Область техники, к которой относится изобретение
Настоящее изобретение относится к стояночному комплексу аэропорта. Более конкретно, изобретение относится к стояночному комплексу аэропорта, выполненному с возможностью содействия пилоту приближающегося воздушного судна в маневрировании воздушным судном к положению парковки на месте стоянки.
Уровень техники
Безопасная и надежная постановка воздушных судов на места стоянки в аэропортах сегодня чаще всего достигается с помощью стояночных комплексов для воздушных судов, таких как системы постановки воздушного судна на место стоянки, размещенные локально на местах стоянки аэропорта, при этом каждая система постановки воздушного судна на место стоянки выполнена с возможностью содействия пилоту, и иногда также и наземной бригаде, в размещении воздушного судна на месте стоянки безопасным и надежным способом. Часто такие стояночные комплексы для воздушных судов содержат средства для установления местоположения воздушного судна по мере его приближения к месту стоянки, причем указанные средства часто являются системой обнаружения с удаленным распознаванием, такой как система лазерного сканирования. В типичном случае стояночные комплексы для воздушных судов, известные в данной области техники, выполнены с возможностью анализа данных о местоположении от воздушного судна и, возможно, также других входных параметров, и, на основе этих параметров, определения руководящей информации по маневрированию для пилота на дисплее стояночных комплексов для воздушных судов для содействия пилоту приближающегося воздушного судна в маневрировании воздушным судном к заданному положению парковки на месте стоянки.
Проблема существующих комплексов заключается в том, что они часто основаны на методах оптического распознавания, которые менее точны или даже неприменимы в погодных условиях с плохой видимостью, таких как, например, дождь, туман или снег. Более того, поскольку по меньшей мере некоторые системы обнаружения с удаленным распознаванием основаны на измерении и интерпретации сигнала обратного рассеяния от воздушного судна, качество сигнала будет зависеть от характеристик поверхности самого воздушного судна. Обычные воздушные суда чаще всего содержат части внешней поверхности из стали, которая обеспечивает эффективное обратное рассеяние. Однако, поскольку в современных воздушных судах все чаще используются неметаллические композитные материалы для снижения веса, обычные системы постановки воздушного судна на место стоянки могут испытывать трудности с обнаружением этих самолетов с достаточной точностью.
Еще одна проблема заключается в том, что иногда трудно обнаружить достаточную поверхность воздушного судна для оценки данных воздушного судна, таких как положение, размеры и тип воздушного судна. Особой задачей в этом отношении является успешное определение и отслеживание угла приближения воздушного судна по отношению к линии въезда на место стоянки. Кроме того, пространственное разрешение может быть недостаточным для успешного определения типа воздушного судна.
Таким образом, в данной области техники существует потребность в улучшении стояночных комплексов для воздушных судов.
Сущность изобретения
Задачей изобретения является смягчение, уменьшение или устранение одного или более из вышеуказанных недостатков уровня техники и недостатков по отдельности или в любой комбинации и решение по меньшей мере вышеуказанной проблемы. Согласно первому аспекту, предлагается стояночный комплекс аэропорта, содержащий:
дисплей;
радиолокационную систему; и
одну или более дополнительных систем, выбранных из лазерных систем и систем формирования изображения,
причем указанная радиолокационная система и указанные одна или более дополнительных систем вместе образуют объединенную систему,
причем стояночный комплекс аэропорта выполнен с возможностью, на основе выходных данных от указанной объединенной системы, обнаружения и отслеживания воздушного судна в пределах зоны стоянки, когда указанное воздушное судно приближается к месту стоянки в пределах зоны стоянки для парковки в положении парковки, и выполнен с возможностью, на основе указанного обнаружения и отслеживания приближающегося воздушного судна, предоставления руководящей информации по маневрированию для пилота на указанном дисплее для содействия пилоту приближающегося воздушного судна в маневрировании воздушным судном в направлении указанного положения парковки.
Стояночный комплекс аэропорта может быть выгодным, поскольку он позволяет комбинировать более одного метода удаленного распознавания для обнаружения и отслеживания воздушного судна. Поскольку каждый метод удаленного распознавания имеет свои характерные сильные и слабые стороны, предлагаемый стояночный комплекс аэропорта может быть более универсальным в различных ситуациях. В частности, он предоставляет средства для решения проблем систем предшествующего уровня техники. Например, радиолокационная система обеспечивает повышенную чувствительность в условиях плохой видимости. Более того, радиолокационная система более чувствительна к композитным материалам современных воздушных судов, поскольку обратное рассеяние радиолокационного сигнала от этих материалов достаточно велико, чтобы обеспечить хорошее отношение сигнал / шум. Системы формирования изображения обеспечивают улучшенное пространственное разрешение в хорошую погоду. Системы формирования изображения также обычно обеспечивают более высокую частоту повторения более быстрых объектов и менее дороги. Как будет показано ниже, дополнительное преимущество стояночного комплекса аэропорта состоит в том, что он позволяет точно обнаруживать и отслеживать другие объекты, присутствующие в зоне стоянки.
Стояночный комплекс аэропорта может состоять из нескольких соединенных между собой модулей, при этом каждый модуль может располагаться в разных местах в зоне выхода на посадку или вокруг нее. Однако стояночный комплекс аэропорта расположен в зоне стоянки и не предназначен для обнаружения и отслеживания воздушных судов в других частях аэропорта, таких как, например, рулежные дорожки или взлетно-посадочные полосы. Стояночный комплекс аэропорта может представлять собой систему постановки воздушного судна на место стоянки.
Радиолокационная система представляет собой систему обнаружения с удаленным распознаванием, основанную на микроволновом электромагнитном излучении. Такие системы излучают непрерывные или импульсные радиолокационные сигналы в направлении цели, а также улавливают и обнаруживают радиолокационные импульсы, обратно рассеянные от цели. Радиолокационная система может содержать радиолокационный датчик полупроводникового типа. Например, радиолокационный датчик может представлять собой датчик, используемый в автомобильной промышленности. Радиолокационный датчик может работать на частоте 77 ГГц.
