Область техники, к которой относится изобретение
Настоящее изобретение относится к комплексу для места стоянки аэропорта и соответствующему способу. В частности, раскрытие относится к комплексу для места стоянки аэропорта и соответствующему способу с возможностью определения того, находится ли воздушное судно целиком в пределах заранее заданного участка стоянки.
Уровень техники
Комплексы для мест стоянки того типа, что раскрыт в настоящем документе, обычно применяют для контроля воздушных судов на участке стоянки или в его окрестности. Некоторые комплексы для мест стоянки данного типа содержат средства для автоматической постановки воздушных судов на место стоянки и предназначены для этого. Такие комплексы для мест стоянки в некоторых случаях именуются «системы постановки на место стоянки».
Недостаток известных комплексов для мест стоянки состоит в недостаточной точности определения того, действительно ли воздушное судно было безопасно запарковано на месте стоянки. Зачастую известные комплексы для мест стоянки передают персоналу и/или системам аэропорта информацию о том, что воздушное судно безопасно выполнило парковку, тогда как фактически воздушное судно может быть запарковано в месте стоянки небезопасным образом. Небезопасная парковка может повышать риск происшествий на месте стоянки. Например, возможно столкновение других воздушных судов и/или аэродромных транспортных средств, проезжающих или работающих в пределах места стоянки, с небезопасно запаркованным воздушным судном.
Поэтому, несмотря на то, что известные комплексы для мест стоянки способны обеспечить эффективную и безопасную постановку на место стоянки и/или контроль участка стоянки в целом, в данной области техники остается потребность в улучшенном комплексе для места стоянки.
Сущность изобретения
Цель состоит в уменьшении, снижении степени или устранении вышеуказанного недостатка прототипов по отдельности или в комбинации и решении, по меньшей мере, вышеуказанной задачи. Согласно первому аспекту, предложен комплекс для места стоянки аэропорта, содержащий: телеметрическую систему, выполненную с возможностью обнаружения воздушного судна в пределах зоны измерения, причем указанная зона измерения включает в себя участок стоянки на месте стоянки, и
контроллер, выполненный с возможностью:
определения, на основе данных измерения, полученных от указанной телеметрической системы, одного или нескольких оценочных положений наружной поверхности на воздушном судне, причем каждое оценочное положение наружной поверхности представляет собой оценочное положение соответствующего фактического положения наружной поверхности на воздушном судне, причем указанное фактическое положение наружной поверхности образует границу протяженности указанного воздушного судна в зоне измерения,
сопоставления указанных одного или нескольких оценочных положений наружной поверхности с одной или несколькими координатами участка стоянки для определения того, находится ли по меньшей мере одно из указанных одного или нескольких оценочных положений наружной поверхности за пределами указанного участка стоянки, и
если будет определено, что по меньшей мере одно из указанных одного или нескольких оценочных положений наружной поверхности находится за пределами указанного участка стоянки:
выдачи сигнала опасной парковки воздушного судна.
Понятие «телеметрическая система» следует понимать в значении «система обнаружения, выполненная с возможностью дистанционного выявления свойств объекта». В контексте настоящего раскрытия, понятие «телеметрический» («дистанционный», «удаленный» (англ. remote)) не следует понимать, как применимое исключительно к очень большим расстояниям, т.е. как понятие, обычно применяемое в отношении спутниковой телеметрии. В прилагаемой формуле изобретения понятие «телеметрия» следует понимать, как измерение в пределах типового участка стоянки, т.е. участка, обычно расположенного на расстоянии приблизительно 20-50 метров от телеметрической системы, причем измерение осуществляют без фактического соприкосновения с объектом (т.е. дистанционно).
Понятие «данные измерения» следует понимать в значении «данные, полученные из показаний датчика телеметрической системы». Если в зоне измерения присутствует объект, и указанный объект измеряют посредством датчика, данные измерения будут относиться к свойствам этого объекта.
Понятие «зона измерения» следует понимать в значении «геометрическая зона на уровне земли на месте стоянки, где телеметрическая система может точно обнаруживать и измерять объект, например, воздушное судно».
Понятие «положение наружной поверхности» (на воздушном судне) следует понимать в значении «положения вдоль наружной поверхности воздушного судна, указывающие предельную границу воздушного судна в пределах участка стоянки». Таким образом, положения наружной поверхности относятся к двухмерной проекции воздушного судна на плоскость, параллельную участку стоянки (т.е. по существу горизонтальную плоскость). «Оценочные положения наружной поверхности» - это оценочные положения, которые должны отражать истинные или фактические положения наружной поверхности, заданные вдоль наружной поверхности воздушного судна. Оценочное положение наружной поверхности может отличаться от фактического положения наружной поверхности. Из этого следует, что оценочное положение наружной поверхности может быть расположено как в границах воздушного судна, так и на расстоянии от наружной поверхности воздушного судна, в зависимости от того, как оценочное положение отличается от истинного положения.
Понятие «участок стоянки» следует понимать в значении «участок допустимого нахождения воздушного судна в ходе безопасной парковки на месте стоянки». Участок стоянки находится внутри зоны измерения, поэтому телеметрическая система может контролировать участок стоянки целиком. Участок стоянки обычно меньше располагаемой максимальной физической площади на месте стоянки. Максимальная физическая площадь может включать в себя участки, где нахождение воздушного судна недопустимо по соображениям безопасности и/или потому, что там расположено другое оборудование. Участок стоянки задан координатами, т.е. пространственными координатами. В контексте настоящего раскрытия, указанные координаты представляют собой двумерные координаты, определяющие положение участка стоянки относительно окружающих участков, т.е. остальной части располагаемых максимальных физических площадей на месте стоянки, и/или примыкающих к ним более дальних участков, например, рулежной дорожки аэропорта.
Контроллер может быть выполнен с возможностью определения указанных одного или нескольких оценочных положений наружной поверхности на воздушном судне путем выделения положений измеренных частей воздушного судна из указанных данных измерения, назначая указанные выделенные положения в качестве оценочных положений наружной поверхности. Этот подход является прямым: измерительная система по существу измеряет оценочные положения наружной поверхности напрямую на воздушном судне.
В качестве альтернативы или дополнительно, контроллер может быть выполнен с возможностью определения указанных одного или нескольких оценочных положений наружной поверхности на воздушном судне путем выделения положений измеренных участков воздушного судна и оценки указанных одного или нескольких оценочных положений наружной поверхности на воздушном судне путем определения, на основе указанных выделенных положений измеренных участков воздушного судна, протяженности воздушного судна на месте стоянки. Данный подход является косвенным: измерительная система не измеряет оценочные положения наружной поверхности напрямую на воздушном судне. Вместо этого, контроллер выводит их из имеющихся данных измерений. Данный подход будет подробнее раскрыт ниже.
