Изобретение относится к области управления полетами летательных аппаратов (ЛА) и может быть применено в многопозиционных системах наблюдения воздушного пространства, используемых для управления полетами ЛА на трассе движения и в районе аэродромов.
Многопозиционная система наблюдения (МПСН) относится к радиотехническим средствам обзора воздушного пространства с разнесенными приемными сенсорами и общим сервером для приема и объединения принятых сенсорами сигналов, излучаемых ЛА, с последующей оценкой параметров положения (координат) обнаруженных ЛА.
В МПСН измерение параметров пространственного положения обнаруживаемых ЛА производится путем привязки сигналов, принимаемых приемными сенсорами, к отсчетам единого времени, общего для всех сенсоров (временная синхронизация сенсоров), и последующей оценки разности времен прихода сигналов в приемные каналы сенсоров с учетом известного пространственного положения сенсоров.
Известны МПСН, отличающиеся вариантами временной синхронизации приемных сенсоров с помощью различных источников единого времени.
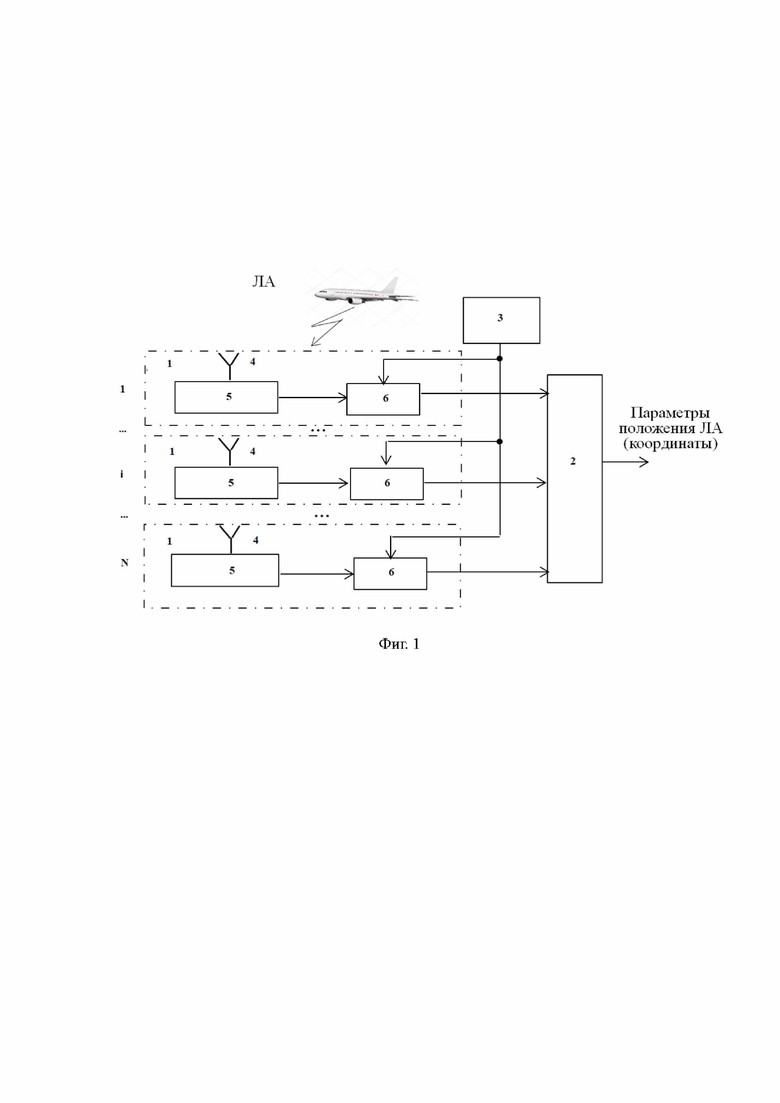
Известна МПСН, в которой синхронизация приемных сенсоров выполняется от одного источника времени (общих часов), формирующего периодические импульсы (метки) времени [1, Figure 10]. В указанной МПСН на аналого-цифровые преобразователи (АЦП) 6, входы которых подключены к выходам соответствующих приемников 5 с приемными антеннами 4, всех приемных сенсоров 1 подаются одинаковые метки единого текущего времени, вырабатываемые высокостабильным генератором общих часов 3 и привязывающие (синхронизирующие) идентичные фрагменты сигналов, принимаемых N приемными сенсорами 1, к единой временной шкале (фиг. 1).
Общие часы 3, вырабатывающие единое текущее время, в зависимости от взаимного расположения сервера 2 и разнесенных сенсоров 1 могут располагаться как в составе МПСН на сервере 2 или в одном из приемных сенсоров 1, так и снаружи МПСН (фиг. 1).
Синхронизация от общих часов 3 требует передачи сигнала единого времени по аналоговым или цифровым физическим линиям наземной проводной связи или по каналам воздушной радиосвязи (каналам передачи данных), которые должны без искажений, с известными калиброванными временными задержками (в частном случае, одинаковыми) в реальном времени передать разветвленные сигналы единого времени во все приемные сенсоры 1. Практическая реализация высокостабильных физических линий передачи аналоговых (цифровых) сигналов с одинаковыми или фиксированными калиброванными временными задержками является сложной технической задачей и требует дополнительных материальных и строительных затрат.
