Заявленное техническое решение относится к измерительной технике и может быть использовано для измерения линейных перемещений с помощью преобразователя перемещения индукционного типа.
Известен «Бесконтактный датчик положения с взаимной индуктивностью» по патенту Франции: FR 2830614 A1 от 11.04.2003 г., МПК G01D 5/22 - [1], содержащий нанесенные печатные прямоугольные обмотки на пластинах из диэлектрического материала, рядом с обмотками находятся пластины из материала с высокой магнитной проницаемостью и ферромагнитные площадки, между которыми находится перемещаемый магнит, положение которого определяется по возмущению электромагнитного поля между ферромагнитными площадками.
Недостатком известного изобретения является то, что печатные обмотки связаны через магнитный контур, магнитная проницаемость материала которого очень сильно зависит от температуры, что требует усложнения конструкции датчика, введением температурной компенсации. Кроме того, наличие магнитного контура позволяет использовать только низкий диапазон рабочих частот, что также снижает точность измерения.
Известен «Индукционный преобразователь линейных перемещений» по авт.св. СССР №1516751 от 23.10.1989 г., МПК G01B 7/00 - [2], содержащий подвижную и неподвижную части из диэлектрического материала в виде коаксиальных трубок и продольными разрезами и с нанесенными на них печатными зигзагоподными прямоугольными обмотоками, активные проводники которых взаимно параллельны и расположены с одинаковым шагом.
Также известен «Датчик положения» по патенту США US 2942212 от 21.06.1960 г., кл. 336-30 - [3], содержащий подвижную и неподвижную части из диэлектрического материала с нанесенными на них печатными зигзагоподобными прямоугольными обмотоками, активные проводники которых взаимно параллельны и расположены с одинаковым шагом.
Направление перемещения подвижной части относительно неподвижной в аналогах [2] и [3] осуществляется перпендикулярно активным длинным проводникам зигзагоподных прямоугольных катушек. Такое перемещение катушек относительно друг друга существенно усложняет схему обработки сигналов от датчика, снижает ее надежность и повышает стоимость производства.
Известна «Катушка индуктивного измерительного преобразователя» по авторскому свидетельству СССР №1552240 от 23.03.1990 г., МПК H01F 15/14, G01B7/00 - [4], содержащая неподвижное диэлектрическое основание с размещенной на ее поверхности зигзагоподобной обмоткой в виде распределенных на поверхности основания одинаковых четырехугольных разомкнутых ячеек и подвижную часть в виде якоря, который может быть изготовлен из диэлектрика - измеряет емкость обмотки, электропроводника - измеряет добротность обмотки, или ферромагнетик - измеряет индуктивность обмотки.
Недостатком аналога [4] является выполнение сложного геометрического канала в слое диэлектрика, укладка в него проводника обмотки и ее закрепление, что существенно усложняет технологию производства и ее стоимость. Кроме того, показания прототипа сильно зависят от температуры, при которой происходит его эксплуатация.
Прототипом предложенного технического решения является «Индукционный датчик положения» по патенту РФ: RU 2454625 от 27.06.2012 г., МПК8 G01B 7/00, G01D 5/20 - [5], содержащий неподвижную часть и подвижную часть датчика, выполненные в виде пары плоских катушек из диэлектрического материала, обращенных друг к другу сторонами с нанесенными на них печатными зигзагоподными прямоугольными плоскими катушками индуктивности, соответственно с пассивными короткими и активными длинными печатными проводниками, которые взаимно параллельны и расположены с одинаковым шагом, подвижная часть установлена с возможностью перемещения с одной степенью свободы относительно неподвижной части вдоль активных длинных проводников зигзагоподных прямоугольных катушек. Причем неподвижная часть индукционного датчика положения может содержать две идентичные катушки, установленные вдоль направления перемещения подвижной части с катушкой, которая при этом расположена в первоначальном состоянии по центру между неподвижными катушками неподвижной части.
Недостатком прототипа [5] является наличие коммутационных проводов, подсоединенных к катушке подвижной части датчика, которые при динамических измерениях могут разрушится, что снижает долговечность и надежность индукционного датчика положения.