Комплекс для места стоянки аэропорта может обеспечивать преимущества, состоящие в возможности определения геометрических пределов всех частей воздушного судна относительно места стоянки и контроля того, находится ли или нет воздушное судно в пределах допустимого участка места стоянки (т.е. участка стоянки). Комплекс выполнен с возможностью оповещения персонала аэропорта и/или других систем в аэропорту о том, что воздушное судно не запарковано целиком в пределах места стоянки, если будет определено, что одна или несколько частей воздушного судна не находятся в пределах участка стоянки. Данное оповещение является средством предотвращения происшествий в месте стоянки или его окрестности. Одним из примеров таких происшествий является ударение концевым обтекателем крыла рулящего воздушного судна, направляющегося мимо участка стоянки, на котором запарковано другое воздушное судно, хвоста запаркованного воздушного судна. В данном примере столкновение происходит из-за того, что запаркованное на месте стоянки воздушное судно не запарковано безопасным образом. Например, воздушное судно на месте стоянки могло остановиться за несколько метров до планового положения остановки на месте стоянки. В другом примере воздушное судно на месте стоянки может представлять собой воздушное судно типа, отличного от типа воздушного судна, ожидавшегося на месте стоянки. В обоих случаях, хвостовая часть воздушного судна на месте стоянки может выступать за пределы участка стоянки на соседние участки, например, на рулежную дорожку, по которой перемещается проходящее мимо воздушное судно. Кроме того, воздушные суда, запаркованные или маневрирующие на соседних местах стоянки, также могут быть вовлечены в происшествия. Например, если воздушное судно на месте стоянки запарковано слишком близко к соседнему месту стоянки, воздушное судно, маневрирующее для входа на указанное соседнее место стоянки или выхода из него, может столкнуться с запаркованным воздушным судном. Обычно такие происшествия затрагивают концевые обтекатели крыла воздушных судов. Из-за больших размеров воздушных судов и того, что крылья физически проходят в разных направлениях, пилоту рулящего воздушного судна и/или пилоту воздушного судна, маневрирующего на соседнем месте стоянки, трудно, а порой и невозможно, оценить, сможет ли он пройти мимо запаркованного на месте стоянки воздушного судна без столкновения.
Комплекс для места стоянки аэропорта может состоять из нескольких межсоединенных блоков, причем все блоки могут быть размещены в отличных от других положениях у зоны входа или вокруг нее. При этом комплекс для места стоянки аэропорта размещен на месте стоянки и не может обнаруживать воздушные суда в других частях аэропорта, например, на рулежных дорожках (за исключением частей рулежной дорожки в непосредственной близости от участка стоянки) или взлетно-посадочных полосах.
В некоторых вариантах осуществления указанная телеметрическая система включает в себя одну или несколько из следующих систем: радиолокационная система, лазерная система и система формирования изображений.
Телеметрическая система может содержать радиолокационную систему, в основе которой лежит обнаружение сверхвысокочастотного электромагнитного излучения. Такие системы испускают непрерывные или импульсные радиолокационные сигналы в сторону цели, захватывают и обнаруживают радиолокационные импульсы обратного рассеивания от цели. Радиолокационная система может содержать радиолокационный датчик полупроводникового типа. Например, радиолокационный датчик может быть того типа, который применяют в автомобильной промышленности. Радиолокационный датчик может работать на частоте 77 ГГц.
Телеметрическая система может, в качестве альтернативы или дополнительно, содержать лазерную систему, в основе которой лежит обнаружение оптического электромагнитного излучения. Такие системы испускают непрерывное или импульсное лазерное излучение в сторону цели, захватывают и обнаруживают лазерное излучение обратного рассеивания от цели. Лазерная система может содержать средство отклонения пучка для обеспечения возможности сканирования. Например, средство отклонения пучка может представлять собой сканирующее зеркало.
Телеметрическая система может, в качестве альтернативы или дополнительно, содержать камеру, чувствительную к оптическому или инфракрасному излучению. Система формирования изображений выполнена с возможностью улавливания испускаемого целью естественного излучения. При этом также допустимо применение камеры для улавливания излучения, испускаемого целью в результате воздействия лазерной системы. Указанное излучение может представлять собой рассеянное или отраженное лазерное излучение, флуоресцентное излучение, фосфоресцирующее свечение и т.п.
В некоторых вариантах осуществления комплекс для места стоянки аэропорта дополнительно содержит дисплей, причем
комплекс для места стоянки аэропорта также выполнен с возможностью, на основе данных от указанной телеметрической системы, обнаружения и отслеживания воздушного судна на предмет парковки в положении парковки в пределах указанного участка стоянки и с возможностью выдачи, по результатам указанного обнаружения и отслеживания воздушного судна, указаний по маневрированию для пилота на указанном дисплее для содействия пилоту воздушного судна в маневрировании воздушного судна к указанному положению парковки.
Из вышесказанного следует, что комплекс для места стоянки аэропорта может представлять собой систему постановки на место стоянки или, по меньшей мере, содержать функциональные средства постановки воздушного судна на место стоянки.
При этом комплекс для места стоянки может представлять собой отдельный комплекс на месте стоянки. Такой комплекс для места стоянки аэропорта может применять собственную телеметрическую систему, не зависимую от телеметрических систем других систем постановки на место стоянки, которые могут одновременно быть в наличии на месте стоянки. Такой комплекс для места стоянки аэропорта может быть выполнен с возможностью связи с находящейся на месте стоянки системой постановки на место стоянки. В качестве альтернативы или дополнительно, указанные системы постановки на место стоянки могут быть выполнены с возможностью связи непосредственно с какой-либо системой аэропорта, например, базой данных оперативной информации аэропорта (БДОИА).
В некоторых вариантах осуществления контроллер, выполненный с возможностью определения одного или нескольких оценочных положений наружной поверхности на воздушном судне, включает в себя:
контроллер, выполненный с возможностью:
- выявления одного или нескольких характерных элементов воздушного судна,
- определения, для каждого из указанных одного или нескольких характерных элементов, соответствующего положения характерного элемента для задания, на воздушном судне, одного или нескольких положений характерных элементов,
- получения размерных данных воздушного судна, относящихся к указанному воздушному судну или к воздушному судну, ожидаемому к прибытию на место стоянки, и
- вычисления указанных одного или нескольких оценочных положений наружной поверхности на воздушном судне на основе указанных одного или нескольких положений характерных элементов и указанных размерных данных воздушного судна.
Понятие «характерный элемент воздушного судна» следует понимать в значении «физический элемент воздушного судна, который может быть измерен телеметрической системой». Характерными элементами могут быть носовая часть воздушного судна, двигатели воздушного судна и т.п. Каждое соответствующее положение характерного элемента указывает положение, в котором расположен соответствующий характерный элемент. Если характерный элемент имеет большую протяженность по площади или объему, положение характерного элемента может быть указано только одной парой координат, например, центральной части протяженной площади/объема, занимаемого элементом. При этом также возможно применении более одной пары координат для указания характерного элемента.
Понятие «размерные данные воздушного судна» следует понимать в значении «любые данные, включающие в себя размеры воздушных судов». Размерные данные воздушного судна могут относиться к конкретному воздушному судну, конкретному типу и/или модели воздушного судна, либо к множеству воздушных судов и/или типов и/или моделей воздушного судна. Обычно, размерные данные могут представлять собой длину воздушного судна, размах крыла, высоту, площадь крыла, расстояние между двигателями, базу шасси и т.п.
Выявление характерных элементов и применение их положений позволяет определить опорное положение для воздушного судна в зоне измерения. Опорное положение может представлять собой первую порцию информации, необходимой для определения координат, указывающих протяженность воздушного судна в пределах зоны измерения. Вторая порция информации может быть получена из размерных данных воздушного судна. Если известно опорное положение, по размерным данным воздушного судна можно определить дополнительные координаты, совместно указывающие протяженность корпуса воздушного судна в пределах зоны измерения. Правильное положение воздушного судна относительно зоны измерения должно быть определено, оценено или предположено. Данный процесс будет подробнее раскрыт ниже.
Размерные данные воздушного судна могут относиться к воздушному судну, фактически находящемуся на месте стоянки. Тип и/или модель воздушного судна может быть выявлена, например, самим комплексом для места стоянки аэропорта или, в качестве альтернативы, иными системами известным способом. Или же размерные данные воздушного судна могут относиться к воздушному судну, ожидаемому к прибытию на место стоянки. Размерные данные воздушного судна могут быть получены из аэропортовой базы размерных данных. База данных может содержать имеющиеся в аэропорту размерные данные для множества типов и/или моделей воздушных судов. Аэропортовая база размерных данных может входить в состав базы данных оперативной информации аэропорта или, в качестве альтернативы, в состав отдельной базы данных. Аэропортовая база размерных данных может входить в состав базы данных характеристик воздушных судов.
