Изобретение относится к вооружению и военной технике, в частности к системам управления движением различного вида объектов, используемых в качестве мишеней, может быть использовано для обучения и тренировок личного состава стрельбе из стрелкового оружия, и существенно повысить боеспособность спецподразделений сухопутных войск.
Известен ряд устройств для управления подвижными мишенями /1, 2/, принцип действия которых заключается в перемещении по рельсовым направляющим посредством троса носителя, с установленной на нем мишенью. Устройства, соответственно, содержат рельсовые направляющие, тележку/опорные салазки с мишенью, тяговый механизм с гибкими тягами, включающий реверсивный привод, лебедку и канат/трос, а также пульт управления и связи.
Общими недостатками данных устройства являются:
- возможность перемещения носителя с мишенью только в одном линейном направлении, и, таким образом, практически полная предсказуемость «поведения» мишенного объекта, что существенно снижает уровень подготовки личного состава;
- потребность для монтажа достаточно длинного и относительно ровного участка местности;
- большие материальные и трудовые затраты на монтаж, а также ремонт при возможном повреждении рельсовых направляющих средствами поражения, используемыми при тренировочной стрельбе.
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому результату является устройство для управления перемещением подвижной мишени /3/, реализующее способ, в соответствии с которым тяговое усилие от лебедок к носителю мишени прилагают попеременно в трех разных направлениях, обеспечивая, таким образом, перемещение носителя по заданной траектории.
Устройство содержит носитель, размещенное на нем силуэтное изображение объекта поражения, систему приводных устройств с гибкими тягами - лебедок с индивидуальными реверсивными приводами, обеспечивающих перемещение носителя по заданной траектории, а также комплект аппаратуры управления и связи, причем его конструкция предполагает наличие минимум трех приводных устройств.
Анализ принципа действия и конструктивного исполнения данного устройства показывает, что оно обеспечивает хорошее управление перемещением подвижной мишени по горизонтальному мишенному пространству, т.е. в горизонтальной плоскости.
Однако, в случае его использовании в неизменном виде для управления мишенью в вертикальном пространстве (вертикальной плоскости) устройство обладает конструктивной избыточность, что влечет соответственно:
- заведомую сложность конструкции, - откуда следуют большие материальные и энергетические затраты на изготовление, монтаж и эксплуатацию;
- заведомую сложность программного обеспечения аппаратуры управления, задающей движение носителя с мишенью по заданной траектории посредством управления тремя приводными устройствами.
Технической задачей предлагаемого изобретения является устранение вышеупомянутых недостатков, а именно - упрощение конструкции устройства, программного обеспечения входящего в его состав комплекта аппаратуры управления, а также уменьшение материальных и энергетических затрат на изготовление, монтаж и эксплуатацию, с целью повышения уровня подготовки личного состава в процессе его обучении и тренировок при стрельбе из стрелкового оружия.
Решение поставленной технической задачи достигается тем, что в известном устройстве для управления перемещением подвижной мишени, содержащем носитель, размещенное на нем силуэтное изображение объекта поражения, систему приводных устройств с гибкими тягами - лебедок с индивидуальными приводами, обеспечивающих перемещение носителя по заданной траектории, а также комплект аппаратуры управления и связи, в соответствии с изобретением система приводных устройств содержит две лебедки с индивидуальными приводами и гибкими тягами, расположенные выше предполагаемой траектории перемещения мишени, а подвижный носитель выполнен с весом, обеспечивающим натяжение гибких тяг приводных устройств.
Необходимость и достаточность указанных отличительных признаков устройства может быть пояснена следующим образом.
В устройстве-прототипе /3/ тяговое усилие к подвижному носителю мишени прилагают посредством совместной регулируемой работы трех лебедок, размещаемых в вершинах треугольника, т.е. посредством действия трех силовых факторов.
Размещение двух лебедок с индивидуальными приводами и гибкими тягами выше предполагаемой траектории перемещения мишени позволяет (при вертикальном исполнении устройства) вместо силового фактора от третьей лебедки, в отличие от прототипа, использовать вес подвижного носителя, т.е. имеющийся практически бесплатный ресурс - силу тяжести.
