Область техники
Настоящее изобретение в целом относится к системам парковки воздушного судна и в частности к системе парковки воздушного судна, выполненной с возможностью принимать информацию из системы наблюдения аэропорта и использовать принятую информацию при управлении системой верификации и позиционирования на основе света в процессе направления самолета к месту стоянки.
Уровень техники
В крупных аэропортах обычной практикой является использование пассажирских трапов, чтобы способствовать перемещению пассажиров на воздушные суда и обратно. Обычно пассажирские трапы являются регулируемыми по высоте и телескопически расширяемыми, так что пассажиры могут входить в воздушное судно и выходить из него, не подвергаясь воздействию атмосферы и без необходимости входить в зону парковки или места стоянки, где паркуется воздушное судно.
Для того чтобы можно было присоединить пассажирский трап к воздушному судну, воздушное судно должно быть направлено в заранее заданное местоположение остановки в месте стоянки. Как правило, пилот направляется линией заруливания, нанесенной на земле, которая заканчивается в заранее заданном местоположении остановки. Кроме того, поскольку обзор места стоянки или зоны парковки ограничен границами кабины воздушного судна, пилот обычно направляется либо наземным персоналом, либо, как в самые последние годы, системой визуального управления стыковкой с телескопическим трапом (visual docking guidance system) (VDGS).
Система VDGS обычно работает путем испускания световых импульсов, например лазерных импульсов, из местоположения, связанного с местом стоянки, например здания терминала. Световые импульсы обычно испускаются вдоль линии заруливания, при этом приближающееся воздушное судно, следующее по линии заруливания, будет отражать световые импульсы по направлению к детектору. Блок управления в системе VDGS может затем вычислять расстояние до воздушного судна, когда оно приближается к месту остановки. В качестве альтернативы, более сложное сканирование объема в зоне стоянки может быть выполнено путем направления световых импульсов в разных направлениях в зоне остановки таким образом, что различные части приближающегося воздушного судна отражают световые импульсы, при этом может быть не только определено расстояние до воздушного судна, но также может быть идентифицирован и тип воздушного судна путем анализа отражений.
Кроме того, VDGS может содержать дисплей, расположенный, например, на здании терминала в местоположении, где он может быть отчетливо виден пилоту, причем дисплей может обеспечивать навигацию с помощью знаков и/или символов для пилота при маневрировании воздушного судна в направлении места остановки.
Однако диапазон VDGS ограничен по ряду причин. Максимальная мощность световых импульсов должна быть ограничена, чтобы отвечать требованиям безопасности по защите глаз от лучей лазера. Как можно понять, пилот в приближающемся воздушном судне будет непосредственно подвергаться воздействию световых импульсов, что может привести к травмам глаз, если световая энергия будет слишком высокой. То же самое относится к персоналу, работающему на земле в зоне стоянки.
Кроме того, атмосферные условия в зоне стоянки влияют на диапазон VDGS. Атмосфера ослабляет, поглощает и рассеивает световые импульсы, особенно в ситуациях, когда погодные условия включают в себя туман или сильный дождь. Таким образом, эффективный диапазон системы VDGS, снабженной лазером, обычно находится в диапазоне 100-200 м в идеальных условиях.
Важно, чтобы приближающееся воздушное судно было обнаружено как можно раньше, когда оно направляется в парковочное положение (к точке остановки). Это особенно важно с точки зрения безопасности, когда приближающееся воздушное судно должно подойти к месту стоянки таким образом, чтобы минимизировать риск контакта с объектами на земле, а также с трапом или самим зданием терминала. Раннее обнаружение позволяет более совершенным образом направлять пилота, а также позволяет VDGS лучше определять тип и/или модификацию воздушного судна, которое приближается. Последнее особенно важно, поскольку пассажирский трап должен быть правильно выровнен по отношению к воздушному судну, когда оно достигнет точки остановки.
Работа системы VDGS может быть условно разделена на два этапа: этап захвата, когда VDGS сканирует объем, связанный с местом стоянки, для обнаружения/поиска воздушного судна, и этап слежения, когда VDGS обнаружила объект/воздушное судно и стремится определить тип и/или модификацию воздушного судна, а также направить воздушное судно к точке остановки. Во время этапа захвата системе VDGS может потребоваться сканирование большого объема в зависимости от планировки аэропорта и, в частности, в зависимости от расположения мест стоянок, т.е. некоторые места стоянок могут занимать большие площади (обычно это площадь, соответствующая по меньшей мере размеру самого большого воздушного судна, например площадью 80 м на 80 м), причем диапазон VDGS должен быть достаточно большим, чтобы достигать дальнего конца места стоянки. Кроме того, VDGS должна быть в состоянии сканировать большой угол, чтобы захватывать объекты (воздушное судно), приближающиеся сбоку.
Были предприняты попытки обеспечить раннее обнаружение воздушных судов путем расположения системы VDGS дальше в зоне стоянки, вдали от точки остановки, например, на отдельном посту около точки входа в зону стоянки, или на участке пассажирского трапа ближе к точке входа в зону стоянки.
Соответственно, имеется потребность в системе и способе идентификации и направления воздушного судна в место остановки. Кроме того, имеется потребность в такой системе и способе, который обеспечивает надежную работу даже в неблагоприятных условиях окружающей среды, таких как туман, сильный дождь, снег и т.д., и который уменьшает вероятность неправильной идентификации типа воздушного судна, которое будет припарковано.
Сущность изобретения
Ввиду вышеизложенного, целью изобретения является создание системы и способа для оптимизации и, при благоприятных условиях, также повышения эффективной дальности действия системы VDGS без увеличения энергии испускаемых световых импульсов до возможно вредного уровня.
В соответствии с первым аспектом, настоящее изобретение реализуется с помощью системы парковки воздушного судна, имеющей систему верификации и позиционирования на основе света, предпочтительно лазера, выполненную с возможностью сканировать объем, связанный с местом стоянки, и приемный блок, выполненный с возможностью принимать данные наблюдения из системы наблюдения аэропорта, причем система верификации и позиционирования дополнительно выполнена с возможностью управлять размером сканируемого объема на основе принятых данных наблюдения.
Преимущество этого варианта осуществления состоит в том, что система верификации и позиционирования на основе света может сканировать объем, до некоторой степени измененный на основе принятых данных наблюдения. То есть, вместо слепого сканирования объема, связанного с местом стоянки, система верификации и позиционирования на основе света может использовать принятые данные наблюдения для того, чтобы сфокусироваться на сканировании объема, который определяется как представляющий больший интерес. В качестве примера может быть определен объем, представляющий интерес, если данные наблюдения указывают на то, что воздушное судно может присутствовать или скоро будет присутствовать в этом объеме. Таким образом, система верификации и позиционирования на основе света может, на основе данных, предоставляемых системой наблюдения, выполнять очень эффективное сканирование объема, связанного с местом стоянки. Под термином «объем, связанный с местом стоянки» здесь подразумевается объем, который по существу охватывает зону стоянки. Воздушное судно может быть припарковано в границах зоны стоянки. Объем может быть расширен, так что он может охватывать площадь, которая больше, чем место стоянки, предпочтительно в направлении рулежной дорожки аэропорта. Объем может быть разной формы, в зависимости от расположения системы верификации и позиционирования на основе света. Место стоянки может быть расположено перед зданием терминала, так что пассажиры могут входить в припаркованное воздушное судно и/или покидать его. В качестве альтернативы или дополнительно, место стоянки может быть расположено в месте, удаленном от здания терминала. Удаленное место стоянки может использоваться для парковки воздушных судов, которые не работают, или для посадки/высадки пассажиров и/или грузов для дальнейшей транспортировки из зоны удаленного места стоянки в другое местоположение.