Недостаток прототипа ставит задачу существенного повышения надежности индукционного датчика положения.
Указанная задача решается тем, что для подвода напряжения на зигзагоподную прямоугольную плоскую катушку индуктивности подвижной части применена вторая пара катушек аналогична подвижной и неподвижной части первой пары, используемая как питающий трансформатор, причем подвижные части первой и второй пары датчиков жестко связаны между собой, а их катушки соединены между собой.
Таким образом, сущность заявляемого изобретения заключается в том, что индукционный датчик положения, содержащий неподвижную и подвижную части из диэлектрического материала, обращенные друг к другу сторонами с нанесенными на них печатными зигзагоподными прямоугольными катушками индуктивности, соответственно с пассивными короткими и активными длинными печатными проводниками, которые взаимно параллельны и расположены с одинаковым шагом, подвижная часть установлена с возможностью перемещения относительно неподвижной части с одной степенью свободы вдоль активных длинных проводников зигзагоподных прямоугольных катушек, при этом индукционный датчик положения содержит вторую, аналогичную первой, пару плоских катушек с длинной неподвижной и короткой подвижной катушками, при этом длина неподвижной катушки больше длины подвижной катушки для всего диапазона ее перемещения, подвижные плоские катушки обеих пар разделены и жестко связаны между собой, ко второй неподвижной длинной катушке подведено питание от генератора синусоидального сигнала, подвижные катушки обеих пар соединены между собой проводниками.
Неподвижная часть первой пары плоских катушек индукционного датчика положения может содержать две идентичные катушки, установленные вдоль направления перемещения подвижной части с катушкой, которая при этом расположена в первоначальном состоянии по центру между неподвижными катушками неподвижной части.
Введение признаков: «индукционный датчик положения, содержащий неподвижную и подвижную части из диэлектрического материала, обращенные друг к другу сторонами с нанесенными на них печатными зигзагоподными прямоугольными катушками индуктивности, соответственно с пассивными короткими и активными длинными печатными проводниками, которые взаимно параллельны и расположены с одинаковым шагом, подвижная часть установлена с возможностью перемещения относительно неподвижной части с одной степенью свободы вдоль активных длинных проводников зигзагоподных прямоугольных катушек» и «индукционный датчик положения содержит вторую, аналогичную первой, пару плоских катушек с длинной неподвижной и короткой подвижной катушками, при этом длина неподвижной катушки больше длины подвижной катушки для всего диапазона ее перемещения, подвижные плоские катушки обеих пар разделены и жестко связаны между собой, ко второй неподвижной длинной катушке подведено питание от генератора синусоидального сигнала, подвижные катушки обеих пар соединены между собой проводниками» необходимо для исключения из датчика коммутационных проводов подсоединенных к катушке подвижной части датчика, которые при динамических измерениях могут разрушиться. Этим решаются задачи существенного повышения долговечности и надежности работы индукционного датчика положения.