Количество лебедок здесь меньше, конструкция устройства при этом упрощается, по крайней мере за счет сокращения однотипных элементов, материальные и энергетические затраты на изготовление, монтаж и эксплуатацию естественно уменьшаются. Соответственно упрощается и программное обеспечение, т.к. вместо управления тремя приводными устройствами, здесь требуется обеспечить управление всего двумя.
Выполнение подвижного носителя с весом, обеспечивающим натяжение гибких тяг приводных устройств, позволит компенсировать возможные остаточные деформаций гибких тяг при сходе их с лебедок.
Гибкие тяги целесообразно выполнить из прозрачного материала, или из лент с ориентацией их кромок перпендикулярно плоскости заданного перемещения подвижного носителя. Со стороны стрелка, при достаточно большой дистанции стрельбы, тяги будут практически не видны. Предвидеть по их расположению возможное перемещение или появление мишени в соответствующей области мишенного пространства будет затруднительно, что положительно скажется на качестве стрелковой подготовки.
Приложение тяговых усилий к носителю попеременно в разных направлениях посредством совместной регулируемой работы двух лебедок, размещенных выше предполагаемой траектории перемещения мишени, совместно с действием веса носителя, позволяет обеспечить перемещение носителя с мишенью в направлении результирующего вектора скорости, приобретаемого вследствие разнонаправленности векторов тягового усилия при одновременной работе на «тягу» двух лебедок, или же непосредственно в направлении вектора «тяги» от одной лебедки, с учетом действия вектора веса носителя.
