Изобретение относится к области авиационного двигателестроения и может быть использовано в электронно-гидромеханических системах автоматического управления многорежимными газотурбинными двигателями (ГТД).
Наиболее близким к заявленному изобретению по технической сущности и достигаемому техническому результату является способ управления газотурбинным двигателем, заключающийся в рулении самолета к взлетной полосе и увеличении тяги его двигателя в процессе разбега, отличающийся тем, что непрерывно в процессе руления и разбега самолета измеряют его истинную скорость и соответственно ее значению изменяют расход воздуха через воздухозаборник двигателя путем регулирования частоты вращения ротора низкого давления до экспериментально определенного при испытаниях предела допустимых значений, при которых на данной скорости не происходит образование вихревого шнура между воздухозаборником и поверхностью аэродрома, причем регулирование частоты вращения ротора низкого давления в зависимости от значений истинной скорости продолжают до выхода двигателя на максимальные режимы его работы.
(см. патент РФ №2325307, B64D 31/12, 2006 г. )
В результате анализа известного способа необходимо отметить, что современные системы измерения воздушной (истинной) скорости обладают низкой точностью измерения в области малых скоростей, на разбеге и рулении самолета. Также стоит отметить, что регулирование частоты вращения ротора компрессора низкого давления в зависимости от истинной скорости не обеспечивает повторяемости характера набора скоростисамолетом от разгона к разгону и существенно зависит от погодных условий, что ухудшает качество управляемости самолета.
Техническим результатом настоящего изобретения является повышение точности поддержания режима работы двигателя при разбеге самолета, стабилизация процесса набора тяги при различных погодных условиях и улучшение управляемости самолета.
Указанный технический результат обеспечивается тем, что способ управления газотурбинным двигателем самолета на режиме разбега включает непрерывное измерение истинной скорости самолета, изменение расхода воздуха через воздухозаборник двигателя путем регулирования приведенной частоты вращения ротора низкого давления газотурбинного двигателя, причем дополнительно измеряют путевую скорость движения самолета и ограничивают частоту вращения ротора низкого давления в зависимости от путевой скорости, а при отказе измерения путевой скорости ограничение осуществляют в зависимости от истинной скорости самолета.
Существенные признаки могут иметь развитие и продолжение.
При ограничении по истинной скорости и при ограничении по путевой скорости используют одну численную зависимость частоты вращения ротора низкого давления от путевой скорости самолета.
