного привода или другие приводящие движения рабочей машины могут управляться посредством устройства управления. Это применяется, в частности, для копающих движений рабочей машины, которая согласно изобретению может управляться интуитивно через копающие движения кисти руки человека.
В особенно предпочтительном варианте осуществления возможно, что устройство управления содержит в точности два блока управления, при этом посредством первого блока управления положение по меньшей мере одного сустава левой кисти руки и/или посредством второго блока управления положение по меньшей мере одного сустава правой кисти руки оператора могут быть определены. Блок управления или блоки управления могут, конечно, также быть сконфигурированы для использования с произвольной кистью руки оператора машины.
Возможно, что с помощью одной кисти руки оператора или оператора машины выполняются рабочие движения оборудования экскаватора или другого оборудования рабочей машины. Рабочее движение может содержать поворот стрелы и/или рукояти стрелы. Альтернативно или в дополнение, блок управления, ассоциированный с другой кистью руки, может быть использован для управления рабочего движения рабочего инструмента.
Конечно, обратное или отличное размещение блоков управления также является возможным. Блоки управления могут, каждый, быть сконфигурированы для двустороннего управления или для двустороннего использования левой или правой рукой оператора машины.
В другом предпочтительном варианте осуществления возможно, что устройство управления конфигурируется, чтобы формировать по меньшей мере один управляющий сигнал для приведения в действие по меньшей мере одного исполнительного механизма рабочей машины на основе по меньшей мере одного из определенных положений.
В особенно предпочтительном варианте осуществления может быть предусмотрено, что по меньшей мере один исполнительный механизм является первым исполнительным механизмом, который оборудуется, чтобы поворачивать первый фрагмент стрелы рабочей машины относительно верхней рамы рабочей машины, при этом, в частности, первый исполнительный механизм может быть приведен в действие в зависимости от положения запястья. Первый исполнительный механизм, например, может поворачивать поворотный кронштейн или всю стрелу рабочей машины относительно ее верхней рамы.
В настоящем случае выражение "первый исполнительный механизм" не должен пониматься в ограничивающем смысле. Один или единственный исполнительный механизм или множество исполнительных механизмов также могут быть названы первым исполнительным механизмом рабочей машины.
В другом предпочтительном варианте осуществления возможно, что по меньшей мере один исполнительный механизм является вторым исполнительным механизмом, который выполнен с возможностью поворота второго фрагмента стрелы рабочей машины относительно другого фрагмента стрелы, при этом, в частности, второй исполнительный механизм может быть приведен в действие в зависимости от положения по меньшей мере одного пястно-фалангового сустава.
Кроме того, возможен вариант осуществления, в котором по меньшей мере один исполнительный механизм является третьим исполнительным механизмом, который выполнен с возможностью поворота третьего фрагмента стрелы рабочей машины относительно другого фрагмента стрелы, при этом, в частности, третий исполнительный механизм может быть приведен в действие в зависимости от положения по меньшей мере одного проксимального межфалангового сустава и/или дистального межфалангового сустава. Фрагменты стрелы могут быть рукоятями стрелы или другими компонентами стрелы.
В другом предпочтительном варианте осуществления возможно, чтобы по меньшей мере один исполнительный механизм был четвертым исполнительным механизмом, который выполнен с возможностью регулирования рабочего инструмента и/или копающего инструмента рабочей машины, при этом, в частности, четвертый исполнительный механизм может быть приведен в действие в зависимости от положения в точности двух проксимальных межфаланговых суставов и/или дистальных межфаланговых суставов.
В другом предпочтительном варианте осуществления может быть предусмотрено, что по меньшей мере один исполнительный механизм является пятым исполнительным механизмом, который выполнен с возможностью поворота рабочего инструмента и/или копающего инструмента рабочей машины относительно фрагмента стрелы, при этом, в частности, пятый исполнительный механизм может быть приведен в действие в зависимости от положения запястья и/или по меньшей мере одного пястно-фалангового сустава.
Альтернативно или в дополнение, отдельные исполнительные механизмы могут быть приводимыми в действие в зависимости от положений нескольких суставов. Рабочий инструмент, например, может быть копающим приспособлением или экскаваторным ковшом.
В одном варианте осуществления изобретения как раз с двумя блоками управления может быть предусмотрено, что с одним из блоков управления ассоциируется по меньшей мере один из трех исполнительных механизмов, ассоциированных со стрелой согласно пунктам 4-6, в то время как с другим блоком управления ассоциируется по меньшей мере один из исполнительных механизмов, ассоциированных с рабочим инструментом согласно любому из пунктов 7-8. Также возможно, однако, любое другое размещение исполнительных механизмов блоков управления, которое специалист рассматривает как целесообразное.
В другом предпочтительном варианте осуществления возможно, что по меньшей мере один блок управления содержит дисплей, в частности, сенсорный экран.
Через дисплей или сенсорный экран информация об условиях работы рабочей машины и/или данные команд могут быть указаны оператору машины. Кроме того, дополнительные функции управления могут быть выполнены через сенсорный экран.
Согласно изобретению оператору машины может быть оказана помощь посредством компьютеризированного обратного управления. Поскольку рабочие машины могут быть использованы в сетевом окружении участка строительства, сигналы и информация могут передаваться двухсторонним или многосторонним образом между рабочей машиной, устройством управления, окружением рабочей машины и возможно дополнительными устройствами посредством блока управления и, в частности, посредством сенсорного экрана.