При регулируемом управлении приводами лебедок это позволит осуществлять заданное перемещение носителя, с размещенным на нем силуэтным изображением объекта поражения, в пределах всей площади мишенного пространства, т.е. мишень при движении в вертикальной плоскости можно переместить в любую точку.
Бесступенчатое регулирование по частоте и направлению вращения посредством компьютера, дополнительно содержащегося в комплекте аппаратуры управления, приводов лебедок в итоге обеспечит управляемое перемещение мишени по заранее определенной программе. При постоянной частоте вращения привода скорость намотки гибкой тяги на барабан лебедки зависит от диаметра намотки (то же и при сматывании гибкой тяги). Регулируемый привод позволит обеспечить оптимальные параметры этого процесса для каждой из используемых лебедок вне зависимости от текущего диаметра намотки.
Изобретение поясняется следующей графической информацией.
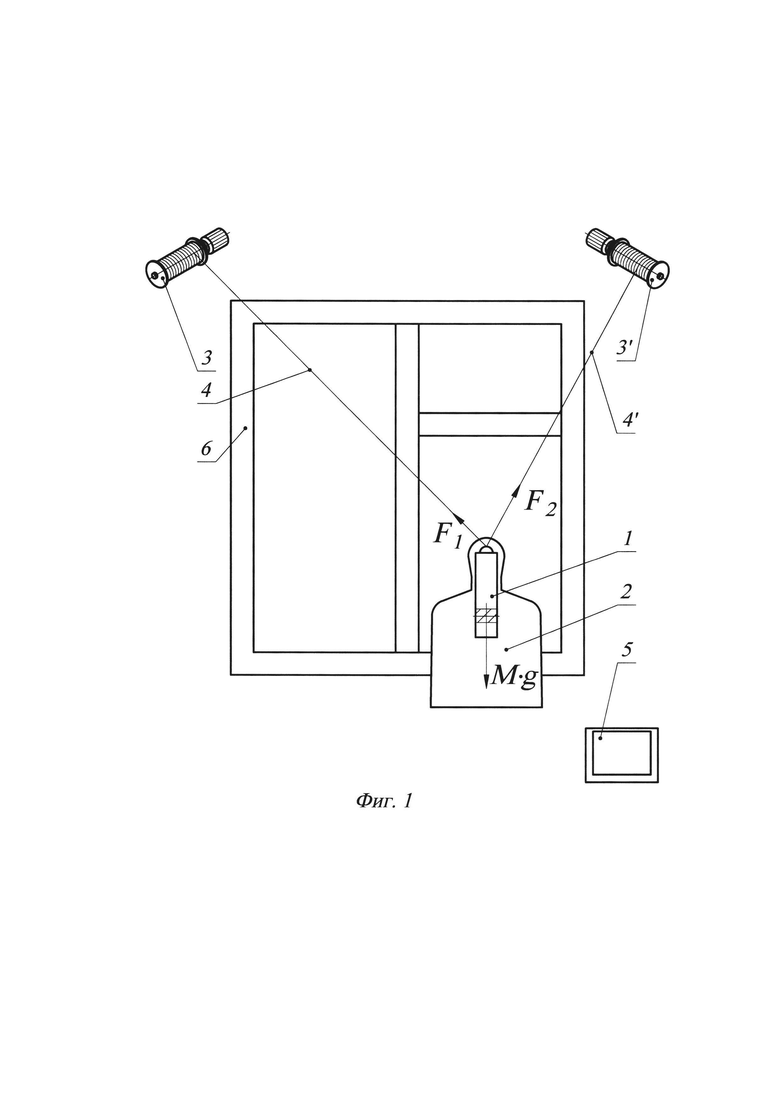
На фиг. 1 изображена принципиальная схема устройства, размещенного с тыльной стороны оконного проема с поясной мишенью типа №4, в определенный фиксированный момент времени.
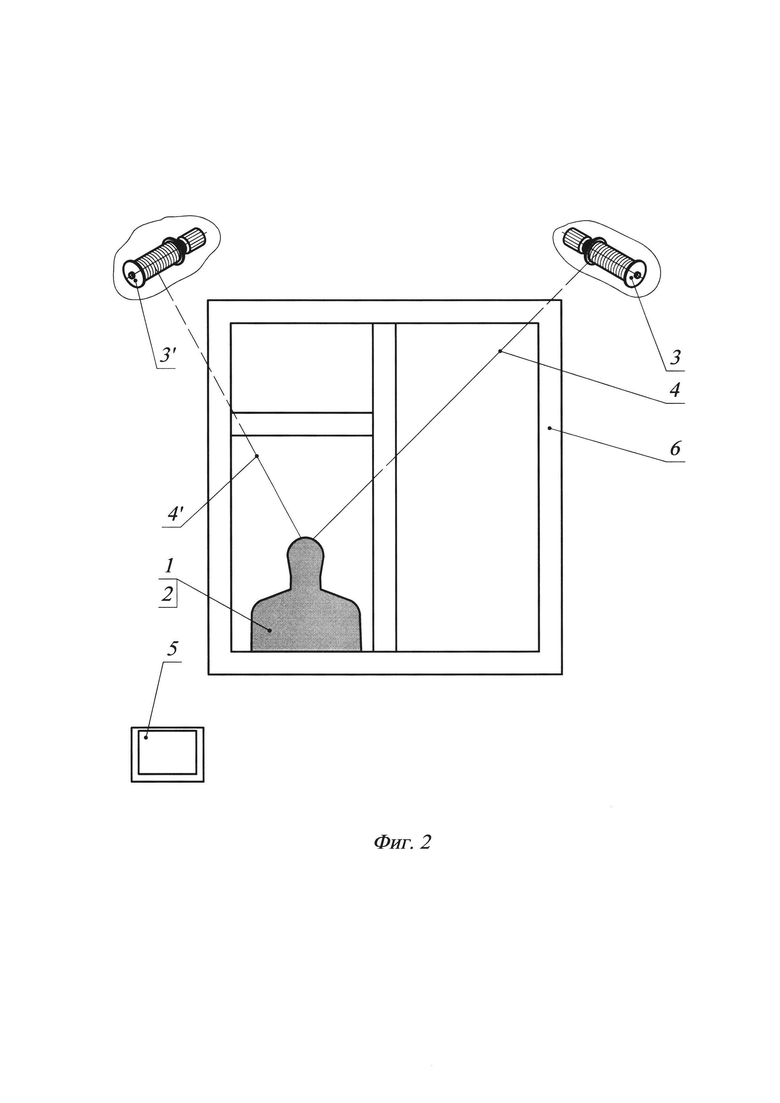
На фиг. 2 - вид мишени типа №4, управляемой устройством, с лицевой стороны оконного проема.