Дополнительным преимуществом является то, что путем объединения принятых данных наблюдения с данными, полученными при сканировании объема, связанного с местом стоянки, местоположение воздушного судна может быть определено с высокой точностью в любом месте аэропорта. Кроме того, объединенные датчики системы наблюдения позволяют также получить дополнительные данные о приближающемся воздушном судне, например, уникальный идентификатор воздушного судна. Обычно система наблюдения может определять местоположение воздушного судна на взлетно-посадочной полосе или рулежной дорожке с высокой точностью, но по мере приближения воздушного судна к зоне стоянки, в частности вблизи от зданий терминала, точность данных о местоположении из системы наблюдения ухудшается из-за присутствия, например, зданий или других конструкций, которые мешают датчикам системы наблюдения (т.е. блокируют радиолокационные импульсы, вызывая неправильное считывание из-за отражений и многолучевого распространения радиоволн / двоения и т.д.).
В предпочтительном варианте осуществления, раскрытом ниже, система парковки использует систему верификации и позиционирования на основе лазера. Подчеркнем, что в качестве альтернативы система парковки может быть оборудована радаром или оптическими средствами (например, камерой) для сканирования объема. В первом случае может быть использована радиолокационная антенна, обеспечивающая достаточно узкий радиолокационный луч, так что разрешение сканирования является достаточным для обнаружения и определения положения приближающегося воздушного судна. В последнем случае камера и соответствующее программное обеспечение для распознавания изображений могут использоваться для обнаружения и определения местоположения воздушного судна. В качестве альтернативы лазеру может использоваться видимое или инфракрасное излучение для испускания света, который будет отражаться приближающимся воздушным судном.
Система верификации и позиционирования на основе света может содержать по меньшей мере один лазерный передатчик, выполненный с возможностью испускать свет в разных направлениях в объеме, и детектор, выполненный с возможностью обнаруживать свет, отраженный от объектов в этом объеме.
Преимущество этого варианта осуществления заключается в том, что ограниченное число лазерных передатчиков может использоваться для сканирования всего объема, что делает систему компактной. Даже один передатчик, приспособленный для сканирования азимута и угла места под широким углом, может использоваться для определения местоположения и типа приближающегося воздушного судна. Этот по меньшей мере один передатчик может быть выполнен с возможностью излучать свет в разных направлениях, так что может быть сканирован объем пирамидальной формы (например, в виде тетраэдра или пентаэдра). В качестве альтернативы или дополнительно, два или более лазерных передатчиков могут использоваться совместно и могут быть выполнены с возможностью испускать свет в разных направлениях, так что могут быть сканированы объемы других форм.
Система верификации и позиционирования на основе света может быть выполнена с возможностью уменьшать размер сканируемого объема на основе принятых данных наблюдения.
Преимущество этого варианта осуществления заключается в том, что меньший объем может быть сканирован быстрее. В качестве примера, данные наблюдения могут указывать на то, что воздушное судно может присутствовать или скоро будет присутствовать в субобъеме исходного объема, связанного с местом стоянки, тем самым система может фокусировать сканирование на этом меньшем объеме. Под термином «уменьшить размер» здесь подразумевается, что система может быть выполнена с возможностью уменьшать размер сканируемого объема в любом измерении в зависимости от формы сканируемого объема.
Система верификации и позиционирования на основе света может быть выполнена с возможностью сдвигать сканируемый объем в сторону на основе принятых данных наблюдения.
Преимущество этого варианта осуществления заключается в том, что может сканироваться объем, который на основе принятых данных наблюдения определяется как представляющий интерес. В качестве примера, если данные наблюдения указывают, что воздушное судно присутствует или скоро будет присутствовать в объеме, смещенном в сторону от текущего сканируемого объема, система может сдвинуть сканируемый объем в сторону, чтобы сканировать объем, представляющий интерес. Под термином «в сторону» здесь подразумевается, что система может выполнять поступательное движение объема в любом направлении, или что система может выполнять угловое смещение объема, так что он направляется на новый азимут или угол места.
Система верификации и позиционирования на основе света может быть выполнена с возможностью сканировать объем, лежащий в радиальном направлении от системы верификации и позиционирования на основе лазера, причем система верификации и позиционирования на основе света выполнена с возможностью уменьшать размер сканируемого объема путем ограничения размера объема в радиальном направлении.
Преимущество этого варианта осуществления заключается в том, что система может уменьшать размер сканируемого объема таким образом, что он достигает желаемого расстояния в направлении, например, рулежной дорожки аэропорта. В качестве примера, дальность видимости на месте стоянки может быть ограничена, так чтобы будет уместно уменьшить сканируемый объем в радиальном направлении от системы верификации и позиционирования на основе света. Под термином «радиально» здесь подразумевается, что направление идет радиально от одного лазерного передатчика. В качестве альтернативы или дополнительно, радиальное направление определяется как нормальный вектор, идущий от группы передатчиков, расположенных вдоль линии. В качестве альтернативы или дополнительно, радиальное направление определяется как направление, которое идет радиально от одного лазерного передатчика среди группы передатчиков.
Система верификации и позиционирования на основе света может быть выполнена с возможностью сканировать объем, лежащий в радиальном направлении от системы верификации и позиционирования на основе света, и в направлении, поперечном радиальному направлению, причем система верификации и позиционирования на основе света выполнена с возможностью уменьшать размер сканируемого объема путем ограничения размера объема в поперечном направлении.
Преимущество этого варианта осуществления состоит в том, что объем, меньший в боковом или вертикальном направлении, можно сканировать быстрее. Под термином «поперечный» здесь подразумевается, что система может уменьшать ширину и/или высоту сканируемого объема, как он виден в направлении от системы верификации и позиционирования на основе света. В качестве примера, система может быть выполнена с возможностью уменьшать азимутальную диаграмму направленности, так что ширина сканируемого объема уменьшается. В качестве альтернативы или дополнительно, система может быть выполнена с возможностью уменьшать угломестную диаграмму направленности, так что высота объема уменьшается. В качестве альтернативы или дополнительно, один или более лазерных передатчиков в группе передатчиков могут управляться для уменьшения их мощности передачи, так что поперечный размер объема уменьшается.
Принятые данные наблюдения могут содержать по меньшей мере одно из следующего: идентификационные данные, тип, модификация и местоположение воздушного судна.
Преимущество этого варианта осуществления заключается в том, что система парковки воздушного судна получает предварительное уведомление о воздушном судне, которое приближается к месту стоянки. Идентификационные данные, тип и модификация воздушного судна могут использоваться для определения свойств и внешнего вида воздушного судна, чтобы облегчить верификацию воздушного судна. В качестве альтернативы или дополнительно, идентификационные данные, тип и модификация воздушного судна могут использоваться для запрашивания внешней базы данных о местоположении воздушного судна. Данные о местоположении могут использоваться для управления размером сканируемого объема таким образом, что он направляется в сторону воздушного судна и/или ограничивается субобъемом, в котором воздушное судно находится или ожидается, что скоро будет находиться. В качестве альтернативы или дополнительно, данные о местоположении могут использоваться для запрашивания внешней базы данных об идентификационных данных, типе и/или модификации воздушного судна в полученном местоположении. Данные о местоположении могут использоваться для вычисления скорости и курса воздушного судна.
Принятые данные наблюдения могут содержать информацию о текущих погодных условиях в аэропорту.
