Изобретения относятся к технике антенных измерений и могут быть использованы для наземных измерений азимутальной диаграммы направленности (ДН) антенн радиосвязного и радионавигационного оборудования в составе подвижных объектов больших размеров, в том числе летательных аппаратов (ЛА).
Современные технологии измерения ДН антенн используют два основных подхода. Первый из них основан на измерениях электромагнитного поля в ближней зоне антенны  (D - максимальный размер апертуры антенны, λ - рабочая длина волны) с преобразованием результатов измерений и получением оценок ДН, соответствующих дальней зоне (И.Ю. Данилов. «Разработка методов и средств контроля элементов антенных систем перспективных космических аппаратов» - диссертация на соискание ученой степени кандидата технических наук, ФГБОУ ВО, КАИ им. А.Н. Туполева, Казань, 2016 г.).
(D - максимальный размер апертуры антенны, λ - рабочая длина волны) с преобразованием результатов измерений и получением оценок ДН, соответствующих дальней зоне (И.Ю. Данилов. «Разработка методов и средств контроля элементов антенных систем перспективных космических аппаратов» - диссертация на соискание ученой степени кандидата технических наук, ФГБОУ ВО, КАИ им. А.Н. Туполева, Казань, 2016 г.).
Методы ближней зоны особенно эффективны при оценке параметров на этапах создания остронаправленных антенн и при измерениях параметров антенн на масштабных моделях (K.J. Keeping, J.С. Surcau. Scale Model Pattern Measurements of Aircraft L-band Beacon Antenna. Lincoln Laboratory MIT, Lecsington, Massachusetts, 1975 г.). Использование технологии ближней зоны при измерении ДН слабонаправленных антенн радиосвязного и радионавигационного оборудования в составе объекта больших габаритов, труднореализуема по принципу измерений и нецелесообразна по экономическим соображениям.
Измерения ДН в дальней зоне выполняют на дальностях  , при этом на результат измерения влияют искажающие факторы. Наибольшее влияние, при измерении параметров слабонаправленных антенн, оказывают отражения тестового радиосигнала от подстилающей поверхности и других объектов, находящихся в зоне между исследуемой и измерительной антеннами. Для уменьшения их влияния используют различные методы и технические средства: «наклонный полигон», интерферометры, установку поглощающих и отражающих щитов на трассе между антеннами, методы модуляции тестового радиосигнала, которые не являются универсальными и обеспечивают уменьшение амплитуды отраженной волны для конкретных схем измерений, реализация которых требует выполнения дорогостоящих проектных и строительных работ. Antenna Radiation Pattern Measurements. Air Force Research Laboratory, Newport, NY, 88ABW-2012-4090, 2012 г.
, при этом на результат измерения влияют искажающие факторы. Наибольшее влияние, при измерении параметров слабонаправленных антенн, оказывают отражения тестового радиосигнала от подстилающей поверхности и других объектов, находящихся в зоне между исследуемой и измерительной антеннами. Для уменьшения их влияния используют различные методы и технические средства: «наклонный полигон», интерферометры, установку поглощающих и отражающих щитов на трассе между антеннами, методы модуляции тестового радиосигнала, которые не являются универсальными и обеспечивают уменьшение амплитуды отраженной волны для конкретных схем измерений, реализация которых требует выполнения дорогостоящих проектных и строительных работ. Antenna Radiation Pattern Measurements. Air Force Research Laboratory, Newport, NY, 88ABW-2012-4090, 2012 г.
Среди способов измерения ДН слабонаправленных антенн наземных объектов больших размеров в дальней зоне наибольшее распространение получили способы облета и вышки.
Известны «Способ измерения диаграммы направленности приемной антенны», (Патент на изобретение №1778714, опубл. 30.11.1992 г.) и «Способ измерения диаграммы направленности диапазонной антенны», (Патент на изобретение №1804627, опубл. 23.03.1993 г.), которые относятся к облетным способам измерений ДН наземных антенн и включают излучение сигнала на каждой частоте рабочего диапазона с борта ЛА, совершающего полет в дальней зоне исследуемой антенны по заданной траектории, прием сигнала исследуемой и опорной антеннами, одновременное измерение амплитуд принятого сигнала и координат ЛА относительно исследуемой антенны и определение ее ДН на каждой из частот рабочего диапазона по результатам измерений уровней радиосигнала, вычисление и построение ДН.
Основными недостатками облетных способов являются использование сложных технических решений с организацией дополнительного сверхвысокочастотного (СВЧ) радиоканала, а также высокие трудоемкость и стоимость проведения измерений с использованием вспомогательного ЛА.
Известен также метод измерения диаграмм направленности антенн ЛА в наземных условиях «Типовая методика испытаний антенно-фидерных устройств бортового оборудования, установленного на воздушных судах ГА», ГосНИИ «Аэронавигация», ЛИИ им. М.М. Громова, М., 1994 г., затраты на эксперимент в котором существенно снижены, по сравнению с методом облета, за счет использования оператора для перемещения измерительной антенны, по размеченной круговой траектории, вокруг ЛА на аттестованной измерительной площадке. Недостатком метода является необходимость использования специальной калиброванной площадки, высокая трудность реализации измерений угловых положений измерительной антенны с шагом по азимуту ≤10° и сложность учета совместного влияния на уровень принятого сигнала отражений от земли и элементов конструкции фюзеляжа ЛА.
Наиболее близким к предлагаемому изобретению, относящемуся к способу измерения азимутальной диаграммы направленности антенны, является способ по патенту Российской Федерации №2298198, опубл. 27.04.2007 г.
Этот способ заключается в измерении на выбранной частоте азимутальных ДН исследуемой антенны и вспомогательной штыревой антенны, которые последовательно устанавливают на поворотное устройство, а измерительную антенну устанавливают на неподвижной вышке. Оценивают искомую ДН исследуемой антенны путем вычитания соответствующих значений уровней радиосигналов исследуемой и вспомогательной антенн.
К недостаткам способа прототипа относятся невозможность оценки ДН антенн при их испытаниях в составе объекта больших размеров, что обусловлено: сложностью создания поворотного устройства, реализующего вращение по азимуту объектов больших размеров и невозможностью замещения вспомогательной антенной всех испытываемых антенн объекта.
Известно устройство для измерения диаграммы направленности антенны методом облета, наиболее близкое к предлагаемому, (патент на изобретение №1309741, опубл. 27.11.1998 г.).
Это устройство содержит передатчик, исследуемую антенну, приемник, измерительную антенну, блок измерения дальности, блок регистрации и блок радиотехнической системы навигации, размещенный на борту самолета.
Основными недостатками устройства на основе методов облета являются использование сложных технических решений с организацией дополнительного радиоканала, а также высокие трудоемкость и стоимость проведения измерений с применением вспомогательного ЛА.
Предлагаемые изобретения направлены на достижение технического результата, заключающегося в повышении достоверности и точности оценки азимутальных ДН слабонаправленных радиосвязных и радионавигационных антенн в составе наземных подвижных объектов больших размеров (в том числе ЛА) в условиях открытых полигонов и сокращении затрат на испытания за счет использования для измерений участков полигонов однородной текстуры поверхности с произвольным коэффициентом отражения без их дополнительной подготовки (например, участка типовой взлетно-посадочной полосы (ВПП)).