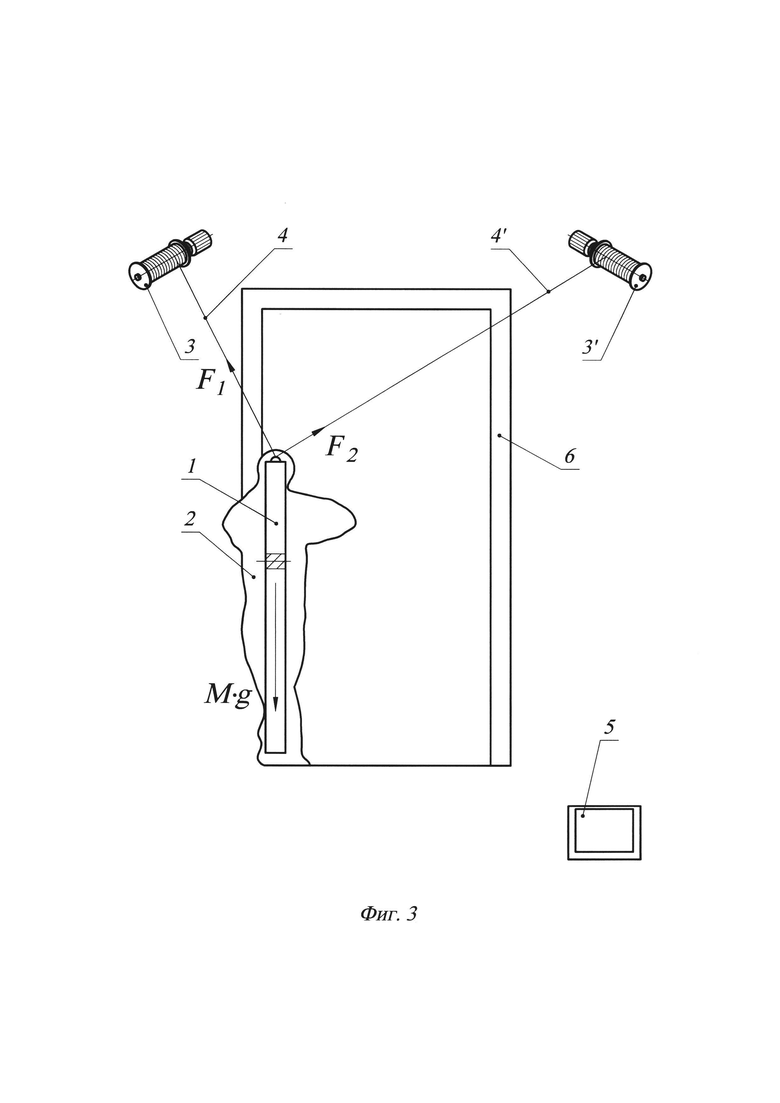
На фиг. 3 - принципиальная схема устройства, размещенного с тыльной стороны дверного проема с ростовой мишенью типа №8, в определенный фиксированный момент времени.