Преимущество этого варианта осуществления заключается в том, что система может управлять размером и/или формой сканируемого объема в зависимости от текущих погодных условий в аэропорту. В качестве примера преобладающие погодные условия в аэропорту могут ограничивать визуальный диапазон системы верификации и позиционирования на основе света, например, во время сильного дождя или снега, тумана и т.д. В этой ситуации система может решить уменьшить размер сканируемого объема путем уменьшения дальности действия лазерного передатчика/детектора, поскольку объекты на дальнем расстоянии обнаруживаются только с низкой вероятностью.
Система наблюдения может представлять собой по меньшей мере одно из следующего: радиолокационная станция слежения за наземным перемещением, система ADS-B, режим Mode-S, и система GPS.
Преимущество этого варианта заключается в том, что система парковки воздушного судна может принимать данные от систем, которые уже развернуты в аэропорту. Приемник действует как интерфейс по отношению к этим системам, чтобы облегчить надежное управление размером и/или формой сканируемого объема.
Система верификации и позиционирования на основе света может быть выполнена с возможностью обнаруживать воздушное судно в сканируемом объеме.
Преимущество этого варианта осуществления заключается в том, что система верификации и позиционирования на основе света может работать в состоянии захвата, причем управление расширением сканируемого объема оптимизируется для обнаружения воздушного судна в сканируемом объеме. Сканируемый объем быть расширен по азимуту, углу места и диапазону, чтобы облегчить надежное обнаружение. Расширение сканируемого объема может быть установлено таким образом, чтобы достигнуть максимальной дальности обнаружения воздушного судна, находящегося как можно дальше от парковочной позиции в месте стоянки. Расширение сканируемого объема может быть установлено таким образом, чтобы можно было сканировать максимально широкий объем, если принятые данные наблюдения указывают на неопределенное местоположение воздушного судна. Размер сканируемого объема может быть установлен таким образом, чтобы сканировать узкий объем (по азимуту и/или углу места), если принятые данные наблюдения указывают с высокой достоверностью местоположение воздушного судна.
Система верификации и позиционирования на основе света может быть выполнена с возможностью верифицировать воздушное судно в сканируемом объеме.
Преимущество этого варианта осуществления заключается в том, что, как только воздушное судно будет обнаружено в объеме, система может управлять размером этого объема, чтобы облегчить надежную верификацию воздушного судна. Размер сканируемого объема может быть установлен таким образом, чтобы сканировать узкий объем (по азимуту и/или углу места), чтобы обеспечить считывание (сканирование) объекта, обнаруженного в объеме, с высоким разрешением. На основании принятых данных наблюдения система может управлять размером объема так, что сканируются определенные части обнаруженного воздушного судна, чтобы выявить отличительные признаки воздушного судна. Принятые данные наблюдения могут содержать информацию о типе и/или модификации воздушного судна, при этом система может запрашивать внутреннюю или внешнюю базу данных, чтобы определить относительное положение отличительных признаков (например, двигателей) на воздушном судне и дополнительно управлять размером объема, т.е. фокусируясь на отличительных признаках, чтобы облегчить верификацию типа и/или модификации воздушного судна.
Блок обработки может быть выполнен с возможностью управлять системой верификации и позиционирования на основе света, чтобы верифицировать по меньшей мере одно из идентификационных данных, типа и модификации воздушного судна.
Преимущество этого варианта осуществления заключается в том, что система парковки воздушного судна или любой другой объект, функционально соединенный с системой парковки воздушного судна, могут предпринять действие на основе верификации. Система парковки воздушного судна может указывать пилоту воздушного судна остановить воздушное судно, если верификация завершилась неудачей. Система парковки воздушного судна может инициировать новое сканирование контролируемого объема, если верификация завершилась неудачей.
Блок обработки выполнен с возможностью извлекать тип и/или модификацию воздушного судна из базы данных на основе упомянутых идентификационных данных.
Преимущество этого варианта осуществления заключается в том, что облегчается обслуживание системы. База данных может быть внутренней или внешней по отношению к системе. Внутренняя база данных может обновляться периодически или время от времени посредством подключения к системе базы данных аэропорта. Система может запрашивать внешнюю базу данных по мере необходимости. Внешняя база данных может находиться под контролем органа управления аэропортом, тем самым повышается надежность хранимых в ней данных.
Система парковки воздушного судна может содержать интерфейс, выполненный с возможностью предоставлять данные о воздушном судне в систему наблюдения. Интерфейс может быть выполнен с возможностью предоставлять данные о воздушном судне в систему наблюдения посредством базы данных.
Преимущество этого варианта осуществления заключается в том, что при предоставлении системе наблюдения данных о воздушном судне из системы парковки, местоположение воздушного судна может быть известно системе наблюдения с высокой точностью в любом месте в аэропорту. Обычно система наблюдения может с высокой точностью определять местоположение воздушного судна на взлетно-посадочной полосе или рулежной дорожке, но по мере приближения воздушного судна к зоне стоянки, в частности вблизи от зданий терминала, точность данных о местоположении из системы наблюдения снижается из-за присутствия, например, зданий или других конструкций, которые мешают датчикам системы наблюдения (т.е. блокируют радиолокационные импульсы, вызывая неправильные показания из-за отражений и многолучевого распространения радиоволн / ореолов и т.д.). Поскольку система наблюдения в соответствии с этим вариантом осуществления принимает данные о воздушном судне, принятые системой парковки в зоне стоянки, вышеупомянутые проблемы устраняются.
Система парковки воздушного судна может предоставлять данные о воздушном судне, которые содержат по меньшей мере одно из следующего: верифицированные идентификационные данные, тип, модификация и местоположение воздушного судна.
Преимущество этого варианта осуществления заключается в том, что система наблюдения может получать очень подробные данные о воздушном судне в зоне стоянки, что повышает безопасность в аэропорту и, в частности, в зоне стоянки.
Другие цели, признаки и преимущества настоящего изобретения будут понятны из последующего подробного описания, из прилагаемой формулы изобретения, а также из чертежей.
В целом все термины, используемые в формуле изобретения, должны интерпретироваться в соответствии с их обычным значением в данной области техники, если явно не указано иное. Все ссылки на один элемент, устройство, компонент, средство, шаг и т.д. должны интерпретироваться в открытом смысле как ссылка на по меньшей мере один пример упомянутого элемента, устройства, компонента, средства, шага и т.д., если явно не указано иное. Шаги любого способа, раскрытого в настоящем документе, не должны выполняться в точном раскрытом порядке, если явно не указано иное.