Для получения указанного технического результата в предлагаемом способе измерения азимутальной диаграммы направленности антенны в составе наземных подвижных объектов больших размеров, включающем установку измерительной антенны на вышке, измерение на выбранной частоте азимутальных диаграмм направленности (ДН) исследуемой и вспомогательной антенн, последовательно устанавливаемых на поворотное устройство, дополнительно исследуемую антенну устанавливают на высоте h1 в составе подвижного объекта больших размеров. Измерение азимутальной диаграммы направленности исследуемой антенны обеспечивают путем перемещения объекта на измерительном участке открытого полигона с однородной структурой поверхности (например, типовой ВПП) вокруг выбранной точки (центра) по траектории, близкой к окружности небольшого радиуса (10…30 м). Тестовый радиосигнал заданной частоты, сформированный программируемым генератором (ПГР) и усиленный широкополосным усилителем мощности (ШУМ), излучают через испытываемую антенну объекта. При этом измеренные навигационной системой объекта истинный курс ψо, географическую широту ϕо, долготу λо, а также время (UTC) приемника GPS/ГЛОНАСС регистрирует система измерений объекта (СИО), а принимают измерительными антеннами ортогональной поляризации. Излученный антенной объекта радиосигнал при его движении по круговой траектории принимают измерительные антенны ортогональной поляризации, размещенные на высоте h1 телескопической мачты передвижного наземного измерительного пункта (НИП), который устанавливают неподвижно на расстоянии от  до
до  до центра круговой траектории объекта. Уровни принятых антеннами НИП радиосигналов измеряют анализатором спектра реального времени (АСРВ), результаты измерений совместно с географическими широтой ϕнип, долготой λнип и временем UTC его приемника GPS/ГЛОНАСС регистрируют в ЭВМ. Результаты регистрации параметров объекта и НИП объединяют по времени UTC в единой базе данных ЭВМ из состава НИП, объединенные данные пересчитывают к фиксированным (нормированным) координатам антенны объекта, в качестве которых принимают оценки средних значений географических координат объекта, измеренных в каждой точке его круговой траектории. Уровни напряженности радиосигнала Eri, измеренные на удалениях ri от антенн НИП, пересчитывают к уровням напряженности Eoi, соответствующим значению дальности r0 до центра круговой траектории с использованием математической модели изменения уровня радиосигнала от дальности, с учетом влияния отражений от поверхности измерительного участка полигона путем измерения значения коэффициента отражения γ0 поверхности измерительного участка, для чего перед измерением ДН антенны объекта в центре круговой траектории объекта на высоте h1 от уровня измерительной площадки устанавливают вспомогательную антенну, которая излучает тестовый радиосигнал заданной частоты. Принимают излучаемый радиосигнал антеннами НИП на фиксированном расстоянии
до центра круговой траектории объекта. Уровни принятых антеннами НИП радиосигналов измеряют анализатором спектра реального времени (АСРВ), результаты измерений совместно с географическими широтой ϕнип, долготой λнип и временем UTC его приемника GPS/ГЛОНАСС регистрируют в ЭВМ. Результаты регистрации параметров объекта и НИП объединяют по времени UTC в единой базе данных ЭВМ из состава НИП, объединенные данные пересчитывают к фиксированным (нормированным) координатам антенны объекта, в качестве которых принимают оценки средних значений географических координат объекта, измеренных в каждой точке его круговой траектории. Уровни напряженности радиосигнала Eri, измеренные на удалениях ri от антенн НИП, пересчитывают к уровням напряженности Eoi, соответствующим значению дальности r0 до центра круговой траектории с использованием математической модели изменения уровня радиосигнала от дальности, с учетом влияния отражений от поверхности измерительного участка полигона путем измерения значения коэффициента отражения γ0 поверхности измерительного участка, для чего перед измерением ДН антенны объекта в центре круговой траектории объекта на высоте h1 от уровня измерительной площадки устанавливают вспомогательную антенну, которая излучает тестовый радиосигнал заданной частоты. Принимают излучаемый радиосигнал антеннами НИП на фиксированном расстоянии  от вспомогательной антенны и при непрерывном изменении высоты установки измерительных антенн НИП в диапазоне от h2min до h2max производят регистрацию принятых этими антеннами уровней радиосигналов с выходов АСРВ на интервале нескольких периодов модуляции интерференционного множителя:
от вспомогательной антенны и при непрерывном изменении высоты установки измерительных антенн НИП в диапазоне от h2min до h2max производят регистрацию принятых этими антеннами уровней радиосигналов с выходов АСРВ на интервале нескольких периодов модуляции интерференционного множителя:

где  . λ - длина волны радиосигнала, излучаемого антенной объекта,
. λ - длина волны радиосигнала, излучаемого антенной объекта,
определяют максимальные  и минимальные
и минимальные  значения уровней модуляции измеренного радиосигнала и по формуле:
значения уровней модуляции измеренного радиосигнала и по формуле:
 .
.
Оценивают значения коэффициента отражения γ0 измерительной площадки, который учитывают при пересчете уровней напряженности поля Eri, измеренных на дальности ri к нормированным значениям Ei0, соответствующим дальности r0 до центра круговой траектории, по формуле:
 .
.
За нормированные значения курсовых углов принимают их оценки, полученные расчетным способом по значениям курса объекта, географических координат антенны объекта в каждой точке круговой траектории и географических координат НИП, при этом указанные преобразования выполняют в следующей последовательности:
- рассчитывают значения дальностей между НИП и условным центром круговой траектории объекта, а также между НИП и текущим положением объекта (приемника GPS/ГЛОНАСС) на круговой траектории ri по формулам:
r0=Parccos((sinϕ0sinϕНИП+cosϕ0cosϕНИПcos(λ0-λНИП))
ri=Parccos((sinϕ0isinϕНИП+cosϕ0icosϕНИПcos(λ0i-λНИП))
где P=6370,4912775 км;
ϕ0i, λ0i - измеренные приемником GPS/ГЛОНАСС географические координаты круговой траектории объекта;
ϕНИП, λНИП - измеренные географические координаты НИП;
 ,
,  - оценки географических координат центра круговой траектории объекта;
- оценки географических координат центра круговой траектории объекта;
- рассчитывают текущие значения курсового угла НИП αкуНИП в системе координат объекта по измеренным значениям географическим координатам НИП, текущих географических координат и курса объекта при его движении по круговой траектории по формулам:

где 
азимутальный угол НИП относительно объекта;
ψо - курс объекта;
- при несовпадении координат антенны объекта с координатами антенны приемника GPS/ГЛОНАСС вводят скорректированные текущие координаты rik и αкуНИПk по формулам


где хао и zao координаты антенны в связанной системе координат объекта с началом, совпадающим с координатами антенны приемника GPS/ГЛОНАСС.
Полученные оценки нормированных значений уровня радиосигнала для соответствующих значений курсового угла НИП в системе координат объекта, принимают за оценку азимутальной ДН антенны объекта, которую в виде параметрической зависимости Eoi=ƒ(αкуНИП) отображают графически в линейных или полярных координатах, в линейном или логарифмическом масштабах. Вычисляют разности в дБ нормированных оценок соответствующих уровней радиосигналов ортогональных поляризаций при каждом угловом положении объекта на круговой траектории, которые определяют степень подавления сигнала ортогональной поляризации относительно сигнала основной поляризации при всех значениях курсового угла принятого радиосигнала.