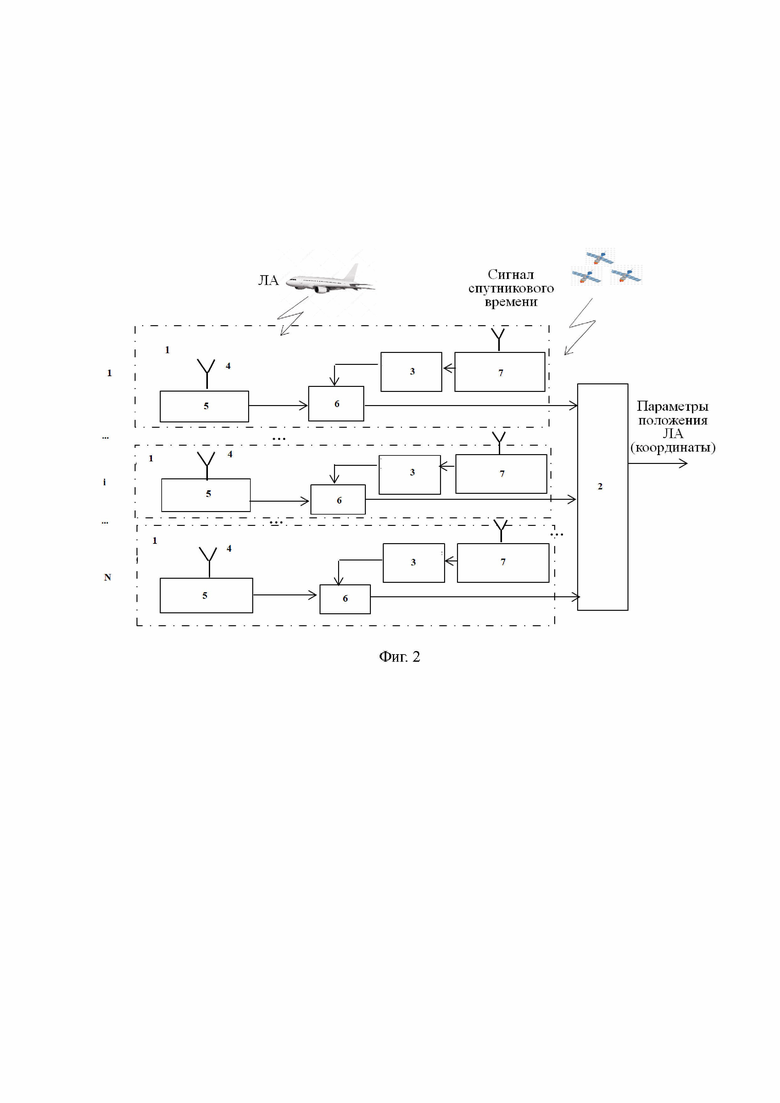
Известна МПСН, в которой синхронизация приемных сенсоров 1 не требует использования общих часов, наличия высокостабильных физических линий передачи сигналов с одинаковыми или фиксированными калиброванными временными задержками и выполняется от внешних эталонных сигналов времени, принимаемых в МПСН по радиоканалу от спутников глобальной навигационной спутниковой системы (ГЛОНАСС) или глобальной системы позиционирования (GPS и т.п.) [1, Figure 13]. В таких МПСН в каждом сенсоре 1 устанавливаются идентичные местные часы 3 и дополнительные приемники ГЛОНАСС/GPS 7 для приема спутниковых сигналов, синхронизирующих местные часы 3 для синхронной работы аналого-цифровых преобразователей 6 разнесенных сенсоров 1 (фиг. 2). Глобальная спутниковая система используется для предоставления общего эталонного сигнала единого времени для каждого из приемных сенсоров 1. Спутниковые сигналы отличаются высокой точностью и стабильностью системного времени, что является важным фактором для обеспечения точного измерения параметров положения объектов наблюдения. Это время может быть использовано в качестве общего единого времени для всех сенсоров 1.
Синхронизация МПСН с помощью ГЛОНАСС и GPS проще по сравнению с вариантом использования внешних общих часов (фиг. 1), так как не требуется установка дополнительного внешнего оборудования, не нужна прокладка каналов связи и не требуется выполнение условия обеспечения одинаковых или фиксированных калиброванных временных задержек передачи сигналов в сенсорах.
Недостатком МПСН, использующих ГЛОНАСС и GPS, является ухудшение и нарушение работоспособности при замираниях спутниковых сигналов, обусловленных изменением параметров ионосферы и магнитного поля земли, а также появлением мешающих сигналов сторонних радиоэлектронных средств. Другой недостаток - необходимость использования в сенсорах 1 дополнительного оборудования в виде приемников ГЛОНАСС/GPS 7, работающих на несущих частотах передатчиков спутниковых систем ГЛОНАСС и GPS. Дополнительно к недостаткам можно отнести возможность глушения и подмены сигналов ГЛОНАСС и GPS.
