Область техники
Изобретение относится к области управления движением космических аппаратов (КА) с помощью реактивной двигательной установки (ДУ) и применяется для управления движением центра масс (ЦМ) КА. Наиболее эффективная область его использования в задачах обеспечения высокоточной коррекции орбиты КА и межорбитального маневрирования.
Предшествующий уровень техники
Рассматриваемая задача управления движением ЦМ КА широко отражена в отечественной и зарубежной литературе, а также представлена в авторских свидетельствах. Можно выделить, например, следующие источники: К.Б. Алексеев, Г.Г. Бебенин «Управление космическими летательными аппаратами», М., «Машиностроение», 1974, с. 143; Г.З. Давлетшин «Активно-гравитационные маневры космических аппаратов, М., «Машиностроение», 1980; Платонов В.Н. «Одновременное управление движением центра масс и вокруг центра масс при маневрах космических аппаратов на геостационарной и высокоэллиптических орбитах с использованием электрореактивных двигателей», Космическая техника и технологии, 2013, №1, С. 56-65; патент RU 2124461, патент RU 2006430; Патент US 5130931 А, патент RU 2112716, патент RU 2610793 и др.
Наиболее близким к заявленному изобретению является изобретение по патенту RU 2610793, опубл. 15.02.2017, которое взято за прототип, поскольку реализует идентичный принцип управления. Представленный способ имеет общие с прототипом признаки. Для управления ДУ КА применен специальный режим тактовой работы (РТР), предусматривающий разбиение всего интервала маневрирования на рабочие такты длительностью от единиц до нескольких десятков секунд; в каждом такте коэффициенты дросселирования отдельных двигателей рассчитываются по заданному значению средней тяги (либо среднего ускорения) ДУ и требуемым воздействиям на КА с целью поддержания заданной ориентации и минимизации накопления его кинетического момента. Расчет времен выключения двигателей ведется с учетом зависимости тяги двигателей от давления в топливном тракте, выхода на режим и последействия, рассчитываемых на каждом такте РТР по бортовой математической модели каждого двигателя, полученной на этапе огневых испытаний. При этом подход с использованием бортовой математической модели, рассмотренный в прототипе, имеет следующие недостатки: объективно невозможно подобрать точную и при этом простую для вычисления аппроксимирующую функцию тяги от давления с небольшим набором коэффициентов, что приводит к снижению точности вычисления поправочного коэффициента к тяге согласно прототипу, и, следовательно, к снижению точности маневрирования; проведение большого объема огневых испытаний для достаточно точной аппроксимации тяги для различного времени включения двигателя в такте уменьшает ресурс по количеству открытий клапанов двигателя; усложнение математической модели ДУ приводит к увеличению вероятности ошибок в отдельных коэффициентах аппроксимации, причем ошибки такого рода бывает невозможно обнаружить на этапе наземной отработки. Следует отметить, что традиционный подход использования акселерометра для отсечки тяги, не учитывающий ухода нулевого сигнала на длительных участках маневрирования, что особенно актуально при использовании МЭМС-акселерометра, не обеспечивает заданной точности маневрирования. Кроме того, отсечка тяги по акселерометру без регулирования среднего ускорения (тяги) на протяжении всего участка маневрирования смещает точку приложения импульса по времени, что так же приводит к ухудшению точности коррекции элементов орбиты. Настоящее изобретение позволяет парировать указанные недостатки.
Раскрытие изобретения
Ставится задача разработки способа управления ДУ на основе прототипа, лишенного указанных выше недостатков.
Технический результат от использования изобретения заключается в повышении точности и надежности описанного в прототипе способа маневрирования КА, а также в экономии ресурса ДУ. Технический результат достигается совокупностью общих с прототипом и отличительных признаков изобретения. Аналогично прототипу, к корпусу КА прикладывается вектор тяги ДУ в режиме тактовой работы, предусматривающем разбиение всего интервала маневрирования на рабочие такты и расчет коэффициентов дросселирования отдельных двигателей по заданному значению средней тяги либо среднего ускорения ДУ и требуемым воздействиям на КА с целью парирования накопления его кинетического момента. В отличие от прототипа, КА дополнительно снабжен акселерометром, и на каждом такте в промежутках между работой двигателей проводится измерение дрейфа нулевого сигнала акселерометра, которое учитывается при оценке текущего приращения скорости, а также рассчитывается поправочный коэффициент к времени включения двигателей на следующем такте с целью обеспечения постоянного среднего ускорения на всем участке маневрирования.