Кроме того, для повышения точности пересчета измеренного уровня радиосигнала, излучаемого антенной объекта и принимаемого антеннами НИП к нормированному значению, выполняют уточнение (оптимизацию) параметров уравнения зависимости уровня принимаемого сигнала от дальности:
 ,
,
с учетом полной математической модели интерференционного множителя (1), в котором оптимальные значения Е0опт и γопт определяют методом пошагового (итерационного) уточнения оценок измеренных параметров γ0 и Е0 по критерию минимума среднеквадратической погрешности аппроксимации уравнением (4) результатов измерения зависимости уровня радиосигнала от дальности, которые получают путем излучения радиосигнала заданной частоты через вспомогательную антенну, установленную в центре круговой траектории объекта на высоте h1, приема излучаемого радиосигнала измерительными антеннами НИП, подключенными к АСРВ, перемещения НИП по прямолинейной траектории от точки установки вспомогательной антенны до удаления  с регистрацией уровня сигнала с выхода АСРВ в ЭВМ из состава НИП.
с регистрацией уровня сигнала с выхода АСРВ в ЭВМ из состава НИП.
Затем выполняют повторную обработку и пересчет уровней напряженности поля Eri измеренным на дальности ri, к нормированным значениям Ei0, соответствующим дальности r0 по формуле (3), с уточненным значением параметра γ0=γопт

Полученные уточненные оценки нормированных значений уровня радиосигнала Eiопт для соответствующих значений αкуНИП курсового угла НИП, в связанной системе координат объекта, принимают за оптимальную оценку азимутальной ДН антенны объекта, а разности значений уровней в дБ нормированных оценок соответствующих радиосигналов принятых антеннами НИП при каждом значении курсового угла антенны объекта, - за оптимальную оценку степени подавления сигнала основной поляризации, сигналом ортогональной поляризации. При этом погрешность пересчета (приведения) уровня радиосигнала к нормированным условиям с использованием уравнения (5) в диапазоне дальностей  не превышает погрешности пересчета, с использованием квадратичной формулы Б.А. Введенского, на дальностях
не превышает погрешности пересчета, с использованием квадратичной формулы Б.А. Введенского, на дальностях  , что, при прочих равных условиях, обеспечивает уменьшение размера измерительной площадки открытого полигона, выигрыш в отношении сигнал/шум измерительного канала не менее 25 дБ и позволяет использовать широкополосные усилители малой мощности в составе объекта для измерения ДН его антенн.
, что, при прочих равных условиях, обеспечивает уменьшение размера измерительной площадки открытого полигона, выигрыш в отношении сигнал/шум измерительного канала не менее 25 дБ и позволяет использовать широкополосные усилители малой мощности в составе объекта для измерения ДН его антенн.
Для достижения указанного технического результата предлагаемое устройство, в отличие от известного, содержит исследуемую антенну, установленную на подвижном объекте больших размеров, который размещен на измерительном участке открытого полигона, антенна установлена на высоте h1 от его поверхности и подключена к выходу передатчика - источнику радиосигнала, излучаемого через эту антенну при вращении по азимуту за счет перемещения объекта по круговой траектории малого радиуса, и включающего программируемый генератор радиосигналов (ПГР) и широкополосный усилитель мощности (ШУМ). Выход ПГР через ШУМ связан с входом антенны объекта, второй выход ПГР и выходы штатной системы измерения истинного курса и географических координат объекта, а также выход его приемника GPS/ГЛОНАС подключены к входам системы измерения объекта (СИО). Радиосигналы, излученные антенной объекта, принимают две измерительные антенны ортогональной поляризации передвижного наземного измерительного пункта (НИП), антенны НИП установлены на телескопической мачте с изменяемой высотой установки, выход антенн подключен к входу АСРВ, выходы АСРВ и приемника GPS/ГЛОНАСС НИП подключены через интерфейсы к его ЭВМ управления и регистрации, синхронизацию результатов измерений СИО и НИП реализуют в процедуре слияния данных ЭВМ НИП по единому времени UTC их приемников GPS/ГЛОНАСС.
Кроме того, в центре круговых траекторий на высоте h1 от поверхности измерительного участка дополнительно установлена вспомогательная антенна для излучения тестового радиосигнала при измерении коэффициента отражения поверхности измерительного участка и зависимости уровня радиосигнала от дальности, вспомогательная антенна подключена к выходу ШУМ, вход которого соединен с выходом ПГР, которые совместно с автономным источником электропитания установлены в непосредственной близости от вспомогательной антенны.
Предлагаемые изобретения поясняются следующими чертежами, на которых изображены:
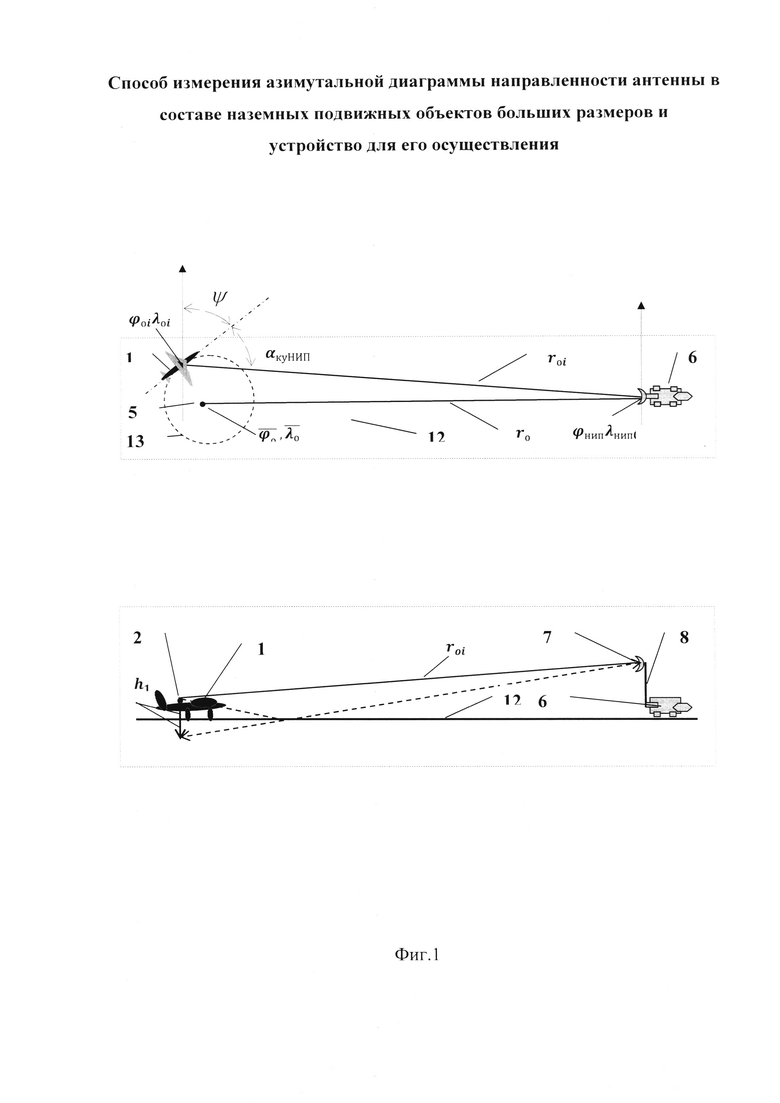
на фиг. 1(a), (б) - схема расположения антенны объекта и антенн НИП при измерении ДН антенны объекта на выбранном измерительном участке открытого полигона: (а) - вид сверху; (б) - вид сбоку;
