Изобретение относится к медицине, в частности к устройствам разработки движений в суставах кисти верхней конечности.
Известно устройство для восстановления функции пальцев кисти заявка RU2005119314/14А.
Устройство содержит: опору, элементы крепления, колпачки для концевых фаланг, нагрузочные элементы, упорную скобу для первого пальца, поперечные стержневые перекладины для основной или средней фаланг 2-5 пальцев и пластину на браслете с пряжей для расположения на ладонной поверхности запястья.
Основание выполнено в виде ложемента, повторяющего общий контур кисти с отведенным пальцем. В области расположения пальцев в ложементе выполнены сквозные резьбовые отверстия. На торцевой поверхности ложемента, в области расположения фаланговых пальцев кисти, имеются глухие резьбовые отверстия. Упорная скоба для первого пальца имеет возможность фиксации на ложементе.
Недостатками данного технического решения являются: отсутствие достаточных опорных поверхностей - устройство в отличие от заявленной модели не имеет опорных поверхностей и рычагов регулируемой опоры для четкого контроля при растяжении и разработки пальцев кисти, не снабжено упором ладони снизу и наладонником со стационарными подвижными, регулируемыми тягами пальцев, что не дает возможности заявленной авторами комплексной разработки мышц кисти и искоренения возвратно-поступательной дисфункции движения пальцев, т. к. использование эластичных материалов при комплексном нарушении подвижности в суставах не обеспечивает достаточную фиксацию и управление положением пальцев кисти.
Известно устройство - динамический ортез или шина запястья-кисти-пальца. Патент США 4945902 в котором описана, статическая прогрессивная шина, которая применяет бесступенчато регулируемую прогрессивную силу к пальцу, двум соседним пальцам или большому пальцу. Статическая прогрессивная шина предназначена для увеличения диапазона движений укороченных мягких тканей.
Данное устройство содержит:
(a) опору, имеющую по меньшей мере секцию для руки, размер которой позволяет закрывать значительную часть тыльной поверхности руки, и секцию предплечья, функционально соединенную с указанной секцией для руки;
(b) по меньшей мере одно натяжное устройство, имеющее первый конец, функционально соединенный с указанной опорой, и противоположный второй конец;
(c) по меньшей мере один подушечка кончика пальца, имеющую жесткую дорсальную структуру, прилегающую к дорсальной поверхности пальца руки, и жесткую ладонной структуру, прилегающую к ладонной поверхности пальца руки,
при этом указанные жесткие дорсальные и указанные жесткие ладонные структуры выполнены с возможностью ограничения изгиба дистального межфалангового сустава пальца; и указанный колпачок на кончике пальца функционально соединен с указанным по меньшей мере одним вторым концом натяжного устройства и подвешен к указанной опоре с помощью указанного по меньшей мере одного натяжного устройства, при этом указанный колпачок на кончике пальца приспособлен для приема пальца руки;
при этом указанный по меньшей мере один натяжитель выполнен с возможностью подталкивания указанного наконечника кончика пальца к открытому положению руки и от положения захвата руки.
Данное устройство наряду с очевидными преимуществами перед заявленной моделью в части динамических и прикладных характеристик, мобильности при тренировках пальцев кисти, все же имеет ряд недостатков в части дозированной поэтапной разработки мелкой моторики.
В отличие от заявленного образца данное устройство не имеет механизма плавной регулировки хода при сгибании и разгибании пальца в пястно-фаланговом суставе, не имеет механизма адаптации положения ложемента пальца к изменяющимся положениям опоры (тяги) пальца во время его перемещения, что не дает возможности точного контроля пассивно-активных действий пациента, а это имеет ключевое значение в сложных случаях, когда пациент с патологией чувствительности при заболеваниях ЦНС или в ортопедических случаях при внезапной боли, может совершить неконтролируемое перемещение против эластичного сопротивления конструкции и тем самым нанести себе повреждения. Те же вышеперечисленные сравнения имеют отношения и к контролю радиального положения пальцев кисти, что показывает преимущество стационарно-подвижных шарнирных соединений заявленного образца перед эластичными соединениями в сравнении со «статической прогрессивной шиной».
Наиболее близким техническим решением, прототипом, является устройство для разработки суставов верхней конечности, патент RU № 2766788, в частности блок кисти и механизм регулировки четырех пальцев кисти.
