Изобретение относится к захвату для автоматизированного монтажа кабеля между электрическими компонентами электрического коммутационного устройства, имеющему по меньшей мере два захватных пальца. Подобный захват известен из US 8113557 В2.
При изготовлении коммутационных и управляющих устройств монтаж кабелей между электрическими компонентами является одним из центральных и требующих много времени рабочих процессов, который до сегодняшнего дня в максимальной мере выполняется вручную. При этом большие требования к выполняющему такой монтаж лицу предъявляет не только высокая сложность этого рабочего процесса, но, прежде всего, также требование о стопроцентном отсутствии дефектов.
Для оптимизации процесса монтажа кабелей имеются различные технические средства с разными уровнями поддержки. Они простираются от ручных инструментов и/или полуавтоматов для изготовления кабелей вплоть до полностью автоматических установок, которые полностью изготавливают отдельные провода, то есть отрезают по длине, снимают изоляцию, наносят гильзы для оконцевания жил и обжимают. Изготовленные таким образом, полностью готовые кабели могут вслед за этим выдаваться в виде свободного и отдельного провода, в виде последовательно соединенных друг с другом или расположенных в ряд проводов или в виде жгута проводов.
Из публикации DE 102015103444 А1 известна намотанная на ролик последовательность кабелей. В публикации BE 101965 1А описана многофункциональная обрабатывающая головка, которая интегрирована в исполнительный орган установки для монтажа кабеля. В публикациях DE 4431254 А1 и ЕР 0917259 В1 описан соответственно способ и приспособление для соединения проводами точек присоединения компонентов электрических устройств. В публикации ЕР 0259394 В1 описан инструмент для прокладки кабелей. В публикации WO 2018/189103 А1 показана обрабатывающая головка, а также установка и способ для автоматизированной комплектации корпусов штекера с проводящими элементами. Из публикации ЕР 1447888 А1 известен захват для устройства для обработки кабелей. В публикации ЕР 0440955 В1 описано устройство для автоматического монтажа электрических проводников с контактными элементами в корпусах штекера.
В опубликованной позднее германской заявке 102018133337.4 на получение патента от 21 декабря 2018 г. описан способ монтажа кабеля между электрическими компонентами расположенного на монтажной плате электрического коммутационного устройства с помощью робота с сочлененной рукой, который имеет на своем исполнительном органе захват с двумя, перемещаемыми относительно друг друга захватными пальцами. Для того чтобы создать условия для надежного в работе манипулирования провисающими с изгибом кабелями, предлагается коллаборативная захватная система, в которой робот с сочлененной рукой каждым из захватов на своем исполнительном органе держит соответственно один из обоих противоположных концов подлежащего проводному монтажу кабеля. Однако, эти системы являются соответственно сложными и тем самым затратными и дорогорасположенными в изготовлении.
Задача изобретения состоит в том, чтобы усовершенствовать захват описанного в начале типа таким образом, чтобы он позволял с помощью простых технических средств манипулировать провисающими с изгибом кабелями и прочими проводами с целью монтажа кабелей в электрических коммутационных устройствах.
Данная задача решена в захвате с признаками п. 1 формулы изобретения. В независимом п. 10 формулы изобретения описан соответствующий робот, а в независимом п. 11 формулы изобретения соответствующий способ. Предпочтительные формы выполнения являются соответственно предметом зависимых пунктов формулы изобретения.
Предлагаемый в изобретении захват для автоматизированного монтажа кабеля между электрическими компонентами электрического коммутационного устройства содержит по меньшей мере два захватных пальца, установленных с образованием между собой прохода для проводки кабеля, пропускной поперечный размер которого на дистальном конце захватных пальцев ограничен расположенными напротив друг друга зажимными губками захватных пальцев, при этом захватные пальцы связаны с исполнительным механизмом для перемещения захватных пальцев относительно друг друга с возможностью варьирования пропускного поперечного размера прохода. В соответствии с изобретением захват снабжен приводными механизмами для продвижения кабеля, установленными напротив друг друга на каждом из захватных пальцев проксимально по отношению к дистальному концу захватного пальца, а упомянутый исполнительный механизм выполнен в виде линейного исполнительного механизма для перемещения пальцев в направлении перемещения, перпендикулярном их продольному направлению.
Вследствие того, что существенные компоненты захвата, а именно расположенные напротив друг друга зажимные губки для удержания кабеля, прежде всего конца кабеля, а также расположенные напротив друг друга приводные механизмы захватных пальцев, сами ограничивают проход для проводки кабеля и с помощью линейного исполнительного механизма являются линейно перемещаемыми относительно друг друга для варьирования пропускного поперечного размера прохода для проводки кабеля, захват согласно изобретению имеет небольшую сложность.
Каждый из захватных пальцев на своем проксимальном конце может быть соединен с исполнительным звеном линейного исполнительного механизма и простираться перпендикулярно плоскости перемещения исполнительного звена.
Может быть предусмотрено, что по меньшей мере один из приводных механизмов по меньшей мере одного из захватных пальцев имеет по меньшей мере один приводной вращательный элемент, причем расположенные напротив друг друга приводные вращательные элементы обоих захватных пальцев имеют встречное направление вращения. Оба приводных вращательных элемента могут иметь, например, по принципу ленточного пресса по меньшей мере две расположенные напротив друг друга прижимные ленты, которые направлены друг к другу с образованием зазора между валками. В случае если между валками не размещен кабель, валки могут также прилегать друг к другу. Валки предпочтительно имеют на своем внешнем периметре идентичную и встречную скорость вращения. Пока достигается названный ранее принцип, приводные вращательные элементы принципиально не ограничены определенной формой выполнения. Соответственно этому в качестве примера следует упомянуть, что приводные вращательные элементы могут иметь по меньшей мере один ролик, по меньшей мере один валок и/или по меньшей мере одну транспортерную ленту. Пара расположенных напротив друг друга приводных вращательных элементов, прежде всего, может иметь, например, на каждый приводной вращательный элемент по меньшей мере один ролик, по меньшей мере один валок и/или по меньшей мере одну транспортерную ленту.