на фиг. 2 - схема расположения вспомогательной антенны и антенн НИП при измерении фактических значений коэффициента отражения γ0, уровня напряженности радиосигнала Е0 и зависимости уровня радиосигнала, излучаемого антенной объекта, от дальности до нее;
на фиг. 3 - структурная схема устройства измерения азимутальной диаграммы направленности антенны в составе наземных подвижных объектов больших размеров;
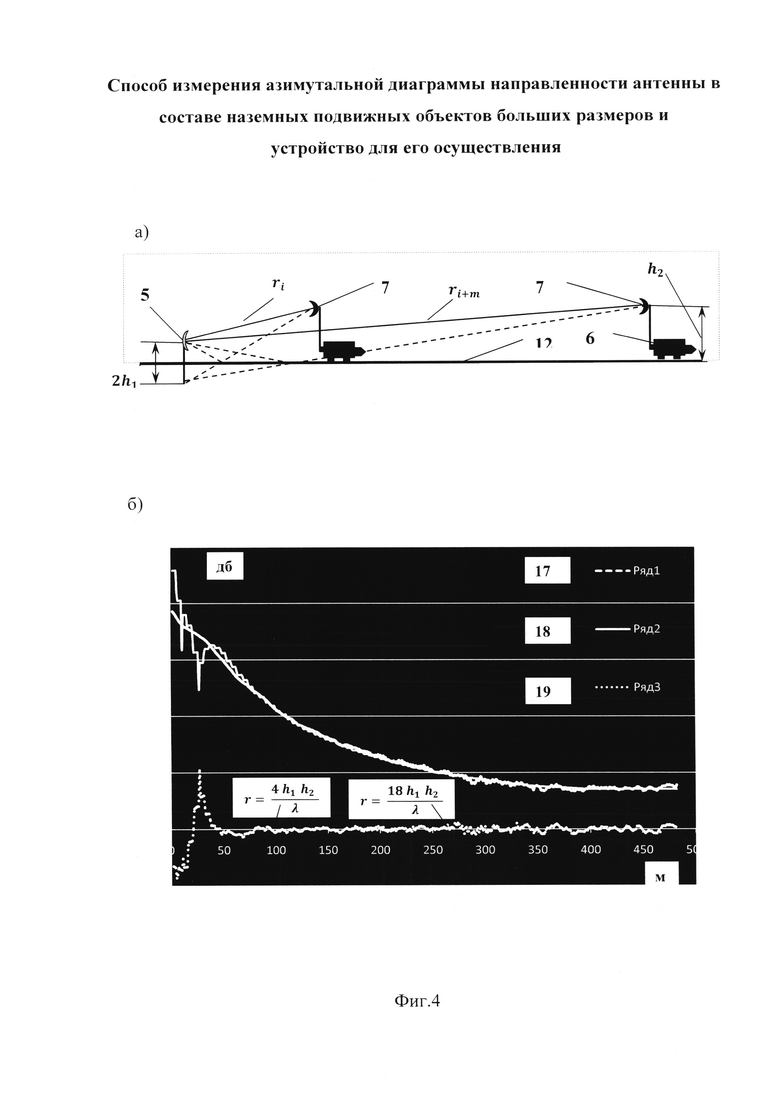
на фиг. 4(a), (б) - результат уточнения (оптимизации) параметров математической модели зависимости уровня радиосигнала от дальности, включающего полное уравнение множителя отражения по экспериментальной зависимости уровня радиосигнала от дальности: а) - схема проведения эксперимента; б) - графики экспериментальных измерений, математической модели аппроксимации и оценки погрешности, пересчета (приведения) измеренных значений уровня радиосигнала к нормированному значению дальности.
Предлагаемое устройство для измерения азимутальной диаграммы направленности антенны в составе наземных подвижных объектов больших размеров содержит установленную на подвижном объекте (на борту самолета) 1 больших размеров, размещенным на измерительном участке открытого полигона, исследуемую антенну 2, подключенную к передатчику - источнику радиосигнала, излучаемого через эту антенну при вращении по азимуту, и измерительную антенну 7, размещенную на передвижном наземном измерительном пункте (НИП) 6 (фиг. 1а, б).
Вход антенны объекта 2 подключен к выходу передатчика, выполненного с последовательно связанными широкополосным усилителем мощности (ШУМ) 3, программируемым генератором радиосигналов (ПРГ) 4. Выходы штатной системы измерения навигационных параметров объекта и его приемника GPS/ГЛОНАС 17 подключены к входам системы измерения географических координат объекта (СИО) 14 для регистрации истинного курса и времени (UTC) приемника GPS/ГЛОНАС (фиг. 3). Измерительная антенна 7 размещена на передвижном наземном измерительном пункте (НИП) 6. Объект перемещают по близкой к круговой траектории небольшого радиуса (не более 30 м) с излучением радиосигналов в рабочем диапазоне частот антенны объекта, НИП 6 обеспечивает прием излучаемых антенной объекта радиосигналов на две измерительные антенны ортогональной поляризации 7, антенны установлены на телескопической мачте 8 с изменяемой высотой их установки, выход антенн подключен к входу анализатора спектра реального времени (АСРВ) 9, а выходы АСРВ и приемника GPS/ГЛОНАСС подключены через интерфейсы к приемнику ЭВМ 11 управления и регистрации НИП, результаты, зарегистрированные системами измерений объекта СИО 14 и НИП 6, синхронизируют по времени UTC приемников GPS/ГЛОНАСС из состава подвижного объекта и НИП при их объединении в ЭВМ из состава НИП. В центре круговых траекторий на высоте h1 от поверхности измерительного участка дополнительно установлена вспомогательная антенна 5, которая подключена к выходу широкополосного усилителя мощности, вход которого соединен с выходом программируемого генератора радиосигналов, которые совместно с источником электропитания размещены в непосредственной близости от вспомогательной антенны (фиг. 3).
Предлагаемый способ осуществляют в следующей последовательности.
На открытом полигоне выбирают измерительный участок 12 с однородной структурой поверхности для перемещения объекта 1 по траекториям, близким к круговым радиусам от 10 м до 30 м и линейного перемещения НИП относительно центра круговых траекторий 13 в диапазоне дальностей от 0 до  .
.
В центре круговых траекторий 13 на высоте h1 от поверхности измерительного участка 12 (соответствует высоте установки антенны объекта 2) устанавливают вспомогательную антенну 5, к которой подключают ШУМ 3, сопряженный с ПГР 4, в котором программируют значения испытательных частот антенны объекта 2, и через вспомогательную антенну 5 излучают радиосигнал, усиленный ШУМ 3. До начала измерений ДН испытываемой антенны на фиксированном расстоянии  от вспомогательной антенны 5 устанавливают НИП 6, к его антеннам 7 подключают АСРВ 9, который измеряет уровень принятого антеннами 7 радиосигнала, измеренный АСРВ 9 радиосигнал регистрируют на интервале формирования нескольких периодов интерференционного множителя отражения
от вспомогательной антенны 5 устанавливают НИП 6, к его антеннам 7 подключают АСРВ 9, который измеряет уровень принятого антеннами 7 радиосигнала, измеренный АСРВ 9 радиосигнал регистрируют на интервале формирования нескольких периодов интерференционного множителя отражения  (1) путем изменения высоты установки антенн 7 в диапазоне от h2min до h2max. Оценивают максимальный Eh2max и минимальный Eh2min уровни модуляции интерференционного множителя отражения поверхности измерительного участка 12, и по формулам (2) и (3) определяют значения коэффициента отражения и уровня напряженности радиосигнала на удалении rγ (фиг. 2), 15 - модуляционная кривая множителя отражения, 16 - зависимость уровня сигнала излучаемого антенной объекта от дальности с учетом полной математической модели множителя отражения.