Изобретение, кроме того, также направлено на рабочую машину, в частности, гидравлический экскаватор с по меньшей мере одним устройством управления согласно любому из пунктов 1-9 формулы изобретения, при этом устройство управления соединяется с боком управления рабочей машины, в частности, через беспроводной интерфейс. Блок управления может быть бортовым компьютером рабочей машины или любым другим блоком регулировки/управления рабочей машины.
Дополнительные детали и преимущества изобретения будут объяснены подробно со ссылкой на вариант осуществления, показанный на чертежах в качестве примера. На чертежах:
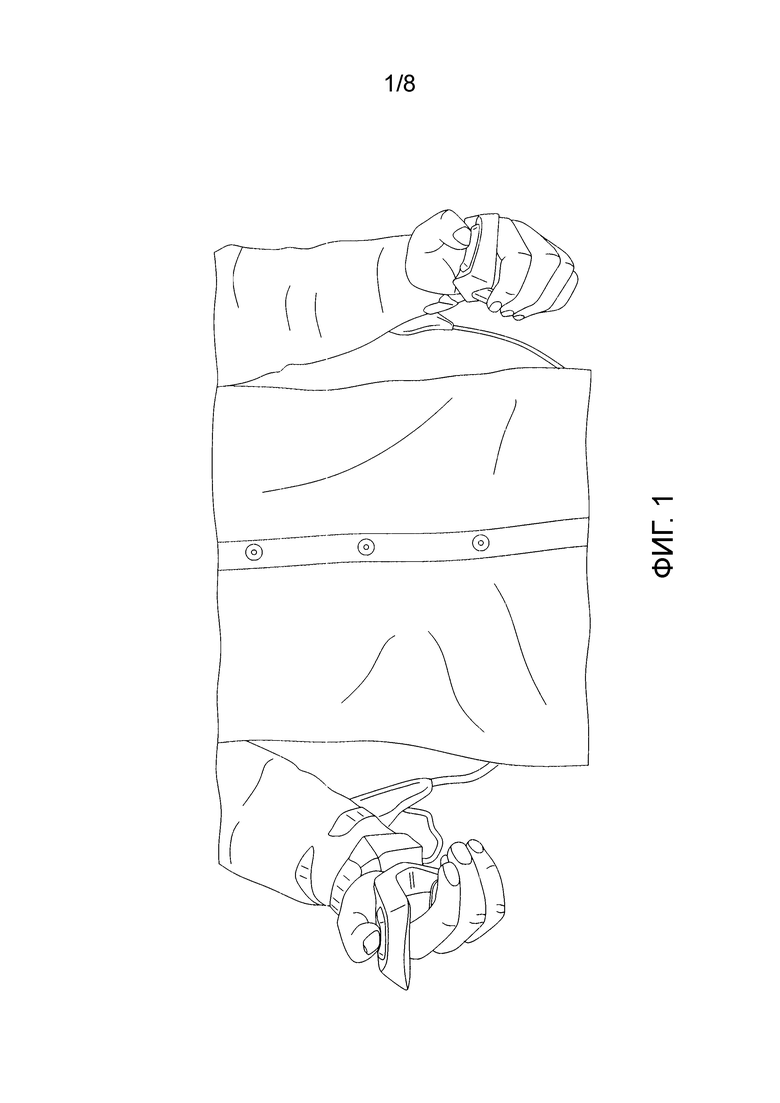
Фиг. 1 показывает частичный вид оператора машины с двумя блоками управления устройства управления согласно изобретению;
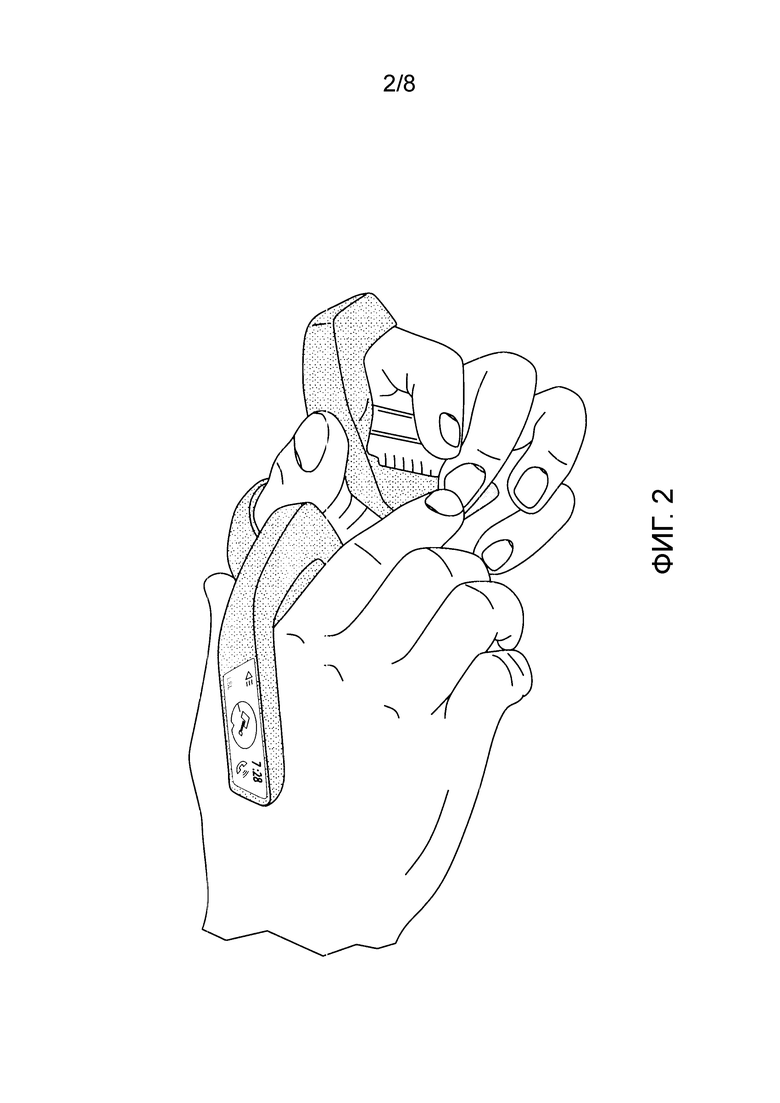
Фиг. 2 показывает подробный вид двух блоков управления;
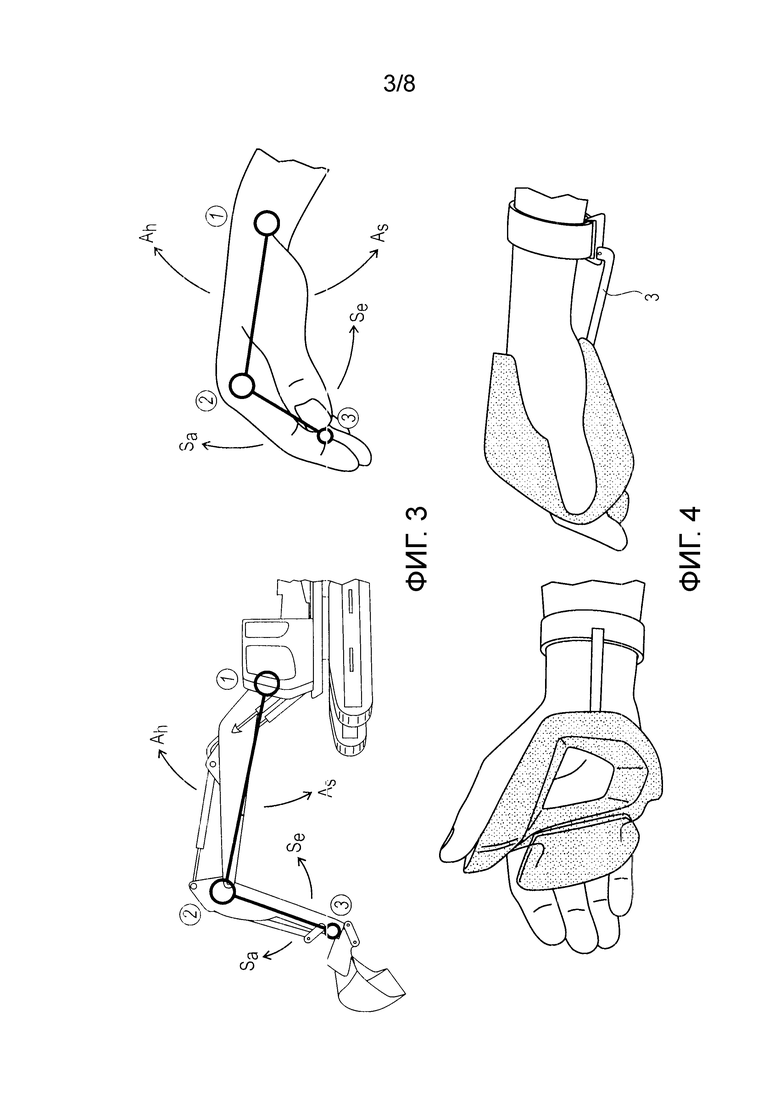
Фиг. 3 показывает сравнение строительной машины и кисти руки оператора машины относительно точек поворота, соответствующих друг другу;