В данном устройстве блок кисти связан с блоком лучезапястного сустава и регулируемым держателем ладонного упора с адаптером, прижимным куполом, скрепляемые с одной стороны с помощью резьбового зажима, а с другой – с помощью позиционной дуги большого пальца и резьбового зажима, при этом блок кисти оснащен ложементами пальцев и регуляторами разгибания пальцев, позволяющее пальцам кисти движение вверх и вниз.
Данный блок содержит следующие соединенные элементы: регулируемый держатель ладонного упора, ладонный упор с адаптером, ушки фиксатора кисти, фиксатор кисти, прижимной купол, ножка прижимного купола, упор пальцев, прорезь адаптера ложемента пальцев, адаптер ложемента пальцев, ложемент пальцев, прорезь регулятора разгибания пальцев, регулятор разгибания пальцев, гайка-фиксатор основания упора пальцев, основание упора пальцев, посадочный шпунт основания упора пальцев, стыковочный выступ позиционной дуги большого пальца, позиционная дуга большого пальца, стопорные отверстия хода большого пальца, стопор хода большого пальца, угловой остов фиксации позиционной дуги большого пальца, резьбовой зажим, держатель ложемента большого пальца, ложемент большого пальца, оконечная шайба.
Вместе с тем, что механизмы установки конструкции на кисть пациента и механизмы хода регулировки пальцев в заявленном образце и в сравниваемом устройстве имеют идентичное назначение и похожий принцип регулировки положения пальцев кисти, имеются существенные различия.
Задачей заявляемого изобретения является создание устройства для нетравматичного, плавного и комплексного растяжения пальцев кисти в прямолинейных и радиальных направлениях и разработки мелкой моторики при различных неврологических и ортопедических патологиях, связанных с ограничением подвижности в пястно-фаланговых суставах кисти.
Поставленная задача решается тем, что в устройстве для восстановления функции четырех пальцев кисти, содержащее шарнирно соединенные элементы; ложемент пальца, кронштейн ложемента пальца, тягу пальца, наладонник, крепежные соединения, упор ладони с элементами крепления и их фиксации во взаиморасположении, отличающееся тем, что блок кисти оснащен плавно регулируемой тягой пальца с возможностью горизонтального смещения кронштейна ложемента пальца для подстройки под анатомическую длину пальца; кронштейн ложемента пальцев и ложемент каждого пальца могут устанавливаться отдельно, за счет чего конструкция удобна для снятия и установки элементов на пораженной кисти руки; причем верхняя часть кронштейна ложемента пальца выполнена в виде резьбового штифта, а нижняя часть кронштейна ложемента пальца выполнена в виде плоского продольного ребра жесткости с параллельными прямыми выступами сверху и вогнутыми выступами снизу; для посадки на кронштейн ложемента пальца, ложемент пальца сверху имеет два параллельных возвышения треугольной формы с противоположными выступами в районе вершины треугольных возвышений, между которыми расположена центральная посадочная проушина, под которой, у 1-го фалангового сустава, расположена сквозная продолговатая вырезка. Данная навесная конструкция соединений и креплений элементов устройства к пальцам, обеспечивает пальцам возможность постоянного физиологически правильного расположения относительно элементов устройства при установке и во время фиксации заданных положений для каждого пальца.
Крепление устройства к руке пациента, выполнено с возможностью крестообразного расположения ремней для охвата кисти сверху и снизу с целью предотвращения смещения пораженной кисти во время процедуры без ограничения подвижности в местах креплений.
В отличие от прототипа заявляемое устройство имеет более надежную систему фиксации элементов конструкции на руке пациента, в отличии от прототипа заявляемое устройство оснащено четырьмя эластичными креплениями, а не двумя, что создает более комфортную и вместе с тем более надежную фиксацию, задние эластичные крепления заявленного устройства, в отличие от прототипа проходят непосредственно по тыльной поверхности ладони полностью охватывают эту поверхность и крестообразным охватом точно и мягко прижимают кисть вместе с верхней частью конструкции к упору ладони, а навесные зажимы установленные подвижно на упоре ладони заявленного устройства в отличие от прототипа обеспечивают более надежную и точную регулировку натяжения фиксировочных ремней в зависимости от размеров кисти пациента, а это создает стабильность положению кисти, что имеет ключевое значение, т.к. в случае спастической деформации кисти, все ее суставы сгибаются и создают скрученное положение кисти, при недостаточной фиксации такое скрученное положение кисти резко снижает возможность реализации поставленной задачи по поэтапной разработке и растяжению четырех пальцев кисти, вместе с тем такое взаимное расположение ремней заявленного изобретения в отличие от прототипа не создает помех подвижности для большого пальца кисти.
