Область техники, к которой относится изобретение
Данное изобретение, в целом, относится к способу и системе для идентификации воздушных судов, и, в частности, к способу и системе для идентификации воздушного судна в связи с приближением к месту стоянки.
Обзор известных технических решений
В аэропорту каждое воздушное судно, прибывающее в аэропорт, снабжается графиком, описывающим, например, в какое место стоянки, то есть зону парковки для воздушного судна, оно должно прибыть и в какое время. Рабочая база данных аэропорта (Airport Operational Database, AODB) содержит информацию о прибывающем (и вылетающем) воздушном судне и, в частности, о типе и/или модели, назначенном месте стоянки и ожидаемом времени прибытия каждого прибывающего воздушного судна. База AODB связана с системой отображения полетной информации (Flight Information Display System, FIDS), в которой компьютерная система управляет механическими или электронными информационными табло или телеэкранами, чтобы отображать прилеты или вылеты и, необязательно, другую информацию о рейсах.
Информация в базе AODB и/или системе FIDS иногда может быть несоответствующей, это означает, что воздушное судно может быть направлено к месту стоянки, которое подготовлено для воздушного судна совершенно другого типа и/или модели. В такой ситуации прибывающее воздушное судно может быть случайно повреждено по той причине, что, например, крыло или другая часть воздушного судна может столкнуться с грузовиками для перевозки багажа в месте стоянки, соединительным трапом, используемом для высадки пассажиров из воздушного судна, или даже самим зданием аэровокзала. Помимо того факта, что затраты на ремонт поврежденного воздушного судна являются очень высокими, столкновение между воздушным судном и любым другим объектом, может вызвать также травмы персонала в аэропорту/на воздушном судне, а также серьезные нарушения в воздушном движении вследствие длительных сроков ремонта, изменения графика полетов и т.п.
В настоящее время большинство коммерческих воздушных судов изготавливается с использованием большого объема композиционных материалов вместо легких металлов, которые были доминирующими несколько лет тому назад. Если воздушное судно, имеющее фюзеляж, изготовленный полностью или частично из композиционного материала, сталкивается с инородным объектом, например, в месте стоянки, существует большой риск того, что фактическое повреждение, например, малые трещины в композиционном материале, будет очень трудно обнаружить только визуальным осмотром. Таким образом, вследствие очень высоких требований к безопасности, даже незначительное столкновение потребует обширного выявления дефектов на воздушном судне.
Некоторые известные системы стыковки воздушного судна с трапом пробуют решить эту проблему, отображая тип и/или модель ожидаемого воздушного судна в месте стоянки. Такая система раскрыта в ЕР 2660153, где описаны способ и устройство для идентификации воздушного судна в связи с его парковкой на месте стоянки. Однако пилот при неудачных обстоятельствах, например, из-за ошибки, может выбрать игнорирование этой информации и, несмотря на это, приближение к месту стоянки.
Альтернативно, информация, отображаемая системой установки на место стоянки, может быть правильной, но пилот поведет воздушное судно к несоответствующему месту стоянки, то есть месту стоянки, назначенному другому воздушному судну. Кроме того, тогда воздушное судно может быть случайно повреждено при столкновении с грузовиками для перевозки багажа, трапом, или даже зданием аэровокзала.
Сущность изобретения
Ввиду вышеизложенного цель изобретения состоит в том, чтобы устранить или по меньшей мере уменьшить один или несколько из рассмотренных выше недостатков. В основном вышеупомянутая цель достигается в соответствии с независимыми пунктами приложенной формулы изобретения.
Согласно первому аспекту данное изобретение реализуется способом для идентификации воздушного судна в связи с местом стоянки, включающим:
прием идентифицирующих данных и данных местоположения, передаваемых с воздушного судна, сравнение принятых данных местоположения по меньшей мере с одной позицией в заданной зоне в связи с местом стоянки, если принятые данные местоположения соответствуют по меньшей мере одной позиции в заданной зоне:
определение на основе идентифицирующих данных, ожидается ли упомянутое воздушное судно в месте стоянки, и если упомянутое воздушное судно не ожидается в месте стоянки: отображение уведомления на дисплее.
Способ согласно изобретению предлагает средства для минимизации риска несчастных случаев, случающихся во время процедуры стыковки воздушного судна с трапом. Кроме того, уменьшается риск повреждения воздушного судна или другого оборудования такого как, например, багажные вагоны и трапы.
Способ может дополнительно включать сравнение идентифицирующих данных воздушного судна, ожидаемого в месте стоянки, с идентифицирующими данными упомянутого воздушного судна, чтобы определить, ожидается ли упомянутое воздушное судно в месте стоянки.
Преимуществом этой формы осуществления изобретения является то, что достоверное определение может быть сделано на основе любых идентифицирующих данных, связанных с воздушным судном.
Способ может дополнительно включать: запрашивание типа и/или модели упомянутого воздушного судна из базы данных преобразования на основании идентифицирующих данных и сравнение типа и/или модели воздушного судна, ожидаемого в месте стоянки, с типом и/или моделью упомянутого воздушного судна, чтобы определить, ожидается ли упомянутое воздушное судно в месте стоянки. Преимуществом этой формы осуществления изобретения является то, что достоверное определение может быть сделано на основе типа и/или модели воздушного судна.
Способ может дополнительно включать то, что база данных преобразования функционально связана с рабочей базой данных аэропорта.
Преимуществом этой формы осуществления изобретения является то, что данные, касающиеся воздушного судна, могут легко выбираться и обеспечивается надежная связь между опознавательным кодом воздушного судна и его типом и/или моделью.
Способ может дополнительно включать отображение уведомления на дисплее, включая отображение чего-либо из следующего: индикации для остановки упомянутого воздушного судна, индикации для приближения к месту стоянки и индикации для перемещения упомянутого воздушного судна в другое место.
Преимуществом этой формы осуществления изобретения является то, что уменьшается риск несчастных случаев, случающихся, когда воздушное судно приближается к месту стоянки.
Способ может дополнительно включать в случае отображения индикации для приближения к месту стоянки перемещение трапа в месте стоянки в безопасное положение, или установку трапа в месте стоянки на тип и/или модель упомянутого воздушного судна.
Преимуществом этой формы осуществления изобретения является то, что дополнительно уменьшается риск несчастных случаев, случающихся, когда воздушное судно приближается к месту стоянки. Преимуществом помимо уменьшения риска, например, столкновения между воздушным судном и посторонними предметами, перемещения трапа в безопасное положение, которое не соответствует полной уборке трапа, является то, что время для парковки воздушного судна может быть уменьшено.
Способ может дополнительно включать в случае отображения индикации для остановки упомянутого воздушного судна или отображения индикации для приближения к месту стоянки: передачу данных перемещения в другое место на воздушное судно, ожидаемое в месте стоянки.
Преимуществом этой формы осуществления изобретения является то, что ожидаемое воздушное судно может быть безопасно перенаправлено к другому месту, таким образом минимизируется риск случающихся несчастных случаев и/или беспорядков, возникающих в аэропорту.
Способ может дополнительно включать проверку типа и/или модели упомянутого воздушного судна с использованием лазерной системы проверки.
Преимуществом этой формы осуществления изобретения является то, что тип и/или модель приближающегося воздушного судна могут быть определены более надежно.
Согласно второму аспекту изобретения данное изобретение реализуется системой идентификации воздушного судна для идентификации воздушного судна в связи с местом стоянки, содержащей: приемник, сконфигурированный для приема идентифицирующих данных и данных местоположения, передаваемых с воздушного судна, процессор, сконфигурированный для сравнения принятых данных местоположения по меньшей мере с одной позицией в заданной зоне в связи с местом стоянки и определения, соответствуют ли принятые данные местоположения по меньшей мере одной упомянутой позиции в заданной зоне; процессор, сконфигурированный для определения на основе идентифицирующих данных, если принятые данные местоположения соответствуют по меньшей мере одной позиции в заданной зоне, ожидается ли упомянутое воздушное судно в месте стоянки, и процессор, сконфигурированный для подачи команды дисплею отобразить уведомление, если упомянутое воздушное судно не ожидается в месте стоянки.
Система может дополнительно содержать: процессор, сконфигурированный для сравнения идентифицирующих данных воздушного судна, ожидаемого в месте стоянки, с идентифицирующими данными упомянутого воздушного судна, чтобы определить, ожидается ли упомянутое воздушное судно в месте стоянки.
Процессор может быть сконфигурирован для запрашивания типа и/или модели упомянутого воздушного судна из базы данных преобразования на основе идентифицирующих данных, и процессор может быть сконфигурирован для сравнения типа и/или модели воздушного судна, ожидаемого в месте стоянки, с типом и/или моделью упомянутого воздушного судна.
База данных преобразования может быть функционально связана с рабочей базой данных аэропорта.