Краткое описание чертежей
Вышеупомянутые, а также дополнительные цели, признаки и преимущества настоящего изобретения будут более понятны из последующего иллюстративного и неограничивающего подробного описания предпочтительных вариантов настоящего изобретения со ссылкой на прилагаемые чертежи, где одни и те же номера позиций используются для аналогичных элементов, причем:
Фиг. 1а и 1b представляют схематические изображения системы 100 парковки воздушного судна в соответствии с первым вариантом настоящего изобретения;
Фиг. 2 схематически показывает систему парковки в соответствии со вторым вариантом осуществления настоящего изобретения;
Фиг. 3 схематически показывает систему парковки в соответствии с третьим вариантом осуществления настоящего изобретения;
Фиг. 4 схематически показывает систему парковки в соответствии с четвертым вариантом осуществления настоящего изобретения
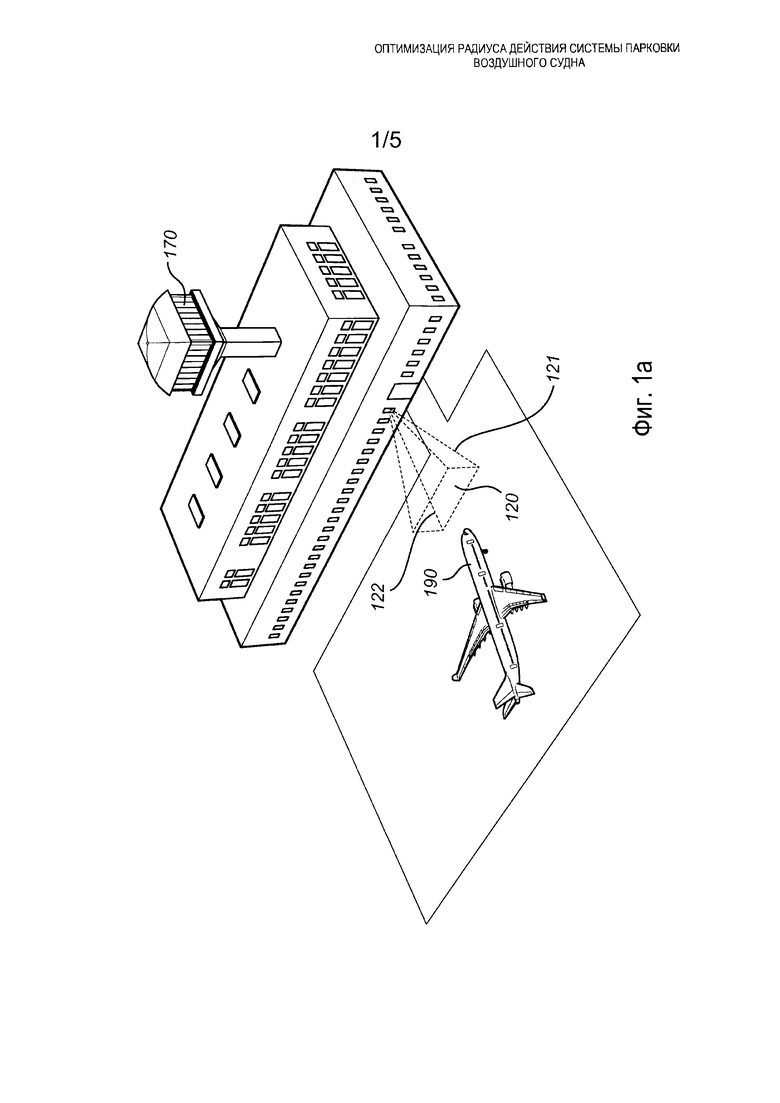
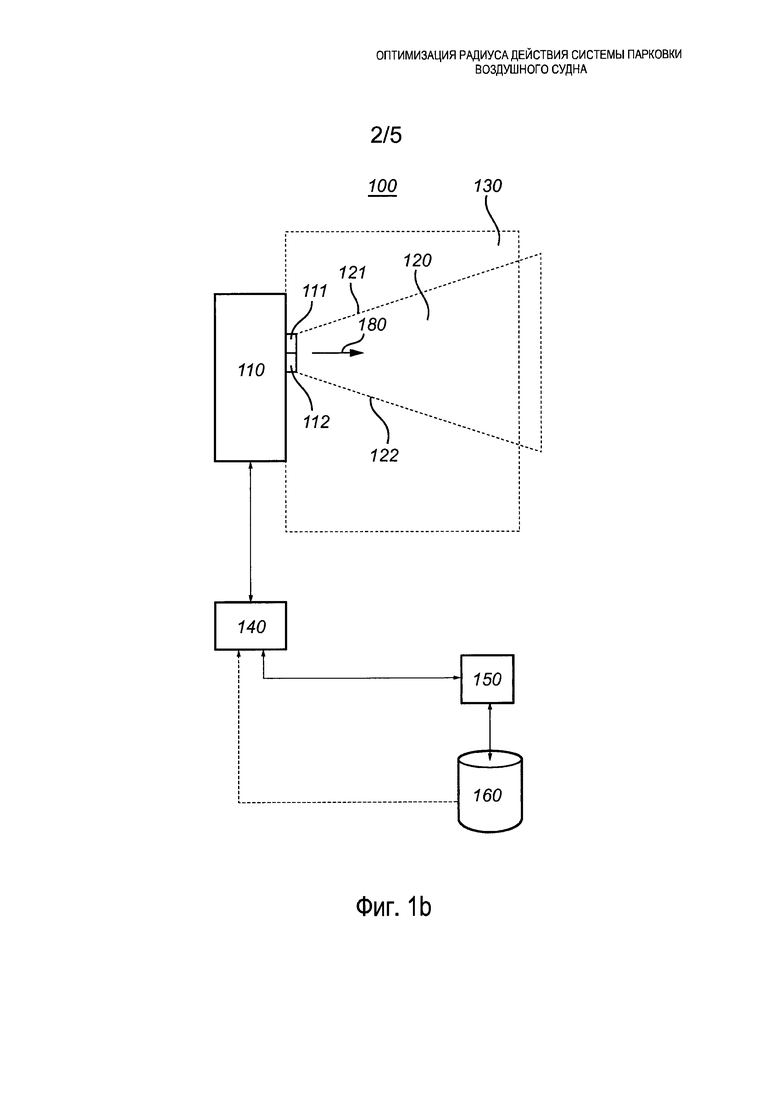
Подробное описание предпочтительных вариантов осуществления Фиг. 1а и 1b представляют схематическое изображение системы 100 парковки воздушного судна в соответствии с первым вариантом осуществления настоящего изобретения. Система 100 парковки содержит систему 110 верификации и позиционирования на основе лазера, которая выполнена с возможностью сканировать объем 120 или часть объема, связанного с местом стоянки, такого как вертикальный или горизонтальный сектор, как будет описано более подробно ниже, с привязкой к месту 130 стоянки. На фиг. 1 двумерная проекция объема 120 обозначена пунктирными линиями 121, 122. Как упоминалось ранее, в нижеследующем описании предпочтительных вариантов осуществления будет раскрыта система с использованием лазерного передатчика в качестве источника света для системы 110 верификации и позиционирования на основе света. Однако, в качестве альтернативы, система парковки может быть оборудована радаром, устройством с фокусированным пучко света или другим оптическим устройством (например, камерой) для сканирования объема.
Система 110 верификации и позиционирования на основе лазера содержит по меньшей мере один лазерный передатчик 111, выполненный с возможностью испускать лазерные импульсы в разных направлениях в объеме 120. В качестве примера, снабдив лазерный передатчик 111 двумя зеркалами (не показаны), можно нацеливать лазер с помощью отражения лазерных импульсов в наружном направлении над зоной стоянки. Одно зеркало управляет горизонтальным углом лазера, а другое зеркало управляет вертикальным углом. Каждое зеркало управляется соответствующим шаговым двигателем, который, в свою очередь, управляется процессором (не показан), чтобы выполнять сканирование в соответствии с определенным паттерном (т.е. направляя лазерный импульс в разных направлениях). Детектор 112 обнаруживает лазерные импульсы, которые были отражены объектами в пределах дальности действия лазерного передатчика 111.
В соответствии с настоящим вариантом осуществления, система 110 управляет горизонтальным зеркалом для достижения непрерывного горизонтального сканирования в пределах заранее заданного угла (например, +/-10 градусов) фиксированными шагами (например, с угловыми шагами 0,1 градуса). Один угловой шаг берется для каждого ответа от детектора 112. Лазерные импульсы излучаются с заранее заданной частотой (например, 400 Гц), что обеспечивает новое считывание из детектора 112 каждые 2,5 мс. Аналогичным образом вертикальное зеркало может управляться для получения вертикального сканирования в пределах заранее заданного угла (например, между +20 и -30 градусами) с фиксированными шагами (например, с угловыми шагами 0,1 градус), с одним шагом каждые 2,5 мс.