Расположенные напротив друг друга приводные механизмы могут быть перемещаемыми и могут иметь механический предварительный натяг, преимущественно пружинный предварительный натяг, в направлении перемещения захватных пальцев. Таким образом может обеспечиваться оказание приводными механизмами постоянного равномерного давления прижатия на подлежащий транспортировке кабель независимо от поперечного сечения обрабатываемого кабеля и вместе с тем создание надежного трения сцепления между кабелем и приводными механизмами. Точно так же таким образом может обеспечиваться, что при переводе захватных пальцев из положения приема кабеля, в котором зажимные губки расположены с образованием между собой прохода, пропускной поперечный размер которого больше размера поперечного сечения кабеля или размера поперечного сечения элемента обработки конца кабеля, в положение транспортировки кабеля, в котором зажимные губки ограничивают между собой пропускной поперечный размер прохода до размера поперечного сечения кабеля или до большего размера, чем этот, который, преимущественно, меньше, чем размер поперечного сечения элемента обработки конца кабеля, приводные механизмы состоят в контакте с кабелем и имеют необходимое для привода кабеля трения сцепления с кабелем.
Прежде всего, при обработке длинных кабелей может быть целесообразным отводить с захвата принятый захватом кабель под контролем. Для этого в одной форме выполнения может быть предусмотрено, что захват имеет на проксимальной стороне расположенных напротив друг друга приводных механизмов кабелепровод, имеющий выход в проход. Кабелепровод может быть, например, пустотелой трубкой. Сторона выпуска кабеля может быть проксимальным проемом зазора между валками, который образован между обоими приводными механизмами.
Каждая из расположенных напротив друг друга зажимных губок может быть установлена с возможностью поворота вокруг оси, простирающейся в направлении перемещения захватных пальцев. Расположенные напротив друг друга зажимные губки могут быть установлены с возможностью поворота вокруг оси в одинаковом направлении между двумя положениями, разнесенными на угол до 180°, например между двумя положениями, разнесенными на 180°. Тем не менее, зажимные губки могут поворачиваться вокруг вышеупомянутой оси, прежде всего, также на любой угол между 0° и 180°.
Каждая из зажимных губок может иметь на своих противоположных по отношению к оси продольных концах по зажимному концу, причем в обоих разнесенных, в частности на 180°, положениях зажимной губки один из ее зажимных концов является дистальным концом соответствующего захватного пальца, а другой зажимной конец, находящийся с противоположной по отношению к оси стороны, обращен в сторону приводных механизмов. Зажимные губки, преимущественным образом, выполнены симметричными относительно оси. Расположенные напротив друг друга зажимные губки могут быть выполнены как ответные зажимные губки, расположенные напротив друг друга зажимные губки, прежде всего, могут иметь входящие друг в друга ответно контуры. Входящие друг в друга зажимные губки могут образовывать между собой проход для проводки кабеля с пропускным поперечным размером, который может настраиваться посредством перемещения захватных пальцев с помощью линейного исполнительного механизма. Может быть предусмотрено, что даже в положении транспортировки кабеля, в котором зажимные губки ограничивают между собой пропускной поперечный размер прохода до размера поперечного сечения кабеля или до большего размера, чем этот, который, преимущественно, меньше, чем размер поперечного сечения элемента обработки конца кабеля, расположенные напротив друг друга ответные зажимные губки всегда еще частично входят друг в друга, причем они ограничивают по периметру проход для проводки кабеля, так что размещенный между зажимными губками в проходе для проводки кабеля кабель надежно держится между зажимными губками.
Линейный исполнительный механизм может быть выполнен с возможностью установки захватных пальцев на выбор по меньшей мере в одно из приведенных ниже положений относительно друг друга:
а) положение удержания кабеля, в котором зажимные губки ограничивают между собой пропускной поперечный размер прохода до размера поперечного сечения кабеля, до размера поперечного сечения элемента обработки конца кабеля или до меньшего размера, чем указанные,
б) положение транспортировки кабеля, в котором зажимные губки ограничивают между собой пропускной поперечный размер прохода до размера поперечного сечения кабеля или до большего размера, чем этот, который, преимущественно, меньше, чем размер поперечного сечения элемента обработки конца кабеля, и
в) положение приема кабеля, в котором зажимные губки расположены с образованием между собой прохода, пропускной поперечный размер которого больше размера поперечного сечения кабеля или размера поперечного сечения элемента обработки конца кабеля.
Захватные пальцы могут перемещаться относительно друг друга исключительно с помощью линейного исполнительного механизма. За счет этого обеспечивается большая надежность процесса.
Согласно другому аспекту изобретение относится к роботу, преимущественно к роботу с сочлененной рукой, как он известен, например, из опубликованной позднее германской заявки 102018133337.4 на получение патента, который имеет захват описанного ранее типа.
Согласно еще одному другому аспекту изобретение относится к способу автоматизированного монтажа кабеля между электрическими компонентами электрического коммутационного устройства, включающему следующие этапы:
а) извлечение с помощью предлагаемого в изобретении захвата или предлагаемого в изобретении робота по меньшей мере частично предварительно изготовленного кабеля из переходного устройства для передачи кабеля,
б) приведение первого конца кабеля в контакт с первым местом контакта первого электрического компонента электрического коммутационного устройства, прокладка кабеля от первого места контакта ко второму месту контакта второго электрического компонента электрического коммутационного устройства и приведение второго конца кабеля в контакт со вторым местом электрического контакта.