Используемая численная зависимость получена эквидистантным смещением влево на заранее выбранную величину аргумента определенной при испытаниях предельной зависимости частоты вращения ротора компрессора низкого давления от истинной скорости движения самолета, при которых на данной скорости исключается образование вихревого шнура.
Выбранная величина аргумента соответствует максимально возможному превышению значения путевой скорости над истинной.
Сущность заявленного изобретения поясняется графическими материалами, на которых представлены:
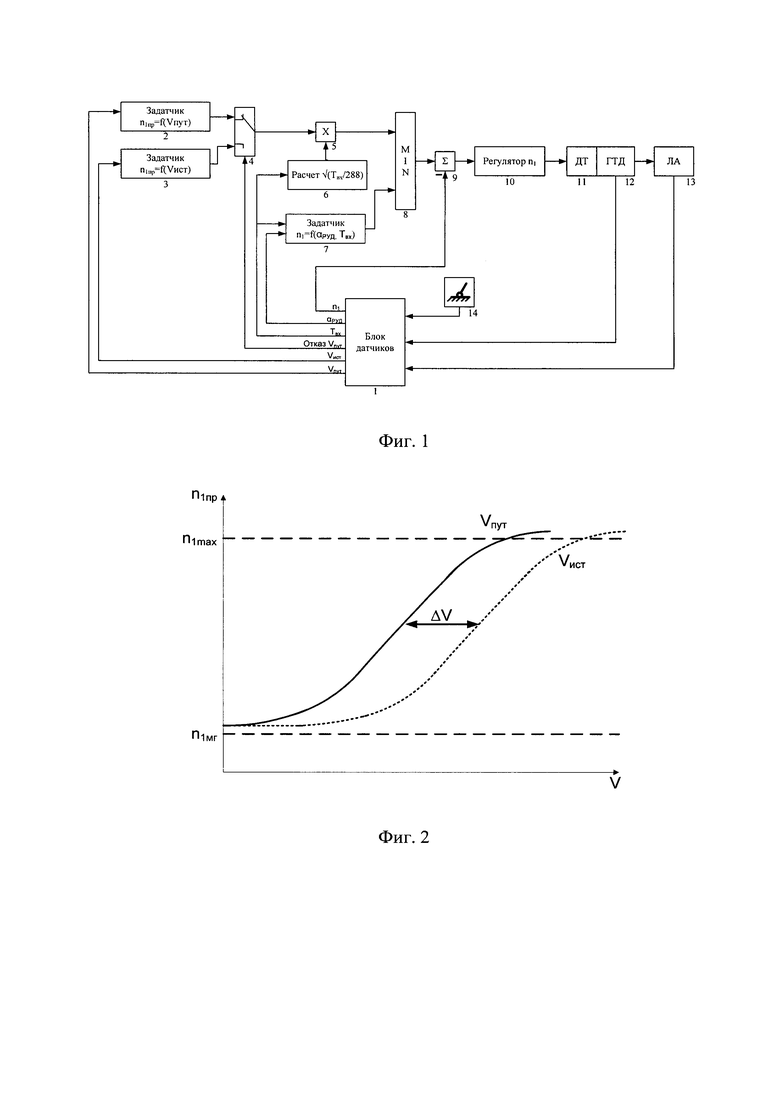
фиг. 1 - система управления, реализующая заявленный способ;
фиг. 2 - пример зависимости предельной частоты вращения ротора компрессора низкого давления от истинной и путевой скоростей летательного аппарата.
Система, реализующая заявленный способ управления, содержит блок 1 датчиков измерения параметров работы ГТД, а именно температуры воздуха на входе в двигатель (Твх), частоты вращения ротора компрессора низкого давления (КНД) (n1), положения рычага управления двигателем (РУД) (αруд). Блок 1 также содержит измерители истинной (Vист) и путевой (Vпут) скоростей движения самолета, а также дискретный выход, сигнализирующий о невозможности измерения путевой скорости («Отказ Vпут»),
Система содержит задатчики 2 и 3 предельной частоты вращения ротора компрессора низкого давления (КНД) в зависимости от путевой и истинной скорости движения самолета соответственно. К входам задатчиков 2 и 3 подключены выходы соответствующих измерителей скоростей.
Выходы задатчиков 2 и 3 подключены к первому и второму входу управляемого переключателя 4 соответственно. Выход переключателя 4 подключен к первому входу мультипликатора 5, к второму входу которого подключен выход блока 6 расчета величины  к входу блока 6 соответственно подключен сигнал датчика Твх.
к входу блока 6 соответственно подключен сигнал датчика Твх.
Система содержит задатчик 7 частоты вращения ротора КНД в зависимости от положения РУД и Твх, к входам задатчика 7 соответственно подключены указанные датчики: положения РУД и температуры воздуха на входе в ГТД.
Выходы мультипликатора 5 и задатчика 7 подключены к первому и второму входам селектора 8 минимального уровня. Выход селектора 8 подключен к первому входу сумматора 9, ко второму (инвертирующему) входу которого подключен сигнал с датчика измерения частоты вращения ротора КНД.
Выход сумматора 9 подключен к регулятору 10 частоты вращения ротора КНД, формирующему расход топлива для поддержания заданной частоты вращения ротора КНД, который через систему дозирования 10 поступает в камеру сгорания (на фиг.не показана) ГТД 12. ГТД установлен на летательном аппарате 13. Режим работы двигателя задается РУД, обозначенным позицией 14.
Состояние переключателя 4 определяется сигналом «Отказ Vпут» от блока 1.
Система может быть скомпонована из известных блоков и элементов.