В отличие от прототипа, заявленное устройство имеет более верную систему регулировки пальцев с точки зрения биомеханики движения, т.к. при сгибании пальца в пястно-фаланговом суставе происходят отклонения пальца от поперечной оси сустава по радиальной траектории, то соответственно и ложемент пальца должен следовать за этой траекторией, однако в прототипе в отличие от заявленного устройства не предусмотрен «адаптер» создающий физиологическое положение ложементу пальца, что создает ситуацию пересечения траекторий элементов находящихся на разной высоте и приводит к излому элемента конструкции и самого пальца, что доставляет дискомфорт и резко снижает эффективность назначения продукта использования.
В отличие от прототипа в заявленном устройстве роль такого «адаптера» играет с одной стороны кронштейн ложемента пальца, а с другой стороны сам ложемент пальца и его место прикрепление, обеспечивающее своей конфигурацией надежное подвижное сочленение элементов.
В отличие от прототипа в заявленном устройстве каждый ложемент пальца может устанавливается отдельно на каждый палец уже после установки на кисть всей конструкции, что существенно облегчает крепление элементов на паретичной кисти и создает возможность дополнительных действий для самого пациента при снятии ложемента пальца.
В отличие от прототипа в заявленном устройстве есть дополнительные механизмы для регулировки продольных и вертикальных дискретных положений ложемента пальцев, что создает более физиологическую позицию для пальца при регулировке заявленной подвижности с учетом индивидуальных размеров пальца каждого пациента.
В отличие от прототипа в заявленном устройстве предусмотрена дискретная фиксация радиальных положений при отведении пальцев, а также их свободное перемещение в этом направлении при разработке.
В отличие от прототипа в заявленном устройстве упор ладони более компактный по ширине и не ограничивает перемещения большого пальца при универсальности устройства для правой или левой руки.
Устройство для восстановления функции четырех пальцев кисти содержит следующие универсальные элементы: упор ладони, наладонник, механизм регулировки положений четырех пальцев кисти, блок большого пальца.
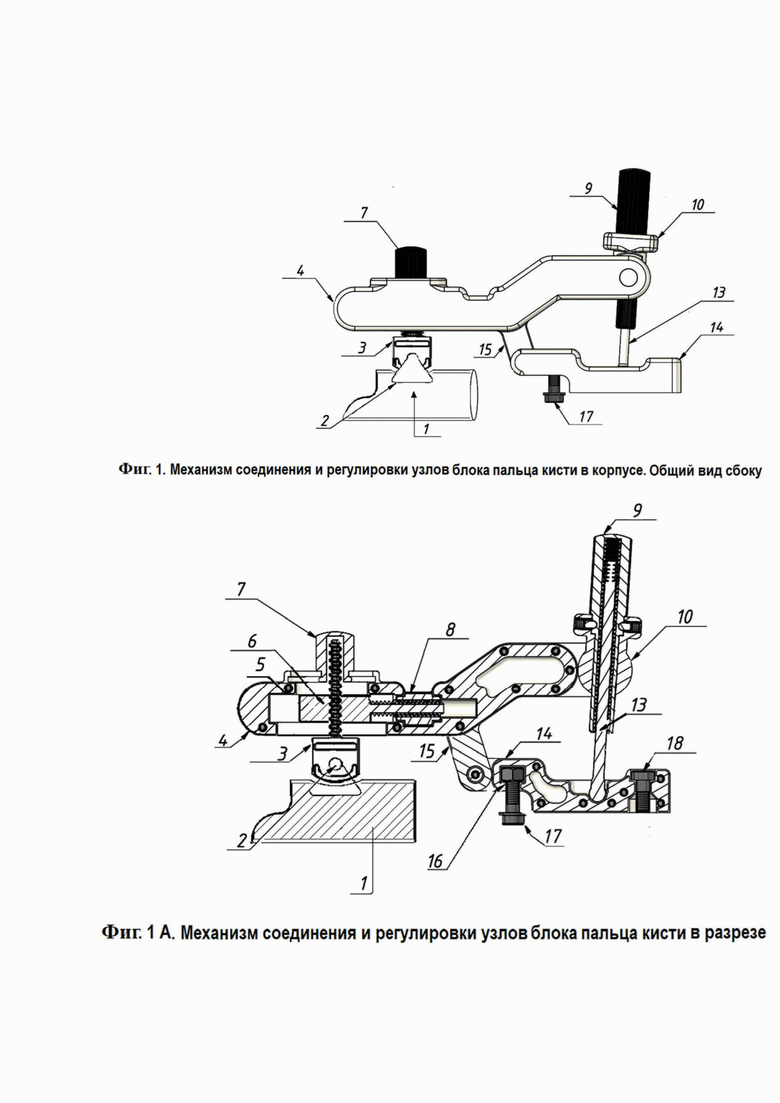
На фиг. 1 показан механизм соединения и регулировки узлов блока пальца кисти в корпусе, общий вид сбоку.