В соответствии с изобретением при извлечении кабеля из переходного устройства для передачи кабеля осуществляют следующие этапы:
в) перевод захватных пальцев с помощью линейного исполнительного механизма в положение приема кабеля, в котором зажимные губки располагают с образованием между ними прохода, пропускной поперечный размер которого больше размера поперечного сечения кабеля или размера поперечного сечения элемента обработки конца кабеля,
г) введение второго конца кабеля через дистальный конец захватных пальцев и зажимные губки с расширенным пропускным поперечным расстоянием между ними в проход для проводки кабеля до тех пор, пока второй конец кабеля не дойдет до приводных механизмов, и
д) транспортировка кабеля в проходе для проводки кабеля, пока первый конец кабеля не дойдет до зажимных губок.
Когда первый конец кабеля достигает зажимных губок, он может удерживаться зажимными губками и описанным ранее образом вводиться в контакт с первым местом контакта первого электрического компонента. Во время следующей за этим прокладки кабеля от первого места контакта ко второму месту контакта кабель может через проход для проводки кабеля снова выступать из захвата, причем в случае необходимости кабель с помощью привода кабеля выводится из прохода для проводки кабеля до тех пор, пока второй конец кабеля не достигнет зажимных губок.
После прокладки кабеля от первого места контакта до второго места контакта и перед приведением второго конца кабеля в контакт со вторым местом электрического контакта может быть предусмотрено, что расположенные напротив друг друга зажимные губки поворачиваются в одном направлении на 180° или, в определенных случаях, также на другой угол от 0° до 360°, чтобы располагать второй конец кабеля на дистальном конце захвата, так что второй конец кабеля может подводиться ко второму электрическому компоненту и приводиться в контакт с ним.