Более подробное описание процедуры сканирования может быть найдено, например, в патенте US 6,563,432 настоящего заявителя.
Другими словами, со ссылкой на фиг. 1b, лазерный передатчик 111 выполнен с возможностью сканировать объем 120 в горизонтальном направлении от одной конечной точки, где луч света следует пунктирной линии 121, до другой конечной точки, где луч света следует пунктирной линии 122. Для каждого шага в горизонтальном направлении лазерный передатчик 111 выполнен с возможностью сканировать объем 120 в вертикальном направлении от одной конечной точки, например+20 градусов относительно земной поверхности, до другой конечной точки, например -30 градусов относительно земной поверхности. Согласно этой процедуре сканируется объем 120 пирамидальной формы с одной вершиной на лазерном передатчике 111. В альтернативном варианте осуществления зеркала могут управляться для сканирования объема другой формы, например конической формы.
В альтернативном варианте осуществления два или более лазерных передатчиков 111 могут использоваться совместно и могут быть выполнены с возможностью излучать свет в разных направлениях, так что могут сканироваться объемы других форм, например прямоугольной. То есть, в качестве примера, при позиционировании четырех лазерных передатчиков 111 и детекторов 112 на расстоянии нескольких метров друг от друга в прямоугольной конфигурации на здании терминала, связанном с местом стоянки, и при объединении вклада от каждого передатчика/детектора, большая часть зоны стоянки (особенно края зоны стоянки ближе к зданию терминала) может быть эффективно сканирована.
Система 100 парковки воздушного судна также содержит приемный блок 140, выполненный с возможностью принимать данные наблюдения из системы 150 наблюдения аэропорта. Система 150 наблюдения аэропорта может быть удаленной от системы 100 парковки воздушного судна и распределенной между множеством объектов в аэропорту. Как правило, система наблюдения наблюдает и отслеживает воздушное судно 190 в воздухе и на земле (взлетно-посадочные полосы и рулежные дорожки) и обеспечивает поддержку ситуационной осведомленности для диспетчерской вышки 170 в аэропорту. Система 150 наблюдения может также отслеживать любой другой объект, например, грузовые автомобили или тягачи-буксировщики в аэропорту. Система 150 наблюдения может также предоставлять данные в центральную базу 160 данных для дальнейшего использования на дисплеях в аэропорту, тем самым, например, предоставляя информацию о прибывающем воздушном судне 190 персоналу аэропорта. В частности, система 100 парковки может извлекать тип/или модификацию воздушного судна из системы 150 наблюдения и/или центральной базы 160 данных на основе идентификационных данных.
Система 150 наблюдения может основываться на системах диспетчерской радиолокационной станции слежения за наземным перемещением, цифровой обзорной радиолокационной станции аэропорта (Digital Airport Surveillance Radar) (DASR), системе автоматического зависимого наблюдения - вещания (Automatic Dependent Surveillance - Broadcast) (ADS-B) в режиме Select (Выбор) (Mode-S) и/или системе GPS (глобального позиционирования). Система 150 наблюдения может периодически передавать данные наблюдения в одну или более систем парковки в аэропорту. В качестве альтернативы или дополнительно конкретная система парковки может запрашивать данные наблюдения из системы 150 наблюдения по мере необходимости. Система 150 наблюдения может содержать вышеупомянутую базу 160 данных, причем данные наблюдения направляются из базы 160 данных в систему (-ы) 100 парковки по запросу или посредством широковещательной передачи. В качестве альтернативы или в дополнение к отправке данных наблюдения из базы 160 данных, система 150 наблюдения может передавать данные наблюдения получателям (например, в систему (-ы) 100 парковки). Этот вариант осуществления является полезным, если соединение с базой 160 данных временно недоступно или в случае, когда база 160 данных не используется для предоставления данных наблюдения в системе. Принятые данные наблюдения содержат идентификационные данные, тип, модификацию и/или местоположение воздушного судна 190, контролируемого системой 150 наблюдения.
В соответствии с одним вариантом осуществления, система 150 наблюдения предоставляет данные наблюдения, содержащие информацию о текущих погодных условиях в аэропорту. Информация о погоде может использоваться системой 100 парковки для определения эффективного радиуса действия системы 110 верификации и позиционирования на основе лазера. То есть, если представленные данные о погоде указывают, что видимость в аэропорту резко снижается, например, из-за тумана или сильного дождя, система 110 верификации и позиционирования на основе лазера будет знать, что эффективная дальность действия лазера (или другого сфокусированного светового луча) будет уменьшена, так что воздушное судно 190 на большем расстоянии будет трудно или даже невозможно обнаружить. Система 100 парковки в такой ситуации может решить увеличить мощность лазера, если он еще не работает с максимально допустимой мощностью, и/или система 100 установка на место стоянки может предупредить пилота или персонал на месте стоянки, что надежное обнаружение и отслеживание воздушного судна 190 невозможно. Система парковки может принять решение использовать данные о воздушном судне (идентификационные данные, тип, модификация, местоположение), присутствующие в данных наблюдения, для отслеживания воздушного судна 190 до тех пор, пока не станет возможным надежное обнаружение с помощью системы 110 верификации и позиционирования на основе лазера.
Поскольку данные наблюдения предоставляют информацию о местоположении приближающегося воздушного судна, система парковки может лучше интерпретировать данные, предоставленные системой 110 верификации и позиционирования на основе лазера. То есть, данные сканирования, представленные системой 110 верификации и позиционирования на основе лазера при сканировании объема, который обычно отбрасывается как ненадежный из-за уменьшенной видимости в зоне стоянки (т.е. отражения от воздушного судна очень близки к уровню шума в сигнале данных), могут интерпретироваться с использованием данных наблюдения, при этом, например, воздушное судно может быть обнаружено в сигнале, поскольку система парковки «знает», где искать и что искать.
Система 110 верификации и позиционирования на основе лазера выполнена с возможностью управлять изменением сканируемого объема 120 на основе принятых данных наблюдения. В первом примере, со ссылкой на вышеописанную ситуацию с уменьшенной видимостью, система 110 верификации и позиционирования на основе лазера выполнена с возможностью сканировать объем, находящийся в направлении 180, радиальном от местоположения системы 110 верификации и позиционирования на основе лазера, как указано стрелкой 180 на фиг. lb, причем система 110 верификации и позиционирования на основе лазера выполнена с возможностью уменьшать размер сканируемого объема путем ограничения этого объема в радиальном направлении 180. Это можно сделать, например, принимая только отраженные световые импульсы, которые имеют время пролета ниже определенного порога. То есть, если система 110 верификации и позиционирования на основе лазера использует время пролета в качестве способа измерения оптического расстояния, отраженные импульсы возвращаются к детектору через t=2*D/c секунд, где с - скорость света, a D - расстояние от передатчика 111 до отражающего объекта (т.е. воздушного судна 190). При приеме отраженных импульсов в течение временного окна, например, 333,5 не, будут обнаружены объекты на расстоянии до 50 м в радиальном направлении. Световые импульсы, поступающие в более позднее время (возможно, отраженные от объекта, находящегося дальше в радиальном направлении), отвергаются как ненадежные.