Лазерная система представляет собой систему обнаружения с удаленным распознаванием, основанную на оптическом электромагнитном излучении. Такие системы излучают непрерывное или импульсное лазерное излучение в направлении цели, а также улавливают и обнаруживают лазерное излучение, обратно рассеянное от цели. Лазерная система может содержать средства отклонения луча для обеспечения функций сканирования. Такие средства отклонения луча могут представлять собой, например, систему сканирующего зеркала.
Система формирования изображения может содержать камеру, чувствительную к оптическому или инфракрасному излучению. Система формирования изображения может использоваться для захвата испускаемого естественного излучения от цели. Однако также возможно, что камера используется для захвата излучения, испускаемого мишенью в ответ на луч от лазерной системы. Такое излучение может быть рассеянным или отраженным лазерным излучением, флуоресценцией, фосфоресценцией и т.п.
Согласно некоторым вариантам осуществления, указанные одна или более дополнительных систем выбираются только из лазерных систем.
Согласно некоторым вариантам осуществления, указанные одна или более дополнительных систем выбираются только из систем формирования изображения.
Согласно некоторым вариантам осуществления, указанные одна или более дополнительных систем содержат по меньшей мере одну лазерную систему и по меньшей мере одну систему формирования изображения.
Стояночный комплекс аэропорта дополнительно содержит средства управления для управления и выполнения указанного обнаружения и отслеживания. Средства управления могут содержать отдельный блок управления стояночного комплекса аэропорта, но альтернативно может содержать несколько блоков управления. Например, каждая система объединенной системы может содержать соответствующий блок управления. Специалист легко поймет, что многие физические варианты осуществления существуют в пределах объема формулы изобретения.
Каждая система объединенной системы обеспечивает соответствующий охват в зоне стоянки. Предпочтительно соответствующие охваты по меньшей мере частично перекрывают друг друга. Однако для некоторых вариантов осуществления возможно, что два или более из указанных соответствующих охватов не перекрывают друг друга.
Согласно некоторым вариантам осуществления, стояночный комплекс аэропорта выполнен с возможностью обнаружения и отслеживания приближающегося воздушного судна на основе объединенных выходных данных от указанной радиолокационной системы, с одной стороны, и от указанных одной или более дополнительных систем, с другой стороны.
Это может быть выгодно, поскольку позволяет повысить общую точность обнаружения и отслеживания. В некоторых ситуациях одна система объединенной системы может быть более точной, чем другая. В таком случае в стояночном комплексе аэропорта обнаружение и отслеживание могут быть преимущественно основаны на выходных данных из наиболее точной системы. Также возможно, что разные системы демонстрируют разную точность или чувствительность в разных пространственных местоположениях зоны стоянки или в разных пространственных положениях приближающегося воздушного судна. Таким образом, возможно, что обнаружение и отслеживание основаны на выходных данных из двух или более систем с разными относительными весами, зависящими от пространственного положения. Также возможно, что две или более системы имеют частично разные зоны охвата в зоне стоянки. В таком случае можно обнаруживать воздушное судно с помощью одной системы, когда оно входит в зону стоянки, а затем автоматически переключаться на другую, более точную систему, когда воздушное судно вошло в зону охвата этой системы.
Стояночный комплекс аэропорта может быть выполнен с возможностью обнаружения и отслеживания приближающегося воздушного судна на основе пространственно разрешенного взвешенного среднего значения объединенных выходных данных, при этом взвешенное среднее значение определяется на основе статистических весов для радиолокационной системы и одной или более дополнительных систем, соответственно.
Статистические веса могут быть предварительно заданы, например, извлечены из базы данных или введены пользователем. В качестве альтернативы, статистические веса могут определяться стояночным комплексом аэропорта. Стояночный комплекс аэропорта может быть выполнен с возможностью определения статистических весов на основе связанных выходных данных от соответствующих систем объединенной системы. Стояночный комплекс аэропорта может быть выполнен с возможностью определения видимости на основе выходных данных от одной или более дополнительных систем и определения указанных статистических весов на основе указанной видимости.
Взвешенное среднее может иметь пространственное разрешение. Это означает, что взвешенное среднее может быть основано на выходных данных, относящихся к одному и тому же пространственному местоположению в зоне стоянки. Таким образом, зона охвата радиолокационной системы может перекрываться с зонами охвата одной или более дополнительных систем. Взвешенное среднее объединенных выходных данных может использоваться для определения информации с пространственным разрешением, относящейся к положению приближающегося воздушного судна.
Стояночный комплекс аэропорта может быть выполнен с возможностью определения, на основе выходных данных от первой системы объединенной системы, того, должна ли использоваться вторая система объединенной системы вместо или в сочетании с первой системой для обнаружения и отслеживания приближающегося воздушного судна.
Объединенная система может содержать лазерную систему и систему формирования изображения, при этом стояночный комплекс аэропорта выполнен с возможностью определения, на основе выходных данных от лазерной системы, того, должна ли использоваться система формирования изображения вместо или в сочетании с лазерной системой для обнаружения и отслеживания приближающегося воздушного судна. Стояночный комплекс аэропорта может быть выполнен с возможностью определения видимости на основе выходных данных от одной или более указанных дополнительных систем и определения того, должна ли использоваться система формирования изображения вместо или в сочетании с лазерной системой, на основе упомянутой видимости.
У лазерных систем может быть более короткий срок службы, чем у радиолокационных систем. Таким образом, может быть выгодно обеспечить возможность стояночному комплексу аэропорта, оборудованному такой лазерной системой, минимизировать использование лазерной системы.