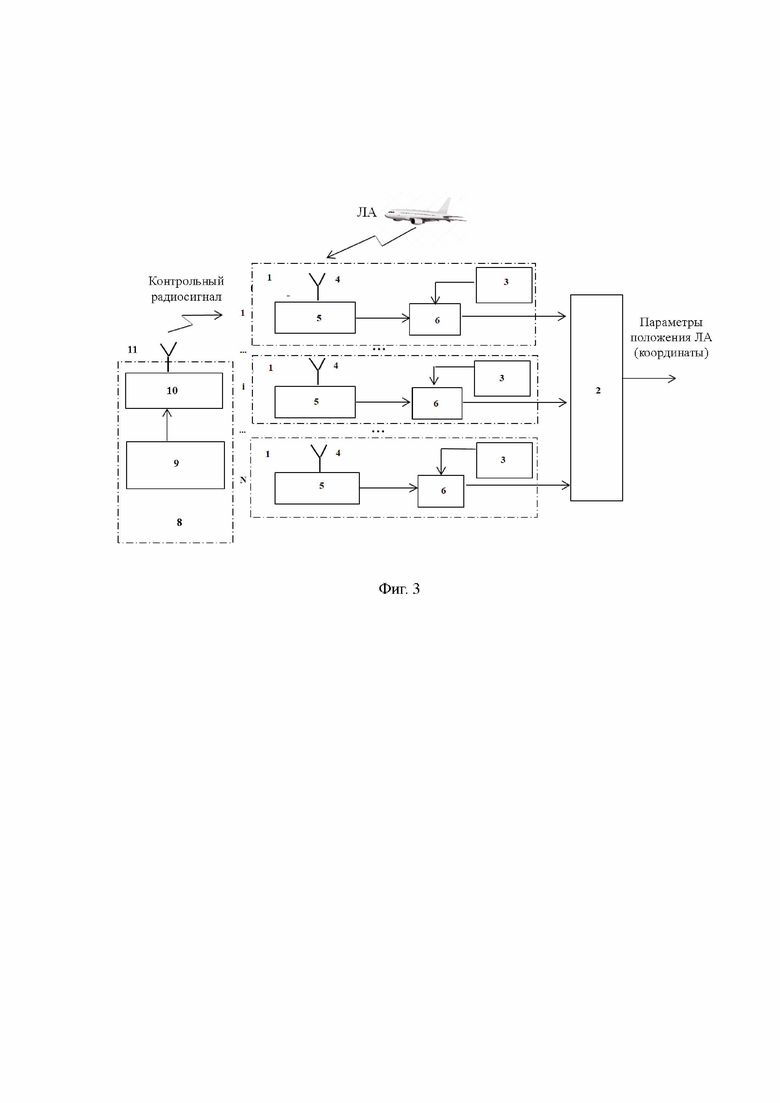
Наиболее близким аналогом (прототипом) заявленного изобретения является МПСН [1, Figure 12]. МПСН-прототип содержит N (не менее 3-х) идентичных приемных сенсоров 1, каждый из которых содержит приемник 5 с приемной антенной 4, АЦП 6 и местные часы 3, общий сервер 2, N входов которого подключены к выходам N сенсоров 1, а также передатчик контрольного радиосигнала 8 (фиг. 3). АЦП 6 приемных сенсоров 1 тактируются тактовыми импульсами идентичных местных часов 3. В МПСН-прототипе синхронизация приемных сенсоров 1 обеспечивается без использования внешних общих часов с каналами передачи данных и выполняется по внешнему контрольному радиосигналу, создаваемому передатчиком контрольного радиосигнала 8 и направляемому в МПСН по радиоканалу. Передатчик контрольного радиосигнала 8, содержащий формирователь контрольного радиосигнала 9 и передающее устройство 10 с передающей антенной 11, устанавливается в зоне расположения МПСН в некоторой точке земной поверхности с известными координатами при обязательном условии обеспечения прямой радиовидимости всех приемных сенсоров 1. В сервере 2, объединяющем выходные сигналы сенсоров 1, выполняется оценка временного положения сигналов, принимаемых от объекта наблюдения сенсорами 1, относительно тактовых импульсов местных часов 3 и контрольного радиосигнала.
В МПСН-прототипе контрольный радиосигнал излучается передатчиком контрольного радиосигнала 8 на несущей частоте, совпадающей с несущей частотой радиосигналов, излучаемых обнаруживаемым ЛА, и принимается теми же антеннами приемных сенсоров 1, на которые поступают радиосигналы от ЛА. Поступление в приемные каналы сенсоров 1 меток времени, маркеров или других идентичных фрагментов контрольного радиосигнала обеспечивает привязку (синхронизацию) местных часов 3 всех приемных сенсоров 1 к единой временной шкале.
Недостатком МПСН-прототипа является необходимость установки и использования дополнительного оборудования - внешнего передатчика контрольного радиосигнала 8 в пределах прямой видимости приемных сенсоров 1.
Другим недостатком МПСН-прототипа является понижение характеристик измерения координат ЛА ввиду ухудшения работоспособности МПСН при нестабильной работе или выходе из строя передатчика контрольного радиосигнала 8, при постоянном или временном затенении передатчика контрольного радиосигнала 8 естественными и преднамеренными статичными или движущимися препятствиями в направлении на сенсоры, а также при воздействии радиопомех. Понижение характеристик измерения координат ЛА, возникающее в условиях меняющегося качества работы передатчика контрольного радиосигнала 8, а также меняющейся затеняющей и помеховой обстановки, обусловлено тем, что не учитывается возможность дополнительной синхронизации сенсоров МПСН от альтернативных источников единого времени, что не позволяет повышать точность и надежность системы. Отсутствие дополнительной синхронизации сенсоров МПСН не позволяет также совершенствовать МПСН - повышать ее надежность и точность, присоединяя иные источники получения синхронизирующей информации, например, такие как радиосигналы местных телевизионных центров.
При разработке предлагаемого изобретения решалась техническая проблема, заключающаяся в создании МПСН, лишенной указанных выше недостатков.
Техническим результатом предлагаемого изобретения является повышение точности и надежности МПСН.