(1) путем изменения высоты установки антенн 7 в диапазоне от h2min до h2max. Оценивают максимальный Eh2max и минимальный Eh2min уровни модуляции интерференционного множителя отражения поверхности измерительного участка 12, и по формулам (2) и (3) определяют значения коэффициента отражения и уровня напряженности радиосигнала на удалении rγ (фиг. 2), 15 - модуляционная кривая множителя отражения, 16 - зависимость уровня сигнала излучаемого антенной объекта от дальности с учетом полной математической модели множителя отражения.
Выполняют линейное перемещение НИП 6 относительно вспомогательной антенны 5 в диапазоне дальностей от 0 до  , измеряют АСРВ 9 уровни сигнала, принятого антеннами 7, и регистрируют их совместно с текущими географическими координатами приемника GPS/ГЛОНАСС 10 в ЭВМ 11 (фиг. 4а). Измеренную зависимость уровня напряженности поля радиосигнала, излучаемого вспомогательной антенной 5, от дальности до нее используют для оптимизации оценок параметров математической модели в указанном диапазоне дальностей. Оптимальные значения γопт и Е0опт определяют методом пошагового уточнения их экспериментальных оценок γ0 и по критерию минимума среднеквадратической погрешности аппроксимации. Результаты оптимизации используют для приведения изменений уровня радиосигнала, обусловленных изменением дальности между антенной объекта 2 и антеннами НИП 7 при движении объекта 1 по круговой траектории 13, к нормированным значениям.
, измеряют АСРВ 9 уровни сигнала, принятого антеннами 7, и регистрируют их совместно с текущими географическими координатами приемника GPS/ГЛОНАСС 10 в ЭВМ 11 (фиг. 4а). Измеренную зависимость уровня напряженности поля радиосигнала, излучаемого вспомогательной антенной 5, от дальности до нее используют для оптимизации оценок параметров математической модели в указанном диапазоне дальностей. Оптимальные значения γопт и Е0опт определяют методом пошагового уточнения их экспериментальных оценок γ0 и по критерию минимума среднеквадратической погрешности аппроксимации. Результаты оптимизации используют для приведения изменений уровня радиосигнала, обусловленных изменением дальности между антенной объекта 2 и антеннами НИП 7 при движении объекта 1 по круговой траектории 13, к нормированным значениям.
На объекте устанавливают ПГР 4 и ШУМ 3, программируют значения измерительных частот из рабочего диапазона антенны объекта 2, выход ПГР 4 подключают к входу ШУМ 3, а выход ШУМ 3 соединяют с входом антенны объекта 2, включают ПГР 4 на излучение в программном режиме. Объект 1 перемещают на измерительном участке 12 по круговой траектории 13, с помощью СИО 14 регистрируют курс (ψ), географические широту (ϕ), долготу (λ) и время UTC приемника GPS/ГЛОНАСС 10. На фиксированной дальности от цента круговых траекторий 13 объекта 1 устанавливают НИП 6, значение дальности выбирают с учетом возможностей измерительного участка полигона из диапазона от  до
до  , фиксируют (регистрируют) его географические широту (ϕ) и долготу (λ), которые измеряют приемником GPS/ГЛОНАСС 10. Радиосигналы, излучаемые антенной объекта 2, принимают измерительные антенны 7 НИП, подключенные к АСРВ 9, который измеряет уровни радиосигналов на всех излучаемых частотах и передает их в ЭВМ 11 для регистрации совместно с временем UTC приемника GPS/ГЛОНАСС 10 при движении объекта 1 по круговой траектории 13. Оператор НИП 6 для повышения достоверности измерений выполняет оперативный контроль частотной панорамы АСРВ 9 и фиксирует наличие мешающих радиосигналов на выбранных для измерений частотах для исключения таких результатов из обработки. Зарегистрированные СИО 14 и ЭВМ НИП 11 данные объединяют в базе данных ЭВМ НИП 11 на основе единого времени UTC. Объединенные данные обрабатывают по алгоритмам приведения результатов измерения ДН к нормированным условиям (2), строят графические диаграммы направленности исследуемой антенны и оценивают степень подавления ортогонального сигнала излучаемого антенной объекта.
, фиксируют (регистрируют) его географические широту (ϕ) и долготу (λ), которые измеряют приемником GPS/ГЛОНАСС 10. Радиосигналы, излучаемые антенной объекта 2, принимают измерительные антенны 7 НИП, подключенные к АСРВ 9, который измеряет уровни радиосигналов на всех излучаемых частотах и передает их в ЭВМ 11 для регистрации совместно с временем UTC приемника GPS/ГЛОНАСС 10 при движении объекта 1 по круговой траектории 13. Оператор НИП 6 для повышения достоверности измерений выполняет оперативный контроль частотной панорамы АСРВ 9 и фиксирует наличие мешающих радиосигналов на выбранных для измерений частотах для исключения таких результатов из обработки. Зарегистрированные СИО 14 и ЭВМ НИП 11 данные объединяют в базе данных ЭВМ НИП 11 на основе единого времени UTC. Объединенные данные обрабатывают по алгоритмам приведения результатов измерения ДН к нормированным условиям (2), строят графические диаграммы направленности исследуемой антенны и оценивают степень подавления ортогонального сигнала излучаемого антенной объекта.
Таким образом, заявленный способ измерения азимутальной ДН антенны в составе подвижного объекта больших размеров и устройство для его осуществления в условиях открытых полигонов обеспечивает:
- проведение измерений азимутальных ДН антенн в составе больших объектов с использованием измерительных участков относительно небольших размеров с однородной структурой поверхности (например, участок ВПП) без их специальной подготовки;
- необходимую точность измерений уровня радиосигнала, путем его приведения к нормированным условиям, при движении объекта по круговой траектории на дальностях между центром круговой траектории и НИП в диапазоне от  до
до  , на основе оптимальной математической модели зависимости уровня радиосигнала от дальности, включающей полное уравнение множителя ослабления;
, на основе оптимальной математической модели зависимости уровня радиосигнала от дальности, включающей полное уравнение множителя ослабления;
- проведение измерений на дальностях, в 4,5 раза меньших нижней границы применимости квадратичной формулы Б.А. Введенского  , снижает требования к размеру измерительного участка, энергетическому потенциалу измерительного радиоканала (НИП - объект) до 25 дБ и позволяет использовать для усиления тестового радиосигнала ШУМ малой мощности;
, снижает требования к размеру измерительного участка, энергетическому потенциалу измерительного радиоканала (НИП - объект) до 25 дБ и позволяет использовать для усиления тестового радиосигнала ШУМ малой мощности;
- реализацию необходимой дискретности измерений ДН по азимуту путем соответствующего выбора скорости движения объекта по круговой траектории;
- учет прямоугольных координат каждой испытываемой антенны в связанной системе координат объекта, начало которой не совпадает с координатами размещения приемника GPS/ГЛОНАСС;
- измерение ДН антенн объекта как вертикальной, так и горизонтальной поляризации с оценкой степени подавления радиосигнала ортогональной составляющей во всем диапазоне азимутальных углов от 0 до 360 градусов;
- проведение измерений ДН одновременно на всех выбранных частотах рабочего диапазона антенны объекта, что значительно сокращает время испытаний и затраты на их проведение.