Процессор может быть сконфигурирован для подачи команды дисплею на что-либо из следующего: индикацию для остановки упомянутого воздушного судна, индикацию для приближения к месту стоянки, и индикацию для перемещения упомянутого воздушного судно в другое место.
Процессор может быть сконфигурирован для подачи команды устройству управления трапом на перемещения трапа в месте стоянки в безопасное положение, или процессор может быть сконфигурирован для установки трапа на тип и/или модель упомянутого воздушного судна, если отображается индикация для приближения к месту стоянки.
Процессор может быть сконфигурирован для передачи данных перемещения в другое место ожидаемому воздушному судну, если отображается индикация для остановки упомянутого воздушного судна или если отображается индикация для приближения к месту стоянки.
Система может содержать лазерную систему проверки, предназначенную для проверки типа и/или модели упомянутого воздушного судна.
Другие цели, особенности и преимущества данного изобретения будут очевидны из следующего подробного описания, приложенной формул изобретения, а также из чертежей.
Вообще, все термины, используемые в формуле изобретения, должны интерпретироваться согласно их обыкновенному значению в область техники, если здесь явно не определено иное. Все ссылки на "элемент, устройство, компонент, средство, шаг и т.д." должны интерпретироваться прямо как относящиеся по меньшей мере к одному экземпляру упомянутого элемента, устройства, компонента, способа, шага и т.п., если явно не заявлено иное. Шаги любого раскрытого здесь способа не обязательно должны выполняться точно в раскрытом порядке, если это не заявлено явно. Кроме того, слово "содержащий" не исключает другие элементы или шаги.
Краткое описание чертежей
Другие особенности и преимущества данного изобретения станут очевидными из следующего подробного описания предпочтительных форм осуществления, приводимого со ссылкой на приложенные чертежи, на которых:
Фиг. 1 - схематическая иллюстрация формы осуществления системы согласно изобретению.
Фиг. 2 - схематическая иллюстрация формы осуществления системы согласно изобретению.
Фиг. 3a-d - схематические иллюстрации части формы осуществления системы согласно изобретению.
Подробное описание предпочтительных форм осуществления изобретения
Данное изобретение будет теперь описано более полно в дальнейшем со ссылкой на прилагаемые чертежи, на которых показаны некоторые формы осуществления изобретения. Это изобретение, однако, может быть воплощено во многих различных формах и не должно рассматриваться как ограниченное описанными здесь формами осуществления; напротив, эти формы осуществления изобретения приводятся в качестве примера так, чтобы это описание стало полным и завершенным, и полностью передало объем изобретения специалистам. Подобные номера позиций относятся к подобным элементам во всем описании изобретения.
Данное изобретение предлагает средства для идентификации воздушного судна в связи с местом стоянки, например в ситуации, когда воздушное судно приближается к месту стоянки. Дополнительно оно позволяет адаптацию оборудования в месте стоянки к приближающемуся воздушному судну. Кроме того, ошибки в базе AODB могут обрабатываться эффективным образом. Дополнительно, могут быть решены проблемы, связанные с пилотом, двигающимся к несоответствующему месту стоянки.
Способ и/или система согласно изобретению может выполняться в системе парковки воздушного судна или соединяться с ней. Тогда дисплей, упомянутый в связи с системой согласно изобретению, является дисплеем системы парковки воздушного судна, и система согласно изобретению связана с упомянутым дисплеем. Альтернативно, способ и/или система согласно изобретению может содержать по меньшей мере одну систему парковки воздушного судна. Термин дисплей должен рассматриваться как единственный дисплей или множество дисплеев, и особенности дисплея, рассматриваемого здесь, могут быть реализованы на одном дисплее, или на нескольких дисплеях, расположенных в соединении друг с другом. В одной форме осуществления изобретения первый дисплей размещается в конце места стоянки вблизи позиции остановки воздушного судна, например, на внешней стене здания аэровокзала, а второй дисплей размещается в начале места стоянки, то есть вблизи точки входа в место стоянки, видимой с рулежной дорожки, или рядом с рулежной дорожкой вблизи места стоянки. Второй дисплей может упоминаться также как дополнительный дисплей.
Альтернативно, дисплей может располагаться в кабине воздушного судна так, что пилот может наблюдать его, когда воздушное судно приближается к месту стоянки.
Первый дисплей может отображать по меньшей мере одно из типа воздушного судна, модели, позывного, адреса Международной организации гражданской авиации (International Civil Aviation Organization, ICAO) и расстояния до позиции остановки. Расстояние до позиции остановки может измеряться с использованием лазерной дальномерной системы. Первый дисплей может дополнительно отображать положение приближающегося воздушного судна относительно средней линии места стоянки, на котором размещается система парковки воздушного судна. Такая система раскрыта, например, в документе PCT/SE94/00968.
Для простоты в нижеследующем тексте дисплей будет описан как один дисплей, включающий все раскрытые выше особенности.
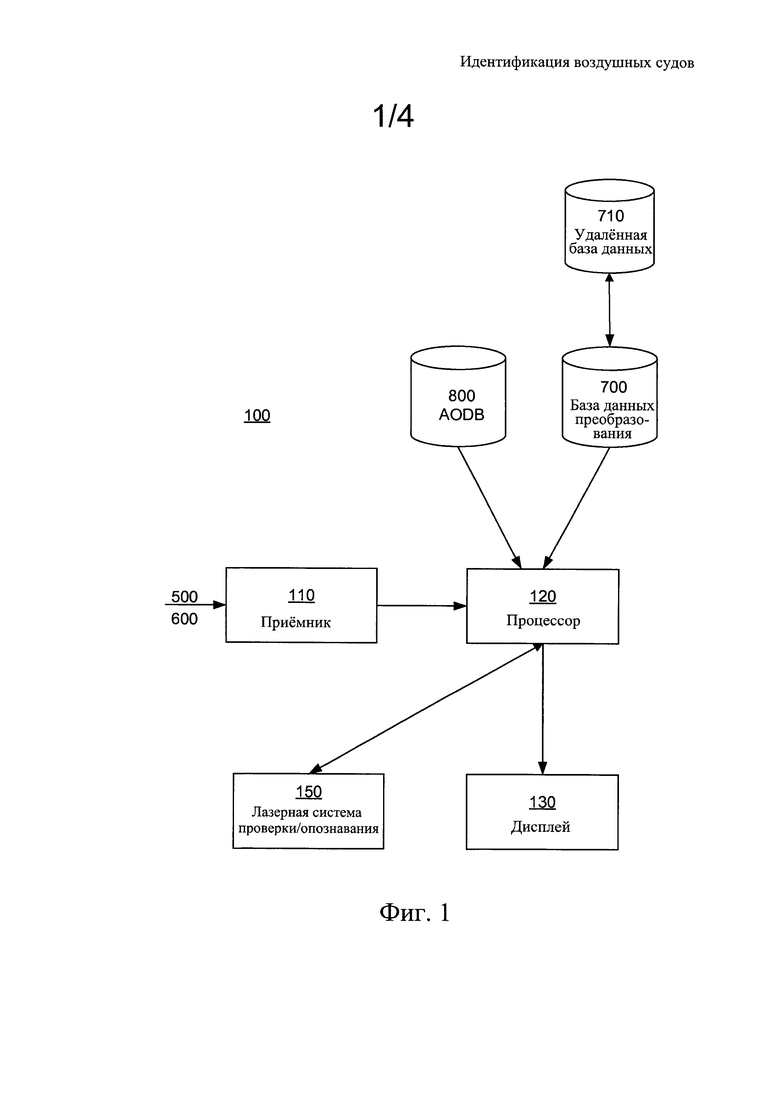
Ниже будут описаны формы осуществления системы идентификации воздушного судна согласно изобретению. Фиг. 1 представляет собой схематическую иллюстрацию формы осуществления системы идентификации воздушного судна согласно изобретению для идентификации воздушного судна в связи с местом стоянки.
Система 100 содержит приемник 110, процессор 120, соединенный с приемником 110, и дисплей 130, поддерживающий связь с процессором 120, как обозначено стрелками на фиг. 1. Приемник 110 сконфигурирован для приема идентифицирующих данных 500, таких как опознавательный код, и данных 600 местоположения, передаваемых с воздушного судна. Идентифицирующие данные и данные местоположения могут передаваться с использованием, например, системы автоматического зависимого наблюдения-вещания (Automatic Dependent Surveillance-Broadcast, ADS-B) или системы с адресным запросом воздушного судна (MODE-SELECT, Mode-S). Опознавательный код предпочтительно является уникальным числом, которое может быть представлено в соответствующей системе счисления, такой как двоичная, шестнадцатеричная, восьмеричная, десятичная и т.д., и которое идентифицирует воздушное судно. Опознавательный код может быть представлен также алфавитно-цифровой строкой. Такой опознавательный код обычно выпускается национальной авиационной администрацией, когда воздушное судно регистрируется. Даже при том, что такие опознавательные коды воздушного судна уникальны, некоторые национальные авиационные администрации позволяют повторно использовать их, когда воздушное судно снимается с эксплуатации. Согласно предпочтительной форме осуществления данного изобретения опознавательный код хранится в базе 700 данных преобразования. База данных преобразования содержит также данные воздушного судна, касающиеся типа и/или модели каждого воздушного судна, хранящегося в ней. База 700 данных преобразования обеспечивает надежную ассоциацию между опознавательным кодом и типом и/или моделью воздушного судна так, что процессор 120 может запросить информацию, которая касается типа и/или модели воздушного судна, из базы 700 данных преобразования, предоставляя опознавательный код.