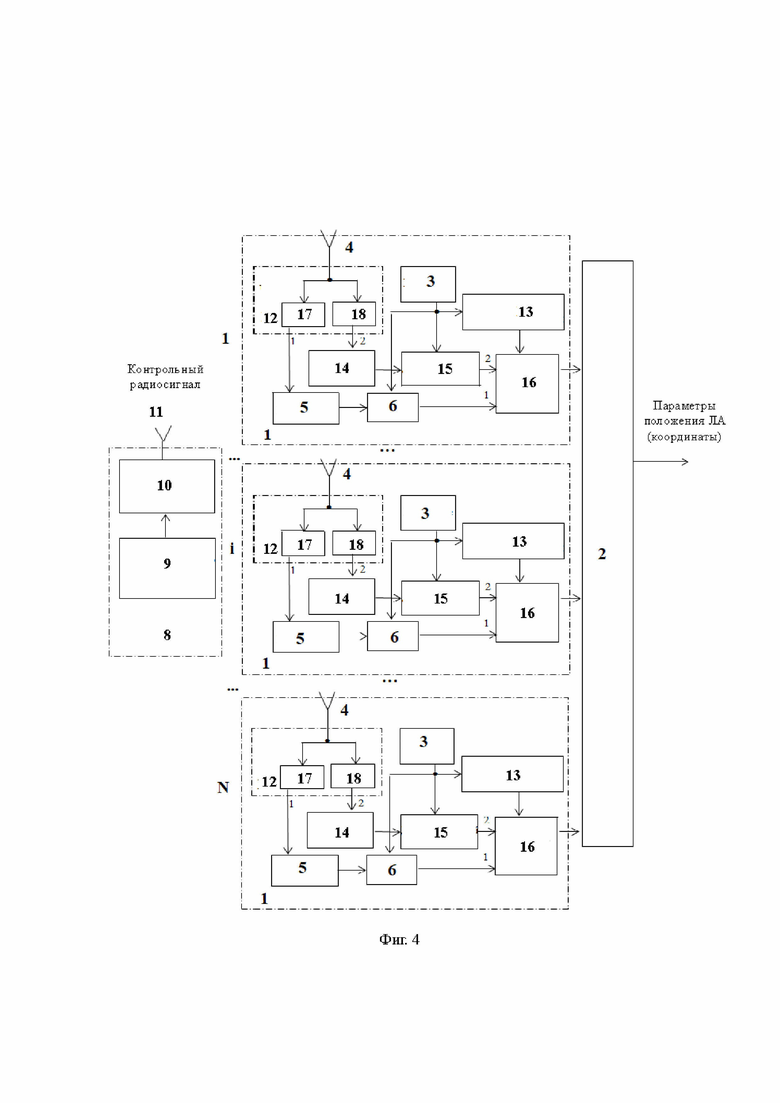
Указанный технический результат достигается тем, что МПСН управления воздушным движением, содержащая N (не менее 3) идентичных приемных сенсоров 1, каждый из которых содержит приемник 5, приемную антенну 4, АЦП 6 и местные часы 3, сервер 2, N входов которого подключены к выходам соответствующих N сенсоров 1, а также передатчик контрольного радиосигнала 8, содержащий формирователь контрольного радиосигнала 9 и передающее устройство 10 с передающей антенной 11, дополнительно снабжена частотно-разделительным устройством (ЧРУ) 12, подключенным входом к выходу приемной антенны 4 и состоящим из параллельно включенных фильтра высоких частот (ФВЧ) 17 и фильтра нижних частот (ФНЧ) 18, объединенные входы которых являются входом ЧРУ 12, выход ФВЧ подключен ко входу приемника 5 и является первым выходом ЧРУ 12, приемником телевизионного сигнала (ТВС) 14, вход которого подключен к выходу ФНЧ 18, являющемуся вторым выходом ЧРУ 12, дополнительным АЦП 15, сигнальный вход которого подключен к выходу приемника ТВС 14, а тактирующий вход - к выходу местных часов 3, формирователем строба управления 13, вход которого подключен к выходу местных часов 3, и коммутатором 16, первый (сигнальный) вход которого подключен к выходу АЦП 6, второй (сигнальный) вход - к выходу дополнительного АЦП 15, третий (управляющий) вход к выходу формирователя строба управления 13, а выход является выходом сенсора 1.
На фиг. 1 представлена известная функциональная схема МПСН [1], в которой синхронизация приемных сенсоров 1 выполняется от одного источника времени (общих часов), формирующего периодические импульсы (метки) времени.
На фиг. 2 представлена известная функциональная схема МПСН, в которой синхронизация приемных сенсоров 1 не требует использования общих часов и выполняется от внешних эталонных сигналов времени, принимаемых в МПСН по радиоканалу от спутников глобальной навигационной спутниковой системы (ГЛОНАСС) или глобальной системы позиционирования (GPS и т.п.) [1, Figure 13].
На фиг. 3 представлена функциональная схема МПСН-прототипа [1, Figure 12].
На фиг. 4 представлена функциональная схема заявляемой МПСН.
На схемах использованы следующие обозначения:
1 - сенсор,
2 - сервер,
3 - часы,
4 - приемная антенна,
5 - приемник,
6 - аналого-цифровой преобразователь,
7 - приемник ГЛОНАСС/GPS,
8 - передатчик контрольного радиосигнала,
9 - формирователь контрольного радиосигнала,
10 - передающее устройство,
11 - передающая антенна,
12 - частотно-разделительное устройство,
13 - формирователь строба управления,
14 - приемник телевизионного сигнала,
15 - дополнительный аналого-цифровой преобразователь,
16 - коммутатор,
17 - фильтр высоких частот,
18 - фильтр нижних частот.
Осуществление предлагаемой МПСН состоит в следующем.