Комплекс для места стоянки аэропорта может определять тип и/или модель воздушного судна путем использования выявленных характерных элементов воздушного судна и их сопоставления с размерными данными воздушного судна. Обычно выявляют более одного характерного элемента. В некоторых вариантах осуществления указанный один или несколько характерных элементов воздушного судна включают в себя два или более характерных элементов воздушного судна, при этом указанные одно или несколько положений характерных элементов включают в себя два или более положений характерных элементов.
В некоторых вариантах осуществления контроллер выполнен с возможностью сопоставления указанных двух или более положений характерных элементов с базой размерных данных воздушного судна, включающей в себя размерные данные для множества типов и/или моделей воздушных судов. Контроллер может быть выполнен с возможностью определения, в случае обнаружения совпадения между указанными двумя или более положениями характерных элементов и размерными данными конкретного воздушного судна из размерных данных воздушного судна в базе данных, указанных одного или нескольких оценочных положений наружной поверхности на воздушном судне на основе указанных двух или более положений характерных элементов и указанных размерных данных конкретного воздушного судна.
В альтернативных вариантах осуществления одно или несколько оценочных положений наружной поверхности на воздушном судне определяют на основе указанных одного или нескольких положений характерных элементов и размерных данных воздушного судна, относящихся к воздушному судну, ожидаемому к прибытию на место стоянки. Контроллер может получать указанные размеры напрямую, например, из другой системы аэропорта, например, из базы данных оперативной информации аэропорта. В качестве альтернативы, контроллер может получать информацию о типе и/или модели воздушного судна воздушного судна, ожидаемого к прибытию на место стоянки, и в этом случае контроллер должен сделать запрос в базе размерных данных воздушного судна, включающей в себя размерные данные для множества типов и/или моделей воздушных судов, для получения из нее указанных размеров.
В некоторых вариантах осуществления конкретный характерный элемент из указанных одного или нескольких характерных элементов воздушного судна представляет собой носовую часть воздушного судна, при этом соответствующее положение характерного элемента указанного конкретного характерного элемента представляет собой положение указанной носовой части воздушного судна.
Выявление носовой части воздушного судна может обеспечивать преимущества. Во-первых, оно обеспечивает возможность более раннего обнаружения при подходе воздушного судна к месту стоянки. Во-вторых, носовую часть выявить проще, чем некоторые другие элементы воздушного судна. Кроме того, носовая часть сама по себе является указателем границы протяженности воздушного судна в зоне измерения.
В некоторых вариантах осуществления одно или несколько оценочных положений наружной поверхности на воздушном судне включают в себя оценочное положение наружной поверхности хвостовой части воздушного судна.
Выбор хвостовой части в качестве цели может быть важным, так как воздушное судно обычно входит на участок стоянки прямо вперед по существу по одной оси с заранее заданной линией заруливания, иногда именуемой «осевая линия». Из-за этого, во многих случаях хвостовая часть воздушного судна наиболее подвержена риску столкновений с другими воздушными судами, например, на рулежной дорожке.
В некоторых вариантах осуществления полученные размерные данные воздушного судна включает в себя длину воздушного судна, при этом контроллер выполнен с возможностью вычисления указанного оценочного положения наружной поверхности на хвостовой части воздушного судна путем прибавления указанной длины воздушного судна к указанному положению носовой части воздушного судна в направлении в сторону от указанного положения носовой части, параллельном оценочному направлению продольной протяженности воздушного судна.
Это обеспечивает относительно надежный и быстрый путь вычисления оценочного положения наружной поверхности на хвостовой части воздушного судна. Продольная протяженность воздушного судна по существу образована продольной протяженностью фюзеляжа воздушного судна (т.е. корпуса фюзеляжа воздушного судна). В данном примере за оценочное направление продольной протяженности воздушного судна может быть принято направление линии заруливания. Данная оценка во многих случаях может быть достаточно точной, так как подход воздушных судов к участку стоянки под углами, значительно отклоняющимися от линии заруливания, с высокой вероятностью будут остановлен уже на ранней стадии подхода по соображениям безопасности.
В качестве альтернативы, продольная протяженность воздушного судна может определять комплекс для места стоянки аэропорта. В некоторых вариантах осуществления оценочное направление продольной протяженности воздушного судна вычисляют на основе по меньшей мере двух из указанных двух или более положений характерных элементов.
Оценочное направление продольной протяженности воздушного судна в данном случае вычисляют, исходя из двух известных положения на воздушном судне. Если два известных положения расположены на воздушном судне симметрично, например, как положения двух двигателей воздушного судна по обе стороны фюзеляжа, то оценочное направление продольной протяженности воздушного судна можно вычислить путем простых геометрических вычислений. Более надежную оценку можно получить, например, путем применения более двух известных положения воздушного судна (например, трех или более положений характерных элементов), и, в качестве альтернативы или дополнительно, применения имеющихся в аэропорту размерных данных для упрощения определения дополнительных геометрических точек измерения воздушного судна.
В некоторых вариантах осуществления контроллер, выполненный с возможностью сопоставления указанных одного или нескольких оценочных положений наружной поверхности с одной или несколькими координатами участка стоянки, включает в себя:
контроллер, выполненный с возможностью сопоставления указанного оценочного положения наружной поверхности хвостовой части воздушного судна с продольной протяженностью указанного участка стоянки.
В данном варианте осуществления предложен быстрый и надежный способ определения того, выступает ли хвостовая часть из участка стоянки. Понятие «продольная протяженность участка стоянки» следует понимать в значении «протяженность участка стоянки по осевой линии».
В некоторых вариантах осуществления по меньшей мере одно оценочное положение наружной поверхности на воздушном судне задано на концевом обтекателе крыла воздушного судна.
Контроль концевых обтекателей крыла может обеспечивать преимущества, например, в случае слишком близкого приближения друг к другу воздушных судов, маневрирующих для захода на соседние места стоянки или выхода с них. Соответствующие комплексы для мест стоянки, расположенные на соседних местах стоянки, могут контролировать положение концевых обтекателей крыла соответствующего воздушного судна и, если будет определено, что положение концевого обтекателя крыла находится за пределами участка стоянки, выдавать сигнал опасной парковки воздушного судна. Указанный сигнал опасной парковки может быть передан на соседнее место стоянки для оповещения персонала на этом месте стоянки о том, что соседнее воздушное судно может находиться слишком близко к месту стоянки.
В некоторых вариантах осуществления контроллер также выполнен с возможностью:
если будет определено, что указанные одно или несколько положений наружной поверхности находятся в пределах указанного участка стоянки:
выдачи сигнала безопасного расстояния до участка стоянки.
Выдача сигнала безопасного расстояния до участка стоянки обеспечивает возможность непрерывного объявления о том, что воздушное судно запарковано безопасно. Передача сигнала безопасного расстояния до участка стоянки может происходить с перерывами, например, с заранее определенной частотой повторения.
Контроллер может быть выполнен с возможностью передачи указанного сигнала безопасного расстояния до участка стоянки одному или нескольким из следующих:
соседние воздушные суда в окрестности зоны измерения,
база данных оперативной информации аэропорта,
авиадиспетчерская служба, и
приемные устройства, носимые персоналом места стоянки.