На фиг. 1А показан механизм соединения и регулировки узлов блока пальца кисти в разрезе.
На фиг. 1Б показан механизм соединения и регулировки узлов блока пальца кисти без кронштейна и ложемента пальца; задне-боковой вид в разрезе.
На фиг. 2. Показан Наладонник, передне-боковой вид.
На фиг. 3. Показан Наладонник. Вид снизу.
На фиг. 4. Показаны передние и задние ремни фиксации наладонника и упора ладони.
На фиг. 5А. Показан упор ладони нижне-боковой вид.
На фиг. 5Б. Показан упор ладони верхне-задний вид.
Механизм регулировки положений четырех пальцев кисти состоит из следующих основных элементов (фиг. 1, фиг. 2, фиг. 3): Ложемента пальца 1. Кронштейна ложемента пальца 3. Корпуса тяги пальца 4. Ручки регулировки высоты подъема ложемента пальца 7. Ручки регулировки положения ползунка 8. Ручки регулировки положения кулисы 9. Корпуса кулисы 10. Тяги кулисы 13. Корпуса упора 14. Нижнего 17 и верхнего 18 винтов с цилиндрической головкой.
На фиг. 1 А представлен: Ложемент пальца 1 - имеет продолговатую цилиндрическую форму с небольшим вырезом в передне-верхней части. В средне-верхней располагается Узел стыковки ложемента 2. в виде двух параллельных возвышений трех угольной формы с противоположными выступами в верхней части образующих центральную посадочную проушину, под центральной посадочной проушиной в районе 1го фалангового сустава расположена сквозная продолговатая вырезка. При посадке ложемента пальца 1 на Кронштейн ложемента пальца 3, продолговатая вырезка и центральная посадочная проушина образованная двумя параллельными возвышениями трех угольной формы с противоположными выступами в верхней части, ложемента пальца 1, совмещается с плоским продольным ребром жесткости с вогнутыми выступами снизу, Кронштейна ложемента пальца 3. Таким образом, создается навесное соединение, в котором возвышения трех угольной формы с противоположными выступами в верхней части, ложемента пальца 1, сцепляются с вогнутыми выступами снизу Кронштейна ложемента пальца 3.
Нагруженный весом и давлением пальца, ложемент пальца свободно повисает на нижних вогнутых ребрах кронштейна ложемента пальца. Кронштейн ложемента пальца 3 и ложемент пальца 1 удерживают свободное сочленение. Вся конструкция обеспечивает удобную посадку при установке и анатомическую позицию пальца при изменении положений Корпуса тяги пальца 4, в зависимости от его подъема и опускания. Ложемент пальца одновременно адаптируется и к позиции пальца, и к положению корпуса тяги пальца, совершая: свободные скольжения, прямолинейные отклонения и смещения в передне-заднем и верхне-нижнем направлении. Таким образом, предотвращается положение излома и конструкции и самого пальца.
Кронштейн ложемента пальца верхним резьбовым штифтом, входит снизу вверх, в прорезь корпуса тяги пальца состоящего из двух продольных половинок скрепленных по всему контуру соединениями - имбусными Шурупами с цилиндрической головкой 5. Далее кронштейн ложемента пальца верхним резьбовым штифтом входит в отверстие Ползунка 6, и за тем, в резьбовую полость Ручки регулировки высоты подъема ложемента пальца 7, которая при вращении затягивает Кронштейн ложемента пальца в верх или опускает вниз. Функцию горизонтального смещения кронштейна ложемента пальца выполняет ползунок, положение ползунка регулируется при помощи Ручки регулировки положения ползунка 8, по такому же принципу резьбовой регулировки, оба элемента так же закреплены в корпусе тяги пальца.
На фиг. 1Б изображены все элементы, осуществляющие функцию регулировки сгибания и разгибания корпуса тяги пальца. Ручка регулировки положения кулисы 9, закрепленная в Корпусе кулисы 10, при помощи Сухаря 11, и Установочных винтов 12, Вся конструкция размещается в корпусе тяги пальца и имеет с ним подвижное сочленение.