В качестве датчиков блока 1 могут быть использованы стандартные датчики контроля параметров работы ГТД, например, терморезистивные датчики температуры, стандартные линейные дифференциальные трансформаторы для измерения линейных или угловых перемещений, индуктивные датчики частот вращения. В качестве измерителя истинной скорости движения летательного аппарата может использоваться известный датчик скорости воздушного потока, используемый в системе измерения высот и скоростей. Измеритель путевой скорости самолета может быть построен на основе бесплатформенной инерциальной навигационной системы с применением известных акселерометров.
Задатчики 2 и 3 являются известными матричными устройствами реализации произвольных функциональных зависимостей. Пример функциональных зависимостей предельных приведенных частот вращения от скорости движения самолета показаны на фиг.2.
Переключатель 4 является стандартным и выбран таким образом, что при подаче на его управляющий вход сигнала логической единицы он подключает к своему выходу второй вход, соответственно при наличии на управляющем входе сигнала логической единицы к его выходу подключен его первый вход.
Мультипликатор 5, сумматор 9, селектор 8 минимального уровня являются стандартными. Второй вход сумматора 9 является инвертирующим.
Задатчик 7 является известным матричным устройством реализации произвольных функциональных зависимостей и реализует следующую известную функцию:
n1=f(ТВХ, αРУД).
В качестве регулятора 10 может быть использован стандартный ПИД-регулятор с подключенным к его выходу интегратором. Способ осуществляется следующим образом.
При безотказной работе системы измерения путевой скорости на дискретном выходе блока 1 формируется сигнал логического нуля. В соответствии с ним переключатель 4 подключает к своему выходу свой первый вход, к первому входу мультипликатора 5 оказывается подключен выход задатчика 2.
Задатчик 2 в соответствии с выбранной зависимостью формирует предельное значение приведенной частоты вращения ротора КНД при текущей путевой скорости самолета для исключения образования вихревого шнура и засасывания в двигатель частиц с поверхности аэродрома.
Так как задатчиком 2 (и задатчиком 3) формируется приведенная частота вращения ротора КНД, а для работы регулятору 10 необходима ее физическая величина, на мультипликаторе 5 происходит «расприведение» сигнала, т.е. перевод параметра обратно из приведенной величины в ее физическое значение, по формуле:
где
n1 - выходная величина мультипликатора 4 - физическая частота вращения ротора КНД, соответствующая n1пp;
n1пp - приведенная частота вращения ротора КНД, сформированная задатчиком 2 (или задатчиком 3, в случае отказа);
 - комплекс подобия, рассчитанный блоком 6.
- комплекс подобия, рассчитанный блоком 6.
Режим работы ГТД 12 задается РУД 14.
В соответствии с положением РУД 14 и текущей температурой воздуха на входе в ГТД задатчик 7 по известной зависимости формирует заданную частоту вращения ротора КНД.
При этом, если частота сформированная задатчиком 7 оказывается выше предельной частоты вращения, сформированной блоками 2-4-5, то на выход селектора 8 минимального уровня пройдет сигнал с мультипликатора 5.
Сумматор 9 формирует рассогласование заданной и фактической (по сигналу датчика частоты вращения ротора КНД) частот вращения ротора КНД, регулятор 10 формирует расход топлива и через систему дозирования 11 подает его в КС ГТД 12 для поддержания заданной частоты вращения.
Таким образом, на вход регулятора всегда будет поступать наименьшее из значений заданных частот: по РУД (от задатчика 7) и по путевой скорости (от задатчика 2).
Вне зависимости от характера движения РУД при разбеге самолета система всегда будет ограничивать расход воздуха через двигатель максимальным расходом согласно текущей скорости для предотвращения засасывания частиц с поверхности аэродрома.
Так как расчет ограничения ведется согласно путевой скорости, которая не зависит от порывов ветра и положения самолета по отношению к ветру на взлетно-посадочной полосе, то при одинаковом характере перемещения РУД, характер изменения скорости будет одинаковым.
В случае отказа системы измерения путевой скорости на дискретном выходе блока 1 сформируется сигнал логической единицы, который приведет к изменению состояния переключателя 4: к выходу переключателя окажется подключен его второй вход. Таким образом, к первому входу мультипликатора 5 окажется подключен сигнал задатчика 3. Задатчик 3 формирует аналогичную задатчику 2 зависимость приведенной частоты вращения ротора КНД от истинной скорости движения самолета.