Соседние воздушные суда могут представлять собой воздушные суда находящиеся на соседних местах стоянки или заходящие на них / покидающие их. Или же соседние воздушные суда могут представлять собой воздушные суда, просто проходящие в окрестности места стоянки, например, рулящие воздушные суда, проходящие мимо места стоянки по соседней рулежной дорожке.
В некоторых вариантах осуществления то, что контроллер выполнен с возможностью выдачи сигнала опасной парковки воздушного судна, включает в себя то, что:
контроллер выполнен с возможностью передачи указанного сигнала опасной парковки воздушного судна одному или нескольким из следующих:
соседние воздушные суда в окрестности зоны измерения,
база данных оперативной информации аэропорта,
служба управления наземным движением, и
приемные устройств, носимые персоналом места стоянки.
В качестве альтернативы или дополнительно, в вариантах осуществления комплекса для места стоянки, содержащих функциональные средства постановки воздушного судна на место стоянки, например, системы постановки на место стоянки, контроллер может также быть выполнен с возможностью выдачи сигнала опасной парковки воздушного судна на дисплей для информирования пилота воздушного судна о том, что воздушное судно не запарковано безопасно в положении парковки. Это можно осуществлять с перерывами, например, с заранее определенной частотой повторения, или, в качестве альтернативы, когда пилот укажет, что он запарковал воздушное судно в положении остановки.
Согласно второму аспекту, предложен способ, реализуемый в комплексе для места стоянки аэропорта, причем указанный комплекс для места стоянки содержит телеметрическую систему, выполненную с возможностью обнаружения воздушного судна в пределах зоны измерения, причем указанная зона измерения включает в себя указанный участок стоянки на месте стоянки, при этом указанный способ включает в себя этапы, на которых:
получают от телеметрической системы данные измерения, относящиеся к воздушному судну, обнаруженному в пределах зоны измерения,
определяют, на основе указанных полученных данных измерения, одно или несколько оценочных положений наружной поверхности на воздушном судне, причем каждое оценочное положение наружной поверхности представляет собой оценочное положение соответствующего фактического положения наружной поверхности на воздушном судне, причем указанное фактическое положение наружной поверхности образует границу протяженности указанного воздушного судна в зоне измерения,
сопоставляют указанное одно или несколько оценочных положений наружной поверхности с одной или несколькими координатами участка стоянки для определения того, находится ли по меньшей мере одно из указанных одного или нескольких оценочных положений наружной поверхности за пределами указанного участка стоянки, и
если будет определено, что по меньшей мере одно из указанных одного или нескольких оценочных положений наружной поверхности находится за пределами указанного участка стоянки:
выдают сигнал опасной парковки воздушного судна.
В некоторых вариантах осуществления на этапе, на котором определяют одно или несколько оценочных положений наружной поверхности на воздушном судне:
выявляют один или нескольких характерных элементов воздушного судна,
определяют, для каждого из указанных одного или нескольких характерных элементов, соответствующее положение характерного элемента для задания, на воздушном судне, одного или нескольких положений характерных элементов,
получают размерные данные воздушного судна, относящиеся к указанному воздушному судну, или
к воздушному судну, ожидаемому к прибытию на место стоянки, и
вычисляют указанное одно или несколько оценочных положений наружной поверхности на воздушном судне на основе указанных одного или нескольких положений характерных элементов и указанных размерных данных воздушного судна.
В некоторых вариантах осуществления конкретный характерный элемент из указанных одного или нескольких характерных элементов воздушного судна представляет собой носовую часть воздушного судна,
соответствующее положение характерного элемента указанного конкретного характерного элемента представляет собой положение указанной носовой части воздушного судна,
указанное одно или несколько оценочных положений наружной поверхности на воздушном судне включают в себя оценочное положение наружной поверхности хвостовой части воздушного судна,
указанные полученные размерные данные воздушного судна включают в себя длину воздушного судна,
и
на этапе, на котором вычисляют указанное одно или несколько оценочных положений наружной поверхности на воздушном судне:
вычисляют указанное оценочное положение наружной поверхности на хвостовой части воздушного судна путем прибавления указанной длины воздушного судна к указанному положению носовой части воздушного судна в направлении, параллельном продольной протяженности воздушного судна.
Эффекты и признаки второго и третьего аспектов в основном аналогичны тем, что были раскрыты выше для первого аспекта. Варианты осуществления, раскрытые для первого аспекта, в основном применимы ко второму и третьему аспектам. Также следует отметить, что идеи изобретения относятся ко всем возможным комбинациям признаков, если явным образом не указано иное.
Согласно третьему аспекту, предложен машиночитаемый носитель данных, содержащий инструкции компьютерного кода, выполненные с возможностью, при исполнении их устройством с функциями обработки, выполнения способа по второму аспекту.
Другие области применения настоящего изобретения станут понятны из нижеследующего раздела «Осуществление изобретения». При этом следует понимать, что предпочтительные варианты осуществления, приведенные в разделе «Осуществление изобретения» и в частных примерах, носят исключительно иллюстративный характер, так как после ознакомления с разделом «Осуществление изобретения» специалистам в данной области техники придут на ум разнообразные изменения и модификации без отступления от объема изобретения.
Таким образом, следует понимать, что настоящее изобретение не ограничено частными составляющими частями раскрытого устройства или раскрытыми этапами способов, в связи с чем в устройство и способ могут быть внесены изменения. Также следует понимать, что используемая в настоящем документе терминология служит исключительно для раскрытия частных вариантов осуществления и не носит ограничивающего характера. Следует отметить, что неопределенные и определенные артикли (англ. «а», «an», «the») и определение «указанный» следует понимать как означающие наличие одного или нескольких элементов, если иное явно не следует из контекста. Например, «блок» с неопределенным или определенным артиклем (англ. «а unit» или «the unit») может включать в себя несколько устройств и т.п. Кроме того, слова «содержащий», «включающий в себя», «вмещающий» и аналогичные выражения не исключают наличия других элементов или этапов.
Краткое описание чертежей
Изобретение будет подробнее раскрыто на примерах прилагаемых схематических чертежей, изображающих предпочтительные на данный момент варианты осуществления изобретения.
Фиг. 1А и 1В изображают вид сверху места стоянки аэропорта (в аэропорту), соседнюю рулежную дорожку и два воздушных судна.
Фиг. 2 изображает вид сверху комплекса для места стоянки аэропорта по одному из вариантов осуществления настоящего раскрытия.
Фиг. 3 изображает вид сверху комплекса для места стоянки аэропорта по другому варианту осуществления настоящего раскрытия.