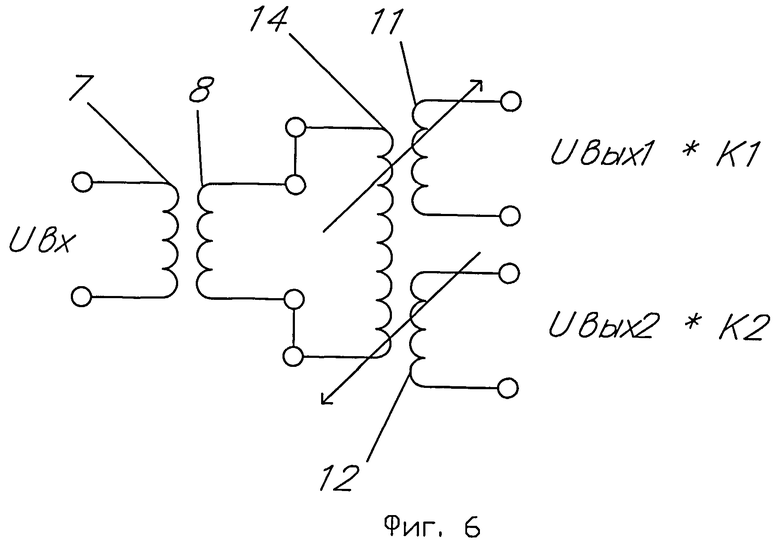
На фиг.1 представлены: а) первая пара неподвижной и подвижной части индукционного датчика с нанесенными на них печатными зигзагоподными прямоугольными катушками индуктивности; б) вторая пара неподвижной и подвижной части индукционного датчика (вид на катушки). На фиг.2,а) - первая пара неподвижной и подвижной части индукционного датчика с нанесенными на них печатными зигзагоподными прямоугольными катушками индуктивности в рабочем состоянии; б) вторая пара неподвижной и подвижной части индукционного датчика (неподвижная и подвижная части индукционного датчика перемещения обращены друг к другу катушками). На фиг.3,а) - первая пара неподвижной части датчика с двумя катушками и подвижной частью датчика с одной катушкой; б) вторая пара неподвижной и подвижной части индукционного датчика (вид на катушки). На фиг.4 - эквивалентная схема индукционного датчика по фиг.1 и по фиг.2. На фиг.5 - схемотехническое решение для обеспечения работоспособности датчика по фиг.1 и по фиг.2. На фиг.6 - эквивалентная схема индукционного датчика перемещения по фиг 3. На фиг.7 - схемотехническое решение для обеспечения работоспособности датчика по фиг.3.
Индукционный датчик положения содержит неподвижную 1 и подвижную 2 части с возможностью перемещения подвижной 2 части относительно неподвижной 1 части с одной степенью свободы. Неподвижная 1 и подвижная 2 части датчика выполнены из диэлектрического материала и обращены друг к другу сторонами с нанесенными на них печатными зигзагоподными прямоугольными катушками индуктивности, соответственно 3 и 4, с пассивными короткими и активными длинными печатными проводниками, которые взаимно параллельны и расположены с одинаковым шагом. При этом подвижная 2 часть установлена с возможностью перемещения относительно неподвижной 1 части вдоль активных длинных проводников зигзагоподных прямоугольных катушек 3 и 4. Направление перемещения подвижной части 2 относительно неподвижной 1 осуществляется параллельно активным длинным проводникам зигзагоподных прямоугольных катушек 3 и 4. При этом индукционный датчик положения содержит вторую, аналогичную первой, пару: неподвижную 5 и подвижную 6 части с возможностью перемещения подвижной 6 части относительно неподвижной 5 части с одной степенью свободы. Неподвижная дополнительная часть 5 содержит длинную плоскую катушку 7, а подвижная дополнительная часть 6 содержит короткую плоскую катушку 8. Длина неподвижной катушки 7 больше длины подвижной катушки 8 для всего диапазона ее перемещения. Подвижные плоские катушки 4 и 8 обеих пар частей индуктивного датчика 1, 2 и 5, 6 разделены и жестко связаны между собой, ко второй неподвижной длинной катушке 7 подведено питание от генератора синусоидального сигнала, а подвижные катушки 4 и 8 обеих пар соединены между собой проводниками.
Неподвижная часть индукционного датчика положения может содержать две части 9 и 10 с идентичными катушками 11 и 12, установленные вдоль направления перемещения подвижной части 13 с катушкой 14, которая при этом расположена в первоначальном состоянии по центру между неподвижными катушками 11 и 12, расположенным на неподвижных частях датчика 9 и 10. Катушки 11 и 12 могут быть нанесены на одну неподвижную часть, длина которой будет равна суме длин неподвижных частей 9 и 10 индуктивного датчика. При этом вторая, аналогичная первой, пара индуктивного датчика содержит, как указано выше, неподвижную 5 и подвижную 6 части с соответственно длинной неподвижной плоской катушкой 7 и подвижной короткой плоской катушкой 8. Также длина неподвижной катушки 7 больше длины подвижной катушки 8 для всего диапазона ее перемещения.