Тяга кулисы 13 своим верхним концом с трапециевидной резьбой входит в резьбовую полость ручки регулировки положения кулисы, а нижним Т-образным концом в соответствующее ему поперечное углубление в Корпусе упора 14.
При вращении ручки регулировки положения кулисы происходит смена сгибания и разгибания конструкции от 0 до 90 градусов, при этом основной рычаг приходится на Опору пальца 15 - нижнее ответвление корпуса тяги пальца с нижней центральной осью, вокруг которой происходит перемещение всех элементов, закрепленных в корпусе тяги пальца.
Отклонение пальца регулируется и фиксируется при помощи соединения - Шестигранной гайки 16, в передней части корпуса упора и Нижнего винта с цилиндрической головкой 17, при этом, само радиальное смещение происходит относительно Верхнего винта с цилиндрической головкой 18, находящегося в задней части корпуса упора. Фиксация радиального отклонения создает возможность комплексного растяжения люмбрикальных мышц кисти.
Верхний винт 18 соединяет Посадочное основание 19 Корпуса наладонника 20 (фиг. 2, фиг. 3), при посадке соответствующим гнездом посадки в корпусе упора 14. Два соединенных элемента являются осью, обеспечивающей радиальное отклонение пальца. Передняя часть корпуса упора 14 ложится на Радиальную прорезь 21, Радиального гребня 22 соответствующим скосом, обеспечивая дистальное радиальное перемещение относительно вышеописанных элементов. Фиксацию радиального смещения обеспечивают сверху - шестигранная гайка 16 и снизу - нижний винт 17, фиксирующий корпус упора 14 к радиальному гребню 22 через радиальную прорезь 21 корпуса наладонника 20.
Корпус наладонника 20 напоминает по форме равнобедренную трапецию, зауживающуюся сзади и слегка вогнутую снизу. Этой частью он примыкает к выпуклой поверхности тыльной части ладони.
В передней части корпуса наладонника 20, расположены элементы, обеспечивающие его фиксацию к передней части ладони и соединение с нижними элементами общей конструкции. Передне-торцевые отверстия 23 - обеспечивают резьбовые соединения. Продольные прорези 24 - обеспечивают эластичные соединения.
В задней части корпуса наладонника 20, расположены элементы, обеспечивающие фиксацию наладонника к передней части ладони и соединение с нижними элементами общей конструкции.
С задней части корпус наладонника 20, прикрепляется к задней части ладони при помощи Косых прорезей 25 расположенных с обоюдным наклоном для Х-образного пересечения передних и задних ремней фиксации 28 (фиг. 4).
При установке на пациента, задние ремни фиксации, выходящие из Косых прорезей 25 заднего крепления и прилегают непосредственно к поверхности тыльной стороны ладони, обеспечивая тем самым не травматичное, но при этом уверенное примыкание кисти к конструкции, а Х-образное и взаимно-перпендикулярное направление задних ремней фиксации делает возможным анатомически точный охват кисти, сохраняя при этом, полные амплитуды всех подвижностей в лучезапястном суставе.
Угловые задние части корпуса наладонника 20, утолщены и имеют округло-продолговатую форму, слегка расходясь в стороны, через них проходят Задние отверстия 26, для посадки узла большого пальца кисти. Для этой же цели на торцевых поверхностях по окружности проходят Посадочные шлицы 27.
Передние и задние ремни фиксации 28 (фиг. 4) Связывают последующие элементы при посадке и креплении всего блока на кисти пациента. Передние входят сверху в Продольные прорези 29 Упора ладони 30 (фиг. 5А, фиг. 5Б) и зажимаются Навесными зажимами 31, расположенными вертикально, а задние ремни 28 охватывают заднюю часть кисти крест - накрест и зажимаются задними навесными зажимами 31 располагающимися горизонтально.
Корпус упора ладони 30 (фиг. 5А, фиг. 5Б) выполнен в виде Т- образной конфигурации с незначительно выпуклой верхней поверхностью, упор поддерживает площади опоры спереди в районах окончаний пястных суставов и примыкает к ним передней частью. Задней зауженной стороной упор ладони при посадке кисти примыкает к нижней задней поверхности ладони, к её естественному углублению в районе соединения ладьевидной, полулунной и трехгранной костей кисти. Т-образная форма с вырезами по бокам дает возможность свободного движения суставам большого пальца кисти.