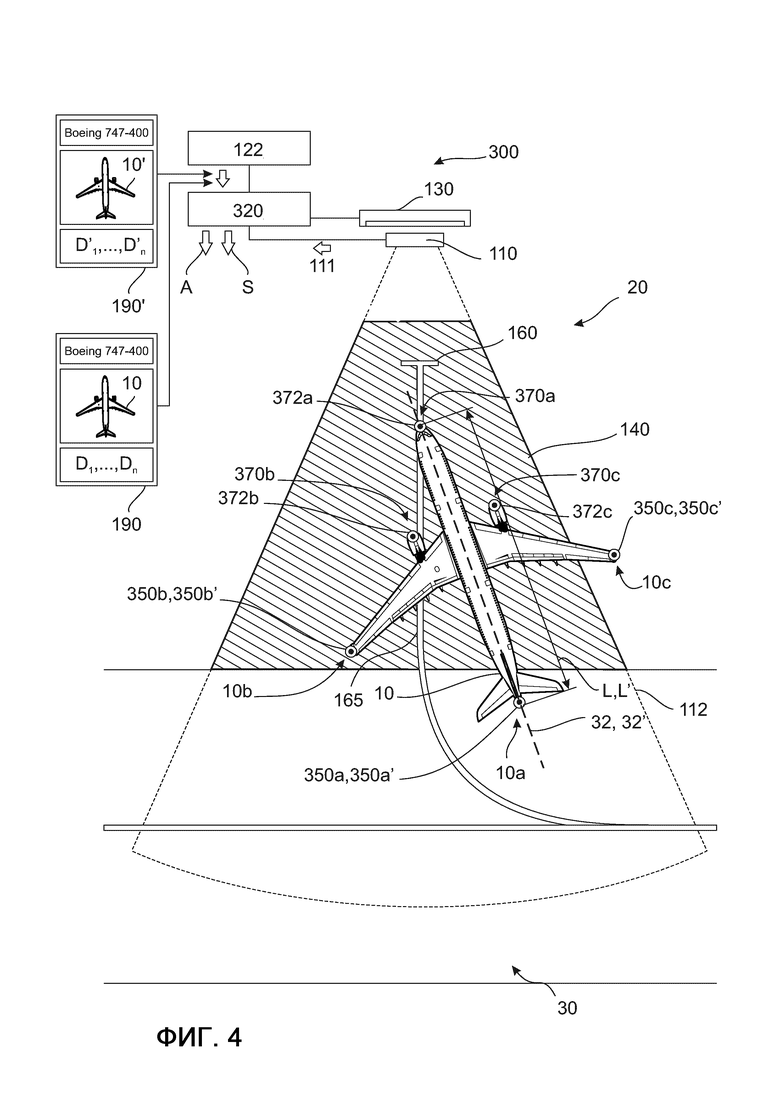
Фиг. 4 изображает вид сверху комплекса для места стоянки аэропорта по еще одному варианту осуществления настоящего раскрытия.
Осуществление изобретения
Настоящее изобретение будет подробнее раскрыто ниже на примерах прилагаемых чертежей, изображающих предпочтительные на данный момент варианты осуществления изобретения. При этом следует понимать, что изобретение может быть осуществлено во многих других формах и не ограничено изложенными в настоящем документе вариантами осуществления; данные варианты осуществления приведены для целей подробного и полного раскрытия, а также доведения полного объема изобретения до сведения специалиста в данной области техники.
Фиг. 1А и В изображают ситуацию, могущую возникнуть и иногда возникающую в аэропорту. На Фиг. 1А показано, что воздушное судно 10 совершило парковку на месте 20 стоянки. При этом, по какой-то причине, пилот полностью не дошел до положения 160 остановки. В результате, части воздушного судна выступают из места стоянки на соседнюю рулежную дорожку 30. При этом, поскольку диспетчерская служба аэропорта получила информацию об успешной парковке воздушного судна 10 на месте 20 стоянки, другому воздушному судну 80 было выдано разрешение на прохождение мимо места 20 стоянки по рулежной дорожке 30. Пилот воздушного судна 80 не знает о том, что хвостовая часть воздушного судна 10 выступает, и не может видеть данную проблему со своего места в кабине экипажа. Кроме того, он получил разрешение на прохождение. На Фиг. 1В показано, что это приводит к столкновению, а именно - столкновению правого крыла воздушного судна 80 с рулем направления воздушного судна 10, могущему привести к возникновению серьезных рисков для пассажиров и наземного персонала, а также обширным физическим повреждениям участвующих в нем воздушных судов.
Раскрытый в настоящем документе комплекс для места стоянки аэропорта позволяет избежать возникновения вышеуказанных ситуаций.
Фиг. 2 иллюстрирует первый пример осуществления: комплекс 100 для места стоянки аэропорта. Комплекс 100 для места стоянки аэропорта содержит телеметрическую систему 110, выполненную с возможностью обнаружения воздушного судна 10 в пределах зоны 112 измерения, причем указанная зона 112 измерения включает в себя участок 140 стоянки на месте 20 стоянки. Зона 112 измерения охватывает, по меньшей мере, части места 20 стоянки и, в данном случае, также части соседней рулежной дорожки 20. Телеметрическая система 110 включает в себя одну или несколько из следующих систем: радиолокационная система, лазерная система и система формирования изображений. Телеметрическая система может, например, включать в себя лазерную телеметрическую систему, выполненную с возможностью сканирования зоны 112 измерения.
Комплекс 100 для места стоянки аэропорта дополнительно содержит дисплей 130, при этом комплекс 100 также выполнен с возможностью обнаружения и отслеживания, на основе данных от указанной телеметрической системы 110, воздушного судна 10 на предмет парковки в положении 160 парковки в пределах указанного участка 140 стоянки. Комплекс 100 для места стоянки аэропорта также выполнен с возможностью выдачи, по результатам обнаружения и отслеживания воздушного судна 10, указаний по маневрированию для пилота на указанном дисплее 130 для содействия пилоту воздушного судна 10 в маневрировании воздушного судна к указанному положению 160 парковки. Таким образом, комплекс 100 для места стоянки аэропорта имеет функции автоматической системы постановки на место стоянки.
Комплекс 100 для места стоянки аэропорта дополнительно содержит контроллер 120, выполненный с возможностью определения, на основе данных 111 измерения, полученных от указанной телеметрической системы 110, одного или нескольких оценочных положений наружной поверхности (в данном примере: одного оценочного положения 150а' наружной поверхности) на воздушном судне 10, причем каждое оценочное положение наружной поверхности представляет собой оценочное положение соответствующего фактического положения наружной поверхности на воздушном судне 10 (в данном примере: соответствующего фактического положения 150а наружной поверхности). На Фиг. 2 показано, что для данного примера осуществления оценочное положение 150а' наружной поверхности задано на хвостовой части 10а воздушного судна 10. Фактическое положение 150а наружной поверхности образует границу протяженности указанного воздушного судна в зоне 112 измерения. Оценочное положение 150а' наружной поверхности может быть отлично от фактического положения 150а наружной поверхности (см. Фиг. 2).
Контроллер 120 также выполнен с возможностью сопоставления указанных одного или нескольких оценочных положений 150а' наружной поверхности с одной или несколькими координатами участка 140 стоянки для определения того, находится ли по меньшей мере одно из указанных одного или нескольких оценочных положений 150а' наружной поверхности за пределами указанного участка 140 стоянки.
И наконец, контроллер 120 выполнен с возможностью выдачи сигнала А опасной парковки воздушного судна, если будет определено, что по меньшей мере одно из указанных одного или нескольких оценочных положений 150а' наружной поверхности находится за пределами указанного участка 140 стоянки. Раскрытый выше пример осуществления содержит только одно оценочное положение наружной поверхности, а именно - оценочное положение 150а' хвостовой части 10а.
Сигнал А опасной парковки воздушного судна можно применять разными путями. В данном примере осуществления контроллер 120 выполнен с возможностью передачи, посредством передатчика (не показан), сигнала А опасной парковки воздушного судна соседним воздушным судам в окрестности зоны 112 измерения, в базу данных оперативной информации аэропорта, авиадиспетчерской службе и приемным устройствам, носимым персоналом места стоянки. Специалисту в данной области техники будет понятно, что передача тревожного сигнала А позволяет принять множество мер по снижению риска столкновений. Она также позволяет повысить эффективность наземного движения в аэропорту.
Контроллер 120 также выполнен с возможностью выдачи сигнала S безопасного расстояния до участка стоянки, если будет определено, что указанное одно или несколько оценочных положений 150а' наружной поверхности находятся в пределах указанного участка 140 стоянки. Контроллер 120 может быть выполнен с возможностью передачи указанного сигнала S безопасного расстояния до участка стоянки одному или нескольким из следующих: соседние воздушные суда в окрестности зоны измерения, база данных оперативной информации аэропорта, авиадиспетчерская служба и приемные устройства, носимые персоналом места стоянки.