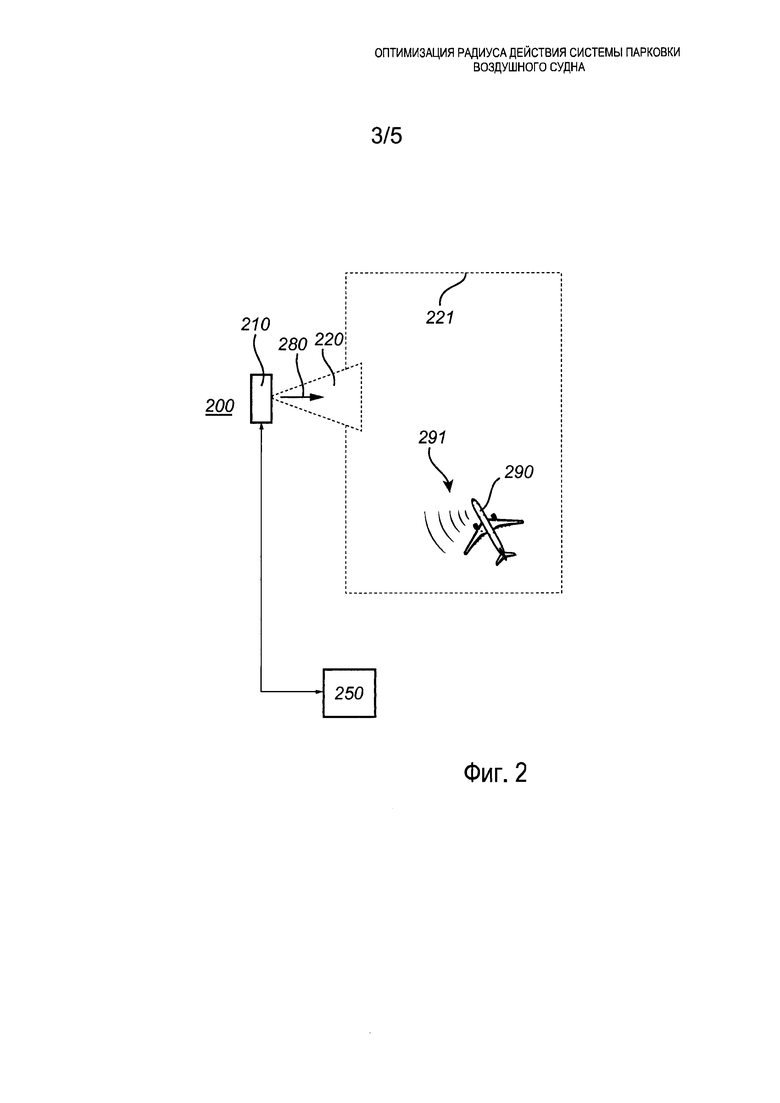
Во втором примере, со ссылкой на фиг. 2, система 210 верификации и позиционирования на основе лазера выполнена с возможностью сканировать объем, находящийся в направлении 280, радиальном от местоположения системы 210 верификации и позиционирования на основе лазера, как указано стрелкой 280 на фиг. 2, причем полученная информация наблюдения предоставляет информацию (например, идентификацию и местоположение) о воздушном судне 290 и других объектах вне сканированного объема 220 (т.е. вне эффективного радиуса действия системы 210 верификации и позиционирования на основе лазера). В частности, с точки зрения системы 200 парковки, данные о местоположении, предоставленные в данных наблюдения, эквивалентны данным о местоположении, предоставленным системой 210 верификации и позиционирования на основе лазера, в том смысле, что они сообщают системе парковки, где располагается объект. Благодаря этому условию расширяется эффективный радиус действия системы 200 парковки, т.е. диапазон расстояний, в котором система 200 парковки может обнаруживать и отслеживать воздушное судно.
Воздушное судно 290 обнаруживается и отслеживается системой 250 наблюдения, например, с помощью трансляций ADS-B 291. Таким образом, данные о местоположении и идентификации, относящиеся к воздушному судну 290, известны системе 250 наблюдения. Предоставляя эту информацию системе 200 парковки и объединяя ее с данными позиционирования и обнаружения, предоставляемыми системой 210 верификации и позиционирования на основе лазера, эффективный диапазон системы 210 верификации и позиционирования на основе лазера искусственно расширяют для охвата диапазона дальностей, покрываемого системой 250 наблюдения, как показано пунктирной линией 221 на фиг. 2. Понятно, что эта зона/объем, охваченный системой 250 наблюдения, может быть значительно больше, чем зона/объем, охваченный системой 210 верификации и позиционирования на основе лазера. Таким образом, с точки зрения системы 200 парковки, эффективная дальность действия системы 210 верификации и позиционирования на основе лазера значительно увеличивается.
Кроме того, если данные наблюдения указывают, что никакие другие объекты не находятся на пути между системой 210 верификации и позиционирования на основе лазера и воздушным судном 290, система 210 верификации и позиционирования на основе лазера может увеличить мощность передачи лазера, чтобы расширить фактический радиус действия системы 210 верификации и позиционирования на основе лазера. Однако следует проявлять осторожность, чтобы мощность передачи лазера не увеличивалась до уровней, которые могут быть вредными для любого персонала, присутствующего в зоне между системой 210 верификации и позиционирования на основе лазера и воздушным судном. В качестве альтернативы, правила могут предписывать, что персонал не может входить в зону между системой 210 верификации и позиционирования на основе лазера и воздушным судном 290 на ранних этапах приближения (когда воздушное судно находится далеко и, следовательно, мощность передачи увеличена). Затем мощность передачи лазера может быть уменьшена по мере приближения воздушного судна к зоне стоянки.
В альтернативном варианте осуществления, система 200 парковки предоставляет данные сканирования (например, местоположение и тип воздушного судна), принятые от системы 210 верификации и позиционирования на основе лазера, в систему 250 наблюдения. Как упоминалось ранее, система наблюдения обычно может определять местоположение воздушного судна на взлетно-посадочной полосе или рулежной дорожке с высокой точностью, но по мере приближения воздушного судна к зоне стоянки, в частности вблизи от зданий терминала, точность данных о местоположении из системы наблюдения ухудшается из-за наличия, например, зданий или других конструкций, которые мешают датчикам системы наблюдения (т.е. блокируют радиолокационные импульсы, вызывая неправильное считывание из-за отражений и т.д.). При предоставлении данных сканирования из системы 210 парковки в систему 250 наблюдения, система 250 наблюдения будет иметь возможность отслеживать воздушное судно с высокой точностью также в зоне стоянки, даже если другие датчики, являющиеся частью системы 250 наблюдения, не предоставляют надежные данные.
Как раскрыто выше, размер сканируемого объема может быть уменьшен в радиальном направлении. Со ссылкой на фиг. 3, система 310 верификации и позиционирования на основе лазера может быть выполнена с возможностью сканировать объем 320, находящийся в направлении, радиальном от системы 320 верификации и позиционирования на основе лазера, и в направлении, поперечном радиальному направлению, причем система 310 верификации и позиционирования на основе лазера выполнена с возможностью уменьшать размер сканируемого объема 320 путем ограничения этого объема 320 в поперечном направлении.
Воздушное судно 390 обнаруживается и отслеживается системой 350 наблюдения, например, с помощью трансляций ADS-B 391. Таким образом, данные о местоположении и идентификации, относящиеся к воздушному судну 390, известны системе 350 наблюдения. При предоставлении этой информации системе 300 парковки система 300 парковки знает, где ожидать воздушное судно 390 еще до того, как воздушное судно 390 входит в эффективный диапазон системы 310 верификации и позиционирования на основе лазера (т.е. вне сканируемого объема 320). Кроме того, поскольку данные наблюдения могут содержать идентификационные данные, относящиеся к воздушному судну 390, система 300 парковки не только знает, где искать воздушное судно 390, но также знает тип воздушного судна 390, который нужно искать. Следовательно, системе 310 верификации и позиционирования на основе лазера не нужно вслепую сканировать весь объем при поиске воздушного судна 390.