В остальном система будет работать аналогично.
Таким образом, система при работе по датчику путевой скорости стабилизирует процесс набора тяги двигателя и разгон летательного аппарата при различных погодных условиях, что улучшает управляемость самолета и обеспечивает защиту двигателя от попадания посторонних предметов с поверхности полосы аэродрома.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления газотурбинным двигателем самолета на режимах руления и разбега | 2023 |
|
RU2829124C1 |
| Способ управления перепуском воздуха из компрессора низкого давления турбореактивного двухвального двигателя с высокой степенью двухконтурности | 2024 |
|
RU2836207C1 |
| Способ управления двухвальным газотурбинным двигателем с регулируемыми направляющими аппаратами компрессоров высокого и низкого давления | 2021 |
|
RU2778417C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКОНТУРНЫМ ДВУХВАЛЬНЫМ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347093C2 |
| Способ управления подачей топлива в камеру сгорания газотурбинного двигателя | 2022 |
|
RU2786969C1 |
| Способ управления площадью критического сечения реактивного сопла двухвального двухконтурного газотурбинного двигателя | 2023 |
|
RU2823004C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ НА ПРЕРВАННОМ ВЗЛЕТЕ САМОЛЕТА | 2024 |
|
RU2837365C1 |
| СПОСОБ УПРАВЛЕНИЯ СИЛОВОЙ УСТАНОВКОЙ САМОЛЕТА | 2005 |
|
RU2306446C1 |
| Способ запуска камеры сгорания газотурбинного двигателя | 2022 |
|
RU2786964C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННОЙ УСТАНОВКОЙ | 2009 |
|
RU2427722C1 |
Изобретение относится к области авиационного двигателестроения. Способ управления газотурбинным двигателем самолета на режиме разбега включает непрерывное измерение истинной скорости самолета, изменение расхода воздуха через воздухозаборник двигателя путем регулирования приведенной частоты вращения ротора низкого давления газотурбинного двигателя. Дополнительно измеряют путевую скорость движения самолета и ограничивают частоту вращения ротора низкого давления в зависимости от путевой скорости, а при отказе измерения путевой скорости ограничение осуществляют в зависимости от истинной скорости самолета. Технический результат - повышение точности поддержания режима работы двигателя при разбеге самолета, стабилизация процесса набора тяги при различных погодных условиях и улучшение управляемости самолета. 3 з.п. ф-лы, 2 ил.
1. Способ управления газотурбинным двигателем самолета на режиме разбега, включающий непрерывное измерение истинной скорости самолета, изменение расхода воздуха через воздухозаборник двигателя путем регулирования приведенной частоты вращения ротора низкого давления газотурбинного двигателя, отличающийся тем, что дополнительно измеряют путевую скорость движения самолета и ограничивают частоту вращения ротора низкого давления в зависимости от путевой скорости, а при отказе измерения путевой скорости ограничение осуществляют в зависимости от истинной скорости самолета.
2. Способ по п. 1, отличающийся тем, что при ограничении по истинной скорости и при ограничении по путевой скорости используют одну численную зависимость частоты вращения ротора низкого давления от путевой скорости самолета.
3. Способ по п. 2, отличающийся тем, что используемая численная зависимость получена эквидистантным смещением влево на заранее выбранную величину аргумента определенной при испытаниях предельной зависимости частоты вращения ротора компрессора низкого давления от истинной скорости движения самолета, при которых на данной скорости исключается образование вихревого шнура.
4. Способ по п. 3, отличающийся тем, что выбранная величина аргумента соответствует максимально возможному превышению значения путевой скорости над истинной.
| СПОСОБ ВЗЛЕТА САМОЛЕТА | 2006 |
|
RU2325307C1 |
| СПОСОБ ЗАЩИТЫ КОМПРЕССОРА ПРИ НЕУСТОЙЧИВОЙ РАБОТЕ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2003 |
|
RU2255247C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ УСТРОЙСТВОМ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ ПРИ ПОСАДКЕ И ПРЕРВАННОМ ВЗЛЕТЕ САМОЛЕТА | 2019 |
|
RU2730731C1 |