Упор ладони в передней части имеет с двух сторон параллельные продольные прорези 29 для прохождения эластичных ремней для фиксации 28. Нижняя часть упора ладони снабжена стальной съемной рукоятью 32 прикрепляющуюся к нему снизу при помощи четырех болтов с передней и задней стороны, болты фиксируются в соответствующие им углублениями с резьбой в корпусе упора ладони. Рукоять имеет регулировочные отверстия выдвижного язычка - соединяющего устройство с другими элементами, эти же отверстия служат для установки навесных зажимов 31 ремней фиксации 29. Данные зажимы фиксируются спереди в вертикальной позиции на против прорезей и в горизонтальной позиции сзади - они могут отклоняться согласно направлению натянутых ремней при соединении. С обеих передних боковых сторон упор ладони 30 имеет торцевые отверстия 33 для дополнительного резьбового сочленения с передними отверстиями 23 наладонника 20, что дает соединениям всех элементов дополнительную стабильность при движении кистью.
Расположение всех элементов устройства для восстановления функции четырех пальцев кисти представлено на фиг. 6.
Использование заявляемого изобретения позволяет осуществлять нетравматичное, плавное и комплексное растяжение четырех пальцев кисти в прямолинейных и радиальных направлениях и разработку мелкой моторики при различных неврологических и ортопедических патологиях, связанных с ограничением подвижности в пястно-фаланговых суставах кисти.



Изобретение относится к медицинской технике, а именно к устройствам разработки движений в суставах кисти верхней конечности. Устройство для восстановления функции четырех пальцев кисти содержит шарнирно соединенные элементы, ложемент пальца, кронштейн ложемента пальца, тягу пальца, наладонник, крепежные соединения, упор ладони с элементами крепления и фиксации элементов крепления. Блок кисти оснащен плавно регулируемой тягой пальца с возможностью горизонтального смещения кронштейна ложемента пальца для подстройки под анатомическую длину пальца. Кронштейн ложемента пальца и ложемент каждого пальца выполнены с возможностью установки отдельно. Верхняя часть кронштейна ложемента пальца выполнена в виде резьбового штифта, нижняя часть кронштейна ложемента пальца выполнена в виде плоского продольного ребра жесткости с параллельными прямыми выступами сверху и вогнутыми выступами снизу. Для посадки на кронштейн ложемента пальца, ложемент пальца сверху имеет два параллельных возвышения треугольной формы, между которыми расположена центральная посадочная проушина, под которой, у 1-го фалангового сустава, расположена сквозная продолговатая вырезка. Крепление устройства на руке пациента выполнено с возможностью крестообразного расположения ремней при охватах кисти сверху и снизу для предотвращения смещения пораженной кисти во время процедуры без ограничения подвижности в местах креплений. Техническим результатом является создание устройства для нетравматичного, плавного и комплексного растяжения пальцев кисти в прямолинейных и радиальных направлениях и разработки мелкой моторики при неврологических и ортопедических патологиях, связанных с ограничением подвижности в пястно-фаланговых суставах кисти. 6 ил.
Устройство для восстановления функции четырех пальцев кисти, содержащее шарнирно соединенные элементы, ложемент пальца, кронштейн ложемента пальца, тягу пальца, наладонник, крепежные соединения, упор ладони с элементами крепления и фиксации элементов крепления, отличающееся тем, что блок кисти оснащен плавно регулируемой тягой пальца с возможностью горизонтального смещения кронштейна ложемента пальца для подстройки под анатомическую длину пальца; кронштейн ложемента пальца и ложемент каждого пальца выполнены с возможностью установки отдельно; причем верхняя часть кронштейна ложемента пальца выполнена в виде резьбового штифта, а нижняя часть кронштейна ложемента пальца выполнена в виде плоского продольного ребра жесткости с параллельными прямыми выступами сверху и вогнутыми выступами снизу; для посадки на кронштейн ложемента пальца, ложемент пальца сверху имеет два параллельных возвышения треугольной формы, между которыми расположена центральная посадочная проушина, под которой, у 1-го фалангового сустава, расположена сквозная продолговатая вырезка; при этом крепление устройства на руке пациента выполнено с возможностью крестообразного расположения ремней при охватах кисти сверху и снизу для предотвращения смещения пораженной кисти во время процедуры без ограничения подвижности в местах креплений.
| CN 113827448 A, 24.12.2021 | |||
| KR 20190008586 A, 25.01.2019 | |||
| CN 114081792 A, 25.02.2022 | |||
| CN 110974606 A, 10.04.2020 | |||
| CN 106618959 A, 10.05.2017. |