Используя данные о местоположении воздушного судна, система 310 верификации и позиционирования на основе лазера может уменьшать размер сканируемого объема 320, управляя зеркалами в лазерном передатчике 311 таким образом, что конечные точки 321 и 322 перемещаются внутрь, как показано стрелками 321а и 322а на фиг. 3, так что сканируется меньший объем 323. При ограничении размера сканируемого объема 323, система парковки может выбрать увеличение разрешения сканирования, т.е. уменьшить размер углового шага зеркал путем уменьшения размера шага шаговых двигателей. В качестве альтернативы, размер углового шага может быть неизменным, при этом время сканирования ограниченного объема будет уменьшено из-за меньшего количества горизонтальных шагов на цикл сканирования. В качестве еще одной альтернативы может быть реализована комбинация обоих предыдущих вариантов осуществления, т.е. система 310 верификации и позиционирования на основе лазера может уменьшить количество шагов и уменьшить размер углового шага, так что достигается подходящий компромисс между разрешением и скоростью сканирования.
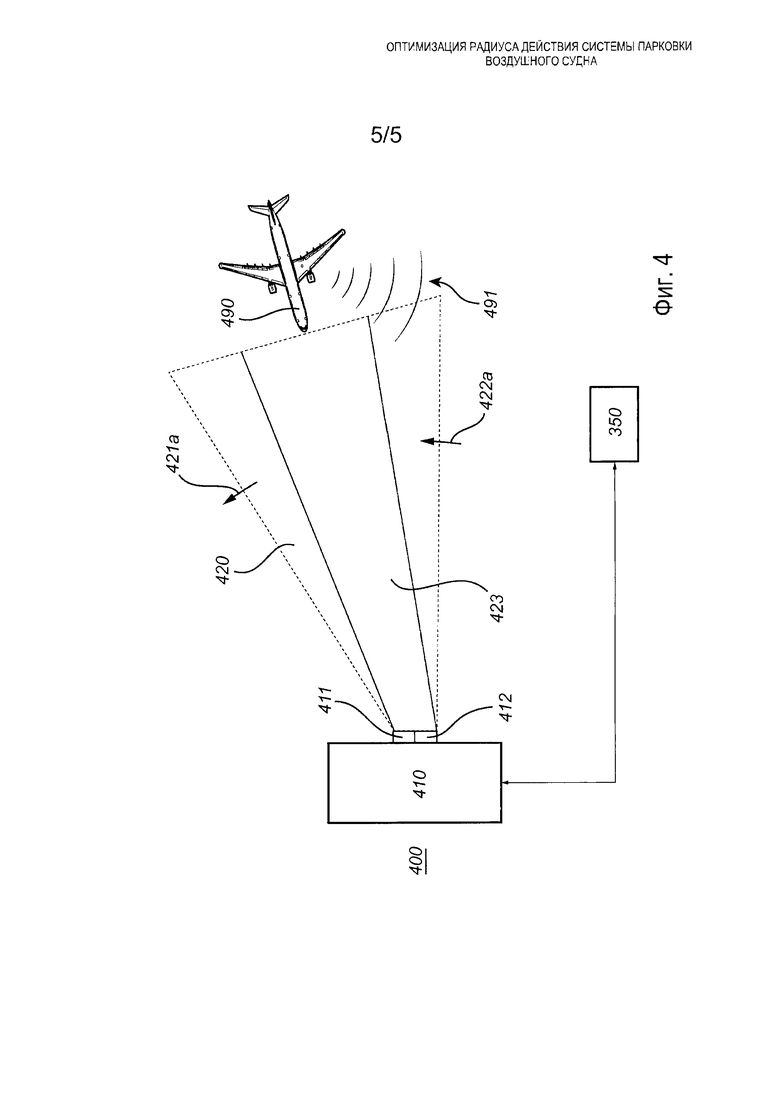
Как показано на фиг. 4, система 410 верификации и позиционирования на основе лазера может быть выполнена с возможностью сдвигать сканируемый объем 420 в сторону на основе принятых данных наблюдения.
Воздушное судно 490 обнаруживается и отслеживается системой 450 наблюдения, например, с помощью трансляций ADS-B 391. Таким образом, данные о местоположении и идентификации, относящиеся к воздушному судну 490, известны системе 450 наблюдения. При предоставлении этой информации системе 400 парковки, система 400 парковки знает, где ожидать воздушное судно 490, еще до того, как воздушное судно 490 входит в эффективный диапазон обнаружения системы 410 верификации и позиционирования на основе лазера (т.е. вне сканируемого объема 420). Кроме того, поскольку данные наблюдения могут содержать идентификационные данные, относящиеся к воздушному судну 490, система 400 парковки не только знает, где искать воздушное судно 490, но также знает тип воздушного судна 490, который нужно искать.
Используя знание о местоположении воздушного судна, система 410 верификации и позиционирования на основе лазера может сдвигать весь сканированный объем 420 в сторону, управляя зеркалами в лазерном передатчике 411 таким образом, что горизонтальные конечные точки 421 и 422 перемещаются в сторону, как указано стрелками 421а и 422а на фиг. 4, так что размер сканируемого объема 420 не изменяется, а изменяется угловая ориентация сканируемого объема 420. То есть, не ограничивая поперечную/угловую ширину сканируемого объема 420, система 410 верификации и позиционирования на основе лазера может более надежно обнаруживать воздушное судно 490 путем сканирования того объема 420, где ожидается воздушное судно 490. Кроме того, как подробно описано выше, поперечное перемещение сканируемого объема 420 может быть объединено с ограничением сканируемого объема 420, так что сканируется меньший объем 423.
Изобретение описано выше в основном со ссылкой на некоторые варианты его осуществления. Однако, как легко понять специалисту в данной области техники, другие варианты осуществления, кроме раскрытых выше, также возможны в рамках объема изобретения, определенного прилагаемой формулой изобретения.