База 700 данных преобразования обычно содержит данные, которые синхронизируются с удаленной базой 710 данных, находящейся под контролем национального авиационного управления.
Альтернативно или дополнительно идентифицирующими данными могут быть, например, номер рейса, код ICAO для летно-эксплуатационного предприятия, сопровождаемый номером рейса, регистрационной маркировкой воздушного судна (обычно опознавательным кодом в алфавитно-цифровом формате) и/или позывным, определяемым военными властями. Как будет описано более подробно ниже, процессор 120 предпочтительно функционально связан и с базой 700 данных преобразования и с рабочей базой 800 данных аэропорта (AODB). В одной форме осуществления изобретения база 700 данных преобразования и база AODB 800 выполняются как одна общая база данных, причем хранящиеся в ней данные, касающиеся воздушного судна, могут выбираться на основании определенных запросов. Для простоты раскрытия изобретения база 700 данных преобразования и база AODB 800 ниже будут описаны как два объекта.
Данные местоположения могут определяться с использованием, например, Глобальной системы определения местоположения (Global Positioning System, GPS), эти данные могут предоставляться системой GPS на борту воздушного судна.
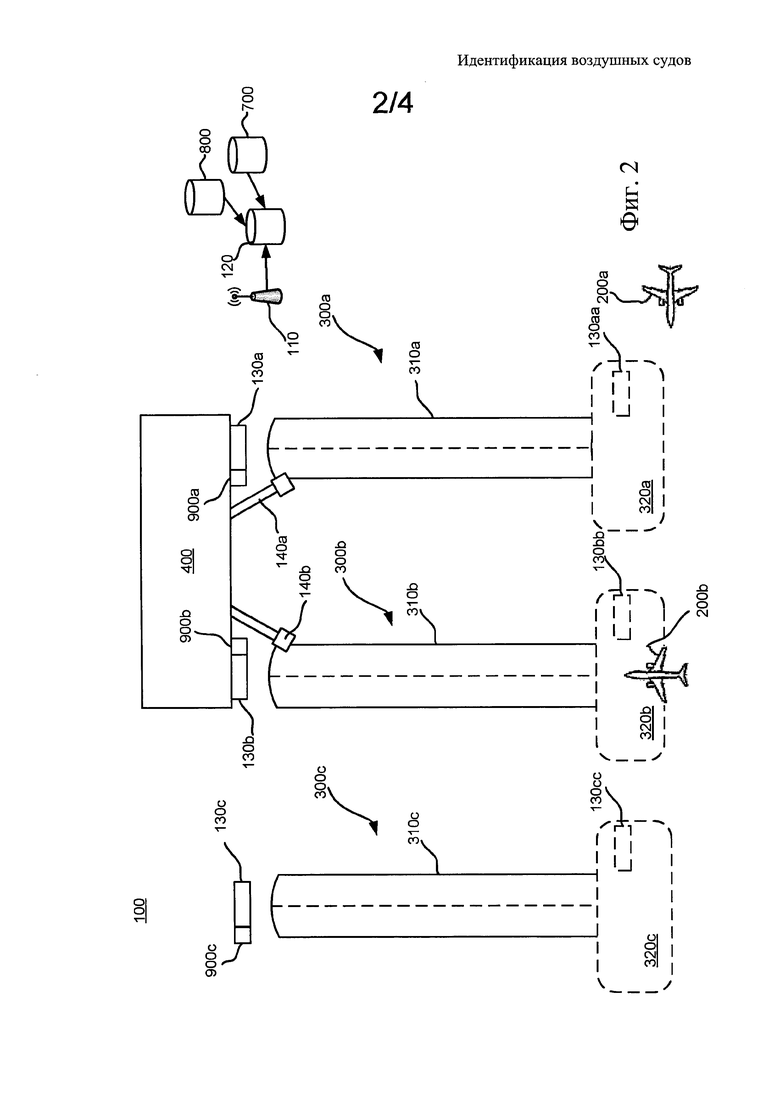
Данные местоположения могут определяться с использованием мультилатерации, которая обеспечивает точное определение местоположения воздушного судна, используя разницу времени приема сигнала (Time Difference Of Arrival, TDOA). Мультилатерация использует множество наземных станций, которые размещаются в определенных местах вокруг аэропорта. Наземные станции обычно принимают ответы на сигналы запроса, передаваемые локальным вторичным обзорным радиолокатором или станцией мультилатерации. Так как расстояние между воздушным судном и каждой из наземных станций отличается, ответы, принимаемые каждой станцией, приходят в немного различные моменты. На основании индивидуальных разниц во времени может быть точно рассчитано местоположение воздушного судна. Мультилатерация обычно использует ответы от транспондеров в режимах Mode А, С и S, транспондеров военной системы опознавания "свой-чужой" (Identification Friend or Foe, IFF) и транспондеров ADS-B. Система теперь будет описана со ссылкой на фиг. 1 и 2. На фиг. 2 показана форма осуществления системы идентификации воздушного судна согласно изобретению. Система 100 содержит приемник 110 и процессор 120, показанные на фиг. 1. Хотя фиг. 2 содержит только один приемник, следует отметить, что система может содержать множество приемников. Процессор может быть реализован как множество компьютерных блоков обработки данных, которые вместе формируют процессор, то есть множество компьютеров может быть связано, чтобы формировать процессор и его функциональные возможности, которые раскрыты здесь. Функция процессора может быть разделена между множеством блоков в аэропорту. Кроме того, система 101 содержит дисплеи 130а-с и, необязательно, дисплеи 130аа-130сс.
На фиг. 2 показано также здание 400 аэровокзала, воздушные суда 200а-b, которые собираются состыковываться, места 300а-с стоянки, зоны 310а-с стоянки и дополнительные зоны 320аа-сс. Каждое место 300а, b стоянки может иметь телескопический трап 140а, b для стыковки воздушного судна со зданием 400 аэровокзала.
В аэропорту прибывающее воздушное судно передвигается от взлетно-посадочной полосы по рулежной дорожке к зданиям аэропорта, таким как основные здания 400 или ангары, и местам 300 стоянки, где воздушные суда размещаются. Места стоянки могут быть расположены близко к основным зданиям или удаленно от них, то есть места стоянки определяют зону парковки для воздушного судна где-нибудь в аэропорту. Рулежная дорожка обычно указывается на взлетной полосе с покрытием окрашенной линией руления, которая помогает пилоту в управлении рулением воздушного судна к местам 300 стоянки. В местах 300 стоянки линия руления обычно разделяется на центровые линии, каждая из которых входит в соответствующее место 300 стоянки и оканчивается в точке остановки для воздушного судна. Обычно каждое место стоянки снабжается одной или несколькими центровыми линиями, чтобы позволить воздушному судну различных размеров безопасно приблизиться к точке остановки, придерживаясь соответствующей центровой линии. В связи с каждым местом 300 стоянки может быть определена зона. Эта зона предпочтительно определяется как начинающаяся в точке, где линия руления разделяется на одну или несколько центровых линий, и простирается немного за точку остановки. Зона предпочтительно простирается поперечно от центровой линии и заканчивается на безопасном расстоянии от соседних мест стоянки и/или зданий так, что риск, что какая-либо часть самолета столкнется с каким-либо инородным объектом, минимизируется.
Процессор 120 сконфигурирован для сравнения данных местоположения, принимаемых с каждого воздушного судна 200а-b, по меньшей мере с одной позицией в заданной зоне, такой как зона, определенная выше, в связи с местом 300 стоянки, к которому назначается каждое воздушное судно. Заданная зона устанавливается, например, после инсталляции системы. Заданная зона может быть установлена равной зоне места стоянки. В качестве альтернативы заданная зона может быть установлена включающей зону 310 места стоянки и дополнительную зону 320. Дополнительная зона может быть, например, частью рулежной дорожки, находящейся наиболее близко к месту стоянки. Заданная зона может быть установлена, например, так, чтобы быть относительно уверенным, к какому месту стоянки направляется воздушное судно. Заданная зона может иметь прямоугольную форму с длиной и шириной, установленными в соответствии с доступным пространством, зарезервированным для каждого места стоянки. Заданная зона может иметь другие формы, такие как многоугольная форма, круглая, эллиптическая и т.п.в зависимости от размещения мест стоянки в аэропорту. Заданная зона может быть определена геозоной, то есть виртуальным периметром для реальной географической зоны в месте стоянки, или как одна или несколько географических точек, постоянно находящихся в реальной географической зоне в месте стоянки.