Фиг. 4 показывает вид блока управления;
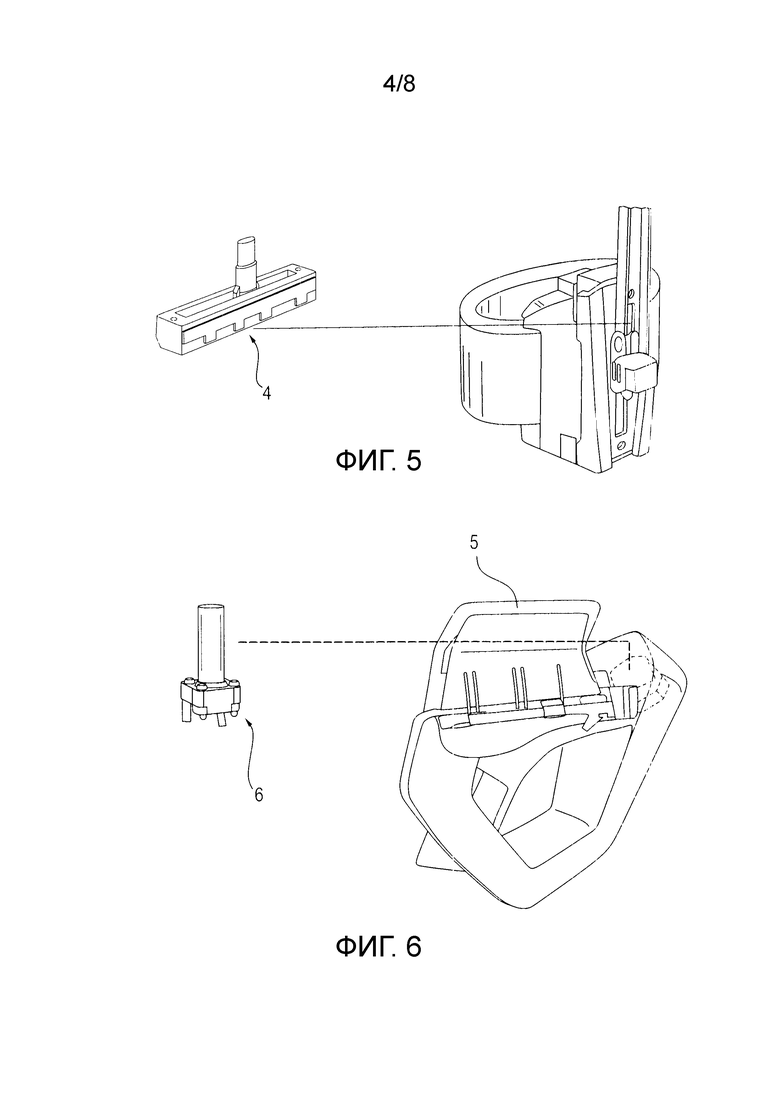
Фиг. 5, 6 показывают примеры устройств для определения положения суставов кисти руки;
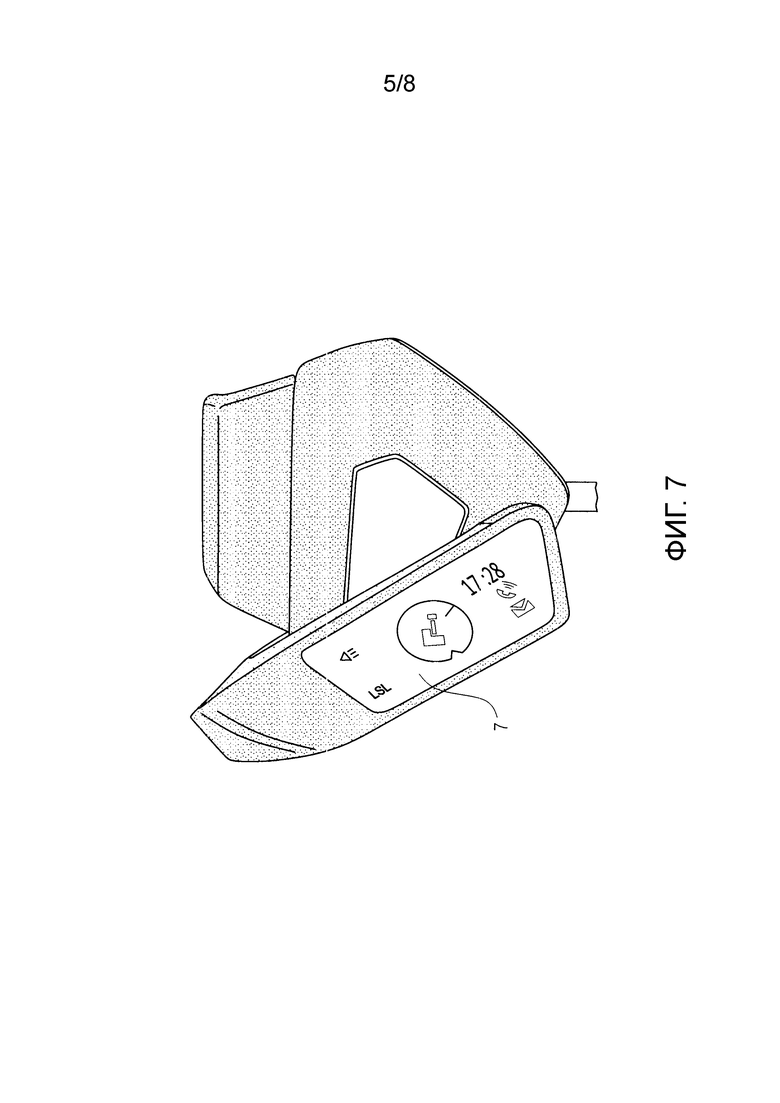
Фиг. 7 показывает примерную конфигурацию блока управления с дисплеем;
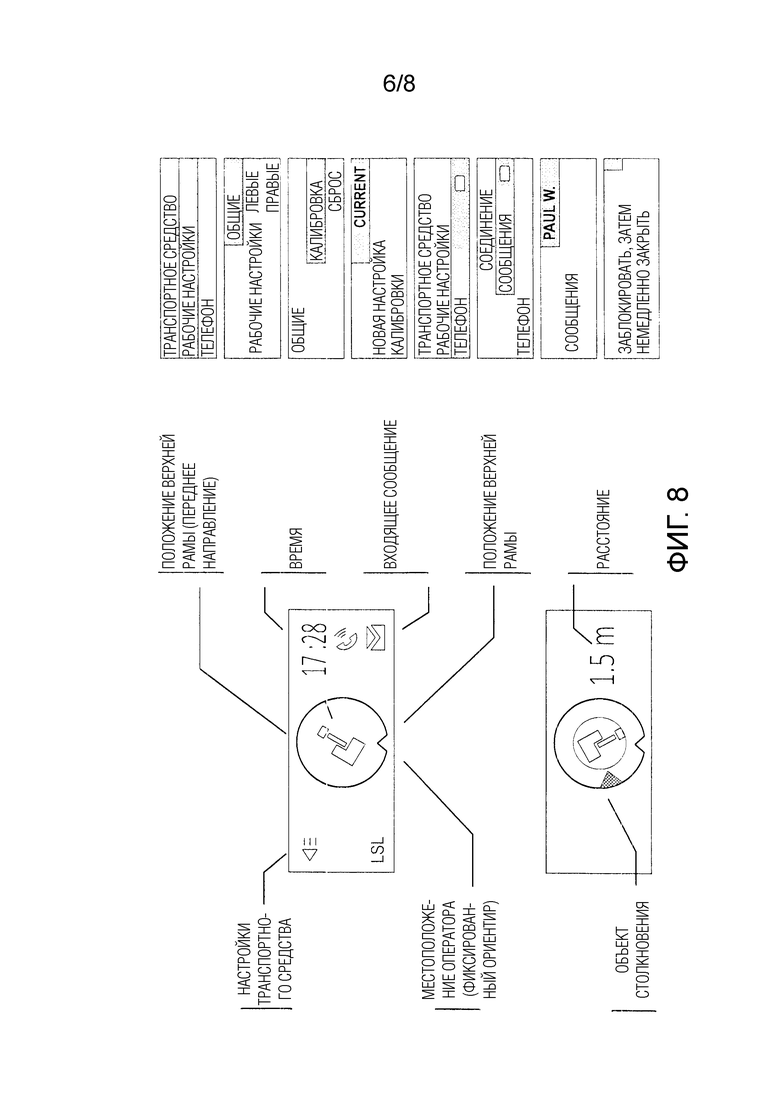
Фиг. 8 показывает примерное изображение дисплея;
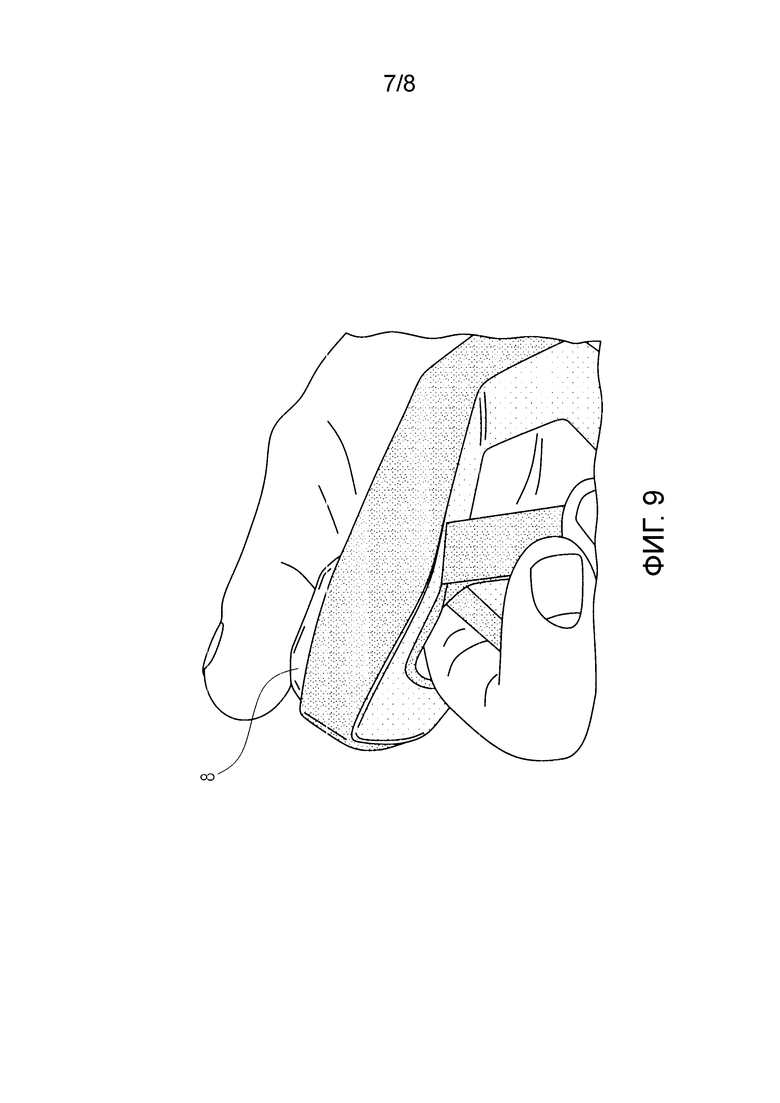
Фиг. 9 показывает примерную конфигурацию блока управления; и
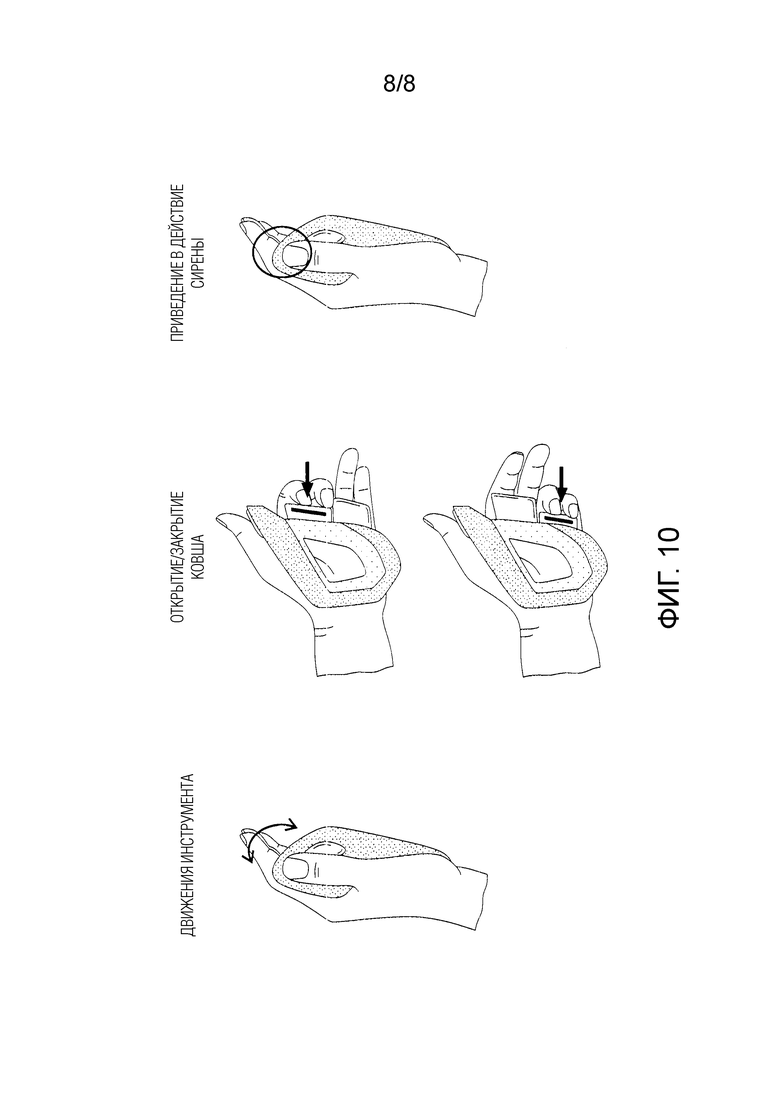
Фиг. 10 показывает примеры формирования управляющих сигналов посредством устройства управления.
Фиг. 1 показывает вид спереди оператора машины с устройством управления, содержащим два блока управления. Посредством устройства управления возможно формировать управляющие сигналы для приведения в действие рабочей машины или строительной машины. Управляющие сигналы могут зависеть от положения по меньшей мере одного сустава кистей рук или пальцев оператора машины. Блок управления, ассоциированный с правой кистью руки оператора машины, например, может