В ОАО «Летно-исследовательский институт имени М.М. Громова» изготовлен и исследован экспериментальный образец измерительной системы в составе НИП на базе автомобиля «Фольксваген», оснащенного двумя измерительными антеннами типа Aaronia Bicolog 30100Х ортогональной поляризации (установлены на диэлектрической штанге на крыше автомобиля), двумя анализаторами спектра Rohde & Schwarz FSC3, промышленным Notebook типа Panasonic CF-53 со встроенным приемником GPS, антенна которого размещена между измерительными антеннами НИП, а измерительное оборудование в салоне автомобиля на специальном стеллаже, оснащенном преобразователем напряжения постоянного тока 12В (автомобильного аккумулятора) в напряжение 220В частоты 50 Гц для электропитания анализаторов спектра. В состав экспериментального образца системы входит также автономная группа измерительных приборов в составе: вспомогательной антенны типа Антенна П6-45, генератора ВЧ сигналов типа Agilent Technologies N9310A и малогабаритного широкополосного усилителя мощности типа GigaTronics GT-1020A (0,35 Вт), дополнительного автомобильного аккумулятора постоянного тока 12В с преобразователем напряжения 220В частоты 50 Гц.
С использованием созданного экспериментального образца измерительной системы были выполнены эксперименты по оценке погрешности измерения уровня сигнала при изменении дальности между вспомогательной антенной и НИП в диапазоне от 0 до 500 м на измерительном участке типа ВПП аэродрома «Раменское», определяющей техническую эффективность заявленного способа. Результаты натурного эксперимента и оптимизации математической модели, в соответствии с заявленным способом, представлены на фиг. 4(б), 17 - экспериментальная зависимость уровня сигнала от дальности, 18 - аппроксимация экспериментальной зависимости математической моделью, 19 - погрешность коррекции зависимости уровня сигнала от дальности с использованием математической модели.
Полученные результаты экспериментов показали, что заявленный способ измерения азимутальной ДН антенны в составе объекта при его движении по круговой траектории радиусом от 10 до 30 м, в диапазоне дальностей от 70 м до 300 м, на измерительном участке типа ВПП с коэффициентом отражения ее поверхности ≈0,94, обеспечивает коррекцию изменений уровня радиосигнала со среднеквадратической погрешностью не более 0,5 дБ (включая погрешности используемых инструментальных средств), что подтверждает возможность технической реализации способа и его высокую техническую эффективность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения пространственных диаграмм направленности антенн воздушных судов в условиях полёта | 2018 |
|
RU2692818C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 2004 |
|
RU2279100C2 |
| Способ измерения коэффициента отражения радиосигналов УКВ (ДМВ) от земной поверхности в задачах лётных испытаний авиационных радиосистем | 2024 |
|
RU2836591C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ АНТЕННЫХ ХАРАКТЕРИСТИК НА ИЗМЕРИТЕЛЬНОЙ ПЛОЩАДКЕ | 2023 |
|
RU2804836C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ПО СИГНАЛАМ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 2012 |
|
RU2490665C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАКСИМАЛЬНО ПРИМЕНИМОЙ ЧАСТОТЫ ДЛЯ ИОНОСФЕРНОЙ РАДИОСВЯЗИ | 2012 |
|
RU2516239C2 |
| Способ измерения угла места воздушного объекта в метровом диапазоне электромагнитных волн с использованием электронной карты местности | 2019 |
|
RU2720948C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ СИСТЕМА | 2011 |
|
RU2480791C2 |
| МАЛОГАБАРИТНАЯ НАВИГАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2016 |
|
RU2613342C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОБСТВЕННОГО МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 2023 |
|
RU2827103C1 |


Изобретения относятся к технике антенных измерений и может использоваться при измерениях диаграмм направленности азимутальных ДН антенн в составе наземных подвижных объектов больших размеров, в том числе летательных аппаратов (ЛА) в условиях открытых полигонов. Устройство содержит передатчик, исследуемую антенну, приемник, измерительную антенну, блок измерения дальности, блок регистрации и блок радиотехнической системы навигации. Исследуемая антенна установлена на подвижном объекте больших размеров, который размещен на измерительном участке открытого полигона, исследуемая антенна установлена на высоте h1 от его поверхности и подключена к выходу передатчика - источнику радиосигнала, излучаемого через эту антенну при вращении по азимуту, включающего программируемый генератор радиосигналов (ПГР) и широкополосный усилитель мощности (ШУМ). Выход ПГР через ШУМ связан с входом антенны объекта, второй выход ПГР и выходы штатной системы измерения истинного курса и географических координат объекта, а также выход его приемника GPS/ГЛОНАС подключены к входам системы измерения объекта (СИО). Радиосигналы, излученные антенной объекта, принимают две измерительные антенны ортогональной поляризации передвижного наземного измерительного пункта (НИП). Антенны НИП установлены на телескопической мачте с изменяемой высотой установки, выход антенн подключен к входу АСРВ, выходы АСРВ и приемника GPS/ГЛОНАСС НИП подключены через интерфейсы к его ЭВМ управления и регистрации, синхронизацию результатов измерений СИО и НИП реализуют в процедуре слияния данных ЭВМ НИП по единому времени UTC их приемников GPS/ГЛОНАСС. Кроме того, в центре круговых траекторий на высоте h1 от поверхности измерительного участка дополнительно установлена вспомогательная антенна для излучения тестового радиосигнала при измерении коэффициента отражения поверхности измерительного участка и зависимости уровня радиосигнала от дальности, вспомогательная антенна подключена к выходу ШУМ, вход которого соединен с выходом ПГР, которые совместно с автономным источником электропитания установлены в непосредственной близости от вспомогательной антенны. Технический результат заключается в повышении точности оценки ДН антенн. 2 н. и 1 з.п. ф-лы, 4 ил.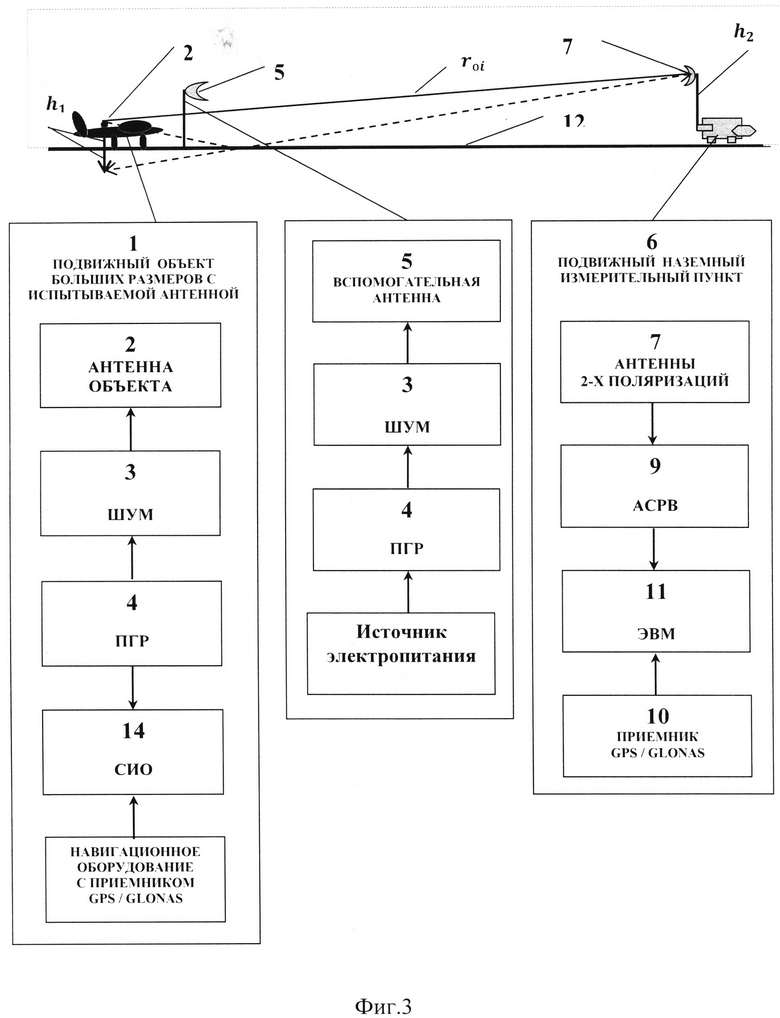
1. Способ измерения азимутальной диаграммы направленности антенны (ДН) в составе наземных подвижных объектов больших размеров, включающий установку измерительной антенны на вышке, измерение на выбранной частоте азимутальных диаграмм направленности (ДН) исследуемой и вспомогательной антенн, которые последовательно устанавливают на поворотное устройство, оценку искомой ДН исследуемой антенны, отличающийся тем, что исследуемую антенну устанавливают на высоте h1 в составе подвижного объекта больших размеров, измерение азимутальной ДН исследуемой антенны обеспечивают путем перемещения объекта на измерительном участке открытого полигона с однородной структурой поверхности (например, типовой ВПП) вокруг выбранной точки (центра) по траектории, близкой к окружности небольшого радиуса (10…30 м), тестовый радиосигнал заданной частоты, сформированный программируемым генератором (ПГР) и усиленный широкополосным усилителем мощности (ШУМ), излучают через исследуемую антенну объекта, при этом измеренные навигационной системой объекта истинный курс ψо, географическую широту ϕо, долготу λо, а также время (UTC) приемника GPS/ГЛОНАСС регистрирует система измерений объекта (СИО), излученный антенной объекта радиосигнал при его движении по круговой траектории принимают измерительные антенны ортогональной поляризации, размещенные на высоте h2 телескопической мачты передвижного наземного измерительного пункта (НИП), который устанавливают неподвижно на расстоянии от  до