Стояночный комплекс аэропорта может быть выполнен с возможностью определения того, может ли обнаружение и отслеживание приближающегося воздушного судна и/или других объектов в зоне стоянки быть основано на выходных данных от радиолокационной системы, и,
если стояночный комплекс аэропорта определяет, что обнаружение и отслеживание приближающегося воздушного судна и/или других объектов в зоне стоянки не может быть основано на выходных данных от радиолокационной системы:
инициирования обнаружения и отслеживания воздушного судна и/или других объектов в зоне стоянки с использованием одной или более дополнительных систем.
Одна или более дополнительных систем могут содержать лазерную систему и систему формирования изображения, используемые в комбинации. Например, стояночный комплекс аэропорта может быть выполнен с возможностью обнаружения и отслеживания приближающегося воздушного судна на основе объединенных выходных данных от лазерной системы и системы формирования изображения. Это означает, что зона охвата лазерной системы и зона охвата системы формирования изображения по меньшей мере частично перекрываются.
Согласно некоторым вариантам осуществления, одна или более дополнительных систем включают в себя систему формирования изображения, и причем стояночный комплекс аэропорта выполнен с возможностью:
обнаружения и отслеживания объекта из указанных других объектов, на основе выходных данных от системы формирования изображения и
проверки наличия указанного обнаруженного и отслеживаемого объекта на основе выходных данных от дополнительной системы из одной или более дополнительных систем и/или выходных данных от радиолокационной системы.
Система формирования изображения может предоставлять выходные данные, имеющие более высокое пространственное разрешение, чем выходные данные радиолокационной системы и/или выходные данные лазерной системы. Это может быть преимуществом, поскольку система формирования изображения может опознавать также более мелкие объекты, присутствующие в зоне стоянки. Однако обнаружение объекта на основе изображений может привести к тому, что артефакты изображения, такие как тени, будут ошибочно идентифицированы как реальные объекты. Путем проверки предполагаемого существования объекта с помощью радиолокационной системы и/или, например, лазерной системы, этот потенциальный недостаток системы формирования изображения может быть преодолен.
Согласно некоторым вариантам осуществления, две или более систем объединенной системы находятся на расстоянии друг от друга, так чтобы в каждой временной точке обнаруживать приближающееся воздушное судно с использованием разных углов сбора данных.
Это может быть выгодно, поскольку позволяет расширить общую зону охвата стояночного комплекса аэропорта. Например, одна система объединенной системы может быть выполнена с возможностью обнаружения приближающегося воздушного судна сбоку, а другая система объединенной системы - спереди. Это может быть особенно выгодно для предоставления выходных данных, которые более надежны для прогнозирования угла приближающегося воздушного судна. На некоторых стоянках аэропортов воздушное судно должно маневрировать по относительно узкой изогнутой линии заруливания для прибытия на место стоянки. Такие зоны стоянки предпочтительно могут быть оборудованы стояночным комплексом для воздушных судов, имеющим такие дистанционные системы объединенных систем.
Согласно некоторым вариантам осуществления, по меньшей мере одна система объединенной системы расположена так, что ее связанная зона охвата распространяется на участок зоны стоянки, который по меньшей мере частично перекрывается с частью зоны стоянки, заблокированной с помощью блокирующей конструкции в зоне стоянки от обнаружения и отслеживания с использованием остальных систем объединенной системы.
Согласно некоторым вариантам осуществления, блокирующая конструкция в зоне стоянки представляет собой пассажирский трап. Однако, в качестве альтернативы, блокирующая конструкция может быть частью здания или другой более или менее постоянной конструкции, присутствующей в зоне стоянки.
Согласно некоторым вариантам осуществления, указанная по меньшей мере одна система расположена на или у блокирующей конструкции.
Это может быть выгодно, поскольку позволяет стояночному комплексу аэропорта отслеживать «темные области», которые в противном случае закрыты для обзора крупными объектами, такими как, например, пассажирский трап в зоне стоянки. Если по меньшей мере одна система объединенной системы размещена на блокирующей конструкции или вблизи нее, часть зоны стоянки, которая эффективно блокируется от обзора остальных систем, может быть специально выбрана целью по меньшей мере одной системы.
Радиолокационная система может быть выполнена так, чтобы испускать радиолокационное излучение в направлении вдоль линии заруливания в сторону приближающегося воздушного судна. Это означает, что радиолокационная система может быть расположена на дисплее или вблизи него.
Согласно некоторым вариантам осуществления, стояночный комплекс аэропорта дополнительно выполнен с возможностью определения видимости на основе выходных данных от одной или более указанных дополнительных систем. Видимость можно определять с помощью лазерной системы. Например, видимость может быть определена на основе отношения между обратно рассеянным лазерным излучением и испускаемым лазерным излучением. В качестве альтернативы или дополнительно, видимость может быть определена с использованием системы формирования изображения. Например, видимость может быть определена путем сравнения различных пространственных областей захваченных изображений. Видимость может быть основана на выходных данных от одной системы объединенной системы, но альтернативно может быть основана на выходных данных от двух или более систем объединенной системы. Например, видимость может быть определена на основе взвешенного среднего значения соответствующей видимости, определенной каждой системой объединенной системы.
Согласно некоторым вариантам осуществления, стояночный комплекс аэропорта выполнен с возможностью, в ответ на то, что указанная видимость ниже первого порогового значения видимости, обнаружения и отслеживания приближающегося воздушного судна на основе выходных данных от радиолокационной системы.
Это может быть выгодно, поскольку позволяет уменьшить влияние условий видимости на точность и чувствительность обнаружения и отслеживания стояночным комплексом аэропорта. Например, стояночный комплекс аэропорта может быть выполнен с возможностью обнаружения и отслеживания воздушного судна на основе выходных данных от лазерной системы в качестве настройки по умолчанию, и, когда определено, что видимость ниже первого порогового значения видимости, переключаться от лазерной системы к радиолокационной системе, чтобы вместо этого обнаруживать и отслеживать воздушное судно на основе выходных данных от радиолокационной системы.