Существует множество альтернативных путей определения одного или нескольких оценочных положений наружной поверхности на воздушном судне. Один из них раскрыт ниже применительно к комплексу 100 для места стоянки аэропорта:
Сначала контроллер 120 может выявить один или несколько характерных элементов 170а-с воздушного судна 10. Контроллер получает данные 111 измерения от телеметрической системы 110 и анализирует указанные данные 111 измерения. Контроллер 120 выполнен с возможностью, в случае обнаружения объекта, поиска данных 111 измерения, например, с помощью алгоритмов распознавания образов, для выявления характерных элементов воздушного судна. Характерные элементы определены заранее и соотнесены с конкретным характерным образом в данных 111 измерения. Одним из таких характерных элементов является носовая часть 170а воздушного судна 10. Примерами других характерных элементов являются двигатели 170b, 170с воздушного судна, форма передней части крыльев и т.п.
Далее контроллер 120 может определить, для каждого из указанных одного или нескольких характерных элементов, соответствующее положение характерного элемента для задания на воздушном судне 10 одного или нескольких положений 172а-с характерного элемента. Таким образом, способ позволяет определять пространственные координаты, относящиеся к конкретным элементам воздушного судна.
Затем контроллер 120 может получить размерные данные 190 воздушного судна, относящиеся к указанному воздушному судну 10 или к воздушному судну 10', ожидаемому к прибытию на место 20 стоянки. Размерные данные 190 и 190' воздушного судна являются альтернативами друг другу и будут подробнее раскрыты ниже. Далее контроллер 120 может вычислить указанное одно или несколько оценочных положений наружной поверхности (в данном примере: оценочное положение 150а' хвостовой части) на воздушном судне 10 на основе указанных одного или нескольких положений 172а-с характерных элементов и указанных размерных данных 190, 190' воздушного судна. В данном примере осуществления размерные данные 190' воздушного судна включают в себя длину L' воздушного судна 10', ожидаемого к прибытию на место 20 стоянки, а размерные данные 190 воздушного судна включают в себя длину L воздушного судна 10 в месте 20 стоянки. Важно провести различие между двумя воздушными судами 10 и 10', речь о которых идет в настоящем разделе. В частности, длину можно определять либо путем оценки длины L на основе полученных данных измерения непосредственно воздушного судна 10, находящегося в зоне 112 измерения, либо из информации о длине L' ожидаемого воздушного судна 10', переданной контроллеру 110 из какого-либо другого источника. В первом альтернативном варианте воздушное судно 10, находящееся в зоне 112 измерения, измеряют посредством телеметрической системы 110. Далее, из данных 111 измерения, полученных от указанной измерительной системы 110, можно вывести длину L либо напрямую (например, путем анализа характерного элемента хвостовой части 10а воздушного судна 10), либо косвенно. Так как телеметрические системы могут менее точно обнаруживать характерные элементы в хвостовой части 10а, косвенный способ может обеспечивать преимущество. Комплекс 100 для места стоянки аэропорта может быть выполнен с возможностью определения двух или более характерных элементов 170а-с воздушного судна и соответствующих двух или более положений 172а-с характерных элементов. Один известный подход состоит в определении положения 172а носовой части 170а и положений 172b, 172с двигателей 170b, 170с на крыльях воздушного судна. Контроллер 120 может быть выполнен с возможностью сопоставления указанных двух или более положений 172а-с характерных элементов с базой 122 размерных данных воздушного судна, включающей в себя размерные данные для множества типов и/или моделей воздушных судов, и, в случае обнаружения совпадения между указанными двумя или более положениями 172а-с характерных элементов и размерными данными 190 конкретного воздушного судна из размерных данных воздушного судна в базе данных, извлечения, из этих размерных данных конкретного воздушного судна, длины L воздушного судна.
Теперь комплекс 100 для места стоянки аэропорта имеет доступ к по меньшей мере одному опорному положению характерного элемента воздушного судна, например, к положению характерного элемента 172а носовой части 170а воздушного судна 10. Комплекс 100 также имеет доступ к оценочной L или предполагаемой L' длине воздушного судна 10. Контроллер 120 выполнен с возможностью определения оценочного направления 12' продольной протяженности воздушного судна 10 в качестве третьей порции информации. Для комплекса 100 для места стоянки, проиллюстрированного на Фиг. 2, направление оценивают, исходя из предполагаемого углового положения воздушного судна относительно места 20 стоянки. При маневрировании воздушного судна пилотом или буксировщиками для направления его по заранее определенной траектории, этот, казалось бы, приближенный подход может на практике быть достаточен для комплекса для места стоянки. На участке 20 стоянки, воздушное судно 10, по меньшей мере, когда оно находится в окрестности положения 160 остановки, относительно правильно расположено относительно осевой линии 165. Это позволяет предположить, что оценочное направление 12' продольной протяженности воздушного судна 10 параллельно осевой линии 165. Далее контроллер 110 может вычислить оценочное положение 150а' наружной поверхности на хвостовой части 10а воздушного судна 10 путем прибавления (извлеченной из базы данных) длины L воздушного судна к указанному положению 172 носовой части 170а воздушного судна в направлении в сторону от указанного положения 172а носовой части 170а, параллельном оценочному направлению 12' продольной протяженности воздушного судна 10. Угловое положение воздушного судна относительно места 20 стоянки в относительно грубом приближении проиллюстрировано на Фиг. 2, из которой видно, что оценочное положение 150а' наружной поверхности на хвостовой части 10а воздушного судна 10 смещено на некоторое расстояние влево от своего фактического аналога - фактического положения 150а наружной поверхности. Один из путей учета возможной погрешности оценки состоит в прибавлении безопасного расстояния Т к значению оценочного положения. Оно также проиллюстрировано на Фиг. 2, где оценочное положение 150а' хвостовой части 10а заканчивается на некотором расстоянии от фактического положения 150а хвостовой части 10а.
Фиг. 3 иллюстрирует комплекс 200 для места стоянки аэропорта по альтернативному варианту осуществления. Комплекс 200 для места стоянки аэропорта имеет общие структурные признаки с комплексом 100 для места стоянки аэропорта, но отлично от него в том, что в данном случае контроллер 220 выполнен с возможностью выявления двух или более характерных элементов 270а-с воздушного судна и соответствующих двух или более положений 272а-с характерных элементов, а также вычисления оценочного направления 22' продольной протяженности воздушного судна на основе по меньшей мере двух из указанных двух или более положений 272а-с характерных элементов. Таким образом, вместо применения предполагаемого углового положения воздушного судна относительно места 20 стоянки, продольную протяженность воздушного судна 10 определяют посредством комплекса 200 для места стоянки аэропорта. Оценочное направление 22' продольной протяженности воздушного судна 10 может быть вычислено путем сопоставления двух или более положений 272а-с характерных элементов воздушного судна с координатами участка 140 стоянки или координатами осевой линии 165. Длину воздушного судна можно определять либо для воздушного судна 10 в месте 20 стоянки (длина L), либо для воздушного судна 10', ожидаемого к прибытию на место 20 стоянки (длина L'). Далее контроллер 220 может вычислить оценочное положение 250а' наружной поверхности на хвостовой части 10а воздушного судна 10 путем прибавления длины L, L' к положению 272а носовой части 270а воздушного судна в направлении в сторону от положения 272а носовой части 270а, параллельном оценочному направлению 22' продольной протяженности воздушного судна. На Фиг. 3 показано, что это позволяет повысить точность оценки положения 250а' хвостовой части 10а.