Согласно изобретению, выполняется измерение с осреднением каким-либо способом линейного ускорения после закрытия клапанов всех двигателей и по прошествии периода последействия ДУ, в каждом такте РТР. При этом за период последействия принимается фиксированный максимальный промежуток времени, в течение которого может выдаваться остаточный импульс после закрытия клапанов ДУ. Найденная оценка ускорения при закрытых клапанах вычитается из измеренного ускорения в течение времени открытия клапанов на следующем такте, таким образом парируется дрейф нулевого сигнала акселерометра. В течение всего времени маневра выполняется интегрирование линейного ускорения по оси тяги, в результате интегрирования имеем приращение линейной скорости, по которому после достижения им заданной величины выполняется отсечка тяги. Описанная выше совокупность признаков изобретения приводит к повышению точности выдачи импульса по абсолютной величине за счет более точного по сравнению с прототипом знания текущего приращения линейной скорости. По запланированной длительности выдачи импульса, величине импульса и длительности такта РТР, для каждого такта может быть заранее вычислено запланированное приращение линейной скорости. На каждом такте РТР, начиная со второго, с учетом текущего приращения линейной скорости относительно запланированного, вводится поправочный коэффициент к времени включения двигателей для обеспечения равномерного среднего ускорения на всем участке маневрирования. Таким образом разность величин выданного и запланированного импульса в такте сводится к минимуму, при этом обеспечивается постоянное среднее ускорение в такте РТР. Это повышает точность выдачи импульса по времени, что необходимо для высокоточной коррекции орбиты.
Указанная совокупность признаков изобретения, отраженная в формуле, позволяет улучшить точность знания и выдачи заданного текущего приращения скорости при маневрировании в каждом такте РТР, и, как следствие, повысить точность маневрирования КА. Кроме того, повышается надежность алгоритмов управления ДУ в РТР, т.к. расчет приращения скорости выполняется не по математической модели ДУ, учитывающей только априорные данные, а по текущим измерениям ускорения. Следовательно, исключается влияние ошибок в математической модели ДУ, а также, становится возможным упрощение данной модели без ущерба для точности маневрирования, что приводит к сокращению необходимого объема огневых испытаний, и, как следствие, к экономии ресурса по количеству включений двигателя.
Краткое описание чертежей
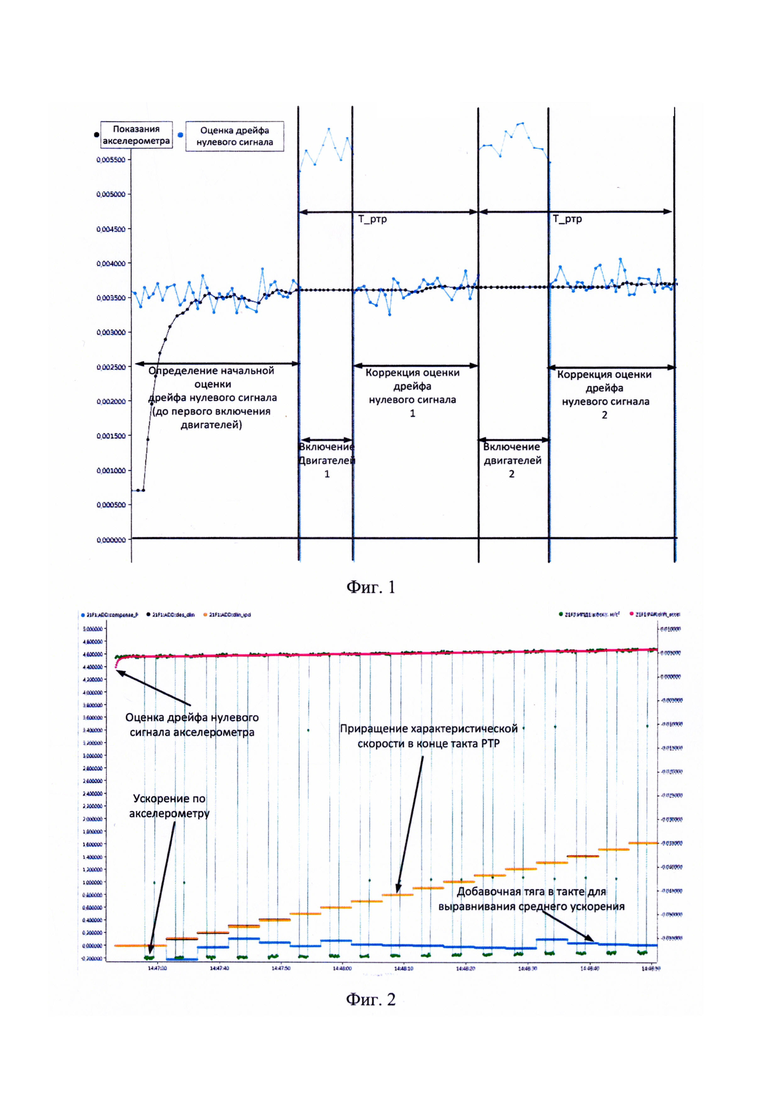
На фиг. 1 показана циклограмма работы ДУ в РТР с оценкой дрейфа нулевого сигнала акселерометра.