Зона охвата радиолокационной системы может быть больше зоны охвата любой из дополнительных систем. В частности, диапазон обнаружения и отслеживания радиолокационной системы может быть шире, чем диапазон обнаружения и отслеживания любой из дополнительных систем. Более широкий диапазон радиолокационной системы может быть выгодным, поскольку он позволяет обнаруживать и отслеживать приближающееся воздушное судно раньше во время приближения. Кроме того, он позволяет использовать стояночный комплекс аэропорта для стоянок аэропорта, в которых расстояние между положением остановки и положением, в котором расположена система обнаружения, больше обычного. Это может иметь место, например, для зон стоянки, где одна или более систем объединенной системы по практическим соображениям должны быть установлены на здании, таком как здание терминала аэропорта, которое расположено на некотором расстоянии от положения остановки. Если расстояние между положением остановки и положением, в котором расположена система обнаружения, слишком велико, например, более 65 метров, зона охвата, например диапазон действия одной или более систем объединенной системы, может быть недостаточной для обнаружения и отслеживания приближающегося воздушного судна.
В некоторых погодных условиях, таких как дымка, туман, снег, дождь и песчаные бури, лазерная система и/или система формирования изображения могут быть не в состоянии обнаруживать и отслеживать приближающееся воздушное судно из-за высокой степени обратного рассеяния атмосферы от присутствующих в воздухе рассеивающих частиц (капель дождя, песчинок и т.д.). В таких условиях радиолокационная система способна обнаруживать воздушное судно. Преимущество использования радиолокационной системы в сочетании с одной или более дополнительными системами заключается в том, что для приближающегося воздушного судна может быть обеспечена возможность приблизиться дальше в зону стоянки даже в ситуациях, когда одна или более дополнительных систем могут быть не в состоянии обнаруживать приближающееся воздушное судно, например из-за плохих погодных условий. Таким образом, стояночный комплекс аэропорта может обеспечивать возможность приближения воздушного судна к месту стоянки также в погодных условиях, когда традиционные стояночные комплексы аэропорта должны указывать на прерывание приближения. Однако, одна или более дополнительных систем могут быть более точными при обнаружении и отслеживании воздушного судна, чем радиолокационная система, если только воздушное судно находится достаточно близко, чтобы быть в пределах их диапазона действия. Например, одна или более дополнительных систем могут предоставлять выходные данные, по которым можно точно определить тип и/или модель воздушного судна. Для некоторых погодных условий одна или более дополнительных систем могут выполнять такое обнаружение и отслеживание, если только для приближающегося воздушного судна обеспечена возможность входить в зону (зоны) охвата одной или более дополнительных систем.
Согласно некоторым вариантам осуществления, зона охвата радиолокационной системы распространяется дальше от положения парковки, чем связанные зоны охвата указанных одной или более дополнительных систем, как определено вдоль направления, в котором ожидается вхождение приближающегося воздушного судна в зону стоянки,
причем стояночный комплекс аэропорта выполнен с возможностью, на основе выходных данных от радиолокационной системы, обнаружения и отслеживания приближающегося воздушного судна в зоне охвата радиолокационной системы для обеспечения возможности приближения приближающегося воздушного судна и вхождения в связанные зоны охвата одной или более дополнительных систем, и
при этом стояночный комплекс аэропорта выполнен с возможностью, на основе выходных данных от указанных одной или более дополнительных систем, обнаружения и отслеживания приближающегося воздушного судна в пределах связанных зон охвата указанных одной или более дополнительных систем.
Это может быть выгодно, поскольку обеспечивает возможность для стояночного комплекса аэропорта использовать возможности широкого диапазона действия радиолокационной системы для выполнения первого обнаружения и отслеживания приближающегося воздушного судна уже тогда, когда приближающееся воздушное судно находится на некотором расстоянии от зоны стоянки вне досягаемости систем дополнительной системы, т.е. в положении, расположенном за пределами связанной зоны охвата по меньшей мере одной дополнительной системы.
Указанное первое обнаружение и отслеживание приближающегося воздушного судна может использоваться для оценки ожидаемой траектории приближения приближающегося воздушного судна. Для вариантов осуществления, в которых стояночный комплекс аэропорта не выполнен с возможностью определения типа и/или модели приближающегося воздушного судна, т.е. выполнения этапа идентификации, на основе выходных данных от радиолокационной системы, выходные данные от радиолокационной системы все еще могут использоваться для обнаружения и отслеживания еще неидентифицированного приближающегося воздушного судна, так чтобы позволить приближающемуся воздушному судну приблизиться к месту стоянки и войти в зону охвата по меньшей мере одной дополнительной системы. Это может позволить выполнить этап идентификации с помощью по меньшей мере одной дополнительной системы. Однако, также возможно, что стояночный комплекс аэропорта выполнен с возможностью определения типа и/или модели приближающегося воздушного судна на основе выходных данных от радиолокационной системы.
Согласно некоторым вариантам осуществления, стояночный комплекс аэропорта дополнительно выполнен с возможностью, на основе выходных данных от указанных одной или более дополнительных систем, определения типа и/или модели приближающегося воздушного судна на основе выходных данных от указанных одной или более дополнительных систем.
Согласно некоторым вариантам осуществления, стояночный комплекс аэропорта дополнительно выполнен с возможностью, в ответ на то, что стояночный комплекс аэропорта не способен определить тип и/или модель приближающегося воздушного судна, предоставления дополнительной руководящей информации по маневрированию для пилота, инструктирующей пилота остановить воздушное судно.