Для объяснения работы индукционного датчика перемещения могут быть применены эквивалентные схемы в виде измерительного трансформатора с линейно изменяющимся коэффициентом связи между катушками и с возбуждением от питающего трансформатора - фиг.4, или дифференциального измерительного трансформатора возбуждением от питающего трансформатора - фиг.6. Для обеспечения работоспособности индуктивных датчиков перемещения по структурным схемам фиг.4 и фиг.6 могут быть использованы типовые схемотехнические решения, представленные соответственно на фиг.5 и фиг.7.
На фиг.5: Г - генератор синусоидального сигнала питания первичной катушки 7 (неподвижной части 5 второй пары катушек) питающего трансформатора со вторичной катушкой 8 (подвижной части 6 второй пары катушек), катушка 8 соединена с первичной катушкой 4 (подвижной части 2 первой пары катушек) измерительного трансформатора, вторичной катушкой подвижной части 2; ПД - пиковый детектор; У - усилитель масштабный; U вых - аналоговый выходной сигнал с катушки 3, пропорциональный перемещению подвижной части 2 с катушкой 4.
На фиг.7: Г - генератор синусоидального сигнала питания первичной катушки 7 (неподвижной части 5 второй пары катушек) питающего трансформатора со вторичной катушкой 8 (подвижной части 6 второй пары катушек), катушка 8 соединена с первичной катушкой 14 (подвижной части 13 первой пары катушек) измерительного трансформатора, вторичные катушки которого 11 и 12 расположены на подвижных частях 9 и 10; ПД1 - пиковый детектор для катушки 11; ПД2 - пиковый детектор для катушки 12; У - усилитель масштабный; U вых - аналоговый выходной суммарный сигнал с катушек 11 и 12, пропорциональный перемещению подвижной плоской катушки 14 между неподвижными плоскими катушками 11 и 12.
Наличие в индуктивном датчике второй аналогичной первой, пары плоских катушек с длинной неподвижной и короткой подвижной катушками, у которой (пары частей) длина неподвижной катушки больше длины подвижной катушки для всего диапазона ее перемещения, позволяет исключить из датчика коммутационные подвижные провода, подсоединенные к катушке подвижной части датчика, и, следовательно, при динамических измерениях - существенно повысить долговечность и надежность работы индукционного датчика положения.
Реально для рабочих частот порядка 2-х МГц в габаритных размерах подвижной 13 части 42×22 мм и неподвижной части (9 и 10) 84×22 мм, шагом проводников катушек 11, 12 и 14, равным 0,8 мм, при ширине проводников 0,5 мм и воздушном зазоре между подвижной и неподвижной частью 0,2 мм рабочая зона по перемещению подвижной части 13 составляет 35 мм. Диапазон изменения выходного сигнала при этом составляет ±2 В с погрешностью преобразования не хуже ±0,5%.
Современная технология печатных плат позволяет изготавливать печатные катушки с высокой степенью точности, в связи с этим при необходимости получения более высокой точности преобразования требования к шагу и ширине проводников, а также к воздушному зазору между катушками могут быть и более жесткими.
Как видно из вышеизложенного, наиболее целесообразно использовать такой индукционный датчик перемещения в системах контроля деформации различных объектов.
Полагаем, что предложенный индукционный датчик положения обладает всеми критериями изобретения, так как совокупность ограничительных и отличительных признаков формулы изобретения является новым для конструкций индукционных датчиков положения и, следовательно, соответствует критерию "новизна".
Совокупность признаков формулы изобретения предложенного устройства не известна на данном уровне развития техники и не следует общеизвестным правилам разработки и конструирования индукционных датчиков положения, что доказывает соответствие критерию "изобретательский уровень".
Разработка, конструирование и внедрение предложенного индукционного датчика положения не представляет никаких конструктивно-технических и технологических трудностей, откуда следует соответствие критерию "промышленная применимость".
Литература
1. Патент Франции: FR 2830614 A1 от 11.04.2003 г., МПК G01D 5/22 - «Бесконтактный датчик положения с взаимной индуктивностью».
2. Авторское свидетельство СССР по авт.св. СССР №1516751 от 23.10.1989 г., МПК G01B 7/00 - «Индукционный преобразователь линейных перемещений».
3. Патент США US 2942212 от 21.06.1960 г., кл. 336-30 - «Датчик положения».