обнаруживать положение запястья и положение пястно-фаланговых суставов правой кисти руки оператора машины и с помощью этих положений формировать управляющие сигналы для приведения в действие строительной машины. Например, стрела, такая как стрела экскаватора, может быть приведена в действие согласно положению правой кисти руки и/или ее пальцев. Для определения положения кисти руки механические перемещения блока управления могут быть оцифрованы посредством датчиков, таких как, например, посредством потенциометра, и использованы в качестве выходных значений для формирования управляющих сигналов.
Фиг. 2 показывает подробный вид, на котором дисплей может быть виден на одном из блоков управления. Дисплей может быть сконфигурирован как сенсорный экран. Он может быть использован, чтобы отображать информацию, которая может относиться к строительной машине. Кроме того, он может быть использован для управления функциями строительной машины. Дисплей может быть размещен в фрагменте блока управления, который прижимается к тыльной стороне кисти руки, в частности, в области между большим пальцем и указательным пальцем кисти руки.
Фиг. 3 показывает, что, например, посредством правой кисти руки оператора машины операция копания рабочего оборудования экскаватора может быть воспроизведена. Возможно, что эта функция, а также все другие функции, описанные здесь, каждая, выполняются с помощью соответствующей другой кисти руки. Запястье соответствует точке 1 поворота стрелы на верхней раме строительной машины. Сустав ладони или пястно-фаланговый сустав соответствует точке 2 поворота рукояти стрелы или другого фрагмента стрелы.
Когда кисть руки движется вверх или вниз, это движение преобразуется в управляющие сигналы для приведения в действие строительной машины. Движения стрелы экскаватора или других частей строительной машины, обеспечиваемые посредством управляющих сигналов, могут быть выбраны так, что существует наибольшее возможное соответствие или сходство между движениями кисти руки и строительной машиной. Когда пальцы движутся относительно ладони, движение пальца, например, может соответствовать движению рукояти стрелы строительной машины.
Как может быть воспринято из фиг. 4, блок управления может быть закреплен на кисти руки и/или на предплечье. Кисть руки может быть вставлена между фрагментом с блоком дисплея и верхней частью. Движение кисти руки в запястье или положение запястья может быть передано через подвижную штангу 3.
Фиг. 5 показывает скользящий потенциометр 4, который может захватывать или обнаруживать путь движения кисти руки.
Фиг. 6 показывает блок управления, на верхней части которого установлен качалка 5, который приводится в действие пальцами. Поворотный потенциометр 6 захватывает путь движения пальцев и из него может формировать сигналы для приведения в действие исполнительных механизмов строительной машины.
Фиг. 7 показывает блок управления, на верхней части которого установлен многофункциональный дисплей 7 с сенсорным экраном. На этом дисплее, например, могут быть отображены критические условия работы устройства, предупреждения, текущее местоположение и/или поступающие команды.