На фиг. 2 показано изменение параметров управления ДУ и приращение характеристической скорости в процессе моделирования маневра.
Осуществление изобретения
Способ управления движением центра масс космического аппарата, снабженного двигательной установкой включает коррекцию орбиты космического аппарата путем приложения вектора тяги двигательной установки к его корпусу в режиме тактовой работы, при этом, космический аппарат дополнительно снабжен акселерометром, и на каждом такте в промежутках между работой двигателей проводится измерение дрейфа нулевого сигнала акселерометра, которое учитывается при оценке текущего приращения скорости, а также рассчитывается поправочный коэффициент к времени включения двигательной установки на следующем такте с целью обеспечения постоянного среднего ускорения на всем участке маневрирования.
В качестве примера, рассмотрим осуществление изобретения для КА, снабженного ДУ в виде блока из трех двигателей, сонаправленных с осью OY базовой системы координат (БСК) и расположенных равномерно на окружности радиусом RJ, тремя управляющими двигателями-маховиками (УДМ), расположенными на осях БСК и инерциальным измерителем параметров движения, совмещающем в одном приборе датчики угловых скоростей и акселерометр по оси выдачи тяги, для более точной компенсации действия вращательного движения КА на показания акселерометра. Времена открытия клапанов двигателей tрдi, i=1…3, рассчитываются следующим образом:
tрдi=KP⋅ki⋅TT,
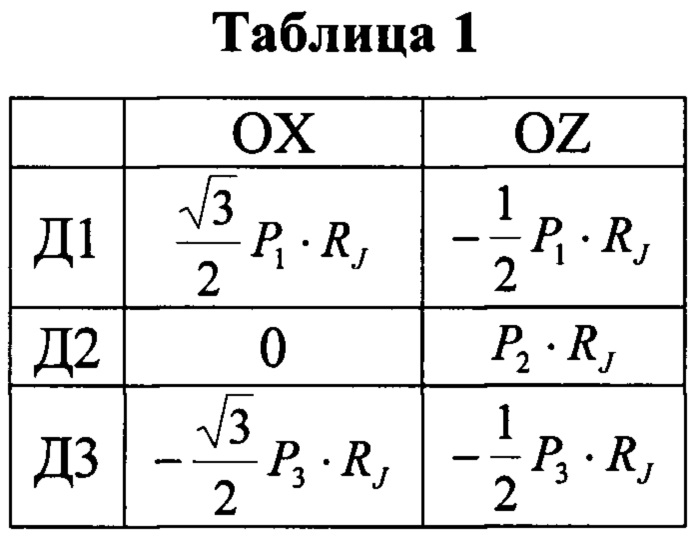
где KP - поправочный коэффициент к времени включения двигателей (начальное значение для первого такта РТР KP=1, на последующих тактах пересчитывается, как показано далее), ki - коэффициенты дросселирования, TT - период РТР. Для рассматриваемой конфигурации ДУ, при условии, что двигатели создают управляющие моменты по осям ОХ и OZ, указанные в таблице 1, коэффициенты дросселирования ki рассчитываются аналогично прототипу:
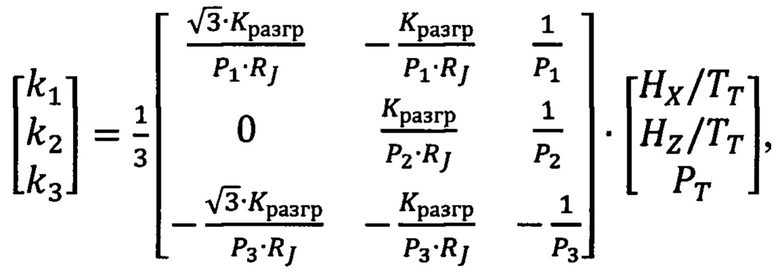
где HX, HZ - текущее значение кинетических моментов УДМ по осям X и Z, Kразгр - коэффициент разгрузки УДМ за такт РТР, Р1, Р2, Р3 - тяги двигателей в установившемся режиме, РТ - средняя тяга.
Для обеспечения заданного среднего ускорения до начала работы ДУ исходя из длительности промежутка маневрирования и требуемого приращения скорости рассчитывается требуемое приращение скорости за период РТР:
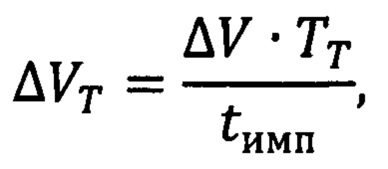
где ΔV - общий запланированный импульс, tимп - запланированное время выдачи импульса. Период РТР ТТ и время выдачи импульса tимп задаются таким образом, чтобы пауза в работе всех двигателей превышала их период последействия (время, в течение которого происходит постепенный спад тяги после закрытия клапанов). Средняя тяга для расчета дросселирующих коэффициентов при этом задается следующим равенством:
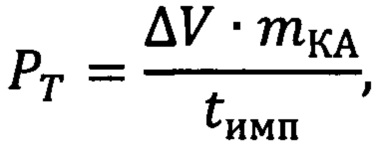
где mКА - масса КА на момент начала выдачи импульса.