до  до центра круговой траектории объекта, уровни принятых антеннами НИП радиосигналов измеряют анализатором спектра реального времени (АСРВ), результаты измерений совместно с географическими широтой ϕнип, долготой λнип и временем UTC его приемника GPS/ГЛОНАСС регистрируют в ЭВМ, результаты регистрации параметров объекта и НИП объединяют по времени UTC в единой базе данных ЭВМ из состава НИП, объединенные данные пересчитывают к фиксированным (нормированным) координатам антенны объекта, в качестве которых принимают оценки средних значений географических координат объекта, измеренных в каждой точке его круговой траектории, уровни напряженности радиосигнала Eri, измеренные на удалениях ri от антенн НИП, пересчитывают к уровням напряженности E0i, соответствующим значению дальности r0 до центра круговой траектории, с использованием математической модели изменения уровня радиосигнала от дальности, с учетом влияния отражений от поверхности измерительного участка полигона путем измерения значения коэффициента отражения γ0 поверхности измерительного участка, для чего перед измерением ДН антенны объекта в центре круговой траектории объекта на высоте h1 от уровня измерительной площадки устанавливают вспомогательную антенну, через которую излучают тестовый радиосигнал заданной частоты, принимают излучаемый радиосигнал антеннами НИП, на фиксированном расстоянии
до центра круговой траектории объекта, уровни принятых антеннами НИП радиосигналов измеряют анализатором спектра реального времени (АСРВ), результаты измерений совместно с географическими широтой ϕнип, долготой λнип и временем UTC его приемника GPS/ГЛОНАСС регистрируют в ЭВМ, результаты регистрации параметров объекта и НИП объединяют по времени UTC в единой базе данных ЭВМ из состава НИП, объединенные данные пересчитывают к фиксированным (нормированным) координатам антенны объекта, в качестве которых принимают оценки средних значений географических координат объекта, измеренных в каждой точке его круговой траектории, уровни напряженности радиосигнала Eri, измеренные на удалениях ri от антенн НИП, пересчитывают к уровням напряженности E0i, соответствующим значению дальности r0 до центра круговой траектории, с использованием математической модели изменения уровня радиосигнала от дальности, с учетом влияния отражений от поверхности измерительного участка полигона путем измерения значения коэффициента отражения γ0 поверхности измерительного участка, для чего перед измерением ДН антенны объекта в центре круговой траектории объекта на высоте h1 от уровня измерительной площадки устанавливают вспомогательную антенну, через которую излучают тестовый радиосигнал заданной частоты, принимают излучаемый радиосигнал антеннами НИП, на фиксированном расстоянии  от вспомогательной антенны, и при непрерывном изменении высоты установки измерительных антенн НИП в диапазоне от h2min до h2max производят регистрацию принятых этими антеннами уровней радиосигналов с выхода АСРВ на интервале формирования нескольких периодов интерференционного множителя:
от вспомогательной антенны, и при непрерывном изменении высоты установки измерительных антенн НИП в диапазоне от h2min до h2max производят регистрацию принятых этими антеннами уровней радиосигналов с выхода АСРВ на интервале формирования нескольких периодов интерференционного множителя:

где  . λ - длина волны радиосигнала, излучаемого антенной объекта,
. λ - длина волны радиосигнала, излучаемого антенной объекта,
определяют максимальные  и минимальные
и минимальные  значения уровней модуляции измеренного радиосигнала и по формуле:
значения уровней модуляции измеренного радиосигнала и по формуле:

оценивают значения коэффициента отражения γ0 измерительной площадки, который учитывают при пересчете уровней напряженности поля Eri, измеренных на дальности ri к нормированным значениям E0i, соответствующим дальности r0 до центра круговой траектории, по формуле

за нормированные значения курсовых углов принимают их оценки, полученные расчетным способом по значениям курса объекта, географических координат антенны объекта в каждой точке круговой траектории и географических координат НИП, при этом указанные преобразования выполняют в следующей последовательности:
- рассчитывают значения дальностей между НИП и условным центром круговой траектории объекта, а также между НИП и текущим положением объекта (приемника GPS/ГЛОНАСС) на круговой траектории ri по формулам:
r0=Parccos((sinϕ0sinϕНИП+cosϕ0cosϕНИПcos(λ0-λНИП))
ri=Parccos((sinϕ0isinϕНИП+cosϕ0icosϕНИПcos(λ0i-λНИП))
где Р=6370,4912775 км;
ϕ0i, λ0i - измеренные приемником GPS/ГЛОНАСС географические координаты круговой траектории объекта;
ϕНИП, λНИП - измеренные географические координаты НИП;
 - оценки географических координат центра круговой траектории объекта;
- оценки географических координат центра круговой траектории объекта;
- рассчитывают текущие значения курсового угла НИП αкуНИП в системе координат объекта по измеренным значениям географических координат НИП, текущих географических координат и курса объекта при его движении по круговой траектории по формулам:
αкуНИП=2π+αНИП-ψ0_(если(2π+αНИП≥ψ0)_иначе=4π+αНИП-ψ0
где  азимутальный угол НИП относительно объекта;
азимутальный угол НИП относительно объекта;
ψ0 - курс объекта;
- при несовпадении координат антенны объекта с координатами антенны приемника GPS/ГЛОНАСС вводят скорректированные текущие координаты rik и αкуНИПk по формулам
rik=ri±[xaocos(αкуНИП)+zaosin(αкуНИП)]

где хаo и zao координаты антенны в связанной системе координат объекта с началом, совпадающим с координатами антенны приемника GPS/ГЛОНАСС,
полученные оценки нормированных значений уровня радиосигнала для соответствующих значений курсового угла НИП, в системе координат объекта, принимают за оценку азимутальной ДН антенны объекта, которую в виде параметрической зависимости Eoi=ƒ(αкуНИП) отображают графически в линейных или полярных координатах, в линейном или логарифмическом масштабах, вычисляют разности в дБ нормированных оценок соответствующих уровней радиосигналов ортогональных поляризаций при каждом угловом положении объекта на круговой траектории, которые определяют степень подавления сигнала ортогональной поляризации относительно сигнала основной поляризации при всех значениях курсового угла принятого радиосигнала.