Согласно некоторым вариантам осуществления, стояночный комплекс аэропорта дополнительно выполнен с возможностью, путем использования лазерной системы одной или более дополнительных систем, обнаружения сигнала обратного рассеяния, исходящего от объема в зоне стоянки, и,
в ответ на то, что стояночный комплекс аэропорта способен обнаруживать указанный сигнал обратного рассеяния:
предоставления дополнительной руководящей информации по маневрированию для пилота, инструктирующей пилота приблизиться к месту стоянки,
определения того, соответствует ли модель сигнала обратного рассеяния по меньшей мере одной заданной модели сигнала из библиотеки разрешенных моделей сигнала, и
в ответ на то, что стояночный комплекс аэропорта не способен определить то, соответствует ли модель сигнала обратного рассеяния по меньшей мере одной заданной модели сигнала из библиотеки разрешенных моделей сигнала:
обнаружения и отслеживания приближающегося воздушного судна на основе выходных данных от радиолокационной системы, и в ответ на то, что стояночный комплекс аэропорта не способен обнаружить
указанный сигнал обратного рассеяния:
предоставления дополнительной руководящей информации по маневрированию для пилота, инструктирующей пилота остановить воздушное судно.
Дополнительная руководящая информация по маневрированию для пилота может предоставляться пилоту на дисплее, но альтернативно или дополнительно может предоставляться с использованием других средств, такими как беспроводная связь с использованием средств беспроводной передачи, что будет рассмотрено далее.
Это может быть выгодно, поскольку позволяет стояночному комплексу аэропорта обеспечить возможность приближения воздушного судна к месту стоянки также в ситуациях, когда по меньшей мере одна дополнительная система не может обнаружить и отследить приближающееся воздушное судно на расстоянии. Путем использования радиолокационной системы для обнаружения и отслеживания, может быть обеспечена возможность приближения воздушного судна к зоне охвата по меньшей мере одной дополнительной системы. Это может дать шанс по меньшей мере одной дополнительной системе выполнить идентификацию. В случае успеха этого, воздушному судну может быть разрешено продолжить приближение к месту стоянки. В случае неудачи, воздушному судну может быть приказано остановиться, поскольку безопасность не может быть гарантирована.
Более того, исходя из опыта и эмпирических испытаний, может быть множество известных моделей сигналов обратного рассеяния, которые, как известно, по меньшей мере вероятно, приведут к успешной идентификации воздушного судна, если только воздушному судну разрешено войти в зону охвата по меньшей мере одной дополнительной системы. Такие известные модели сигналов могут храниться в библиотеке, такой как база данных. Таким образом, также в ситуациях, когда сигнал обратного рассеяния указывает на сильное атмосферное рассеяние, природа этого рассеяния может быть такой, что воздушное судно может быть идентифицировано, когда оно находится достаточно близко. Без радиолокационной системы такие атмосферные условия могли бы фактически предотвратить приближение воздушного судна для входа в зону охвата по меньшей мере одной дополнительной системы, в результате чего этап идентификации не мог бы быть осуществлен.
Согласно некоторым вариантам осуществления, стояночный комплекс аэропорта дополнительно содержит средства беспроводной передачи, и причем стояночный комплекс аэропорта выполнен с возможностью, в ответ на то, что указанная видимость ниже второго порогового значения видимости, которое ниже указанного первого порогового значения видимости, беспроводной передачи, с использованием средств беспроводной передачи, сигнала, содержащего указанную руководящую информацию по маневрированию для пилота, в приближающееся воздушное судно.
Это может быть выгодно, поскольку позволяет осуществить парковку воздушного судна в положение парковки на месте стоянки даже в условиях видимости, достаточно суровых для того, чтобы пилот не был способен видеть дисплей. Сигнал может быть принят оборудованием, установленным внутри воздушного судна, и может быть отображен на дисплее в кабине воздушного судна. Сигнал может передаваться с использованием отдельного средства беспроводной передачи. Однако также возможно, чтобы сигнал передавался как часть радиолокационных сигналов, излучаемых радиолокационной системой.
Согласно некоторым вариантам осуществления, стояночный комплекс аэропорта дополнительно выполнен с возможностью:
в качестве первого этапа определения, определения того, присутствует или нет воздушное судно в указанном положении парковки по меньшей мере на основе выходных данных от указанных одной или более дополнительных систем, и
в ответ на отрицательное определение на указанном первом этапе определения и в качестве второго этапа определения, определения того, присутствует или нет воздушное судно в указанном положении парковки на основе выходных данных от указанной радиолокационной системы;
передачи сигнала присутствия воздушного судна в ответ на положительное определение на любом из указанного первого и указанного второго этапов определения; и
передачи сигнала неприсутствия воздушного судна в ответ на отрицательное определение на обоих из указанного первого и указанного второго этапов определения.
Сигнал присутствия воздушного судна и/или сигнал неприсутствия воздушного судна может быть передан персоналу, обслуживающему стояночный комплекс аэропорта на месте стоянки. В качестве альтернативы, сигнал о присутствии воздушного судна и/или сигнал о неприсутствии воздушного судна может быть передан во внешнюю систему, такую как операционная база данных аэропорта, AODB (от англ. airport operational database), связанная с стояночным комплексом аэропорта.
Это может быть выгодно, поскольку позволяет автоматически определять занятость стоянок аэропорта даже в плохих погодных условиях. Например, соответствующие стояночные комплексы аэропорта множества стоянок в аэропорту могут быть подключены к центральной системе, такой как операционная база данных аэропорта, AODB. AODB может запросить то, какие места стоянки заняты в определенное время. Также возможно, что стояночный комплекс аэропорта выполнен с возможностью определения того, покидает ли воздушное судно место стоянки или приближается к месту стоянки.
Согласно некоторым вариантам осуществления, стояночный комплекс аэропорта дополнительно выполнен с возможностью определения, в качестве третьего этапа определения, того, находится ли пассажирский трап в предварительно заданном положении пассажирского трапа, на основе выходных данных от радиолокационной системы. В ответ на отрицательное определение на третьем этапе определения, стояночный комплекс аэропорта может быть выполнен с возможностью передачи сигнала о неправильном местоположении пассажирского трапа. В ответ на отрицательное определение на третьем этапе определения, стояночный комплекс аэропорта может быть дополнительно выполнен с возможностью предоставления дополнительной руководящей информации по маневрированию для пилота, инструктирующей пилота остановить воздушное судно.