Если принимаемые данные местоположения соответствуют по меньшей мере одной позиции в заданной зоне, процессор конфигурируется для определения на основании идентифицирующих данных, ожидается ли воздушное судно в месте стоянки.
В одной форме осуществления изобретения процессор сконфигурирован для сравнения опознавательного кода ожидаемого воздушного судна с опознавательным кодом приближающегося воздушного судна. В дополнение или в качестве альтернативы процессор сконфигурирован для сравнения типа и/или модели ожидаемого воздушного судна с типом и/или моделью приближающегося воздушного судна. С этой целью процессор сконфигурирован для извлечения типа и/или модели воздушного судна из базы AODB или базы 700 данных преобразования на основании идентифицирующих данных.
Как указано выше, база 700 данных преобразования предпочтительно функционально связана с базой AODB 800, чтобы обеспечивать надежную ассоциацию между опознавательным кодом воздушного судна и соответствующим типом и/или моделью воздушного судна. В дополнение или в качестве альтернативы база AODB может содержать также данные, которые связывают определенный опознавательный код воздушного судна с типом и/или моделью воздушного судна. В предпочтительной форме осуществления на основании идентифицирующих данных 500, принятых приемником 110, процессор конфигурируется для запроса из базы AODB 800 или базы 700 данных преобразования посредством технологии проводной или беспроводной связи (например, Wi-Fi (Wireless Fidelity - "беспроводная достоверность") или другой радиосвязи) типа и/или модели, соответствующих идентифицирующим данным 500 воздушного судна. База AODB 800 и/или база данных преобразования локально могут находиться в аэропорту или удаленно от него. База AODB 800 и/или база данных преобразования могут быть связаны с множеством аэропортов и совместно использоваться ими.
Как упомянуто выше, база 700 данных преобразования обычно содержит данные, которые синхронизируются с удаленной базой 710 данных, находящейся под управлением национальной авиационной администрации. Данные могут синхронизироваться с очень короткими интервалами, например, каждую секунду, минуту или час, или более редко, например, каждый день, неделю или месяц. Данные в удаленной базе данных обновляется национальной авиационной администрацией, например, когда новое воздушное судно регистрируется в базе данных. Однако, время, которое требуется национальной авиационной администрации, чтобы полностью обработать данные регистрации нового воздушного судна, то есть время от того как заявка на регистрацию регистрируется, например, корпорацией авиакомпаний, до того как удаленная база данных обновляется (даже при том, что регистрация была предоставлена), может занять много недель или даже месяцев. Кроме того, как упомянуто выше, некоторые национальные авиационные администрации позволяют повторно использовать опознавательные коды, когда воздушное судно снимается с эксплуатации. Это может привести к тому, что локальные копии базы данных могут испытывать недостаток идентифицирующих данных или даже иметь неправильные данные в течение некоторого периода времени.
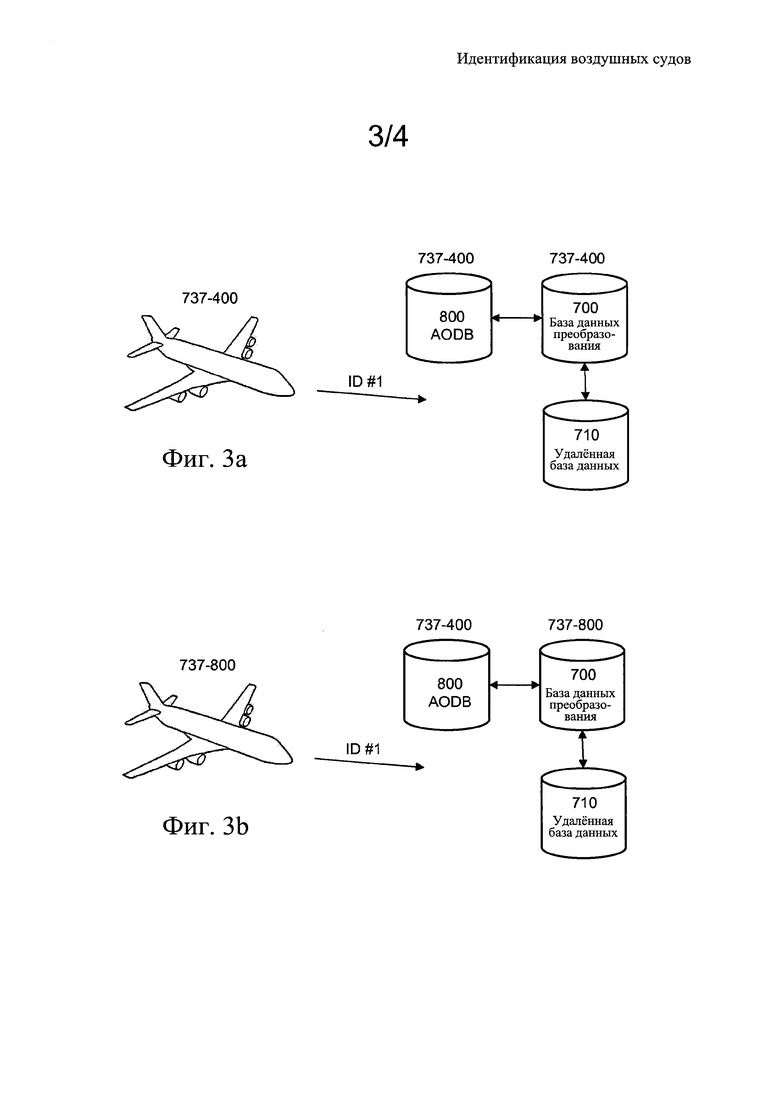
Как показано на фиг. 3а, в одной форме осуществления изобретения процессор 120 выполнен с возможностью сравнения типа и/или модели из базы 700 данных преобразования и базы AODB 700. Данные, касающиеся типа и/или модели воздушного судна, хранящиеся в базе AODB 800, могут быть основаны, например, на плане полета воздушного судна. В качестве примера план полета воздушного судна, возможно, был установлен за несколько месяцев до того, как было запланировано прибытие воздушного судно в аэропорт, и включает среди прочего, что воздушное судно, запланированное для полета, имеет тип 737-400.
В первом примере, показанном на фиг. 3а, по прибытию в аэропорт воздушное судно передает свои идентифицирующие данные (ID#1) (например, опознавательный код, описанный выше) в систему, изображенную на фиг. 1, которая по соображениям ясности показана на фиг. 3а частично. Идентифицирующие данные, показанные на фиг. 3а, пересылаются в базу 700 данных преобразования, которая преобразует опознавательный код в данные типа и/или модели воздушного судна. Преобразование основано на регистрации, выполненной национальной авиационной администрацией. После выборки преобразованного типа и/или модели воздушного судна процессор сравнивает данные, выбранные из базы AODB 800 и базы 700 данных преобразования, и если тип и/или модель совпадают, то имеется высокая вероятность, что типом и/или моделью воздушного судна являются 737-400. Чтобы еще больше повысить безопасность, процессор может выдать команду лазерной системе 150 проверки/идентификации проверить, что воздушное судно является судном 737-400, когда воздушное судно приближается к месту стоянки.
Во втором примере, показанном на фиг. 3b, может быть, что план полета был изменен после его первоначального установления. Для примера тип и/или модель воздушного судна, возможно, были изменены на поздней стадии, например, из-за увеличения или уменьшения числа пассажиров. Обновленный план полета может поэтому включать то, что типом и/или моделью воздушного судна являются, например, 737-800.
В некоторых ситуациях база AODB 800 не была обновлена новым планом полета и, следовательно, продолжает содержать, что тип и/или модель прибывающего воздушного судна - 737-400. Как и вышеприведенном примере, по прибытию в аэропорт воздушное судно передает свои идентифицирующие данные в систему, показанную на фиг. 1. Идентифицирующие данные, как показано на фиг. 3b, пересылаются в базу 700 данных преобразования, которая правильно преобразует опознавательный код в 737-800. Когда процессор сравнивает преобразованный тип и/или модель воздушного судна с данными, выбранными из базы AODB 800, идентифицируется несовпадение, так как база AODB сообщает 737-400, в то время как база данных преобразования сообщает 737-800.
Процессор может в этой ситуация подать команду лазерной системе 150 проверки/опознавания проверить, имеет ли приближающееся воздушное судно модель и/или тип 737-400 или 737-800. Как будет описано более подробно ниже, эта ситуация может быть безопасно обработана системой согласно изобретению.