Часть управления строительной машиной может быть предоставлена через сенсорный экран. Интерфейс может иметь фиксированную структуру меню, посредством которой различная информация может быть извлечена, и функции могут быть задействованы. Фиг. 8 показывает примерную конфигурацию сенсорного экрана.
Блок управления может быть соединен с устройством управления рабочей машины через беспроводной интерфейс. Данные могут быть переданы рабочей машине через беспроводной интерфейс.
В одном варианте скользящее соединение на кисти руки может альтернативно быть сконфигурировано как качалка. В этом варианте дополнительное исполнительное устройство может управляться через дополнительное сочленение. Представляется возможным назначение запястья стреле или поворотному кронштейну, пальца или сустава ладони - регулировочной стреле или рукояти стрелы и/или сустава пальца - рукояти стрелы строительной машины.
Фиг. 9 показывает, что поворот верхней рамы строительной машины может управляться посредством движения большого пальца, которое, например, может быть определено посредством переключателя 8 на верхней стороне блока управления правой руки.
Фиг. 10 в качестве примера показывает функции, которые могут быть выполнены с помощью одной кисти руки. Хотя показана кисть левой руки, иллюстрированные функции с тем же успехом могут быть выполнены с помощью кисти правой руки.
В левой области фиг. 10 показано то, что посредством сгибания, например, запястья движения или повороты рабочего инструмента/копающего инструмента строительной машины могут управляться.
Согласно средней части фиг. 10, движение инструмента, такое как наклон или опрокидывание ковша, может управляться посредством качалок аналогично движению рукояти стрелы, при этом могут быть предусмотрены две качалки. Одна качалка может быть задействована указательным пальцем и средним пальцем, а другая качалка - безымянным пальцем и мизинцем. Согласно правой части фиг. 10 большой палец может быть использован, например, чтобы приводить в действие сирену.
Положение запястья может быть использовано для активации поворота инструмента навесного оборудования, положение сустава ладони может быть использовано для наклона/опрокидывания инструмента, положение сустава пальца может быть использовано для открытия/закрытия инструмента навесного оборудования, и/или положение большого пальца может быть использовано для поворота инструмента навесного оборудования и/или для испускания предупреждающего сигнала или для приведения в действие сирены. Конечно, более чем один из упомянутых суставов или частей тела могут также быть приняты во внимание для управления соответствующими функциями.
Изобретение обеспечивает улучшение экономии соответствующих строительных машин уже при их покупке и во время их эксплуатации. Изобретение, кроме того, обеспечивает также управление впоследствии добавленными рабочими движениями или функциями рабочей машины и используемых рабочих инструментов. Посредством соответствующего программного обеспечения может становиться возможным противоположное управление затрагиваемыми исполнительными механизмами строительной машины. Программное обеспечение может быть реализовано, например, в блоке управления или регулировки строительной машины. Кроме того, параметры для масштабирования рабочих движений могут быть переданы посредством соответствующего интерфейса. Масштабирование устройства управления может быть приспособлено для различных типов рабочего оборудования строительной машины посредством программного обеспечения.
Устройство управления может быть сконфигурировано, чтобы приспосабливаться к индивидуальным параметрам тела оператора. С этой целью, например, на блоке управления могут быть предусмотрены регулируемые застежки. Отдельные компоненты, в частности, блок управления или блоки управления устройства управления могут быть сконфигурированы зеркально симметрично, так что они могут управляться как левой, так и правой рукой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОРТЕЗ | 2019 |
|
RU2771116C1 |
| СПОСОБ ХИРУРГИЧЕСКОЙ КОРРЕКЦИИ ДЕФОРМАЦИИ КИСТИ ПРИ ПАРАЛИЧЕ ЧЕРВЕОБРАЗНЫХ И МЕЖКОСТНЫХ МЫШЦ | 2018 |
|
RU2686001C1 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| СПОСОБ КОРРЕКЦИИ КОМБИНИРОВАННОЙ СГИБАТЕЛЬНОЙ КОНТРАКТУРЫ КИСТИ И ТРЕХФАЛАНГОВЫХ ПАЛЬЦЕВ ПРИ СПАСТИЧЕСКИХ ПАРАЛИЧАХ | 2016 |
|
RU2648862C2 |
| ВВОД ДАННЫХ ПОЛЬЗОВАТЕЛЕМ | 2010 |
|
RU2556079C2 |
| СПОСОБ КОРРЕКЦИИ КОМБИНИРОВАННОЙ СГИБАТЕЛЬНОЙ КОНТРАКТУРЫ ТРЕХФАЛАНГОВЫХ ПАЛЬЦЕВ И ПРИВОДЯЩЕЙ КОНТРАКТУРЫ ПЕРВОГО ПАЛЬЦА КИСТИ ПРИ СПАСТИЧЕСКИХ ПАРАЛИЧАХ | 2016 |
|
RU2627291C1 |
| Способ реабилитации пациентов с неврологическими нарушениями после ишемического инсульта | 2023 |
|
RU2829423C2 |