Сигналы от передающей антенны обнаруживаемого ЛА и сигналы от передающей антенны 11 передатчика контрольного радиосигнала 8 принимаются приемными антеннами 4 каждого из N (не менее 3) идентичных приемных сенсоров 1, проходят соответствующие фильтры высоких частот 17, пропускающие радиосигналы ЛА, а также передатчика контрольного радиосигнала 8 и блокирующие прохождение телевизионных сигналов, усиливаются в соответствующих приемниках 5, настроенных на согласованный прием импульсных последовательностей сигналов ЛА, а также передатчика контрольного радиосигнала 8, и преобразуются в цифровой код в дискретные моменты времени при помощи тактовых импульсов, вырабатываемых местными часами 3, в соответствующих аналого-цифровых преобразователях 6. Полученные цифровые последовательности с выходов АЦП 6 подаются на вход 1 соответствующих коммутаторов 16.
Одновременно телевизионные сигналы от местного телевизионного центра принимаются приемными антеннами 4 каждого из N сенсоров 1, проходят соответствующие фильтры нижних частот 18, пропускающие телевизионные сигналы и блокирующие прохождение высоких частот сигналов ЛА и передатчика контрольного радиосигнала 8, усиливаются в соответствующих приемниках ТВС 14, настроенных на согласованный прием ТВС, и преобразуются в цифровой код в дискретные моменты времени при помощи тактовых импульсов, вырабатываемых местными часами 3, в соответствующих дополнительных АЦП 15. Полученные цифровые последовательности с выходов дополнительных АЦП 15 подаются на вход 2 соответствующих коммутаторов 16.
Коммутация цифровых кодов сигналов ЛА, передатчика контрольного радиосигнала 8 и телевизионных сигналов для обеспечения их последовательной передачи с выхода каждого из N сенсоров 1 на соответствующий вход сервера 2 выполняется в коммутаторе 16 путем использования выходного сигнала формирователя строба управления 13, поступающего на управляющий вход коммутатора 16 и представляющего собой, например, 2-битовый двоичный код, значение которого меняется в зависимости от вида пропускаемого сигнала. При этом, например, при значении кода 00 на выход коммутатора 16, являющийся выходом сенсора 1, могут пропускаться сигналы ЛА, при коде 01 - контрольные радиосигналы передатчика контрольного радиосигнала 8, а при коде 11 - ТВС.
Таким образом, с выхода каждого из N сенсоров 1 по соответствующим каналам связи на сервер 1 последовательно поступают принятые сенсорами 1 сигналы ЛА, контрольные радиосигналы передатчика контрольного радиосигнала 8 и телевизионные сигналы.
В сервере 2 МПСН известным образом (подобно аналогу и прототипу) принятые от N сенсоров 1 сигналы ЛА используются для определения пространственных координат ЛА, а сигналы передатчика контрольного радиосигнала 8 - для обеспечения взаимной временной синхронизации сенсоров 1. Прием сенсорами 1 и передача на сервер 2 телевизионных сигналов позволяет обеспечить дополнительную относительную временную синхронизацию сенсоров 1, что повышает достоверность обнаружения, точностные характеристики и надежность измерения координат ЛА в МПСН.
Сигнал, посланный ЛА, принимается N сенсорами 1, расположенными друг от друга на некотором расстоянии, в разное время, зависящее от расстояний между ЛА и сенсорами 1. Разница во времени приема сигнала ЛА двумя произвольными сенсорами 1 описывается пространственным гиперболоидом, на котором находится ЛА. Пересечение гиперболоидов, соответствующих отдельным парам сенсоров 1, определяет конкретную точку расположения ЛА в пространстве. Таким образом, определяется точное местонахождение объекта в пространстве. Так как основным параметром для расчета координат точки расположения ЛА в пространстве является время прихода сигнала, то на первый план выходит синхронизация всех приемных сенсоров 1 по времени и точность определения времени.
С целью количественной оценки уменьшения ошибки (погрешности) синхронизации при использовании ТВС в дополнение к синхронизации от контрольного радиосигнала определим величину зависимости средней квадратической ошибки (СКО) синхронизации радиосигналов ЛА, принимаемых сенсорами, в случае одновременной временной привязки (синхронизации) при помощи контрольных радиосигналов и ТВС.
Время текущей привязки (синхронизации) радиосигнала ЛА к контрольному радиосигналу в сенсоре определим выражением

где Т - истинное (действительное) текущее время приема радиосигнала ЛА сенсором, определяемое расстоянием между сенсором и ЛА,
Δt1 - ошибка (погрешность) привязки (синхронизации) радиосигнала ЛА к контрольному радиосигналу в сенсоре.
Время текущей привязки (синхронизации) радиосигнала ЛА к ТВС в сенсоре определим аналогичным выражением

где Δt2 - ошибка привязки (синхронизации) радиосигнала ЛА к ТВС в сенсоре.
Из выражений (1) и (2) следует, что время одновременной текущей привязки (синхронизации) радиосигнала ЛА к контрольному радиосигналу и ТВС в сенсоре с учетом статистической независимости синхронизации по каналам контрольного радиосигнала и ТВС можно определить выражением

Из выражения (3), полагая, что величины Δt1 и Δt2 распределены по равномерному закону с нулевым средним значением, с учетом статистической независимости ошибок синхронизации по каналам контрольного радиосигнала и ТВС получим среднее значение величины Т12 в сенсоре

Средний квадрат времени одновременной привязки (синхронизации) радиосигнала ЛА к контрольному радиосигналу и ТВС определим из (3) выражением

где  - дисперсия временной синхронизации радиосигнала ЛА к контрольному радиосигналу, равная средней величине квадрата Δt1,
- дисперсия временной синхронизации радиосигнала ЛА к контрольному радиосигналу, равная средней величине квадрата Δt1,
 - дисперсия временной синхронизации радиосигнала ЛА к ТВС, равная средней величине квадрата Δt2.