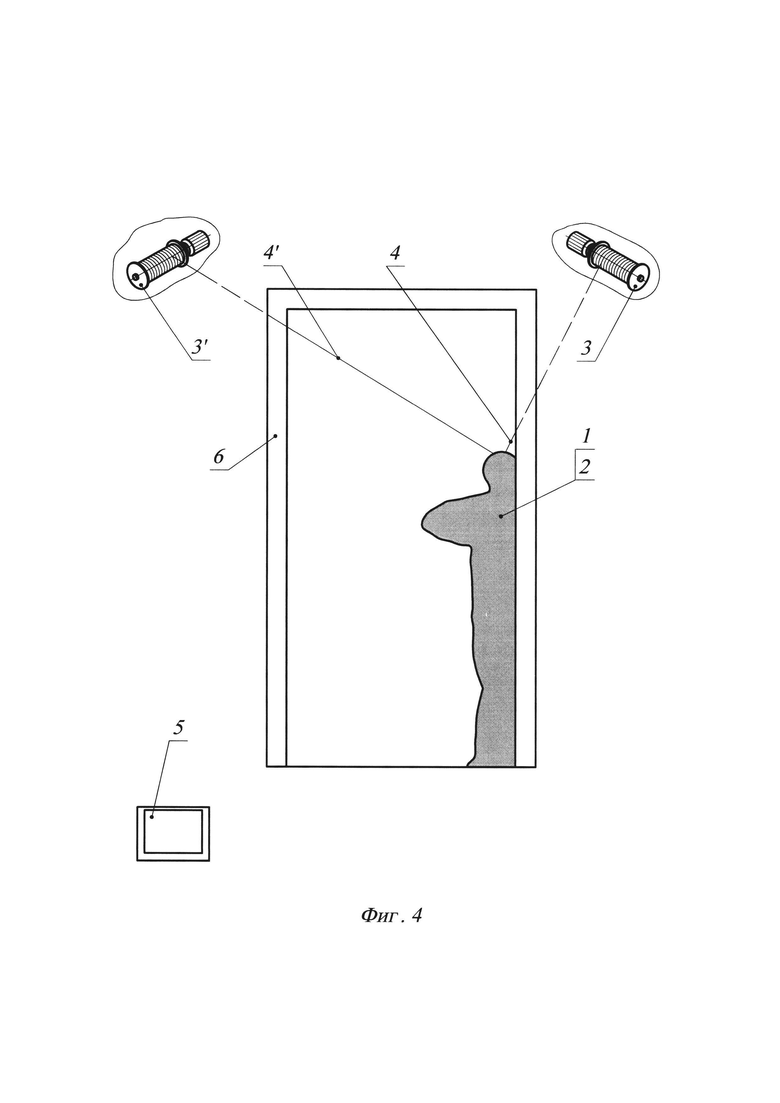
На фиг. 4 - вид ростовой мишени типа №8, управляемой устройством, с лицевой стороны дверного проема.
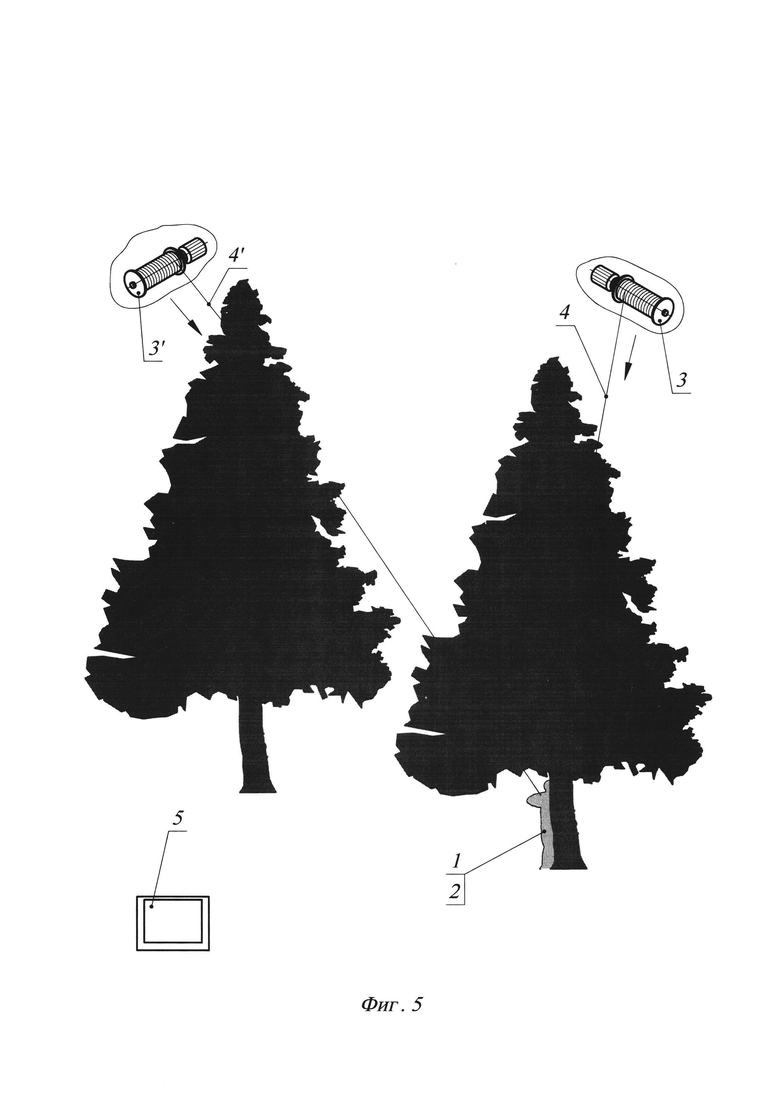
На фиг. 5 - вид ростовой мишени типа №8, управляемой устройством, при применении в лесной местности.