Согласно некоторым вариантам осуществления, стояночный комплекс аэропорта дополнительно выполнен с возможностью обнаружения и отслеживания других объектов в зоне стоянки. Комплекс может быть дополнительно выполнен с возможностью обнаружения и отслеживания указанных других объектов в пределах зоны стоянки параллельно с указанным обнаружением и отслеживанием приближающегося воздушного судна во время указанного маневрирования приближающимся воздушным судном к положению парковки.
Другие объекты могут включать любые объекты, отличные от приближающегося воздушного судна. В типичном случае другие объекты относятся к оборудованию наземного обеспечения (GSE, от англ. ground support equipment) аэропорта. К такому оборудованию относятся, например, тягачи и тележки для багажа, грузовики для доставки еды, заправщики и транспортные автобусы. Другими примерами являются колодки и служебные лестницы для воздушных судов. Однако другие объекты не ограничиваются оборудованием наземного обеспечения. Таким образом, другие объекты могут, например, включать в себя другое воздушное судно, случайно вошедшее в зону стоянки, багаж, упавший в зоне стоянки, или даже людей. Другие объекты могут быть неподвижными или движущимися.
Согласно некоторым вариантам осуществления, указанный комплекс дополнительно выполнен с возможностью прогнозирования того, находится ли приближающееся воздушное судно на курсе столкновения с любым из указанных других объектов, и, в ответ на прогнозирование курса столкновения, предоставления дополнительной руководящей информации по маневрированию для пилота, инструктирующей пилота остановить воздушное судно.
Согласно некоторым вариантам осуществления, стояночный комплекс аэропорта выполнен с возможностью, на основе по меньшей мере скорости и направления каждого из указанных других объектов и скорости и направления приближающегося воздушного судна, определения того, прогнозируется ли покидание указанными другими объектами зоны стоянки до прогнозируемого прибытия приближающегося воздушного судна, и, в ответ на определение того, что не прогнозируется покидание указанными другими объектами зоны стоянки до прогнозируемого прибытия приближающегося воздушного судна: предоставления дополнительной руководящей информации по маневрированию для пилота, инструктирующей пилота остановить воздушное судно.
Стояночный комплекс аэропорта может быть дополнительно выполнен с возможностью идентификации события в зоне стоянки на основе обнаружения и отслеживания указанных других объектов в пределах зоны стоянки. Например, присутствие грузовика для доставки еды (то есть грузовика общественного питания) в зоне стоянки может вызвать «событие погрузки еды», которое может, например, предполагать передачу сигнала наземной бригаде аэропорта и/или пилоту о том, что еда скоро прибудет. В качестве другого примера, стояночные колодки для колес воздушного судна, которые устанавливаются вручную на каждом колесе воздушного судна, когда воздушное судно находится в положении остановки, могут обнаруживаться стояночным комплексом аэропорта, чтобы вызвать «событие, связанное с безопасностью воздушного судна». Таким образом, стояночный комплекс аэропорта может гарантировать, что самолет надежно припаркован и не может случайно начать движение в зоне стоянки. Более того, определение этих событий может помочь сделать постановку на стоянку более эффективной, поскольку стояночный комплекс аэропорта сам по себе сможет определить, что фактически происходит на месте стоянки, и на основании этого предпринять различные действия, чтобы сделать оставшиеся задачи более эффективными. Событие представляет собой одно из следующего списка: прибытие грузовика доставки еды, прибытие грузовика доставки багажа, прибытие стояночных колодок к колесу воздушного судна, прибытие топливозаправщика, прибытие пассажирского автобуса, прибытие клининговой компании, прибытие доставки воды, прибытие мусоровоза и прибытие агрегата наземного питания.
Может быть преимуществом, если стояночный комплекс аэропорта имеет информацию о типе и/или модели воздушного судна на месте стоянки. Стояночный комплекс аэропорта может быть выполнен с возможностью выборочного обследования частей зоны стоянки, где, как ожидается, будет обнаружен конкретный объект. Если, например, целью является проверка наличия стояночных колодок для задних колес воздушного судна, стояночный комплекс аэропорта может определять ожидаемое местоположение задних колес на основе модели и/или типа воздушного судна в сочетании с общей информацией о положении для воздушного судна, например, местоположение носа или переднего колеса воздушного судна. Еще один пример заключается в том, что стояночный комплекс аэропорта может определять ожидаемое местоположение грузовика доставки еды на основе модели и/или типа воздушного судна в сочетании с общей информацией о положении для воздушного судна, например, местоположение носа или переднего колеса воздушного судна.
Согласно некоторым вариантам осуществления, стояночный комплекс аэропорта выполнен с возможностью идентификации события в зоне стоянки на основе выборочного обнаружения и отслеживания объекта из указанных других объектов в конкретном местоположении в зоне стоянки, причем указанное конкретное местоположение определяется на основе типа и/или модели воздушного судна на месте стоянки и выходных данных от объединенной системы.
Согласно некоторым вариантам осуществления, одна или более дополнительных систем содержат по меньшей мере одну систему формирования изображения, и при этом стояночный комплекс аэропорта выполнен с возможностью:
обнаружения и отслеживания объекта из указанных других объектов на основе выходных данных от системы формирования изображения, и
проверки наличия указанного обнаруженного и отслеживаемого объекта на основе выходных данных от дополнительной системы из одной или более дополнительных систем и/или выходных данных от радиолокационной системы.
Согласно некоторым вариантам осуществления, указанное обнаружение и отслеживание указанных других объектов основано на выходных данных от радиолокационной системы, и причем указанное обнаружение и отслеживание приближающегося воздушного судна основано на выходных данных от указанных одной или более дополнительных систем.