- дисперсия временной синхронизации радиосигнала ЛА к ТВС, равная средней величине квадрата Δt2.
Используя выражения (4) и (5), получим выражение для дисперсии одновременной синхронизации радиосигнала ЛА по контрольному радиосигналу и ТВС.

Из выражения (6) определяется СКО синхронизации радиосигналов ЛА, принимаемых сенсорами, при одновременной временной привязке (синхронизации) при помощи контрольных радиосигналов и ТВС

Как следует из выражения (7), при условии  что для ТВС современных телевизионных центров выполняется на практике, и одновременной временной привязке (синхронизации) радиосигналов ЛА, принимаемых сенсорами, при помощи контрольного радиосигнала и ТВС СКО временной синхронизации радиосигналов ЛА уменьшается по сравнению с вариантом синхронизации только по контрольному радиосигналу.
что для ТВС современных телевизионных центров выполняется на практике, и одновременной временной привязке (синхронизации) радиосигналов ЛА, принимаемых сенсорами, при помощи контрольного радиосигнала и ТВС СКО временной синхронизации радиосигналов ЛА уменьшается по сравнению с вариантом синхронизации только по контрольному радиосигналу.
В частном идеализированном случае, когда величина  результирующая СКО синхронизации уменьшится в 2 раза (по сравнению с вариантом синхронизации только по контрольному радиосигналу)
результирующая СКО синхронизации уменьшится в 2 раза (по сравнению с вариантом синхронизации только по контрольному радиосигналу)
Для наиболее вероятной практической ситуации, когда  СКО уменьшится в ~1,41 раза
СКО уменьшится в ~1,41 раза
Таким образом, использование ТВС в дополнение к синхронизации от контрольного радиосигнала значительно уменьшает ошибку (погрешность) синхронизации радиосигналов ЛА, принимаемых сенсорами, и поэтому соответственно пропорционально уменьшает ошибку измерения координат ЛА в МПСН.
Введение в заявляемую МПСН приема и использования телевизионных сигналов путем введения в каждый из N сенсоров 1 частотно-разделительного устройства 12, состоящего из параллельно включенных ФВЧ 17 и ФНЧ 18, приемника ТВС 14, дополнительного АЦП 15, формирователя строба управления 13 и коммутатора 16 для дополнительной относительной временной синхронизации сенсоров 1, повышающей надежность работы и точностные характеристики МПСН, не использовались ни в одной из известных МПСН для определения местоположения ЛА.
Такая совокупность отличительных признаков отсутствует и в аналогах, и в прототипе, что доказывает соответствие предложенной МПСН критерию «новизна».
Таким образом, при анализе уровня техники не выявлены объекты, имеющие такую же совокупность признаков, как и заявляемое изобретение, а, следовательно, оно является новым.
Изобретательский уровень предложенной МПСН подтверждается тем, что в результате поиска не выявлены МПСН, имеющие признаки, совпадающие с отличительными признаками данного изобретения. Все прослеживаемые направления совершенствования МПСН, отраженные в известной научно-технической литературе, связаны с использованием временной синхронизации при помощи общих часов или сигналов единого времени GPS и ГЛОНАСС или сигналов, поступающих от внешнего передатчика контрольных радиосигналов. Это означает, что заявляемое изобретение не вытекает явным образом из известного уровня техники, а значит, имеет изобретательский уровень.
Пример конкретного осуществления составных частей МПСН. В качестве сенсора 1, содержащего приемную антенну 4, приемник 5, АЦП 6 и местные часы 3, может быть использована приемная станция серийной интегрированной МПСН «Альманах» [2], производимая Научно-производственным предприятием (НПП) «ЦРТС», в качестве сервера 2 может быть использован сервер обработки МПСН «Альманах» [2], производимый НПП «ЦРТС», в качестве передатчика контрольного радиосигнала 8 может быть использована передающая станция МПСН «Альманах» [2] или малогабаритный передатчик «ГНОМ» [3], производимые ООО «НПП «ЦРТС», а также самолетный ответчик СО-2010 [4], производимый Институтом авиационного приборостроения (АО «Навигатор»).
Другие составные части предлагаемой МПСН могут представлять собой соответствующие функциональные блоки и функциональные элементы МПСН «Альманах», производимые НПП «ЦРТС», а также имеющиеся в продаже соответствующие стандартные функциональные блоки или стандартные функциональные элементы, серийно изготавливаемые и поставляемые различными производителями и компаниями.
Так фильтр высоких частот 17 и фильтр нижних частот 18, образующие ЧРУ 12, могут быть реализованы при помощи микросхем соответственно SALF-680+ и ТНР-1050+ производителя Mini-Circuits [5], формирователь строба управления 13 и коммутатор 16 могут быть реализованы на программируемой логической интегральной схеме (ПЛИС) типа «Cyclone IV» компании производителя «Altera» [6], приемник 5 и приемник ТВС 14 могут быть реализованы при помощи модуля широкополосного программно управляемого приемника типа AD9361 [7] или типа AD9371 [8] компании производителя «Analog Devices», подключаемого к модулю цифровой обработки сигналов соответственно типа ZedBoard Zynq-7000 ARM/FPGA SoC Development Board [9] компании производителя «Digilent. A National Instruments Company» или типа Xilinx Zynq-7000 SoC ZC706 Evaluation Kit компании производителя Xilinx [10], местные часы 3 - при помощи генератора тактовых сигналов на микросхеме типа LTC6952 (AD9544) или прямого цифрового синтеза сигналов на микросхеме типа AD9912 компании производителя «Analog Devices» [11].