Для упрощения изображений линии энергопитания и информационных каналов управления приводами лебедок условно не показаны.
Данные иллюстрации возможности применения устройства не исчерпывают, при необходимости приводы лебедок, например, могут быть размещены на отдельных возвышенностях в горной местности, внутри и вне транспортных средств, отдельных вертикальных стойках, и т.п.Также могут использоваться и другие типы силуэтных мишеней, закрепляемых на носителе.
Носитель 1 с закрепленной на нем силуэтной мишенью 2 соединен с приводными устройствами - двумя лебедками с индивидуальными приводами 3 и 3' посредством гибких тяг 4 и 4' (фиг. 1, 3). Лебедки с индивидуальными приводами 3 и 3' расположены выше предполагаемой траектории перемещения мишени 2 (размещенной на носителе 1), на расстоянии друг от друга не меньшем ширины мишенного пространства, а гибкие тяги 4 и 4', направлены под углом к горизонтальной поверхности.
Натяжение гибких тяг 4 и 4' приводных устройств 3 и 3' обеспечено весом подвижного носителя 1.
Управление приводами лебедок осуществляется с помощью введенного в комплект аппаратуры управления и связи компьютера 5, по проводным либо беспроводным линиям (на схеме не показаны). Векторами F1,F2, M⋅g на схеме показаны действующие на носитель силовые факторы, и возможные направления сопутствующих им перемещений носителя 1 с силуэтной мишенью 2 по команде управления, переданной с компьютера 5 на приводы лебедок 3 и 3'.
Система приводных устройств 3 и 3' (лебедки с индивидуальными приводами и гибкими тягами 4 и 4') расположена выше предполагаемой траектории перемещения силуэтной мишени 2 с тыльной стороны оконного (фиг. 1), дверного проема 6 (фиг. 3), или стволов деревьев (фиг. 5).
Со стороны тренирующегося стрелка описанные мишенные обстановки выглядят как представлено на фиг. 2, фиг. 4, фиг. 5. Условно показанные на данных иллюстрациях гибкие тяги 4 и 4' при выполнении из прозрачного материала, или из лент с ориентацией их кромок перпендикулярно плоскости заданного перемещения подвижного носителя 1, при достаточно большой дистанции стрельбы, будут практически не видны.
Работа устройства осуществляется следующим образом (на примере фиг. 1).
Лебедки с индивидуальными регулируемыми приводами 3 и 3' размещаются в заданных позициях мишенного пространства (например, с тыльной стороны соответствующего стенного проема 6) выше предполагаемой траектории перемещения силуэтной мишени 2, и посредством гибких тяг 4 и 4' соединяются с носителем 1, на котором закрепляется мишень 2.
Компьютером 5 по намеченной программе, по проводным либо беспроводным линиям связи осуществляется управление регулируемыми приводами лебедок 3 и 3', с учетом получаемой по обратным каналам связи информации с соответствующих датчиков о текущем натяжении гибких тяг 4 и 4', скорости их намотки или сматывания с барабанов лебедок, скорости перемещения носителя 1 и его местоположении.