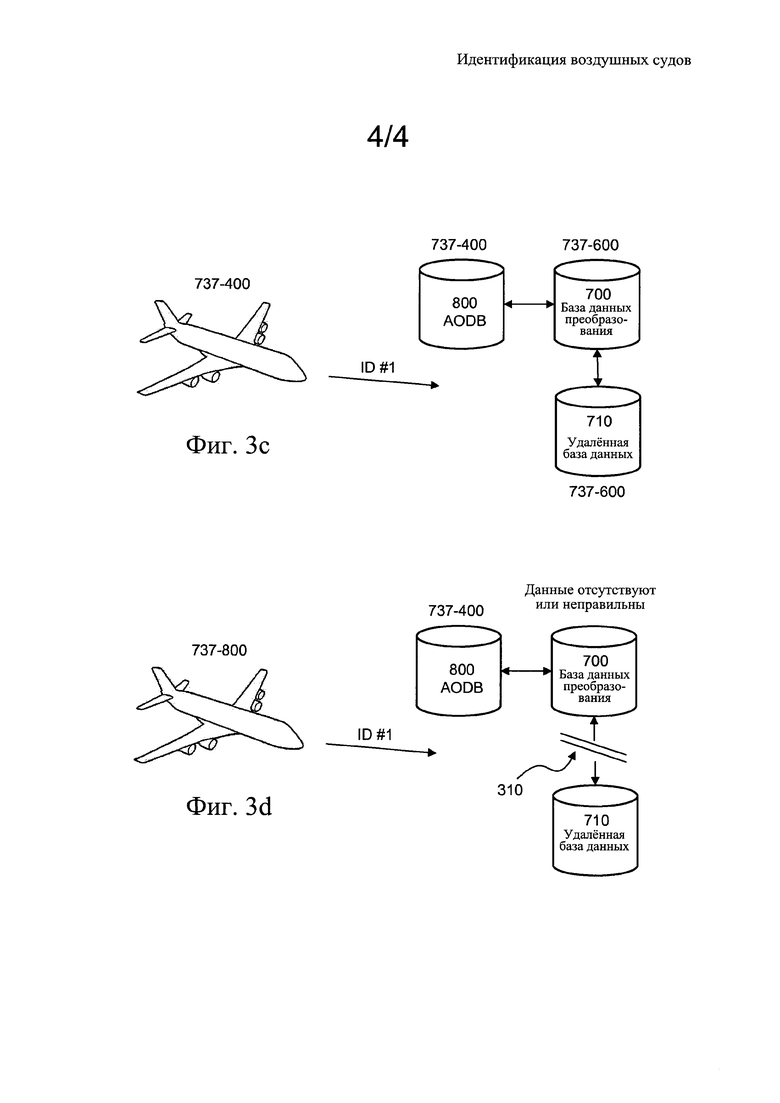
В третьем примере, показанном на фиг. 3с, план полета не был изменен и тип и/или модель приближающегося воздушного судна соответствуют типу и/или модели, хранящимся в базе AODB 800.
Однако, так как данные в базе 700 данных преобразования обычно синхронизируется с удаленной базой 710 данных, любая ошибка в удаленной базе данных будет отражена в базе 700 данных преобразования. Ошибка может иметь свое происхождение в ошибке оператора, то есть человек, вводящий данные в удаленную базу данных, делает ошибку при наборе на клавиатуре, или может заключаться в том, что новое воздушное судно было зарегистрировано, но база данных не была обновлена. Эта ситуация также может возникнуть даже если нет никакой синхронизации между базой 700 данных преобразования и удаленной базой 710 данных, но ошибка была введена прямо в базу 700 данных преобразования, например из-за ошибки оператора при вводе данных в базу данных.
Как и вышеприведенном примере, по прибытию в аэропорт воздушное судно передает свои идентифицирующие данные в систему, показанную на фиг. 1. Идентифицирующие данные, как показано на фиг. 3с, пересылаются в базу 700 данных преобразования, которая, из-за ошибки в базе данных неправильно преобразует опознавательный код в 737-600. Когда процессор сравнивает преобразованные тип и/или модель воздушного судна с данными, выбранными из базы AODB 800, обнаруживается несовпадение, так как база AODB сообщает 737-400, в то время как база данных преобразования сообщает 737-600.
В этой ситуации процессор может подать команду лазерной системе 150 проверки/опознавания проверить, имеет ли приближающееся воздушное судно тип и/или модель 737-400 или 737-600. Как будет раскрыто более подробно ниже, эта ситуация также может быть безопасно обработана системой согласно изобретению.
В четвертом примере, показанном на фиг. 3d, план полета не был изменен и тип, и/или модель приближающегося воздушного судна соответствуют типу и/или модели, хранящимся в базе AODB 800.
Однако, может быть, что ошибка 310 связи присутствует между базой 700 данных преобразования и удаленной базой 710 данных. Это может привести к тому, что данные, касающиеся конкретного опознавательного кода, показанного на фиг. 3d, отсутствуют в базе 700 данных преобразования или неправильны. Отсутствующие или неправильные данные в базе данных преобразования также могут быть результатом рабочей ошибки в базе 700 данных преобразования.
Как и в вышеприведенном примере, по прибытию в аэропорт воздушное судно передает свои идентифицирующие данные в систему, показанную на фиг. 1. Идентифицирующие данные, как показано на фиг. 3d, пересылаются в базу 700 данных преобразования, которая, из-за отсутствующих или неправильных данных в базе данных возвращает неправильный тип и/или модель или вообще не возвращает никакого результата. Когда процессор сравнивает преобразованные тип и/или модель воздушного судна с данными, выбранными из базы AODB 800, обнаруживается несовпадение, так как база AODB сообщает 737-400, в то время как база данных преобразования сообщает о другом типе или вообще ничего не сообщает.
В этой ситуации процессор может подать команду лазерной системе 150 проверки/опознавания проверить, имеет ли приближающееся воздушное судно тип и/или модель 737-400. Как будет раскрыто более подробно ниже, эта ситуация также может быть безопасно обработана системой согласно изобретению.
Если тип и/или модель из базы 700 данных преобразования и базы AODB 800 не соответствуют друг другу, процессор может быть выполнен с возможностью передачи предупреждения по радио и/или посредством сигнализации с использованием дисплея пилоту приближающегося воздушного судна и/или командно-диспетчерскому пункту. Процессор также может быть выполнен с возможностью передачи запроса о типе и/или модели воздушного судна пилоту воздушного судна. Предупреждение может передаваться, например, как текстовое сообщение, которое отображается на дисплее на воздушном судне и/или командно-диспетчерском пункте. Альтернативно, предупреждение может быть заранее записанным сообщением и передаваться по радио на воздушное судно и/или командно-диспетчерский пункт или воспроизводиться через громкоговорители в аэропорту. Благодаря использованию лазерной системы 150 проверки/опознавания для проверки типа и/или модели приближающегося воздушного судна повышается уровень безопасности, так как любая неоднозначность между результатами, принимаемыми относительно типа и/или модели приближающегося воздушного судна, может быть разрешена. Это также применимо в случае, когда результаты из баз данных соответствуют друг другу, где лазерная система 150 проверки/опознавания будет обнаруживать любые ошибки, присутствующие в обеих базах данных, и предоставлять информацию процессору так, что могут быть приняты необходимые меры, как раскрыто ниже. Взаимодействие между базой AODB 800, базой 700 данных преобразования и лазерной системой 150 проверки/опознавания обеспечивает чрезвычайно высокий уровень безопасности при приеме воздушного судна в месте стоянки.
Дисплей 130 выполнен с возможностью отображения на нем уведомления, если воздушное судно не ожидается в месте стоянки. Уведомление может быть любым из следующего: индикацией для остановки воздушного судна, индикацией для приближения к месту стоянки и индикацией для перемещения воздушного судна в другое место. Уведомление может отображаться на любом из первых дисплеев 130а-130с, или любом из вторых дисплеев 130аа-130сс. В одной форме осуществления изобретения уведомление отображается и на первом дисплее и на втором дисплее.
Если система решает, что должна быть отображена индикация для приближения к месту стоянки, в одной форме осуществления изобретения процессор конфигурируется подачи команды устройству управления трапом на уборку трапа 140а, b в месте стоянки. В предпочтительной форме осуществления трап 140а, b перемещается в безопасное положение, которое минимизирует риск столкновения между трапом 140а, b и приближающимся воздушным судном. Безопасным положением может быть полная уборка трапа 140а, b в случае, если разность между приближающимся воздушным судном и ожидаемым будет большой, определяемой размером воздушного судна, или частичная уборка/перемещение в случае, если тип и/или модель воздушного судна будут похожими. Алгоритм для определения безопасного положения трапа 140а, b предпочтительно принимает во внимание как размеры воздушного судна, так и относительное расположение двигателей, крыльев и т.д. Альтернативно, процессор конфигурируется для установки трапа 140а, b для типа и/или модели воздушного судна. Процессор может быть выполнен с возможностью обновления базы данных типом и/или моделью воздушного судна. Таким образом, дисплеи в базе AODB и/или системе FIDS могут соответственно обновляться.