Выше речь шла о хвостовой части воздушного судна. При этом и другие части воздушных судов могут быть затронуты при происшествиях, если они выступают из участка 120 стоянки и об этом не известно.
Фиг. 4 иллюстрирует такую ситуацию, а также комплекс 300 для места стоянки аэропорта по другому примеру осуществления. Комплекс 300 для места стоянки аэропорта имеет общие структурные признаки с комплексами 100 и 200 для места стоянки аэропорта, но отлично от них в том, что в данном случае контроллер 320 выполнен с возможностью определения произвольных оценочных положений наружной поверхности вдоль границы воздушного судна 10.
Во-первых, следует отметить, что в данном случае воздушное судно 10 стоит на участке 140 стоянки так, что и его хвостовая часть 10b, и правое крыло 10 с выступают из участка. Комплексы 100 и 200 для мест стоянки могут оценить положение хвостовой части 10а, однако указанные комплексы 100,200 могут не быть способны обнаружить положение левого крыла 10с.
Контроллер 320 комплекса 300 для места стоянки аэропорта может, после того, как он выявит характерные элементы 370а-с и определит их соответствующие положения 372а-с, сопоставить указанные два или более положений 372а-с характерных элементов с базой 122 размерных данных воздушного судна, включающей в себя размерные данные для множества типов и/или моделей воздушных судов, и, в случае обнаружения совпадения между указанными двумя или более положениями 372а-с характерных элементов и размерными данными 190,190' конкретного воздушного судна из размерных данных воздушного судна в базе данных 122, определить указанное одно или несколько оценочных положений 350а'-с' наружной поверхности на воздушном судне 10 на основе указанных двух или более положений 372а-с характерных элементов и указанных размерных данных 190,190' конкретного воздушного судна.
Таким образом, в случае комплекса 300 для места стоянки аэропорта, два или более опорных положений воздушного судна (т.е. положения 372а-с характерных элементов) применяют не только для определения или простого извлечения из базы данных длины воздушного судна, но, в качестве альтернативы или дополнительно, для выведения других размеров, относящихся к указанному воздушному судну 10. В число неограничивающих примеров таких размеров входят: длина воздушного судна, размах крыла, высота, площадь крыла, расстояние между двигателями, база шасси и т.п. При наличии достаточных вводных данных из базы 122 размерных данных воздушного судна, контроллер 320 может определять любое положение вдоль границы воздушного судна, в том числе - положения частей 10b, 10с концевых обтекателей крыла.
Специалисту в данной области техники будет понятно, что настоящее изобретение ни в коей мере не ограничено раскрытыми выше предпочтительными вариантами осуществления. Напротив, возможны многочисленные модификации и изменения без отступления от объема прилагаемой формулы изобретения. При реализации заявляемого изобретения на практике, специалист в данной области техники, ознакомившись с чертежами, раскрытием и прилагаемой формулой изобретения, сможет понять и реализовать разновидности раскрытых вариантов осуществления.



Изобретение относится к комплексу для постановки воздушного судна на место стоянки в аэропорту и соответствующему способу. Комплекс содержит телеметрическую систему, выполненную с возможностью обнаружения воздушного судна в пределах зоны измерения, причем указанная зона измерения включает в себя участок стоянки и контроллер, выполненный с возможностью определения на основе данных измерения, полученных от телеметрической системы, оценочных положений наружной поверхности на воздушном судне. Оценочное положение наружной поверхности представляет собой оценочное положение фактического положения наружной поверхности на воздушном судне. Фактическое положение наружной поверхности образует границу протяженности воздушного судна в зоне измерения. Контроллер выполнен с возможностью сопоставления оценочных положений наружной поверхности с координатами участка стоянки для определения того, находится ли оценочное положение наружной поверхности за пределами участка стоянки, выдачи сигнала опасной парковки воздушного судна. Обеспечивается эффективная и безопасная постановка воздушного судна на место стоянки. 3 н. и 9 з.п. ф-лы, 5 ил.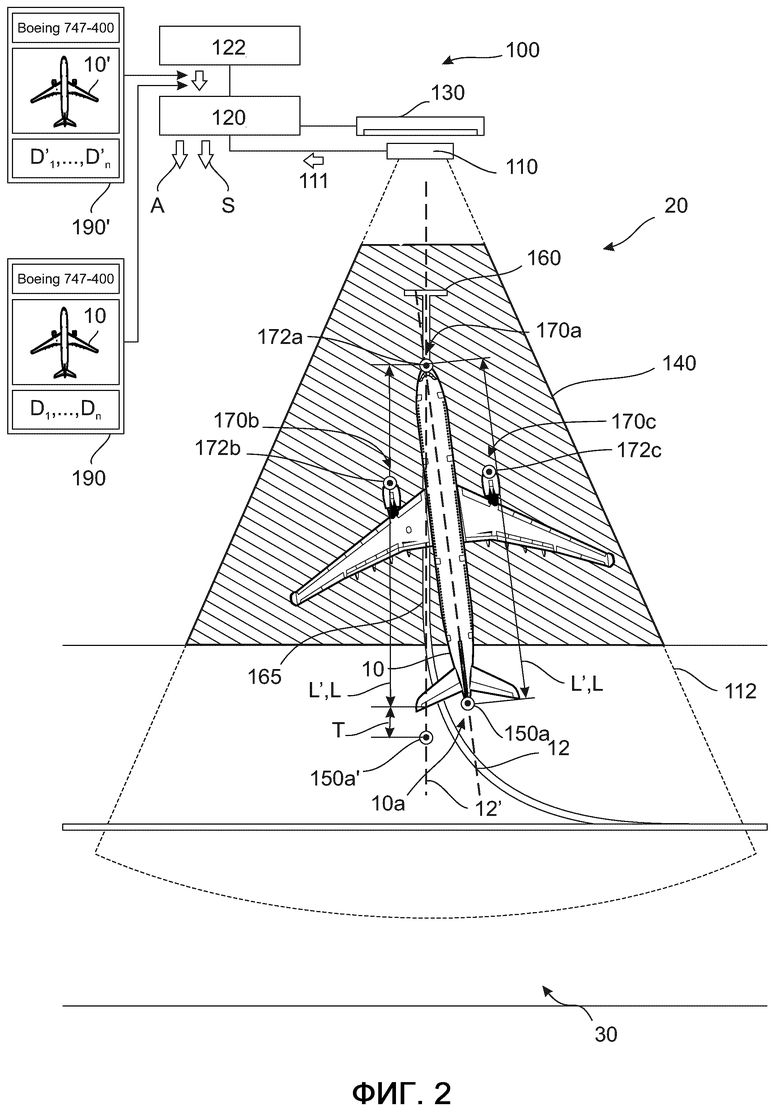
1. Комплекс для постановки воздушного судна на место стоянки в аэропорту, содержащий:
телеметрическую систему, выполненную с возможностью обнаружения воздушного судна в пределах зоны измерения, причем указанная зона измерения включает в себя участок стоянки на месте стоянки, и
контроллер, выполненный с возможностью:
определения, на основе данных измерения, полученных от указанной телеметрической системы, одного или нескольких оценочных положений наружной поверхности на воздушном судне, причем каждое оценочное положение наружной поверхности представляет собой оценочное положение соответствующего фактического положения наружной поверхности на воздушном судне, причем указанное фактическое положение наружной поверхности образует границу протяженности указанного воздушного судна в зоне измерения, причем то, что контроллер выполнен с возможностью определения указанных одного или нескольких оценочных положений наружной поверхности воздушного судна, включает в себя, что контроллер выполнен с возможностью:
- выявления одного или нескольких характерных элементов воздушного судна, причем конкретный характерный элемент из указанных одного или нескольких характерных элементов воздушного судна представляет собой носовую часть воздушного судна,
- определения, для каждого из указанных одного или нескольких характерных элементов, соответствующего положения характерного элемента для задания, на воздушном судне, одного или нескольких положений характерных элементов, причем соответствующее положение характерного элемента указанного конкретного характерного элемента представляет собой положение указанной носовой части воздушного судна,
- получения размерных данных воздушного судна, относящихся к воздушному судну, и
- вычисления указанных одного или нескольких оценочных положений наружной поверхности на воздушном судне на основе указанных одного или нескольких положений характерного элемента и указанных размерных данных воздушного судна, причем указанные одно или несколько оценочных положений наружной поверхности на воздушном судне включают в себя оценочное положение наружной поверхности хвостовой части воздушного судна,
причем контроллер дополнительно выполнен с возможностью:
сопоставления указанных одного или нескольких оценочных положений наружной поверхности с одной или несколькими координатами участка стоянки для определения того, находится ли по меньшей мере одно из указанных одного или нескольких оценочных положений наружной поверхности за пределами указанного участка стоянки, и
если будет определено, что по меньшей мере одно из указанных одного или нескольких оценочных положений наружной поверхности находится за пределами указанного участка стоянки:
выдачи сигнала опасной парковки воздушного судна.