На этапе транспортировки кабеля можно переводить захватные пальцы с помощью линейного исполнительного механизма из положения приема кабеля в положение транспортировки кабеля, в котором зажимные губки ограничивают между собой пропускной поперечный размер прохода до размера поперечного сечения кабеля или до большего размера, чем этот, который, преимущественно, меньше, чем максимальный размер поперечного сечения элемента обработки конца кабеля, с возможностью проведения конца кабеля между зажимными губками.
На этапе приведения в контакт первого и/или второго конца кабеля можно переводить захватные пальцы с помощью линейного исполнительного механизма в положение удержания кабеля, в котором зажимные губки ограничивают между собой пропускной поперечный размер прохода до размера поперечного сечения кабеля, до размера поперечного сечения элемента обработки конца кабеля или до меньшего размера, чем указанные, с возможностью удержания конца кабеля между зажимными губками.
Другие подробности изобретения разъясняются с помощью приведенных ниже фигур. При этом показано на:
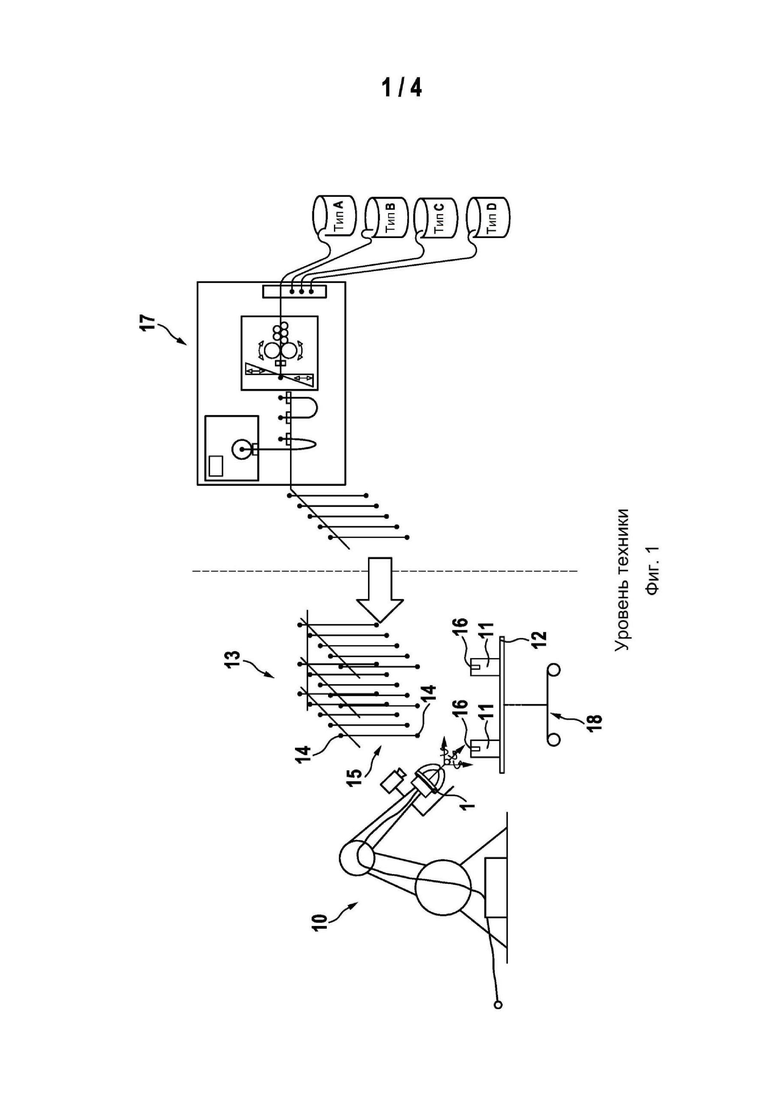
Фиг. 1 структура для предварительного изготовления и монтажа кабеля предварительно изготовленных кабелей с помощью робот с сочлененной рукой согласно уровню техники,
Фиг. 2 вид сбоку на форму выполнения захвата согласно изобретению, который, например, может применяться в качестве захвата в структуре согласно фиг.1,
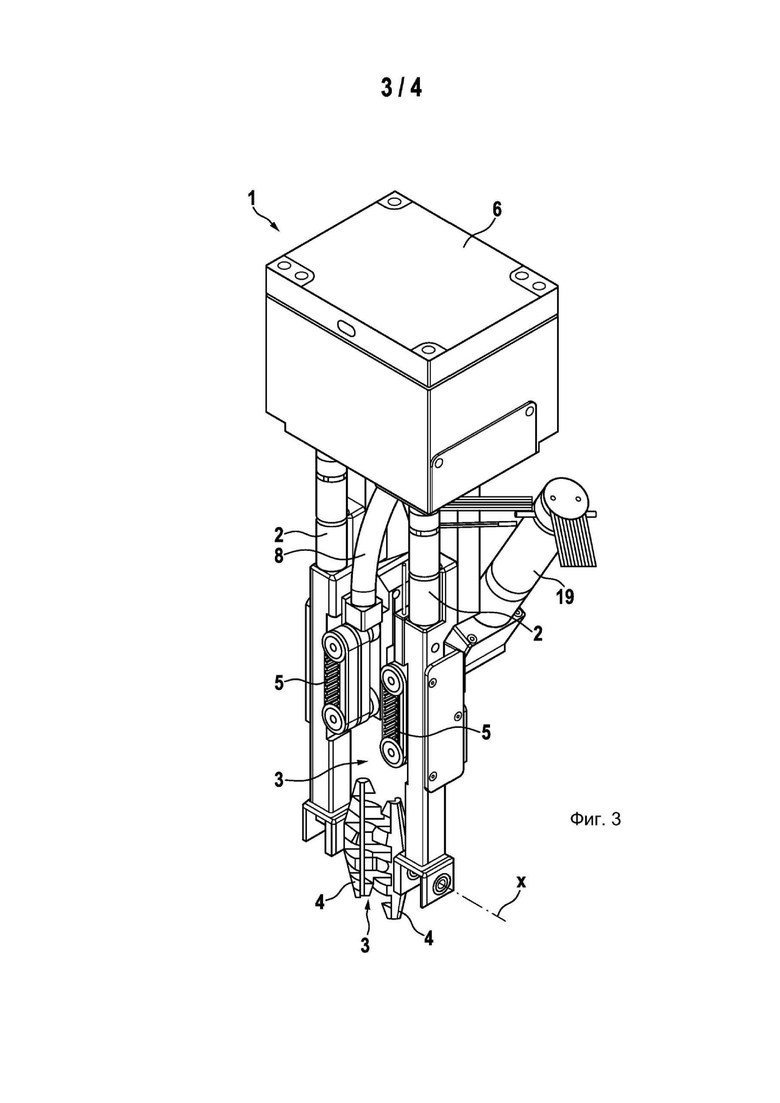
Фиг. 3 вид на захват согласно фиг.2 в перспективе, и
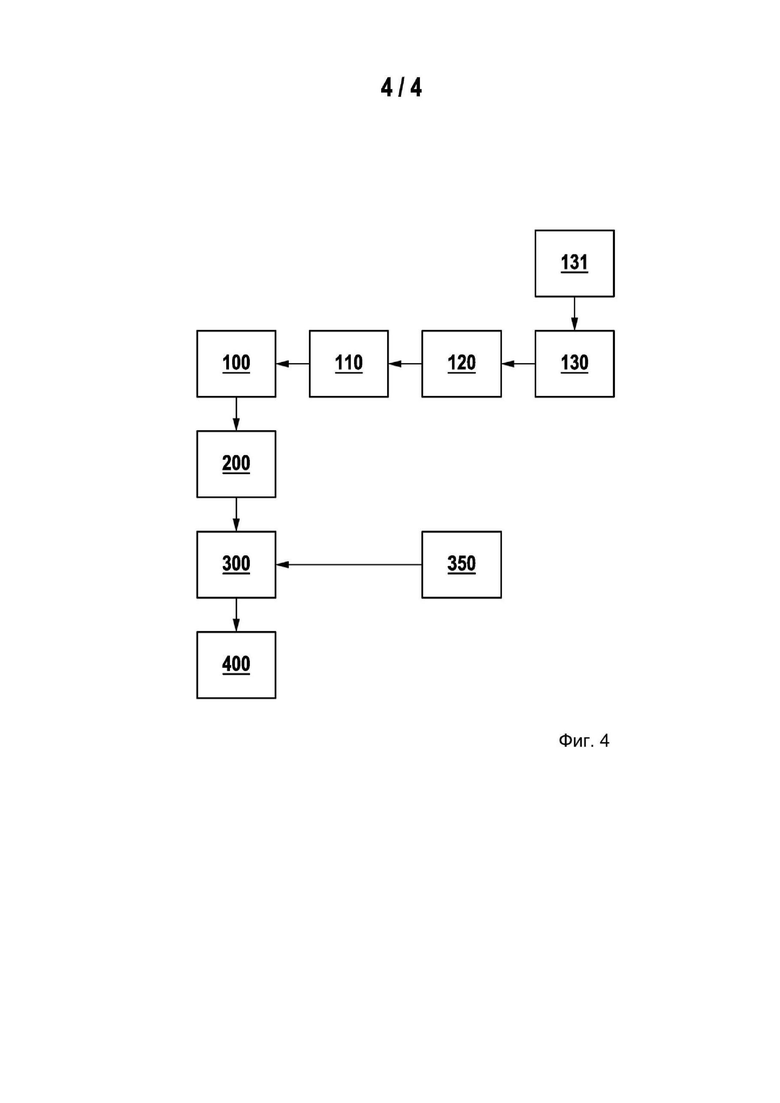
Фиг. 4 схематическая диаграмма последовательности этапов в способе согласно изобретению.