Процессор может быть выполнен с возможностью передачи данных перемещения на новое место на ожидаемое воздушное судно. Данные перемещения на новое место могут быть, например, "идти к месту стоянки 7". Данные перемещения на новое место затем предпочтительно отображаются на дисплее на воздушном судне. Альтернативно, данные перемещения на новое место могут представляться на первом и/или втором дисплее.
Если воздушное судно ожидается в месте стоянки, первый дисплей может конфигурироваться для отображения по меньшей мере одного из типа воздушного судна, модели, позывного, адреса ICAO и расстояния до позиции остановки.
Как упомянуто выше, независимо от того, ожидается ли приближающееся воздушное судно или нет, пилот может приглашаться сообщить тип и/или модель воздушного судна системе по радио, и/или через входной интерфейс, соединенный с процессором.
Система может содержать лазерную систему 900а-с проверки/опознавания, предназначенную для проверки типа и/или модели воздушного судна. Такая система раскрыта, например, в документах PCT/SE94/00968 и США 6563432.
Если тип и/или модель, полученные лазерной системой проверки/опознавания, не соответствуют типу и/или модели, выбранным из любой из баз данных, процессор может конфигурироваться для подачи команды устройству управления трапом переместить трап в месте стоянки в безопасное положение, чтобы уменьшить риск столкновения с воздушным судном. Дополнительно, процессор может быть выполнен с возможностью подачи команды устройству управления трапом установить трап на тип и/или модель воздушного судна, полученные лазерной системой опознавания.
Ниже, будет описан сценарий, в котором ожидаемое воздушное судно приближается к намеченному месту стоянки.
Воздушное судно 200а непрерывно передает по меньшей мере свои идентифицирующие данные 500 и данные 600 местоположения. Приемник 110 принимает идентифицирующие данные 500 и данные 600 местоположения и пересылает их в процессор 120. Процессор 120 сравнивает принимаемые данные местоположения по меньшей мере с одной позицией в заданной зоне в связи с местом стоянки. В этом примере заданная зона включает зону 310а места стоянки и дополнительную зону 320а. Когда воздушное судно 200а входит в заданную зону 310а, 320а, процессор 120 сравнивает идентифицирующие данные, тип и/или модель воздушного судна с идентифицирующими данными, типом и/или моделью ожидаемого воздушного судна и если сравнение положительно, определяется, что приближающееся воздушное судно является ожидаемым воздушным судном. Как описано выше, процессор выполнен с возможностью выборки идентифицирующих данных, типа и/или модели ожидаемого воздушного судна из базы 700 идентификации и/или базы AODB 800.
Поскольку в этом случае воздушное судно 200а ожидается в месте 300 стоянки, дисплей 130а конфигурируется для отображения по меньшей мере одного из типа воздушного судна, модели, позывного, адреса ICAO и расстояния до позиции остановки. Так как определяется, что приближающееся воздушное судно является ожидаемым воздушным судном, система может выбрать не использовать лазерную систему 900а проверки/опознавания для проверки типа и/или модели воздушного судна.
Необязательно, система содержит дополнительный дисплей 130аа, расположенный в дополнительной зоне 320а. Так как в этом случае воздушное судно 200а ожидается в месте 300 стоянки, дополнительный дисплей 130аа может отобразить приветственное и/или подтверждающее уведомление ожидаемому и приближающемуся воздушному судну 200а.
Ниже, будет описано множество сценариев, в которых воздушное судно 200b, приближающееся к месту 300 стоянки, не является ожидаемым воздушным судном 200а. Эта ситуация может возникнуть, например, если пилот занят своими мыслями.
Как и в предыдущем случае, воздушное судно 200b непрерывно передает (передает в режиме вещания) по меньшей мере свои идентифицирующие данные 500 и данные 600 местоположения. Приемник 110 принимает идентифицирующие данные 500 и данные 600 местоположения и пересылает данные в процессор 120. Процессор 120 сравнивает принимаемые данные местоположения по меньшей мере с одной позицией в заданной зоне в связи с местом стоянки. В этом примере заданная зона включает зону 310b места стоянки и дополнительную зону 320b.
Когда воздушное судно входит в заданную зону 310b, 320b, процессор 120 сравнивает идентифицирующие данные, тип и/или модель воздушного судна 200b с идентифицирующими данными, типом и/или моделью ожидаемого воздушного судна. Процессор 120 выполнен с возможностью выборки идентифицирующих данных, типа и/или модели ожидаемого воздушного судна из базы 700 данных преобразования и/или AODB 800. Так как сравнение дает в результате несовпадение, система может прийти к выводу, что воздушное судно 200b не является ожидаемым воздушным судном.
В качестве меры предосторожности система может использовать лазерную систему 900b проверки/опознавания для проверки/опознавания, соответствует ли тип и/или модель воздушного судна 200b ожидаемому воздушному судну; эта информация может использоваться процессором, чтобы решить, действительно ли следует позволить воздушному судну приблизиться к месту стоянки.
Так как в этом случае воздушное судно 200b не ожидается в месте стоянки, дисплей 130b конфигурируется для отображения какой-либо из индикации для остановки воздушного судна (такой как "STOP", "HALT" ("СТОЙ") или подобных), индикации для приближения к месту стоянки, и индикации для перемещения воздушного судна в другое место, например, место 300 с остановки. В качестве альтернативы или комбинации дополнительный дисплей 130bb может быть выполнен с возможностью отображения какой-либо из индикации для остановки воздушного судна, индикации для приближения к месту стоянки, и индикации для перемещения воздушного судна в другое место. Перед отображением индикации для перемещения воздушного судна в другое место система определяет это другое место, например, проверяя с помощью базы AODB 800 имеющиеся в распоряжении места стоянки.
В случае, если приближающееся воздушное судно 200b не является ожидаемым воздушным судном, но является судном того же самого типа, и/или модели, что и ожидаемое воздушное судно 200а, система может решить все же позволить воздушному судну приблизиться к месту 200b остановки.
Так как приближающееся воздушное судно является судном того же самого типа и/или модели, что и ожидаемое воздушное судно, никакая реконфигурация, например, трапа, не будет необходима в месте стоянки, чтобы принять воздушное судно.
Необязательно, дополнительный дисплей 130bb отображает индикацию для приближения к месту 200b остановки. Дисплей 130b в месте 200b остановки выполнен с возможностью отображения по меньшей мере одного из типа воздушного судна, модели, позывного, адреса ICAO и расстояния до позиции остановки для приближающегося (несоответствующего) воздушного судна 200b.
Система предпочтительно сконфигурирована для обновления базы AODB 800 по меньшей мере одними из идентифицирующих данных, типом и моделью несоответствующего воздушного судна. Система тогда сконфигурирована далее для сообщения информации аэродромному техническому персоналу, управлению аэропорта и пилоту. Кроме того, система сконфигурирована для передачи данных перемещения на новое место ожидаемому воздушному судну, например, используя систему ADS-B, или для отображения уведомления на дополнительном дисплее 130bb (предпочтительно, если воздушное судно 200b прошло дисплей 130Ыэ).
В случае, если приближающееся воздушное судно 200b, не является судном того же самого типа и/или модели, что и ожидаемое воздушное судно 200а, но воздушное судно 200b переместилось настолько, что трудно переместить его в другое место стоянки, система может решить все же позволить воздушному судну 200b приблизиться к месту 300b стоянки (которое не является запланированным местом стоянки для воздушного судна 200b).
Это решение может быть основано на том, как далеко в заданную зону переместилось воздушное судно, объеме реконфигурации, необходимой в месте стоянки, чтобы принять воздушное судно, имеются ли какие-либо другие доступные места стоянки и т.д.
При принятии этого решения система 100 может принимать во внимание также тип и/или модель воздушного судна в расположенных рядом местах стоянки. Эта информация может выбираться, например, из планов полета, имеющихся в базе AODB 800. Например, если воздушное судно в расположенном рядом месте стоянки имеет размер такой, что столкновение не может быть исключено с некоторой степенью уверенности в случае, если приближающемуся воздушному судну 200b, позволяется войти в зону места стоянки, система может решить отобразить "STOP" на дисплее 130b.
Независимо от ситуации, главное внимания при этом решении уделяется безопасности. Иначе говоря, безопасность воздушного судна, персонала, или оборудования в аэропорту не должна ухудшаться. Для примера, если длинное воздушное судно приближается к месту стоянки, в котором оно не ожидается, система может решить позволить воздушному судну безопасным образом приблизиться к месту стоянки даже при том, что будет невозможно пристыковать воздушное судно в месте стоянки (возможно, принимая во внимание воздушные суда, присутствующие в соседних местах стоянки). Процессор тогда подаст команду дисплею направить самолет вперед на расстояние, определяемое размером воздушного судна, в зону места стоянки так, чтобы как можно меньшая часть воздушного судна оставалась на рулежной дорожке вблизи места стоянки, таким образом уменьшая риск столкновения с другим воздушным судном, проходящим мимо по рулежной дорожке.