Таким образом, заявляемое изобретение является промышленно применимым. Кроме управления воздушным движением изобретение может использоваться в других отраслях промышленности, где требуется определение местоположения источников радиоизлучения в пространстве: морская, наземная и воздушная радионавигация, топография, геологоразведка и т.п. Оно обладает преимуществами перед известными техническим решениями, состоящими в повышении достоверности обнаружения и точностных характеристик измерения параметров положения источников радиоизлучения, что обуславливает его технико-экономическую эффективность.
Литература
1. National Aerospace Laboratory NLR (2005), NLR-CR-2004-472, Wide Area Multilateration, Report on EATMP TRS 131/04, Version 1.1 [Электронный ресурс]. URL:https://ext.eurocontrol.int/lexicon/index.php/Wide_area_multilateration#Definition_Source/_ (дата обращения: 25.10.2019); URL:https://docplayer.net/50791604-Wide-area-multilateration-report-on-eatmp-trs-131-04-version-1-1.html (дата обращения: 25.10.2019)
2. «Альманах» - интегрированная много позиционная система наблюдения в аэродромной и трассовой зонах [Электронный ресурс]. URL:http://www,npp-crts.ru/production/multilateratsiya/almanakh/ (дата обращения: 25.10.2019)
3. «ГНОМ» - малогабаритный передатчик АЗНВ [Электронный ресурс]. URL:http://www.npp-crts.ru/production/aznv/gnom/ (дата обращения: 25.10.2019)
4. Самолетный ответчик СО-2010 [Электронный ресурс]. URL:https://navigat.ru/products/samoletnye-otvetchiki/so-2010/ (дата обращения: 25.10.2019)
5. Mini-circuits [Электронный ресурс]. URL:https://www.minicircuits.com/ (дата обращения: 25.10.2019)
6. Intel FPGA Cyclone [Электронный ресурс]. URL:https://www.intel.ru/content/www/ru/ru/products/programmable/cyclone-series.html (дата обращения: 25.10.2019)
7. Описание AD9361 [Электронный ресурс]. URL:https://www.analog.com/en/products/ad9361.html#product-overview (дата обращения: 25.10.2019)
8. Описание AD9371 [Электронный ресурс]. URL:https://www.analog.com/en/products/ad9371.html (дата обращения: 25.10.2019)
9. ZedBoard Zynq-7000 ARM/FPGA SoC Development Board [Электронный ресурс]. URL:https://store.digilentinc.com/zedboard-zynq-7000-arm-fpga-soc-development-board/ (дата обращения: 25.10.2019)
10. Xilinx Zynq-7000 SoC ZC706 Evaluation Kit [Электронный ресурс]. URL:https://www.xilinx.com/products/boards-and-kits/ek-z7-zc706-g.html (дата обращения: 25.10.2019)
11. Analog Devices продукты «Тактовый сигнал и синхронизация» [Электронный ресурс]. URL: https://www.analog.com/ru/products/clock-and-timing.html (дата обращения: 25.10.2019).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оповещения населения, система оповещения населения для реализации этого способа и радиоприемное устройство для реализации этого способа | 2018 |
|
RU2697823C1 |
| КОМПЛЕКСИРОВАННЫЙ УНИВЕРСАЛЬНЫЙ ВСЕПОГОДНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ПОСАДКИ ВОЗДУШНОГО СУДНА И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2441203C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕДОПУСТИМОЙ АНОМАЛИИ ПРИНИМАЕМЫХ СИГНАЛОВ НАВИГАЦИОННЫХ СПУТНИКОВ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2393504C1 |
| СТАНЦИЯ СПУТНИКОВОЙ СВЯЗИ КОНТЕЙНЕРНОГО ИСПОЛНЕНИЯ | 2011 |
|
RU2455769C1 |
| Способ измерения азимутальной диаграммы направленности антенны в составе наземных подвижных объектов больших размеров и устройство для его осуществления | 2016 |
|
RU2638079C1 |
| Способ измерения коэффициента отражения радиосигналов УКВ (ДМВ) от земной поверхности в задачах лётных испытаний авиационных радиосистем | 2024 |
|
RU2836591C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАКСИМАЛЬНО ПРИМЕНИМОЙ ЧАСТОТЫ ДЛЯ ИОНОСФЕРНОЙ РАДИОСВЯЗИ | 2012 |
|
RU2516239C2 |