На фиг.1 показана примерная структура для монтажа кабеля между электрическими компонентами 11 выполненного на монтажной плате 12 электрического коммутационного устройства. С помощью транспортировочной тележки 18 монтажная плата 12 удерживается в горизонтальной ориентации, так что с помощью робота 10 с сочлененной рукой с захватом 1 сверху может осуществляться доступ к компонентам 11 с целью подвода кабеля, приведения в контакт и при необходимости с целью обеспечения качества. Альтернативно, в зависимости от формы выполнения монтажная плата 12 может быть ориентирована под углом к горизонтали.
Робот 10 с сочлененной рукой имеет исполнительный орган с захватом 1, с помощью которого предварительно изготовленные кабели 15 могут извлекаться из переходного устройства 13 для передачи кабеля и подводиться к компонентам 11 с целью приведения в контакт. Предварительно изготовленные кабели 15 могут изготавливаться с помощью автомата 17 для изготовления кабеля, как он принципиально известен из уровня техники.
На первом этапе робот 10 с помощью своего захвата 1 извлекает из переходного устройства 13 первый из предварительно изготовленных кабелей 15, захватывая этот кабель 15 за один из его противоположных, предварительно подготовленных концов 14 кабеля. Вслед за этим удерживаемый конец 14 кабеля подводится к первому месту 16 контакта первого электрического компонента 11 и приводится в контакт с ним. После того как первый конец 14 кабеля был приведен в контакт с первым местом 16 контакта, кабель 15 прокладывается от первого места 16 контакта ко второму месту 16 контакта второго электрического компонента 11 электрического коммутационного устройства, и второй конец 14 кабеля приводится в контакт со вторым местом 16 электрического контакта.
При этом является проблематичным то, что во время приведения в контакт и прокладки кабеля 15 кабелем 15, как провисающим с изгибом конструктивным элементом, необходимо маневрировать таким образом, чтобы этот кабель не спутывался с электрическими компонентами 11 электрического коммутационного устройства или с другими структурами на монтажной плате 12. Поэтому для достижения высокой надежности процесса требуется точная проводка кабеля на протяжении всего хода процесса, начиная с извлечения кабеля 11 из переходного устройства 13 вплоть до приведения второго конца кабеля в контакт со вторым местом 16 контакта второго компонента 11.
Для решения этой проблематики согласно изобретению предлагается захват 1, как он показан согласно примерной форме выполнения на фиг.2 и 3. Захват 1 имеет первый и второй захватные пальцы 2, которые являются исключительно линейно перемещаемыми относительно друг друга с помощью линейного исполнительного механизма 6 таким образом, что они варьируют свое расстояние друг до друга перпендикулярно своему продольному направлению. Между захватными пальцами 2 образован проход 3 для проводки кабеля, который с одной стороны ограничен ответными зажимными губками 4 на находящихся напротив друг друга сторонах захватных пальцев 2, а с другой стороны - расположенными напротив друг друга приводными механизмами 5 для продвижения кабеля. На своем проксимальном конце проход 3 выходит в кабелепровод 8, который может быть выполнен, например, в виде пустотелой трубки, через которую введенный в пустотелую трубку кабель может надежно отводиться от захвата 1.
Приводные механизмы 5 выполнены в виде расположенных напротив друг друга транспортерных лент, каждая из которых натянута с помощью пары приводных вращательных элементов 7. Для оптимального прижатия кабеля являются мыслимыми также дополнительные прижимные ролики между приводными вращательными элементами 7. Приводные вращательные элементы 7 могут быть выполнены, например, в виде зубчатых колес, причем по меньшей мере один из обоих приводных вращательных элементов 7 на каждый приводной механизм 5 приводится в действие с помощью двигателя 19. Окружающие зубчатые колеса транспортерные ленты могут быть выполнены наподобие зубчатого ремня с расположенными на внутренней стороне возвышениями, которые входят в зацепление с соответствующими выемками зубчатых колес 7. Оба приводных механизма 5 для продвижения кабеля могут приводиться в движение во встречных направлениях и с одинаковой скоростью.
В то время как на фиг.2 и 3 захват 1 показан в положении приема кабеля, в котором зажимные губки расположены с образованием между собой прохода 3, пропускной поперечный размер которого больше размера поперечного сечения кабеля, чтобы создать условия для введения кабеля через дистальные зажимные концы D зажимных губок 4 вплоть до приводных механизмов 5, захватные пальцы 2 с помощью линейного исполнительного механизма 6 могут приближаться друг к другу, вследствие чего пропускной поперечный размер прохода 3 для проводки кабеля сужается. В положении транспортировки кабеля зажимные губки 4 могут ограничивать между собой пропускной поперечный размер прохода 3 для проводки кабеля до размера поперечного сечения кабеля или до несколько большего размера, чем этот. Прежде всего, может быть предусмотрено, что в положении транспортировки кабеля пропускной поперечный размер прохода меньше, чем размер поперечного сечения элемента обработки конца кабеля, так что при транспортировке кабеля через суженный в описанном перед этим положении проход 3 для проводки кабеля кабель своим, находящимся с конечной стороны элементом обработки конца жилы упирается в дистальный конец D зажимных губок 4.
Захват 1 имеет по одному двигателю 19 на каждый захватный палец 2 для приведения в действие предназначенного для каждого из захватных пальцев 2 приводного механизма 5.