4. Авторское свидетельство СССР №1552240 от 23.03.1990 года, МПК H01F 15/14, G01B 7/00 - «Катушка индуктивного измерительного преобразователя».
5. Патент РФ: RU 2454625 от 27.06.2012 года, МПК8 G01B 7/00, G01D 5/20 - «Индукционный датчик положения» - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДУКЦИОННЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ | 2014 |
|
RU2570232C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ | 2012 |
|
RU2502046C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК ПОЛОЖЕНИЯ | 2011 |
|
RU2454625C1 |
| ИНДУКЦИОННЫЙ ВРАЩАЮЩИЙСЯ ТРАНСФОРМАТОР | 2014 |
|
RU2584010C1 |
| Индукционный датчик углового положения | 2017 |
|
RU2655632C1 |
| Индукционный датчик положения | 2023 |
|
RU2817313C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК СИЛЫ | 2011 |
|
RU2472122C1 |
| ИНДУКТИВНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2008 |
|
RU2367902C1 |
| Парамагнитный датчик | 2021 |
|
RU2778032C1 |
| ИНКРЕМЕНТНЫЙ ЕМКОСТНЫЙ ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2010 |
|
RU2427794C1 |





Относится к измерительной технике и может быть использовано для измерения линейных перемещений с помощью преобразователя перемещения индукционного типа. Техническим результатом заявленного изобретения является существенное повышение надежности работы индукционного датчика положения. Технический результат достигается благодаря тому, что индукционный датчик положения дополнительно содержит вторую, аналогичную первой, пару плоских катушек (7) и (8) с длинной неподвижной и короткой подвижной катушками, причем длина неподвижной катушки (7) должна быть такой, чтобы при максимальном смещении короткая подвижная катушка (8) не выходила за пределы неподвижной катушки (7), подвижные плоские катушки (4) и (8) обеих пар частей индуктивного датчика разделены и жестко связаны между собой, ко второй неподвижной длинной катушке (7) подведено питание от генератора синусоидального сигнала, подвижные катушки (8) и (4) обеих пар соединены между собой проводниками. Неподвижная часть первой пары плоских катушек индукционного датчика положения может содержать две идентичные катушки, установленные вдоль направления перемещения подвижной части с катушкой, которая при этом расположена в первоначальном состоянии по центру между неподвижными катушками неподвижной части. 7 ил.
1. Индукционный датчик положения, содержащий неподвижную и подвижную части из диэлектрического материала, обращенные друг к другу сторонами с нанесенными на них печатными зигзагоподобными прямоугольными катушками индуктивности, соответственно с пассивными короткими и активными длинными печатными проводниками, которые взаимно параллельны и расположены с одинаковым шагом, подвижная часть установлена с возможностью перемещения относительно неподвижной части с одной степенью свободы вдоль активных длинных проводников зигзагоподобных прямоугольных катушек, отличающийся тем, что индукционный датчик положения содержит вторую, аналогичную первой, пару плоских катушек с длинной неподвижной и короткой подвижной катушками, при этом длина неподвижной катушки больше длины подвижной катушки для всего диапазона ее перемещения, подвижные плоские катушки обеих пар разделены и жестко связаны между собой, ко второй неподвижной длинной катушке подведено питание от генератора синусоидального сигнала, подвижные катушки обеих пар соединены между собой проводниками.
2. Индукционный датчик положения по п.1, отличающийся тем, что неподвижная часть первой пары плоских катушек индукционного датчика положения содержит две идентичные катушки, установленные вдоль направления перемещения подвижной части с катушкой, которая при этом расположена в первоначальном состоянии по центру между неподвижными катушками неподвижной части.
| ИНДУКЦИОННЫЙ ДАТЧИК ПОЛОЖЕНИЯ | 2011 |
|
RU2454625C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 1992 |
|
RU2044999C1 |
| Устройство для подачи полос в рабочую зону пресса | 1972 |
|
SU441074A1 |
| US 6293150 B1, 25.09.2001 | |||
| US 0006532824 B1, 18.03.2003. | |||