Возможные направления перемещения носителя 1 с мишенью 2 из текущей позиции по команде управления, переданной с компьютера 5 на приводы лебедок 3 и 3', определяются действием на носитель силовых факторов F1, F2 и M⋅g.
Например, при включении приводов лебедок 3 на намотку, а 3' - на разматывание гибкой тяги, начальное перемещение из данной точки будет осуществляться в направлении вектора F1; при включении приводов 3 и 3' на намотку, - противоположно направлению вектора M⋅g.; при включении привода 3 на разматывание гибкой тяги, а 3' на намотку, - в направлении вектора F2; при включении приводов 3 и 3' на размотку, - в направлении вектора M⋅g.
Таким образом, при посредстве предварительно запрограммированного компьютерного управления приводами лебедок 3 и 3' осуществляется движение носителя 1 с мишенью 2 по заданной траектории в границах мишенного пространства.
Предложенное устройство позволяет мишени постоянно маневрировать при движении в пределах заданного вертикального мишенного пространства, что приближает процесс обучения к реальным боевым условиям, и существенно повысит уровень подготовки личного состава в процессе его обучения и тренировок при стрельбе из стрелкового вооружения.
Так, например, отработка огневых задач по мишеням-имитаторам типа №4, №8 и т.п.с использованием лазерных имитаторов поражения или же непосредственное решение огневых задач практическими или штатными боеприпасами позволит существенно повысить боеспособность спецподразделений сухопутных войск.
Источники информации, принятые во внимание при оформлении заявки:
1) Патент США US 20110031695 A1 Moving target system for defensive training, F41J 9/02, 2011;
2) Патент РФ RU 60199(13) U1 Мобильный комплекс для обучения приемам и тактике стрельбы мотострелковых подразделений, F41J 1/18, 2006;
3) Патент РФ RU 2620245 Способ управления перемещением подвижной мишени и устройство для его осуществления, F41J 9/00, 2017 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления перемещением подвижной мишени и устройство для его осуществления | 2016 |
|
RU2620245C1 |
| СИЛУЭТНАЯ МИШЕНЬ | 2015 |
|
RU2594453C1 |
| Мишень-имитатор крупнобагаритной бронетехники | 2023 |
|
RU2805387C1 |
| Многоцелевая мишенная установка | 2024 |
|
RU2827536C1 |
| Наземная мишенная установка типа вертолет | 2018 |
|
RU2725119C2 |
| Мишенная установка | 2023 |
|
RU2799576C1 |
| Способ формирования атмосферной проекционной мишени для обучения боевой стрельбе и устройство для его осуществления | 2016 |
|
RU2638510C1 |
| МИШЕННАЯ УСТАНОВКА | 2008 |
|
RU2371661C1 |
| РОБОТИЗИРОВАННАЯ, АНАТОМИЧЕСКОЙ ФОРМЫ МИШЕНЬ | 2015 |
|
RU2595558C1 |
| Проекционный тренажер для освоения техники стрельбы | 2024 |
|