Расположенные напротив друг друга зажимные губки 4 являются поворачиваемыми относительно друг друга соответственно вокруг простирающейся в направлении у перемещения захватных пальцев 2 оси х. С помощью сервоприводов 22, например серводвигателей, каждый из которых через шпиндель (не показан), который приводит в действие передаточный механизм 20, связан соответственно с одной из зажимных губок 4, зажимные губки 4, прежде всего, могут поворачиваться вокруг оси х в одинаковом направлении и между двумя повернутыми относительно друг друга на 180° положениями. При этом каждая из зажимных губок 4 имеет на своих находящихся напротив друг друга по отношению к оси х продольных концах по прижимному концу 9, из которых в обоих перемещенных относительно друг друга на 180° положениях соответственно один из прижимных концов 9 является дистальным концом D своего соответствующего захватного пальца 2, а соответственно другой захватный конец 9 на противоположной по отношению к оси х стороне обращен в сторону приводных механизмов 5 для продвижения кабеля. Каждая из зажимных губок выполнена симметричной относительно оси х.
Приводные механизмы 5, прежде всего приводные вращательные элементы 7 приводных механизмов 5, связаны с датчиком 21 нагрузки, с помощью которого через возрастающую нагрузку на приводящие в действие приводные механизмы 5 двигатели 19 может констатироваться, что конец кабеля находится в области захвата приводных механизмов 5. Конец кабеля может иметь, например, элемент обработки конца кабеля, который имеет большее поперечное сечение, чем расположенный между приводными механизмами 5 кабель, так что на входе между обоими приводными механизмами 5 элемент обработки конца кабеля упирается в ограниченный между приводными механизмами 5 проход 3 для проводки кабеля и представляет собой регистрируемое за счет возрастания нагрузки сопротивление. Если датчик 21 нагрузки зарегистрировал возрастание нагрузки, то в ответ на это может быть осуществлено управление двигателями 19, чтобы прервать приведение в действие приводных вращательных элементов 7.
В кратком обзоре фиг.4 вместе с фиг.1-3 описывается предлагаемый способ автоматизированного монтажа кабеля согласно форме выполнения изобретения. Соответственно этому на первом этапе 100 способ включает извлечение с помощью захвата 1 робота 10, по меньшей мере, частично предварительно изготовленного кабеля 15 из переходного устройства 13 для передачи кабеля. На следующем этапе 200 извлеченный кабель 15 может своим первым концом 14 кабеля приводиться в контакт с первым местом 16 контакта первого электрического компонента 11 электрического коммутационного устройства. После приведения 200 в контакт первого конца 14 кабеля кабель 15 на этапе 300 может прокладываться от первого места 16 контакта ко второму месту 16 контакта второго электрического компонента 11 электрического коммутационного устройства. После этого на этапе 400 второй конец 14 кабеля может приводиться в контакт со вторым местом 16 электрического контакта.
При извлечении 100 кабеля 15 из переходного устройства 13 для передачи кабеля на этапе 110 захватный палец 2 может приводиться с помощью линейного исполнительного механизма 6 в положение приема кабеля, в котором зажимные губки 4 располагаются с образованием между ними прохода 3, пропускной поперечный размер которого больше размера поперечного сечения прокладываемого кабеля 15 и размера поперечного сечения элемента обработки конца кабеля 15. Это создает условия для того, чтобы на этапе 120 второй конец 14 кабеля через дистальный конец D захватного пальца 2 и расширенное пропускное поперечное сечение между зажимными губками 4 вводился в проход 3 для проводки кабеля до тех пор, пока второй конец 14 кабеля не дойдет до приводных механизмов 5. Затем, на этапе 130 за счет срабатывания приводных механизмов 5 кабель может транспортироваться в проходе 3 для проводки кабеля, пока первый конец 14 кабеля не достигнет зажимных губок 4. Последнее является возобновляемо регистрируемым описанным ранее образом с помощью датчика 21 нагрузки.
Транспортировка 130 кабеля 15 может включать в себя перевод 131 захватных пальцев 2 с помощью линейного исполнительного механизма 6 из положения приема кабеля в положение транспортировки кабеля, в котором зажимные губки 4 ограничивают между собой пропускной поперечный размер прохода 3 до размера поперечного сечения кабеля или до большего размера, чем этот, который, все же меньше, чем максимальный размер поперечного сечения элемента обработки конца кабеля, что делает возможным проведение кабеля 15 между зажимными губками, пока конец 14 кабеля своим большим элементом обработки конца кабеля, например гильзой для оконцевания жилы, не упрется в дистальный конец D зажимных губок 4.
Приведение 200 в контакт первого и второго конца кабеля может включать в себя перевод 131 захватных пальцев 2 с помощью линейного исполнительного механизма 6 в положение удержания кабеля, в котором зажимные губки 4 ограничивают между собой пропускной поперечный размер прохода 3 до размера поперечного сечения кабеля, до размера поперечного сечения элемента обработки конца кабеля или до меньшего размера, чем указанные, так что конец 14 кабеля удерживается между зажимными губками 4.
После прокладки 300 кабеля 15 от первого места 16 контакта ко второму месту 16 контакта и перед приведением 400 второго конца 14 кабеля в контакт со вторым местом 16 электрического контакта способ может также включать перестановку 350, прежде всего поворот, расположенных напротив друг друга зажимных губок 4 вокруг оси х в одинаковом направлении и на 180°. Это требуется, прежде всего, для того, чтобы прилегающий к зажимным губкам 4 или же захваченный зажимными губками 4 второй конец 14 кабеля доставлять к дистальному концу D захвата 1, так что второй конец 14 кабеля, прежде всего предусмотренный там элемент обработки конца кабеля, может подводиться ко второму месту 16 контакта второго электрического компонента 11.