2. Способ измерения азимутальной диаграммы направленности антенны в составе наземных подвижных объектов больших размеров по п. 1, отличающийся тем, что для повышения точности пересчета измеренного уровня радиосигнала, излучаемого антенной объекта и принимаемого антеннами НИП к нормированному значению, выполняют уточнение
(оптимизацию) параметров уравнения зависимости уровня принимаемого сигнала от дальности:

с учетом полной математической модели интерференционного множителя (1), в котором оптимальные значения  и
и  определяют методом пошагового (итерационного) уточнения оценок измеренных параметров γ0 и Е0 по критерию минимума среднеквадратической погрешности аппроксимации уравнением (4) результатов измерения зависимости уровня радиосигнала от дальности, которые получают путем излучения радиосигнала заданной частоты через вспомогательную антенну, установленную в центре круговой траектории объекта на высоте h1, приема излучаемого радиосигнала измерительными антеннами НИП, подключенными к АСРВ, перемещения НИП по прямолинейной траектории от точки установки вспомогательной антенны до удаления
определяют методом пошагового (итерационного) уточнения оценок измеренных параметров γ0 и Е0 по критерию минимума среднеквадратической погрешности аппроксимации уравнением (4) результатов измерения зависимости уровня радиосигнала от дальности, которые получают путем излучения радиосигнала заданной частоты через вспомогательную антенну, установленную в центре круговой траектории объекта на высоте h1, приема излучаемого радиосигнала измерительными антеннами НИП, подключенными к АСРВ, перемещения НИП по прямолинейной траектории от точки установки вспомогательной антенны до удаления  с регистрацией уровня сигнала с выхода АСРВ в ЭВМ из состава НИП, затем выполняют повторную обработку и пересчет уровней напряженности поля Eri, измеренных на дальности ri, к нормированным значениям Ei0, соответствующим дальности r0 по формуле (3), с уточненным значением параметра γ0=γопт
с регистрацией уровня сигнала с выхода АСРВ в ЭВМ из состава НИП, затем выполняют повторную обработку и пересчет уровней напряженности поля Eri, измеренных на дальности ri, к нормированным значениям Ei0, соответствующим дальности r0 по формуле (3), с уточненным значением параметра γ0=γопт

полученные уточненные оценки нормированных значений уровня радиосигнала  для соответствующих значений αкуНИП курсового угла НИП, в связанной системе координат объекта, принимают за оптимальную оценку азимутальной ДН антенны объекта, а разности значений уровней в дБ нормированных оценок соответствующих радиосигналов, принятых антеннами НИП при каждом значении курсового угла антенны объекта, за оптимальную оценку степени подавления сигнала основной поляризации, сигналом ортогональной поляризации, при этом погрешность пересчета (приведения) уровня радиосигнала к нормированным условиям с использованием уравнения (5) в диапазоне дальностей
для соответствующих значений αкуНИП курсового угла НИП, в связанной системе координат объекта, принимают за оптимальную оценку азимутальной ДН антенны объекта, а разности значений уровней в дБ нормированных оценок соответствующих радиосигналов, принятых антеннами НИП при каждом значении курсового угла антенны объекта, за оптимальную оценку степени подавления сигнала основной поляризации, сигналом ортогональной поляризации, при этом погрешность пересчета (приведения) уровня радиосигнала к нормированным условиям с использованием уравнения (5) в диапазоне дальностей  не превышает погрешности пересчета, с использованием квадратичной формулы Б.А. Введенского, на дальностях
не превышает погрешности пересчета, с использованием квадратичной формулы Б.А. Введенского, на дальностях  , что, при прочих равных условиях, обеспечивает уменьшение размера измерительной площадки открытого полигона, выигрыш в отношении сигнал/шум измерительного канала не менее 25 дБ позволяет использовать широкополосные усилители малой мощности в составе объекта для измерения ДН его антенн.
, что, при прочих равных условиях, обеспечивает уменьшение размера измерительной площадки открытого полигона, выигрыш в отношении сигнал/шум измерительного канала не менее 25 дБ позволяет использовать широкополосные усилители малой мощности в составе объекта для измерения ДН его антенн.
3. Устройство измерения азимутальной диаграммы направленности антенны в составе наземных подвижных объектов больших размеров, содержащее передатчик, исследуемую антенну, приемник, измерительную антенну, блок измерения дальности, блок регистрации и блок радиотехнической системы навигации, отличающееся тем, что исследуемая антенна установлена на подвижном объекте больших размеров, который размещен на измерительном участке открытого полигона, исследуемая антенна установлена на высоте h1 от его поверхности и подключена к выходу передатчика - источнику радиосигнала, излучаемого через эту антенну при вращении по азимуту, включающего программируемый генератор радиосигналов (ПГР) и широкополосный усилитель мощности (ШУМ), выход ПГР через ШУМ связан с входом антенны объекта, второй выход ПГР и выходы штатной системы измерения истинного курса и географических координат объекта, а также выход его приемника GPS/ГЛОНАС подключены к входам системы измерения объекта (СИО), а две приемные измерительные антенны ортогональной поляризации размещены на передвижном наземном измерительном пункте (НИП), антенны НИП установлены на телескопической мачте с изменяемой высотой установки, выход антенн подключен к входу АСРВ, выходы АСРВ и приемника GPS/ГЛОНАСС НИП подключены через интерфейсы к его ЭВМ управления и регистрации, синхронизацию результатов измерений СИО и НИП реализуют в процедуре слияния данных ЭВМ НИП по единому времени UTC их приемников GPS/ГЛОНАСС, кроме того, в центре круговых траекторий на высоте h1 от поверхности измерительного участка дополнительно установлена вспомогательная антенна для излучения тестового радиосигнала при измерении коэффициента отражения поверхности измерительного участка и зависимости уровня радиосигнала от дальности, вспомогательная антенна подключена к выходу ШУМ, вход которого соединен с выходом ПГР, которые совместно с автономным источником электропитания установлены в непосредственной близости от вспомогательной антенны.
| СПОСОБ ИЗМЕРЕНИЯ АЗИМУТАЛЬНОЙ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 2005 |
|
RU2298198C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МЕТОДОМ ОБЛЕТА | 1984 |
|
SU1309741A1 |
| Устройство для измерения диаграммы направленности диапазонной антенны | 1990 |
|
SU1720034A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИАГРАММ НАПРАВЛЕННОСТИ ЩЕЛЕВОЙ АНТЕННОЙ РЕШЕТКИ ПО РЕЗУЛЬТАТАМ ИЗМЕРЕНИЙ В БЛИЖНЕЙ ЗОНЕ ФРЕНЕЛЯ | 2003 |
|
RU2237253C1 |