Это может быть выгодно, поскольку позволяет автоматически отслеживать зону стоянки, что снижает риск несчастных случаев на месте стоянки. Слежение за зоной стоянки иногда называют проверкой стояночной площадки. В типичном случае в предшествующем уровне техники зону стоянки отслеживают вручную или с помощью дополнительных систем наблюдения, не являющихся частью стояночного комплекса аэропорта. Ни одно из этих решений не предусматривает возможности автоматического принятия решений и информирования о них пилота. В раскрытом стояночном комплексе аэропорта могут использоваться системы объединенной системы для обнаружения и отслеживания не только приближающегося воздушного судна, но и других объектов в зоне стоянки. Обнаружение и отслеживание других объектов может происходить независимо от обнаружения и отслеживания приближающегося воздушного судна. Другими словами, обнаружение и отслеживание других объектов может происходить до того, как приближающееся воздушное судно войдет в зону стоянки, и/или во время процесса парковки воздушного судна в положении парковки, и/или в то время, когда воздушное судно припарковано на месте стоянки и/или во время процесса покидания воздушным судном положения парковки в зоне стоянки, и т.д.
Согласно второму аспекту, предложен способ обнаружения и отслеживания воздушного судна в пределах зоны стоянки, когда указанное воздушное судно приближается к месту стоянки в пределах зоны стоянки для парковки в положении парковки, причем указанное обнаружение и отслеживание основано на выходных данных от радиолокационной системы и выходных данных от одной или более дополнительных систем, выбранных из лазерных систем и систем формирования изображения, причем способ включает в себя:
определение видимости на основе выходных данных от одной или более из указанных одной или более дополнительных систем,
в ответ на то, что указанная видимость ниже первого порогового значения видимости:
обнаружение и отслеживание приближающегося воздушного судна на основе выходных данных от указанной радиолокационной системы.
Согласно некоторым вариантам осуществления, способ дополнительно содержит:
в ответ на то, что указанная видимость выше первого порогового значения видимости:
обнаружение и отслеживание приближающегося воздушного судна на основе выходных данных от одной или более из указанных одной или более дополнительных систем.
Согласно некоторым вариантам осуществления способ дополнительно содержит:
предоставление, на основе указанного обнаружения и отслеживания приближающегося воздушного судна, руководящей информации по маневрированию для пилота на дисплее для содействия пилоту приближающегося воздушного судна в маневрировании воздушным судном в направлении указанного положения парковки.
Согласно некоторым вариантам осуществления, способ дополнительно содержит:
в ответ на то, что указанная видимость ниже второго порогового значения видимости, которое ниже указанного первого порогового значения видимости:
беспроводную передачу сигнала, содержащего указанную руководящую информацию по маневрированию для пилота, в приближающееся воздушное судно.
Согласно третьему аспекту, предусмотрен машиночитаемый носитель, содержащий инструкции компьютерного кода, выполненные с возможностью, при их исполнении устройством, имеющим возможности обработки, выполнения способа согласно второму аспекту.
Эффекты и признаки второго и третьего аспектов в значительной степени аналогичны раскрытым выше в связи с первым аспектом. Варианты осуществления, упомянутые в отношении первого аспекта, в значительной степени совместимы со вторым аспектом и третьими аспектами. Кроме того, следует отметить, что идеи изобретения относятся ко всем возможным комбинациям признаков, если явно не указано иное.
Другие сферы применения настоящего изобретения станет очевидными из подробного описания, приведенного ниже. Однако следует понимать, что подробное описание и конкретные примеры, хоть и показывают предпочтительные варианты осуществления изобретения, даны только для иллюстрации, поскольку различные изменения и модификации в пределах объема изобретения станут очевидными для специалистов в данной области техники из этого подробного описания.
Следовательно, следует понимать, что это изобретение не ограничивается конкретными составными частями описанного устройства или этапами описанных способов, поскольку такие устройство и способ могут варьироваться. Также следует понимать, что используемая здесь терминология предназначена только для описания конкретных вариантов осуществления и не предназначена для ограничения. Следует отметить, что, как они используются в описании и прилагаемой формуле изобретения, формы единственного числа подразумевают обозначение того, что существует один или более элементов, кроме случаев, когда контекст явно диктует иное. Таким образом, например, отсылка на «блок» или «указанный блок» может включать в себя несколько устройств и т.п. Кроме того, слова «содержащий», «включающий в себя», «содержащий в себе» и аналогичные формулировки не исключают другие элементы или этапы.
Краткое описание чертежей
Изобретение будет описано более подробно в качестве примера со ссылкой на прилагаемые схематические чертежи, которые показывают предпочтительные в настоящее время варианты осуществления изобретения.
На фиг. 1 представлен вид сверху стояночного комплекса аэропорта в зоне стоянки согласно варианту осуществления настоящего изобретения.
На фиг. 2 представлен вид сверху стояночного комплекса аэропорта в зоне стоянки согласно другому варианту осуществления настоящего изобретения.
На фиг. 3 представлен вид сверху стояночного комплекса аэропорта в зоне стоянки согласно еще одному варианту осуществления настоящего изобретения.
На фиг. 4 представлена блок-схема, иллюстрирующая функциональные возможности стояночного комплекса аэропорта в соответствии с вариантами осуществления настоящего изобретения.
На фиг. 5 представлена блок-схема, иллюстрирующая другие функциональные возможности стояночного комплекса аэропорта в соответствии с вариантами осуществления настоящего раскрытия.
На фиг. 6 представлен вид сверху стояночного комплекса аэропорта в зоне стоянки согласно еще одному варианту осуществления настоящего изобретения.
На фиг. 7 представлен вид сверху стояночного комплекса аэропорта в зоне стоянки согласно еще одному варианту осуществления настоящего изобретения.
На фиг. 8А представлена блок-схема, иллюстрирующая функциональные возможности стояночного комплекса аэропорта в соответствии с вариантами осуществления настоящего изобретения.
На фиг. 8В представлена блок-схема, иллюстрирующая функциональные возможности стояночного комплекса аэропорта в соответствии с вариантами осуществления настоящего изобретения.