Раскрытые в настоящем описании, в чертежах, а также в формуле изобретения признаки изобретения могут быть существенными для реализации изобретения как по отдельности, так и в любой комбинации.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 захват
2 захватный палец
3 проход для проводки кабеля
4 зажимные губки
5 приводной механизм
6 линейный исполнительный механизм
7 приводной вращательный элемент
8 кабелепровод
9 зажимной конец
10 робот
11 электрический компонент
12 монтажная плата
13 переходное устройство для передачи кабеля
14 конец кабеля
15 кабель
16 место контакта
17 автомат для изготовления кабеля
18 транспортировочная тележка
19 двигатель
20 передаточный механизм
21 датчик нагрузки
22 сервопривод
23 сторона выпуска кабеля
100 извлечение
110 перевод
120 введение
130 транспортировка
131 перевод
200 приведение в контакт
300 прокладка
350 перестановка
400 приведение в контакт
D дистальный конец
х ось
у направление перемещения
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КРЕПЛЕНИЯ ДЛЯ ИЗОЛИРОВАННОГО ЭЛЕКТРИЧЕСКОГО КАБЕЛЯ, СОДЕРЖАЩАЯ КРЕПЕЖНЫЙ ЗАЖИМ И СОЕДИНИТЕЛЬ ДЛЯ ЭЛЕКТРИЧЕСКОГО СОЕДИНЕНИЯ ИЗОЛИРОВАННОГО ЭЛЕКТРИЧЕСКОГО КАБЕЛЯ С КРЕПЕЖНЫМ ЗАЖИМОМ, И СПОСОБ СБОРКИ УКАЗАННОЙ СИСТЕМЫ | 2013 |
|
RU2546680C1 |
| УСОВЕРШЕНСТВОВАННЫЙ ЭЛЕКТРИЧЕСКИЙ СОЕДИНИТЕЛЬ | 2016 |
|
RU2698470C1 |
| ЗАЖИМНЫЕ ГУБКИ И ЛЕЗВИЯ ДЛЯ КЛЕЩЕЙ ДЛЯ СНЯТИЯ ИЗОЛЯЦИИ, А ТАКЖЕ КЛЕЩИ ДЛЯ СНЯТИЯ ИЗОЛЯЦИИ | 2018 |
|
RU2763396C1 |
| ЗАХВАТЫВАЮЩЕЕ БУРИЛЬНУЮ ШТАНГУ УСТРОЙСТВО | 2014 |
|
RU2660697C2 |
| РУЧНЫЕ КЛЕЩИ ДЛЯ ОБЖАТИЯ | 2021 |
|
RU2835722C1 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2008 |
|
RU2469674C2 |
| КЛЕЩИ ДЛЯ СНЯТИЯ ИЗОЛЯЦИИ | 2018 |
|
RU2763783C2 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| КЛЕЩИ ДЛЯ СНЯТИЯ ИЗОЛЯЦИИ | 2018 |
|
RU2763782C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ НАЛОЖЕНИЯ СКОБОК, СОДЕРЖАЩИЙ МНОГОХОДОВОЙ ВЫТАЛКИВАЮЩИЙ МЕХАНИЗМ С РОТОРНОЙ ПЕРЕДАЧЕЙ | 2005 |
|
RU2434592C2 |

Группа изобретений относится к области робототехники и может быть использована для автоматизированного монтажа кабеля между электрическими компонентами электрического коммутационного устройства. Захват содержит по меньшей мере два захватных пальца, установленных с образованием между собой прохода для проводки кабеля, пропускной поперечный размер которого на дистальном конце захватных пальцев ограничен расположенными напротив друг друга зажимными губками захватных пальцев, при этом захватные пальцы связаны с исполнительным механизмом для перемещения захватных пальцев относительно друг друга с возможностью варьирования пропускного поперечного размера прохода. Кроме того, захват снабжен приводными механизмами для продвижения кабеля, установленными напротив друг друга на каждом из захватных пальцев. Представлены также робот, оснащенный таким захватом, и соответствующий способ автоматизированного монтажа кабеля. Использование изобретений позволяет повысить надежность монтажа кабеля. 3 н. и 11 з.п. ф-лы, 4 ил.
1. Захват (1) для автоматизированного монтажа кабеля между электрическими компонентами (11) электрического коммутационного устройства, содержащий по меньшей мере два захватных пальца (2), установленных с образованием между собой прохода (3) для проводки кабеля, пропускной поперечный размер которого на дистальном конце (D) захватных пальцев (2) ограничен расположенными напротив друг друга зажимными губками (4) захватных пальцев (2), при этом захватные пальцы (2) связаны с исполнительным механизмом для перемещения захватных пальцев (2) относительно друг друга с возможностью варьирования пропускного поперечного размера прохода (3), отличающийся тем, что он снабжен приводными механизмами (5) для продвижения кабеля, установленными напротив друг друга на каждом из захватных пальцев (2) проксимально по отношению к дистальному концу (D) захватного пальца, а упомянутый исполнительный механизм выполнен в виде линейного исполнительного механизма (6) для перемещения пальцев в направлении (у) перемещения, перпендикулярном их продольному направлению.
2. Захват (1) по п. 1, отличающийся тем, что по меньшей мере один из приводных механизмов (5) по меньшей мере одного из захватных пальцев (2) имеет по меньшей мере один приводной вращательный элемент (7), причем расположенные напротив друг друга приводные вращательные элементы (7) обоих захватных пальцев (2) имеют встречное направление вращения.
3. Захват (1) по п. 2, отличающийся тем, что по меньшей мере один из приводных механизмов (5) имеет по меньшей мере один ролик, один валок или одну транспортерную ленту, связанные с каждым приводным вращательным элементом (7).
4. Захват (1) по любому из пп. 1-3, отличающийся тем, что расположенные напротив друг друга приводные механизмы (5) имеют механический предварительный натяг, преимущественно пружинный предварительный натяг, в направлении (у) перемещения захватных пальцев (2).
5. Захват (1) по любому из пп. 1-4, отличающийся тем, что он имеет на проксимальной стороне (23) расположенных напротив друг друга приводных механизмов (5) кабелепровод (8), имеющий выход в проход (3).