В случае если решается, что возможно реконфигурировать место стоянки для приема приближающегося воздушного судна, дополнительный дисплей 130bb отображает индикацию для приближения к месту 300b стоянки. Дисплей 130b в месте стоянки выполнен с возможностью отображения по меньшей мере одного из типа воздушного судна, модели, позывного, адреса ICAO и расстояния до позиции остановки для приближающегося (несоответствующего) воздушного судна. Кроме того, процессор 120 выполнен с возможностью установки трапа на тип и/или модель несоответствующего воздушного судна.
Система сконфигурирована для обновления базы AODB 800 по меньшей мере одними из идентифицирующих данных, типа и модели несоответствующего воздушного судна 200b. Система тогда дополнительно сконфигурирована для сообщения информации техническому персоналу аэродрома, управлению аэропорта и пилоту. Кроме того, система сконфигурирована для передачи данных перемещения в другое место ожидаемому воздушному судну 200а, например, путем отображения уведомления на дополнительном дисплее или на дисплее на воздушном судне.
В одной форме осуществления изобретения в случае, если приближающееся воздушное судно 200b не является судном того же самого типа и/или модели, что и ожидаемое воздушное судно 200а, система может решить отобразить индикацию для остановки воздушного судна (такую как "STOP", "HALT" ("СТОЙ") или подобную). Причиной может быть, например, то, что система нуждается во времени, чтобы оценить ситуацию или установить трап для несоответствующего воздушного судна 200b. Если пилот решает все же продолжить в месте 300b стоянки, процессор 120 может быть выполнен с возможностью попытки минимизировать риск несчастных случаев, например, подавая команду устройству управления трапом переместить трап в месте 300b стоянки в безопасное положение, как описано выше.
Система может быть выполнена с возможностью обновления базы AODB 800 по меньшей мере одними из идентифицирующих данных, типа и модели несоответствующего воздушного судна. Система может тогда дополнительно конфигурироваться для сообщения информации аэродромному техническому персоналу, управлению аэропорта и пилоту. Кроме того, система может быть выполнена с возможностью передачи данных перемещения в другое место ожидаемому воздушному судну, например, путем отображения уведомления на дополнительном дисплее 130bb или на дисплее на воздушном судне.
Ниже будет описан сценарий, в котором есть ошибка или противоречивость данных в базах 700 и 800 данных. Ожидаемое воздушное судно 200а приближается к намеченному месту 200а остановки. Воздушное судно 200а непрерывно передает (передает в вещательном режиме) по меньшей мере свои идентифицирующие данные и данные местоположения. Приемник 110 принимает идентифицирующие данные и данные местоположения, и процессор 120 сравнивает принятые данные местоположения по меньшей мере с одной позицией в заданной зоне 310а, 320а в связи с местом 300а стоянки. Когда воздушное судно 200а входит в заданную зону 310а, 320а, процессор 120 сравнивает идентифицирующие данные, тип и/или модель воздушного судна 200а с идентифицирующими данными, типом и/или моделью ожидаемого воздушного судна, выбранными из баз 700 и 800 данных.
Даже в том случае, когда воздушное судно 200а является ожидаемым воздушным судном, если в этом сценарии была ошибка, когда информация вводилась в базу AODB 700 (например, ошибка была первоначально введена в план полета, или последующее изменение было сделано в плане полета), и поэтому воздушное судно 200а, приближающееся к месту стоянки, не соответствует тому, что ожидается согласно базе AODB 800. Для примера, при вводе идентифицирующих данных в базу AODB 800, неправильный тип и/или модель были связаны с идентифицирующими данными.
Как описано выше, процессор 120 поддерживает связь с базой AODB 800 и базой 700 данных преобразования. Когда процессор 120 принимает опознавательный код от воздушного судна, нормальной процедурой является обращение к базе 700 данных преобразования, чтобы выбрать тип и/или модель воздушного судна на основании опознавательного кода. Эти выбранные тип и/или модель тогда могут быть сопоставлены с типом и/или моделью, зарегистрированными в плане полета в базе AODB 800. В этом случае сопоставляемые типы и/или модели не совпадают, так как ошибка была внесена в базу AODB 800.
Система может решить, что тип и/или модель в базе 700 данных преобразования являются правильными и поэтому конфигурироваться для обновления информации в базе AODB 800 на основании типа и/или модели, принимаемых из базы 700 данных преобразования.
Система может далее конфигурироваться для передачи предупреждения пилоту воздушного судна 200а и/или на командно-диспетчерский пункт. Дополнительно система может быть выполнена с возможностью посылки запроса о типе и/или модели воздушного судна 200а пилоту воздушного судна, чтобы получить дополнительное подтверждение, что тип и/или модель в базе 700 данных преобразования являются правильными.
Так как теперь подтверждено, что приближающееся воздушное судно 200а является также ожидаемым воздушным судном, дисплей 130а выполнен с возможностью отображения по меньшей мере одного из типа воздушного судна, модели, позывного, адреса ICAO и расстояния до позиции остановки приближающегося воздушного судна (которое является также ожидаемым). Однако если трап установлен на другой тип и/или модель из-за ошибки в базе AODB 800, дисплей 130а и/или 130аа может быть выполнен с возможностью отображения остановки. Кроме того, система может быть выполнена с возможностью подачи команды устройству управления трапом переместить трап в месте стоянки в безопасное положение. Альтернативно, система может быть выполнена с возможностью подачи команды устройству управления трапом установить трап на тип и/или модель воздушного судна, полученные из базы 700 данных преобразования.
Система может использовать лазерную систему 900а проверки/ опознавания для проверки/опознавания типа и/или модели воздушного судна 200а. То есть процессор 120 может первоначально предположить, что информация в базе 700 данных преобразования правильна, и запросить проверку этого предположения лазерной системой 900а проверки/опознавания. В одной форме осуществления изобретения система сконфигурирована для обновления базы AODB 800 на основании типа и/или модели, подтвержденных лазерной системой 900а опознавания. Процессор 120 также может первоначально предположить, что информация в базе AODB 800 правильна, и запросить проверку этого предположения лазерной системой 900а проверки/опознавания. Таким образом, результат из лазерной идентификации решает, является ли база AODB 800 или база 700 данных преобразования той базой данных, которая имеет правильные введенные данные.
Если трап установлен на другой тип и/или модель из-за ошибки в базе 700 данных преобразования и/или базе AODB 800, процессор может быть выполнен с возможностью подачи команды дисплею 130а и/или 130аа на отображение остановки и система может быть выполнена с возможностью подачи команды устройству управления трапом переместить трап на месте стоянки в безопасное положение.
Альтернативно, система может быть выполнена с возможностью подачи команды устройству управления трапом установить трап на тип и/или модель воздушного судна, полученные лазерной системой 900а опознавания. Дисплей 130а тогда конфигурируется для отображения по меньшей мере одного из типа воздушного судна, модели, позывного, адреса ICAO и расстояния до положения остановки приближающегося воздушного судна (которое является также ожидаемым).
Другие изменения раскрытых форм осуществления изобретения могут быть поняты и осуществлены специалистами в данной области техники при осуществлении на практике заявленного изобретения, из изучения чертежей, описания изобретения и прилагаемой формулы изобретения. В формуле изобретения слово "содержащий" не исключают другие элементы или шаги, и единственное число не исключает множественность. Одиночный процессор или другой блок могут выполнять функции нескольких элементов, перечисленных в формуле изобретения. Простой факт, что некоторые меры излагаются во взаимно различных зависимых пунктах, не указывает, что комбинация этих мер не может использоваться для получения преимуществ. Любые ссылочные позиции в формуле изобретения не должны рассматриваться как ограничивающие ее объем.