| Устройство для восстановления функции четырех пальцев кисти | 2023 |
|
RU2818447C1 |
| Способ изготовления индивидуальных эргономических рукояток лапароскопических хирургических инструментов с использованием трехмерной печати | 2018 |
|
RU2706996C1 |
| СПОСОБ ОЦЕНКИ ПОДВИЖНОСТИ МЕЖФАЛАНГОВЫХ И ПЯСТНОФАЛАНГОВЫХ СУСТАВОВ КИСТИ РУКИ | 2002 |
|
RU2233144C1 |
Изобретение относится к блоку управления для рабочей машины. Рабочая машина с устройством управления включает в себя верхнюю раму и стрелу с по меньшей мере двумя фрагментами стрелы. Устройство управления выполнено с возможностью формирования управляющих сигналов для приведения в действие рабочей машины в зависимости от положения сустава кисти руки оператора и содержит по меньшей мере один блок управления. Блок управления выполнен с возможностью определения положения сустава кисти и положения по меньшей мере одного пястно-фалангового сустава руки и с возможностью формирования на основе этих определенных положений управляющего сигнала для приведения в действие по меньшей мере двух исполнительных механизмом рабочей машины. Первый исполнительный механизм выполнен с возможностью поворота первого фрагмента стрелы относительно верхней рамы рабочей машины в зависимости от положения сустава кисти руки. Второй исполнительный механизм выполнен с возможностью поворота второго фрагмента стрелы относительно первого фрагмента стрелы в зависимости от положения упомянутого по меньшей мере одного пястно-фалангового сустава. Достигается улучшение устройства управления для управления рабочей машиной. 5 з.п. ф-лы, 10 ил.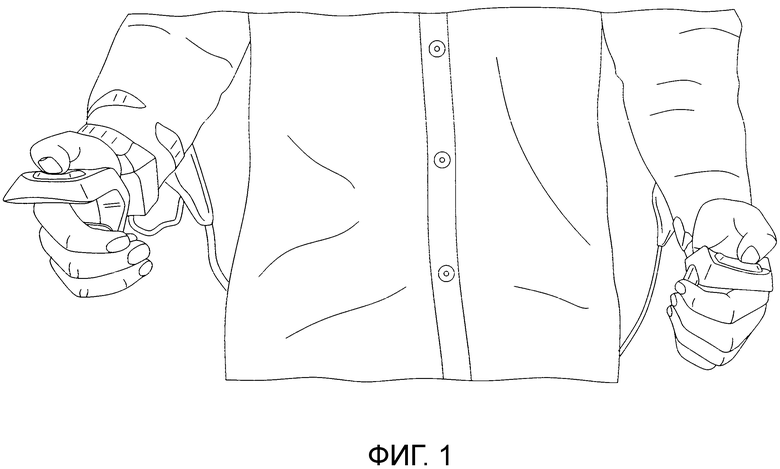
1. Рабочая машина с устройством управления, которое через интерфейс связано с устройством управления рабочей машины, причем рабочая машина включает в себя верхнюю раму и стрелу с по меньшей мере двумя фрагментами стрелы, причем устройство управления выполнено с возможностью формирования управляющих сигналов для приведения в действие рабочей машины в зависимости от положения сустава кисти руки оператора и содержит по меньшей мере один блок управления,
отличающаяся тем, что блок управления выполнен с возможностью определения положения сустава кисти и положения по меньшей мере одного пястно-фалангового сустава руки и с возможностью формирования на основе этих определенных положений управляющего сигнала для приведения в действие по меньшей мере двух исполнительных механизмов рабочей машины, причем первый исполнительный механизм выполнен с возможностью поворота первого фрагмента стрелы относительно верхней рамы рабочей машины в зависимости от положения сустава кисти руки, и причем второй исполнительный механизм выполнен с возможностью поворота второго фрагмента стрелы относительно первого фрагмента стрелы в зависимости от положения упомянутого по меньшей мере одного пястно-фалангового сустава.
2. Рабочая машина по п.1, отличающаяся тем, что блок управления дополнительно выполнен с возможностью определения положения по меньшей мере одного проксимального межфалангового сустава или дистального межфалангового сустава руки, и причем стрела включает в себя третий фрагмент и дополнительный исполнительный механизм, и причем этот дополнительный исполнительный механизм выполнен с возможностью поворота третьего фрагмента стрелы относительно второго фрагмента стрелы в зависимости от положения упомянутого по меньшей мере одного проксимального межфалангового сустава или дистального межфалангового сустава.
3. Рабочая машина по п.1 или 2, отличающаяся тем, что блок управления дополнительно выполнен с возможностью определения положения двух межфаланговых суставов или дистальных межфаланговых суставов руки, причем стрела дополнительно включает в себя по меньшей мере один рабочий инструмент и один дополнительный исполнительный механизм, и причем этот дополнительный исполнительный механизм выполнен с возможностью регулирования рабочего инструмента в зависимости от положения упомянутых проксимальных межфаланговых суставов или дистальных межфаланговых суставов.
4. Рабочая машина по п.3, отличающаяся тем, что упомянутый рабочий инструмент представляет собой копающий инструмент.
5. Рабочая машина по любому из пп.1-4, отличающаяся тем, что упомянутый интерфейс представляет собой беспроводной интерфейс.
6. Рабочая машина по любому из пп.1-5, отличающаяся тем, что она представляет собой гидравлический экскаватор.
| JP 2005212957 A, 11.08.2005 | |||
| KR 20130076101 A, 08.07.2013 | |||
| US 2011257816 A1, 20.10.2011 | |||
| US 2014216192 А, 07.08.2014 | |||
| JP 2006028953 A, 02.02.2006 | |||
| СИСТЕМА И СПОСОБЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОРГУЗОЧНО- РАЗГРУЗОЧНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2012 |
|
RU2578649C2 |