6. Захват (1) по любому из пп. 1-5, отличающийся тем, что каждая из расположенных напротив друг друга зажимных губок (4) установлена с возможностью поворота вокруг оси (х), простирающейся в направлении (у) перемещения захватных пальцев.
7. Захват (1) по п. 6, отличающийся тем, что расположенные напротив друг друга зажимные губки (4) установлены с возможностью поворота вокруг оси (х) в одинаковом направлении между двумя положениями, разнесенными на угол до 180°.
8. Захват (1) по п. 7, отличающийся тем, что каждая из зажимных губок (4) имеет на своих противоположных по отношению к оси (х) продольных концах по зажимному концу (9), причем в обоих разнесенных положениях зажимной губки (4) один из ее зажимных концов (9) является дистальным концом (D) соответствующего захватного пальца (2), а другой зажимной конец (9), находящийся с противоположной по отношению к оси (х) стороны, обращен в сторону приводных механизмов (5).
9. Захват (1) по любому из пп. 1-8, отличающийся тем, что линейный исполнительный механизм (6) выполнен с возможностью установки захватных пальцев (2) на выбор по меньшей мере в одно из приведенных ниже положений относительно друг друга:
а) положение удержания кабеля, в котором зажимные губки (4) ограничивают между собой пропускной поперечный размер прохода (3) до размера поперечного сечения кабеля, до размера поперечного сечения элемента обработки конца кабеля или до меньшего размера, чем указанные,
б) положение транспортировки кабеля, в котором зажимные губки (4) ограничивают между собой пропускной поперечный размер прохода (3) до размера поперечного сечения кабеля или до большего размера, чем этот, который преимущественно меньше, чем размер поперечного сечения элемента обработки конца кабеля, и
в) положение приема кабеля, в котором зажимные губки (4) расположены с образованием между собой прохода (3), пропускной поперечный размер которого больше размера поперечного сечения кабеля или размера поперечного сечения элемента обработки конца кабеля.
10. Робот (10) для автоматизированного монтажа кабеля между электрическими компонентами (11) электрического коммутационного устройства, преимущественно с сочлененной рукой, который имеет захват (1) по любому из пп. 1-9.
11. Способ автоматизированного монтажа кабеля между электрическими компонентами (11) электрического коммутационного устройства, включающий следующие этапы:
а) извлечение (100) с помощью захвата (1) по любому из пп. 1-9 или робота (10) по п. 10 по меньшей мере частично предварительно изготовленного кабеля (15) из переходного устройства (13) для передачи кабеля,
б) приведение (200) первого конца (14) кабеля (15) в контакт с первым местом (16) контакта первого электрического компонента (11) электрического коммутационного устройства, прокладка (300) кабеля (15) от первого места (16) контакта ко второму месту (16) контакта второго электрического компонента (11) электрического коммутационного устройства и приведение (400) второго конца (14) кабеля в контакт со вторым местом (16) электрического контакта,
отличающийся тем, что при извлечении (100) кабеля (15) из переходного устройства (13) для передачи кабеля осуществляют следующие этапы:
в) перевод (110) захватных пальцев (2) с помощью линейного исполнительного механизма (6) в положение приема кабеля, в котором зажимные губки (4) располагают с образованием между ними прохода (3), пропускной поперечный размер которого больше размера поперечного сечения кабеля (15) или размера поперечного сечения элемента обработки конца кабеля (15),
г) введение (120) второго конца (14) кабеля через дистальный конец (D) захватных пальцев (2) и зажимные губки (4) с расширенным пропускным поперечным расстоянием между ними в проход (3) для проводки кабеля до тех пор, пока второй конец (14) кабеля не дойдет до приводных механизмов (5), и
д) транспортировка (130) кабеля (15) в проходе (3) для проводки кабеля, пока первый конец (14) кабеля не дойдет до зажимных губок (4).
12. Способ по п. 11, отличающийся тем, что на этапе транспортировки (130) кабеля (15) переводят (131) захватные пальцы (2) с помощью линейного исполнительного механизма (6) из положения приема кабеля в положение транспортировки кабеля, в котором зажимные губки (4) ограничивают между собой пропускной поперечный размер прохода (3) до размера поперечного сечения кабеля или до большего размера, чем этот, который преимущественно меньше, чем максимальный размер поперечного сечения элемента обработки конца кабеля, с возможностью проведения конца (14) кабеля между зажимными губками (4).
13. Способ по п. 11 или 12, отличающийся тем, что на этапе приведения (200) в контакт первого и/или второго конца кабеля (15) переводят (131) захватные пальцы (2) с помощью линейного исполнительного механизма (6) в положение удержания кабеля, в котором зажимные губки (4) ограничивают между собой пропускной поперечный размер прохода (3) до размера поперечного сечения кабеля, до размера поперечного сечения элемента обработки конца кабеля или до меньшего размера, чем указанные, с возможностью удержания конца (14) кабеля между зажимными губками (4).
14. Способ по любому из пп. 11-13, отличающийся тем, что после прокладки (300) кабеля (15) от первого места (16) контакта до второго места (16) контакта и перед приведением (400) второго конца (14) кабеля в контакт со вторым местом (16) электрического контакта расположенные напротив друг друга зажимные губки (4) поворачивают (350) в одном направлении на 180°.
| US 4617731 A1, 21.10.1986 | |||
| Устройство для монтажа кабельных изделий | 1983 |
|
SU1112458A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| DE 3606059 A1, 27.08.1987 | |||
| Устройство для управления реверсивным выпрямителем | 1980 |
|
SU924818A1 |
| DE 4431254 A1, 07.03.1996 | |||
| DE 102012009649 А1, 14.11.2013 | |||
| СПОСОБ ПОЛУЧЕНИЯ НЕКУРИТЕЛЬНОГО ИЗДЕЛИЯ ИЗ МАХОРКИ | 2010 |
|
RU2433760C1 |