| Базовая станция дистанционного зондирования атмосферы | 2015 |
|
RU2611587C1 |
| Способ, реализующий точную помехоустойчивую синхронизацию опорных станций локальной навигационной системы | 2023 |
|
RU2827095C1 |
| УСТРОЙСТВО МАСКИРОВКИ И ДЕМАСКИРОВКИ ТЕЛЕВИЗИОННОГО СИГНАЛА ИЗОБРАЖЕНИЯ | 1991 |
|
RU2014746C1 |
Изобретение относится к области управления полетами летательных аппаратов (ЛА) и может быть применено в многопозиционных системах наблюдения воздушного пространства, используемых для управления полетами ЛА на трассе движения и в районе аэродромов. Техническим результатом изобретения является повышение точности и надежности многопозиционной системы наблюдения (МПСН). Каждый из N идентичных приемных сенсоров МПСН дополнительно содержит частотно-разделительное устройство (ЧРУ), приемник телевизионного сигнала (ТВС), дополнительный АЦП, формирователь строба управления и коммутатор. Вход ЧРУ подключен к выходу приемной антенны и состоит из объединенных входов параллельно включенных фильтра высоких частот (ФВЧ) и фильтра нижних частот (ФНЧ). Выход ФВЧ подключен ко входу приемника и является первым выходом ЧРУ. Вход приемника ТВС подключен к выходу ФНЧ, являющемуся вторым выходом ЧРУ. Сигнальный вход дополнительного АЦП подключен к выходу приемника ТВС. К выходу местных часов подключены тактирующий вход дополнительного АЦП и вход формирователя строба управления. Первый (сигнальный) вход коммутатора подключен к выходу АЦП, второй (сигнальный) вход - к выходу дополнительного АЦП, третий (управляющий) вход - к выходу формирователя строба управления, а выход является выходом сенсора. 1 з.п. ф-лы, 4 ил.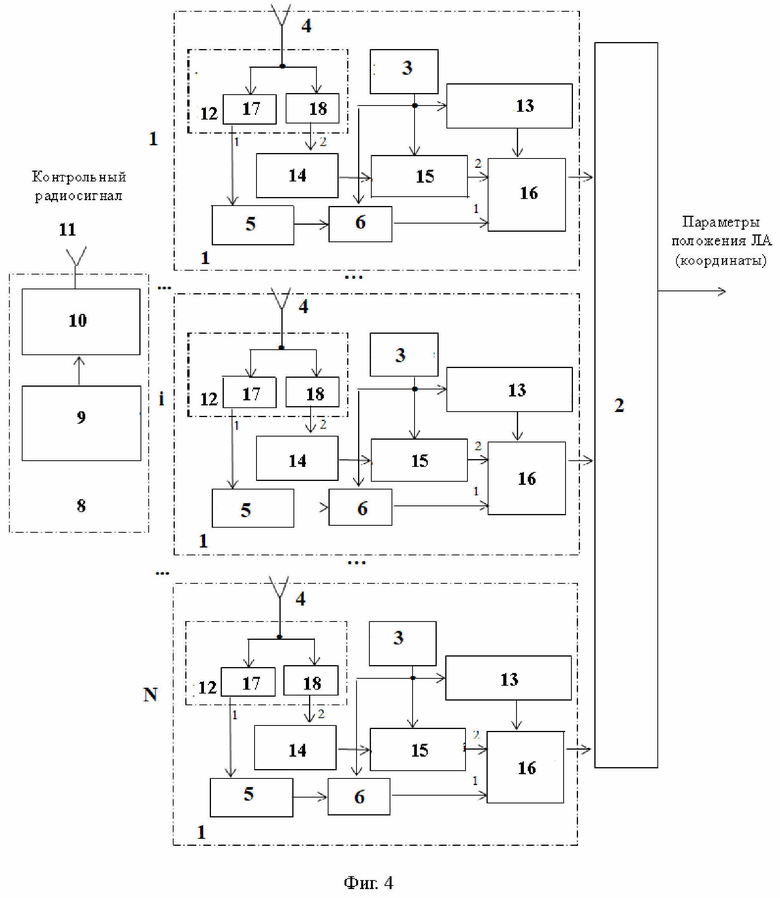
1. Многопозиционная система наблюдения, содержащая N идентичных приемных сенсоров, каждый из которых содержит приемник, приемную антенну, аналого-цифровой преобразователь (АЦП) и местные часы, сервер, N входов которого подключены к выходам соответствующих N сенсоров, а также передатчик контрольного радиосигнала, содержащий последовательно включенные формирователь контрольного радиосигнала и передающее устройство с передающей антенной, отличающаяся тем, что в каждый из N идентичных приемных сенсоров дополнительно включены частотно-разделительное устройство (ЧРУ), подключенное входом к выходу приемной антенны и состоящее из параллельно включенных фильтра высоких частот (ФВЧ) и фильтра нижних частот (ФНЧ), объединенные входы которых являются входом ЧРУ, выход ФВЧ подключен ко входу приемника и является первым выходом ЧРУ, приемник телевизионного сигнала (ТВС), вход которого подключен к выходу ФНЧ, являющемуся вторым выходом ЧРУ, дополнительный АЦП, сигнальный вход которого подключен к выходу приемника ТВС, а тактирующий вход - к выходу местных часов, формирователь строба управления, вход которого подключен к выходу местных часов, и коммутатор, первый сигнальный вход которого подключен к выходу АЦП, второй сигнальный вход – к выходу дополнительного АЦП, третий управляющий вход – к выходу формирователя строба управления, а выход является выходом сенсора.
2. Многопозиционная система наблюдения по п.1, отличающаяся тем, что количество N идентичных приемных сенсоров не менее трех.
| Способ укладки кабеля, питающего подвижной электроагрегат и устройство для осуществления этого способа | 1957 |
|
SU115592A1 |
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| УЛЬТРАШИРОКОПОЛОСНАЯ СВЯЗЬ ЧЕРЕЗ ПРОВОДНУЮ СРЕДУ | 2003 |
|
RU2325030C2 |
| US 2002170064 A1, 14.11.2002 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ ЯЧЕИСТЫХ КЕРАМИЧЕСКИХИЗДЕЛИЙ | 0 |
|
SU210735A1 |
| US 9699607 B2, 04.07.2017 | |||
| US 8063825 B1, 22.11.2011 | |||
| US 10578704 B1, 03.03.2020 | |||
| NEVEN W.H.L., QUILTER T.J., WEEDON R., HOGENDOORN R.A | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