RU2827956C1 |
Изобретение относится к вооружению и военной технике, в частности к устройствам для перемещения мишени. Устройство для управления перемещением подвижной мишени в вертикальной плоскости содержит носитель, размещенное на нем силуэтное изображение объекта поражения, систему приводных устройств с гибкими тягами - лебедок с индивидуальными приводами, обеспечивающих перемещение носителя по заданной траектории, а также комплект аппаратуры управления и связи. Система приводных устройств содержит две лебедки с индивидуальными приводами и гибкими тягами, расположенные выше предполагаемой траектории перемещения мишени, а подвижный носитель выполнен с весом, обеспечивающим натяжение гибких тяг приводных устройств. Гибкие тяги могут быть выполнены из прозрачного материала или из лент с ориентацией их кромок перпендикулярно плоскости заданного перемещения носителя. Приводы расположены на расстоянии друг от друга не меньшем ширины мишенного пространства. Гибкие тяги расположены под углом к горизонтальной поверхности. Технический результат – упрощение конструкции и программного обеспечения аппаратуры управления. 2 з.п. ф-лы, 5 ил.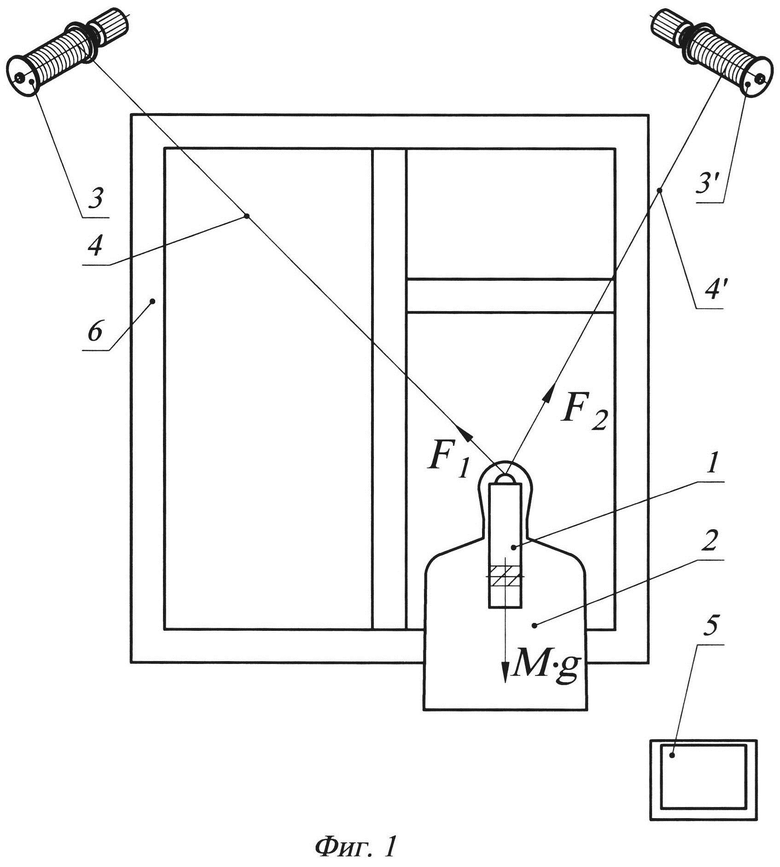
1. Устройство для управления перемещением подвижной мишени в вертикальной плоскости, содержащее носитель, размещенное на нем силуэтное изображение объекта поражения, систему приводных устройств с гибкими тягами - лебедок с индивидуальными приводами, обеспечивающих перемещение носителя по заданной траектории, а также комплект аппаратуры управления и связи, отличающееся тем, что система приводных устройств содержит две лебедки с индивидуальными приводами, расположенные выше предполагаемой траектории перемещения мишени на расстоянии друг от друга не меньшем ширины мишенного пространства, и гибкими тягами, направленными под углом к горизонтальной поверхности, а подвижный носитель выполнен с весом, обеспечивающим натяжение гибких тяг приводных устройств.
2. Устройство по п. 1, отличающееся тем, что гибкие тяги выполнены из прозрачного материала.
3. Устройство по п. 1, отличающееся тем, что гибкие тяги выполнены из лент с ориентацией их кромок перпендикулярно плоскости заданного перемещения носителя.
| Способ управления перемещением подвижной мишени и устройство для его осуществления | 2016 |
|
RU2620245C1 |
| 0 |
|
SU153104A1 | |
| Предварительно напряженный железобетонный элемент | 1949 |
|
SU85224A1 |
| Устройство для измерения температуры | 1980 |
|
SU861974A1 |
| Облицовочная смесь для изготовления литейных форм и стержней | 1988 |
|
SU1563836A1 |
| СПОСОБ ПОИСКОВ РУДНЫХ МЕСТОРОЖДЕНИЙ ПО МИКРОАМАЛЬГАМАМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2427010C2 |