2. Комплекс по п. 1, в котором указанная телеметрическая система включает в себя одну или несколько из следующих систем: радиолокационная система, лазерная система и система формирования изображений.
3. Комплекс по п. 1, дополнительно содержащий дисплей, и
причем комплекс для места стоянки аэропорта дополнительно выполнен с возможностью, на основе данных от указанной телеметрической системы, обнаружения и отслеживания воздушного судна на предмет парковки в положении парковки в пределах указанного участка стоянки и с возможностью, по результатам указанного обнаружения и отслеживания воздушного судна, выдачи указаний по маневрированию для пилота на указанном дисплее для содействия пилоту воздушного судна в маневрировании воздушного судна к указанному положению парковки.
4. Комплекс по п. 1, в котором указанные полученные размерные данные воздушного судна включают в себя длину воздушного судна,
причем контроллер выполнен с возможностью вычисления указанного оценочного положения наружной поверхности на хвостовой части воздушного судна путем прибавления указанной длины воздушного судна к указанному положению носовой части воздушного судна в направлении в сторону от указанного положения носовой части, параллельном оценочному направлению продольной протяженности воздушного судна.
5. Комплекс по п. 1, в котором указанные один или нескольких характерных элементов воздушного судна включают в себя два или более характерных элементов воздушного судна,
причем указанные одно или несколько положений характерных элементов включают в себя два или более положений характерных элементов.
6. Комплекс по п. 5, в котором указанное оценочное направление продольной протяженности воздушного судна вычислено на основе по меньшей мере двух из указанных двух или более положений характерных элементов.
7. Комплекс по п. 5, в котором то, что контроллер выполнен с возможностью определения одного или нескольких оценочных положений наружной поверхности на воздушном судне, включает в себя:
контроллер выполнен с возможностью:
сопоставления указанных двух или более положений характерных элементов с базой размерных данных воздушного судна, включающей в себя размерные данные для множества типов и/или моделей воздушных судов, и
в случае обнаружения совпадения между указанными двумя или более положениями характерных элементов и размерными данными конкретного воздушного судна из размерных данных воздушного судна в базе данных:
определения указанных одного или нескольких оценочных положений наружной поверхности на воздушном судне на основе указанных двух или более положений характерных элементов и указанных размерных данных конкретного воздушного судна.
8. Комплекс по п. 1, в котором контроллер также выполнен с возможностью:
если определено, что указанные одно или несколько оценочных положений наружной поверхности находятся в пределах указанного участка стоянки:
выдачи сигнала безопасного расстояния до участка стоянки.
9. Комплекс по п. 1, в котором то, что контроллер выполнен с возможностью выдачи сигнала опасной парковки воздушного судна, включает в себя то, что:
контроллер выполнен с возможностью передачи указанного сигнала опасной парковки воздушного судна одному или нескольким из следующих:
соседние воздушные суда в окрестности зоны измерения,
база данных оперативной информации аэропорта,
служба управления наземным движением, и
приемные устройства, носимые персоналом места стоянки.
10. Способ постановки воздушного судна на место стоянки в аэропорту, реализуемый в комплексе для места стоянки аэропорта, причем указанный комплекс для места стоянки включает в себя телеметрическую систему, выполненную с возможностью обнаружения воздушного судна в пределах зоны измерения, причем указанная зона измерения включает в себя указанный участок стоянки на месте стоянки, при этом указанный способ включает в себя этапы, на которых:
получают от телеметрической системы данные измерения, относящиеся к воздушному судну, обнаруженному в пределах зоны измерения,
определяют, на основе указанных полученных данных измерения, одно или несколько оценочных положений наружной поверхности на воздушном судне, причем каждое оценочное положение наружной поверхности представляет собой оценочное положение соответствующего фактического положения наружной поверхности на воздушном судне, причем указанное фактическое положение наружной поверхности образует границу протяженности указанного воздушного судна в зоне измерения, причем на этапе, на котором определяют одно или несколько оценочных положений наружной поверхности на воздушном судне:
выявляют один или несколько характерных элементов воздушного судна, причем конкретный характерный элемент из указанных одного или нескольких характерных элементов воздушного судна представляет собой носовую часть воздушного судна,
определяют, для каждого из указанных одного или нескольких характерных элементов, соответствующее положение характерного элемента для задания, на воздушном судне, одного или нескольких положений характерных элементов, причем соответствующее положение характерного элемента указанного конкретного характерного элемента представляет собой положение указанной носовой части воздушного судна,
получают размерные данные воздушного судна, относящиеся к воздушному судну, и
вычисляют указанное одно или несколько оценочных положений наружной поверхности на воздушном судне на основе указанных одного или нескольких положений характерного элемента и указанных размерных данных воздушного судна, причем указанное одно или несколько оценочных положений наружной поверхности на воздушном судне включают в себя оценочное положение наружной поверхности хвостовой части воздушного судна,
сопоставляют указанное одно или несколько оценочных положений наружной поверхности с одной или несколькими координатами участка стоянки для определения того, находится ли по меньшей мере одно из указанных одного или нескольких оценочных положений наружной поверхности за пределами указанного участка стоянки, и
если будет определено, что по меньшей мере одно из указанных одного или нескольких оценочных положений наружной поверхности находится за пределами указанного участка стоянки:
выдают сигнал опасной парковки воздушного судна.
11. Способ по п. 10,
в котором указанные полученные размерные данные воздушного судна включают в себя длину воздушного судна,
причем на этапе, на котором вычисляют указанное одно или несколько оценочных положений наружной поверхности на воздушном судне:
вычисляют указанное оценочное положение наружной поверхности на хвостовой части воздушного судна путем прибавления указанной длины воздушного судна к указанному положению носовой части воздушного судна в направлении в сторону от указанного положения носовой части, параллельном оценочному направлению продольной протяженности воздушного судна.
12. Долговременный машиночитаемый носитель данных, содержащий инструкции компьютерного кода, выполненные с возможностью, при исполнении их устройством с функциями обработки, выполнения способа по п. 10.
| US 20030060998 A1, 27.03.2003 | |||
| US 20170263139 А1, 14.09.2017 | |||
| US 20130289867 А1, 31.10.2013 | |||
| US 20190106223 А1, 11.04.2019 | |||
| RU 2158963 C1, 10.11.2000. |