Система парковки воздушного судна содержит систему верификации и позиционирования на основе света, выполненную с возможностью сканировать объем, связанный с местом стоянки, а также управлять его размером, приемный блок для приема данных наблюдения из системы наблюдения аэропорта. Обеспечивается надежность верификации воздушного судна и направление его в зону стоянки. 12 з.п. ф-лы, 5 ил.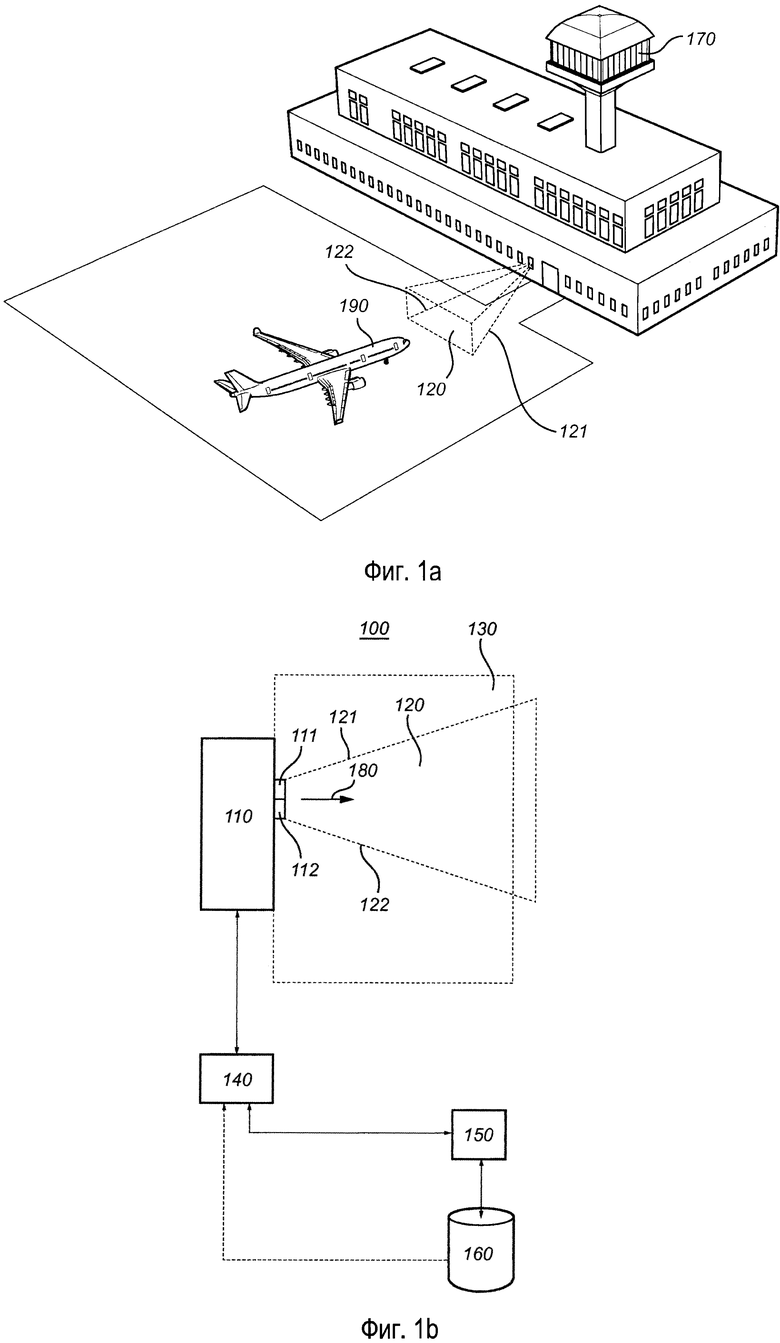
1. Система (100, 200, 300, 400) парковки воздушного судна, содержащая систему (110, 210, 310, 410) верификации и позиционирования на основе света,
выполненную с возможностью контролировать воздушное судно (190, 290, 390, 490), прибытие которого на место стоянки ожидается, в объеме (120, 220; 221, 320, 420), связанном с местом стоянки, причем контроль включает в себя обнаружение и отслеживание воздушного судна (190, 290, 390, 490), и контролируемый объем (120, 220; 221, 320, 420) содержит по меньшей мере сканируемый объем (120, 220, 320, 420), который сканируется системой (110, 210, 310, 410) верификации и позиционирования на основе света,
при этом система (100, 200, 300, 400) парковки воздушного судна также содержит
приемный блок (140), выполненный с возможностью принимать данные наблюдения, относящиеся к воздушному судну (190, 290, 390, 490), из системы (150, 250, 350, 450) наблюдения аэропорта,
отличающаяся тем, что принимаемые данные наблюдения включают данные о местоположении, относящиеся к воздушному судну (190, 290, 390, 490), а система (110, 210, 310, 410) верификации и позиционирования на основе света дополнительно выполнена с возможностью:
управлять размером сканируемого объема (120, 220, 221, 320, 420) на основе принятых данных о местоположении,
уменьшать размер сканируемого объема (420) на основе принятых данных наблюдения, и
сдвигать по меньшей мере часть сканируемого объема (420) в сторону на основе принятых данных наблюдения.
2. Система (100, 200, 300, 400) по п. 1, в которой система (110, 210, 310, 410) верификации и позиционирования на основе света содержит по меньшей мере один лазерный передатчик (111, 211, 311, 411), выполненный с возможностью излучать свет в разных направлениях в сканируемом объеме (120, 220, 320, 420), и детектор, выполненный с возможностью обнаруживать свет, отраженный от объектов в сканируемом объеме (120, 220, 320, 420).
3. Система (300) по любому предшествующему пункту, в которой система (310) верификации и позиционирования на основе света выполнена с возможностью сканировать объем (320), лежащий в радиальном направлении от системы (310) верификации и позиционирования на основе света, при этом система (310) верификации и позиционирования на основе света выполнена с возможностью уменьшать размер сканируемого объема (320) путем ограничения размера этого объема (320) в радиальном направлении.
4. Система (300) по любому предшествующему пункту, в которой система (310) верификации и позиционирования на основе света выполнена с возможностью сканировать объем (320), лежащий в радиальном направлении от системы верификации и позиционирования на основе света, и в направлении, поперечном радиальному направлению, при этом система (310) верификации и позиционирования на основе света выполнена с возможностью уменьшать размер сканируемого объема (320) путем ограничения размера этого объема (320) в поперечном направлении.
5. Система (100, 200, 300, 400) по любому из предшествующих пунктов, в которой принятые данные наблюдения содержат по меньшей мере одно из следующего: идентификационные данные, тип и модификацию воздушного судна.
6. Система (100, 200, 300, 400) по любому из предшествующих пунктов, в которой принятые данные наблюдения содержат информацию о текущих погодных условиях в аэропорту.
7. Система (100, 200, 300, 400) по любому из предшествующих пунктов, в которой система наблюдения представляет собой по меньшей мере одно из следующего: радиолокационная станция слежения за наземным перемещением, система ADS-B, режим Mode-S и система GPS.
8. Система (100, 200, 300, 400) по любому из пп. 1-3, в которой система верификации и позиционирования на основе света выполнена с возможностью верифицировать воздушное судно (190, 290, 390, 490) в сканируемом объеме.
9. Система (100, 200, 300, 400) по любому из предшествующих пунктов, в которой система верификации и позиционирования на основе света выполнена с возможностью верифицировать по меньшей мере одно из следующего: идентификационные данные, тип и модификацию воздушного судна (190, 290, 390, 490).
10. Система (100, 200, 300, 400) по любому из предшествующих пунктов, в которой система верификации и позиционирования на основе света выполнена с возможностью извлекать тип и/или модификацию воздушного судна (190, 290, 390, 490) из базы данных на основе упомянутых идентификационных данных.
11. Система (100, 200, 300, 400) по любому из предшествующих пунктов, содержащая интерфейс, выполненный с возможностью предоставлять данные о воздушном судне в систему наблюдения.
12. Система (100, 200, 300, 400) по п. 11, содержащая интерфейс, выполненный с возможностью предоставлять данные о воздушном судне в систему наблюдения посредством базы данных.
13. Система (100, 200, 300, 400) по п. 11 или 12, в которой данные о воздушном судне содержат по меньшей мере одно из следующего: верифицированные идентификационные данные, тип, модификация и местоположение воздушного судна.
| ИДЕНТИФИКАЦИЯ САМОЛЕТА И СИСТЕМЫ УПРАВЛЕНИЯ ШВАРТОВКОЙ | 1994 |
|
RU2155384C2 |
| СИСТЕМЫ ОПОЗНАВАНИЯ И НАВЕДЕНИЯ ПРИ ПАРКОВКЕ ВОЗДУШНЫХ СУДОВ | 2000 |
|
RU2268498C2 |
| US 6282488 B1, 28.08.2001 | |||
| US 6563432 B1, 13.05.2003 | |||
| DE 4301637, 11.08.1994. | |||