Группа изобретений относится к способу и системе идентификации воздушного судна в связи с местом стоянки. Для идентификации воздушного судна принимают идентификационные данные и данные местоположения, передаваемые с воздушного судна, извлекают идентификационные данные ожидаемого на месте стоянки судна, тип или модель воздушного судна, тип или модель воздушных судов на соседних местах и доступность других мест стоянки, сравнивают принятые данные местоположения с позицией в зоне места стоянки, сравнивают идентифицирующие данные ожидаемого воздушного судна с полученными данными от воздушного судна. Если воздушное судно не ожидается в месте стоянки, то отображают индикацию для остановки воздушного судна, разрешения приблизиться к месту стоянки или перемещения в другое место и передают данные для дальнейшего перемещения воздушного судна. Система содержит приемник данных с воздушного судна, процессор, сконфигурированный для выполнения способа. Обеспечивается безопасность при парковке воздушного судна. 2 н. и 8 з.п. ф-лы, 6 ил.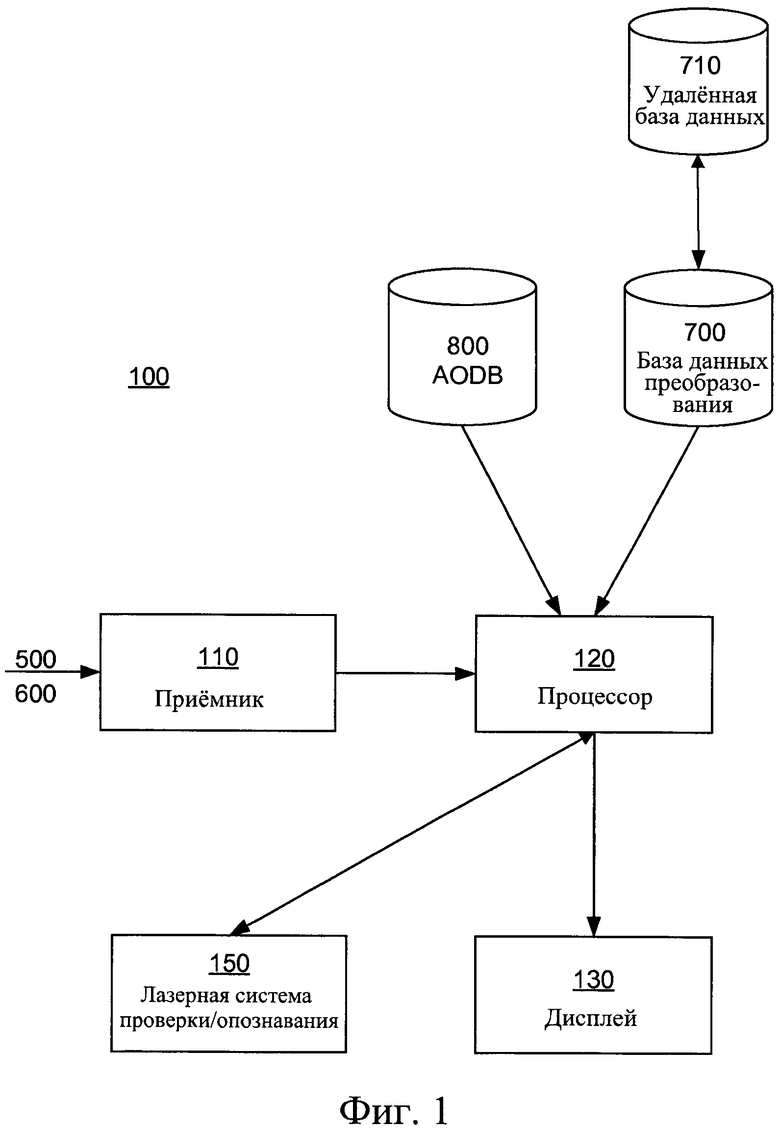
1. Способ, реализованный в системе (100) парковки воздушного судна, содержащей приемник (110), процессор (120) и дисплей (130), для идентификации воздушного судна в связи с местом (300) стоянки, имеющим заданную зону, согласно которому
приемник принимает идентифицирующие данные (500) и данные (600) местоположения, передаваемые с воздушного судна,
процессор (120) извлекает данные, включающие идентифицирующие данные, тип и/или модель воздушного судна, ожидаемого на месте стоянки, тип и/или модель воздушных судов на соседних местах стоянки и доступность других мест стоянки,
процессор (120) сравнивает принятые данные местоположения по меньшей мере с одной позицией в заданной зоне, включающей зону места (300) стоянки,
если принятые данные местоположения соответствуют по меньшей мере одной позиции в заданной зоне:
процессор (120) сравнивает идентифицирующие данные воздушного судна, ожидаемого в месте стоянки, с идентифицирующими данными упомянутого воздушного судна на основании принятых данных и определяет, ожидается ли упомянутое воздушное судно в месте (300) стоянки, и
если упомянутое воздушное судно не ожидается в месте (300) стоянки:
процессор (120) принимает решение отобразить индикацию для остановки воздушного судна, разрешения ему приблизиться к месту стоянки или перемещения его в другое место, при этом решение основано на принятых данных, и
дисплей (130), на основании упомянутого решения, отображает уведомление, выбранное из следующих:
индикация для остановки упомянутого воздушного судна,
индикация для приближения к месту стоянки, и
индикация для перемещения упомянутого воздушного судна в другое место, и
если отображена индикация для остановки воздушного судна или индикация для приближения к месту стоянки, процессор передает на воздушное судно, ожидаемое в месте стоянки, данные для перемещения в другое место.
2. Способ по п. 1, в котором определение, ожидается ли упомянутое воздушное судно в месте стоянки, включает:
запрос процессором типа и/или модели упомянутого воздушного судна из базы данных преобразования на основании идентифицирующих данных и
сравнение процессором типа и/или модели воздушного судна, ожидаемого в месте стоянки, с типом и/или моделью упомянутого воздушного судна.
3. Способ по п. 2, в котором база данных преобразования функционально связана с рабочей базой данных аэропорта.
4. Способ по п. 3, дополнительно включающий при отображении индикации для приближения к месту стоянки
подачу процессором устройству управления трапом команды на перемещение трапа в месте стоянки в безопасное положение или на установку трапа в месте стоянки на тип и/или модель упомянутого воздушного судна.
5. Способ по любому из пп. 2-4, дополнительно включающий проверку системой парковки воздушного судна типа и/или модели упомянутого воздушного судна с использованием лазерной системы проверки.
6. Система идентификации воздушного судна (100) для идентификации воздушного судна (200) в связи с местом (300) стоянки, содержащая:
приемник (110), сконфигурированный для приема идентифицирующих данных и данных местоположения, передаваемых с воздушного судна, и
процессор (120), сконфигурированный для извлечения данных, включающих идентифицирующие данные, тип и/или модель воздушного судна, ожидаемого на месте стоянки, тип и/или модель воздушных судов на соседних местах стоянки и доступность других мест стоянки,
при этом процессор (120) сконфигурирован для сравнения принятых данных местоположения по меньшей мере с одной позицией в заданной зоне в связи с упомянутым местом (300) стоянки и определения, соответствуют ли принятые данные местоположения по меньшей мере одной позиции в заданной зоне,
процессор (120) сконфигурирован для сравнения идентифицирующих данных воздушного судна, ожидаемого в месте (300) стоянки, с идентифицирующими данными упомянутого воздушного судна на основании принятых данных, и определения, если принятые данные местоположения соответствуют по меньшей мере одной позиции в заданной зоне, ожидается ли упомянутое воздушное судно в месте (300) стоянки,
процессор (120) сконфигурирован для принятия решения остановить воздушное судно, позволить ему приблизиться к месту стоянки или переместить его в другое место, причем решение основано на принятых данных, и
процессор (120) сконфигурирован для подачи команды дисплею (130) отобразить уведомление на основании упомянутого решения, если упомянутое воздушное судно не ожидается в месте стоянки, при этом процессор сконфигурирован для подачи команды дисплею отобразить уведомление, выбранное из следующих:
индикация для остановки упомянутого воздушного судна,
индикация для приближения к месту стоянки, и
индикация для перемещения упомянутого воздушного судна в другое место, и
процессор сконфигурирован для передачи на воздушное судно, ожидаемое в месте стоянки, данных для перемещения в другое место, если отображена индикация для остановки воздушного судна или если отображена индикация для приближения к месту стоянки.
7. Система по п. 6, в которой процессор, сконфигурированный для определения, ожидается ли упомянутое воздушное судно, дополнительно сконфигурирован
для запроса типа и/или модели упомянутого воздушного судна из базы данных преобразования на основании идентифицирующих данных и для сравнения типа и/или модели воздушного судна, ожидаемого в месте стоянки, с типом и/или моделью упомянутого воздушного судна.
8. Система по п. 7, в которой база данных преобразования функционально связана с рабочей базой данных аэропорта.
9. Система по п. 8, дополнительно содержащая
процессор, сконфигурированный для подачи команды управлению трапом переместить трап в месте стоянки в безопасную позицию, или процессор, сконфигурированный для установки трапа на тип и/или модель упомянутого воздушного судна, если отображается индикация для приближения к месту стоянки.
10. Система по любому из пп. 7-9, дополнительно содержащая
лазерную систему проверки, сконфигурированную для проверки типа и/или модели упомянутого воздушного судна.
| RU 2013119162 A, 27.10.2014 | |||
| ИДЕНТИФИКАЦИЯ САМОЛЕТА И СИСТЕМЫ УПРАВЛЕНИЯ ШВАРТОВКОЙ | 1994 |
|
RU2155384C2 |
| US 6324489 B1, 27.11.2001 | |||
| US 7702453 B2, 20.04.2010 | |||
| RU 2160930 C1, 20.12.2000. | |||