До включения ДУ проводится фильтрация показаний акселерометра. Далее, в момент включения ДУ, найденная оценка ускорения при закрытых клапанах принимается за нулевой сигнал и вычитается из показаний ускорения на первом такте РТР. После закрытия всех клапанов ДУ и по прошествии периода последействия аналогично проводится фильтрация показаний акселерометра, например, по следующей формуле:

где a0 - величина дрейфа нулевого сигнала, k - коэффициент сглаживания, a*- измеренное ускорение. Полученное значение дрейфа нулевого сигнала вычитается из ускорения на следующем такте РТР, при этом на время включения двигателей в следующем такте вводится поправочный коэффициент KP, учитывающий неточную выдачу заданного приращения скорости в предыдущих тактах. Считая, что на борту ведется интегрирование линейных ускорений и уравнений массового расхода топлива, рассчитаем поправочный коэффициент к времени включения двигателей следующим образом:
где ΔVT - требуемое приращение линейной скорости за период РТР,  - оценка фактического приращения линейной скорости за период РТР, вычисленная с учетом оценки дрейфа нулевого сигнала акселерометра, mКА - текущая масса КА.
- оценка фактического приращения линейной скорости за период РТР, вычисленная с учетом оценки дрейфа нулевого сигнала акселерометра, mКА - текущая масса КА.
Осреднение ускорения при закрытых клапанах, вычитание ускорения на следующем такте во время работы ДУ и расчет коэффициента для следующего такта проводятся по описанной схеме до последнего запланированного такта РТР. На каждом такте проверяется условие достижения требуемого приращения скорости для отключения ДУ, при этом учитывается задержка между временем, на которое измеряется текущее ускорение и реакцией системы управления на команду отключения ДУ.
Для более точного приближения текущего дрейфа нулевого сигнала акселерометра может использоваться фильтр Калмана или другие методы фильтрации либо постобработки измерений. Также можно производить расчет поправочного коэффициента к времени включения двигателей по более сложным формулам, обеспечивающим лучшее качество управления.
Изобретение относится к области управления движением космических аппаратов (КА) с помощью реактивной двигательной установки (ДУ). Для управления движением центра масс КА корректируют орбиту КА путем приложения вектора тяги ДУ к его корпусу в режиме тактовой работы. КА дополнительно снабжен акселерометром. На каждом такте в промежутках между работой двигателей проводят измерение дрейфа нулевого сигнала акселерометра. Его учитывают при оценке текущего приращения скорости, а также рассчитывают поправочный коэффициент к времени включения двигателей на следующем такте с целью обеспечения постоянного среднего ускорения на всем участке маневрирования. Изобретение позволяет повысить точность и надежность выполнения маневров КА, а также увеличить ресурс ДУ. 1 табл., 2 ил.
Способ управления движением центра масс космического аппарата, снабженного двигательной установкой, включающий коррекцию орбиты космического аппарата путем приложения вектора тяги двигательной установки к его корпусу в режиме тактовой работы, отличающийся тем, что космический аппарат дополнительно снабжен акселерометром, и на каждом такте в промежутках между работой двигателей проводится измерение дрейфа нулевого сигнала акселерометра, которое учитывается при оценке текущего приращения скорости, а также рассчитывается поправочный коэффициент к времени включения двигателей на следующем такте с целью обеспечения постоянного среднего ускорения на всем участке маневрирования.
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ, СНАБЖЕННЫМ МНОГОСОПЛОВОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ | 2016 |
|
RU2610793C1 |
| СПОСОБ КОРРЕКЦИИ ОРБИТАЛЬНОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2496688C2 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ, СНАБЖЕННЫМ РЕАКТИВНЫМИ ДВИГАТЕЛЯМИ С НАПРАВЛЕННЫМИ ПОД УГЛОМ К ОСЯМ СВЯЗАННОГО БАЗИСА И СМЕЩЕННЫМИ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС АППАРАТА ЛИНИЯМИ ДЕЙСТВИЯ ТЯГ, СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА, БЛОК РЕАКТИВНЫХ ДВИГАТЕЛЕЙ СИСТЕМЫ | 1997 |
|
RU2124461C1 |
| CN 100493993 C, 03.06.2009 | |||
| JPS 62160998 A, 16.07.1987 | |||
| US 10046869 B2, 14.08.2018. | |||