Осуществление изобретения
Далее настоящее изобретение будет описано более полно со ссылкой на прилагаемые чертежи, на которых показаны предпочтительные в настоящее время варианты осуществления изобретения. Однако это изобретение может быть воплощено во многих различных формах, и его не следует истолковывать как ограниченное вариантами воплощения, изложенными в данном документе; скорее, эти варианты осуществления представлены для доскональности и полноты и полностью передают объем изобретения специалисту в данной области.
На фиг. 1 показан стояночный комплекс 100 аэропорта согласно примерному варианту осуществления. Стояночный комплекс аэропорта содержит радиолокационную систему 110R и одну или более дополнительных систем, выбранных из лазерных систем и систем формирования изображения. Как видно на фиг. 1, одна или более дополнительных систем в данном случае выбраны только из лазерных систем. В частности, одна или более дополнительных систем представляет собой лазерную систему 110L.
Радиолокационная система 110R представляет собой систему обнаружения с удаленным распознаванием, основанную на микроволновом электромагнитном излучении. Такие системы излучают непрерывные или импульсные радиолокационные сигналы в направлении цели, а также улавливают и обнаруживают радиолокационные импульсы, обратно рассеянные от цели. Радиолокационная система 110R может содержать радиолокационный датчик полупроводникового типа. Например, радиолокационный датчик может представлять собой датчик, используемый в автомобильной промышленности. Радиолокационный датчик может работать на частоте 77 ГГц. Радиолокационная система предоставляет выходные данные, относящиеся к зоне 112R охвата радиолокационной системы в зоне 20 стоянки.
Лазерная система 110L представляет собой систему обнаружения с удаленным распознаванием, основанную на оптическом электромагнитном излучении. Такие системы излучают непрерывное или импульсное лазерное излучение в направлении цели, и улавливают и обнаруживают лазерное излучение, обратно рассеянное от цели. Лазерная система 110L может содержать средство отклонения луча для обеспечения возможностей сканирования. Такие средства отклонения луча могут представлять собой, например, устройство сканирующего зеркала. Лазерная система 110L предоставляет выходные данные, относящиеся к зоне 112L охвата лазерной системы в зоне 20 стоянки.
Радиолокационная система 110R и одна или более дополнительных систем вместе образуют объединенную систему 110. Как проиллюстрировано на фиг. 1, объединенная система 110 расположена на дисплее и выполнена так, чтобы излучать лазерное излучение и радиолокационное излучение в направлении вдоль линии 162 заруливания в направлении приближающегося воздушного судна 10.
Стояночный комплекс 100 аэропорта дополнительно содержит дисплей 130 для предоставления пилоту приближающегося воздушного судна 10 руководящей информации по маневрированию для пилота. Дисплей 130 в данном случае установлен на стене терминала в вертикальном положении, причем дисплей 130 находится в зоне видимости пилота приближающегося воздушного судна 10.
Стояночный комплекс 100 аэропорта дополнительно содержит блок 120 управления, функционально соединенный с объединенной системой 110 и дисплеем 130. Блок 120 управления дополнительно функционально соединен с базой 122 данных. База 122 данных может представлять собой операционную базу данных аэропорта, AODB, содержащую планы полета прибывающих и вылетающих воздушных судов. Таким образом, блок 120 управления может получать доступ к информации, относящейся к типу воздушного судна, который будет приближаться к зоне 20 стоянки. Блок 120 управления также может иметь прямое сообщение с приближающимся воздушным судном 10, например, через ADS-B. В таком случае блок управления может получать тип воздушного судна непосредственно от воздушного судна 10, а не через базу 122 данных.
Функциональные возможности стояночного комплекса 100 аэропорта теперь будут описаны со ссылкой на фиг. 4.
Стояночный комплекс 100 аэропорта выполнен с возможностью определения S102 выходных данных, относящихся к внешнему виду зоны 20 стоянки. Такое определение может быть выполнено с использованием одной или более объединенных систем. Однако, одна предпочтительная функциональная возможность стояночного комплекса 100 аэропорта заключается в том, что выходные данные определяются S102 с использованием одной или более из дополнительных систем (в примере: лазерная система 110L). Лазерная система 110L представляет собой систему обнаружения с удаленным распознаванием, основанную на оптическом электромагнитном излучении. Такие системы излучают непрерывное или импульсное лазерное излучение в направлении цели, и улавливают и обнаруживают лазерное излучение, обратно рассеянное от цели. Лазерная система 110L содержит средства отклонения луча для обеспечения возможностей сканирования. Такие средства отклонения луча могут представлять собой, например, устройство сканирующего зеркала.
Стояночный комплекс 100 аэропорта дополнительно выполнен с возможностью определения S104 видимости V на основе выходных данных от одной или более из указанных дополнительных систем (в примере: лазерная система 110L). Как известно, туман или осадки влияют на видимость главным образом тем, что падающее электромагнитное излучение рассеивается каплями в атмосфере. В процессе рассеяния освещенные капли повторно излучают некоторую часть падающего электромагнитного излучения во всех направлениях. Затем капли действуют как точечные источники переизлучаемой энергии. Некоторая часть падающего электромагнитного излучения обратно к источнику излучения, в зависимости от соотношения между размером капли и длиной волны излучения. Взаимосвязь между видимостью и рассеянным электромагнитным излучением широко описана в литературе, как обсуждается более подробно, например, в заявке на патент WO 2007108726 А9.
Стояночный комплекс 100 аэропорта выполнен с возможностью сравнения S106 указанной видимости с первым пороговым значением V1 видимости. Если определенная видимость V оказывается ниже первого порогового значения V1 видимости, стояночный комплекс 100 аэропорта выполнен с возможностью обнаружения и отслеживания S110 приближающегося воздушного судна 10 на основе выходных данных от радиолокационной системы 110R. Таким образом, если погодные условия определены как достаточно суровые для предотвращения точного оптического удаленного распознавания с использованием лазерной системы 110L, вместо этого для обнаружения и отслеживания приближающегося воздушного судна 10 может использоваться радиолокационная система 110R. В качестве альтернативы, если определенная видимость V оказывается выше первого порогового значения V1 видимости, стояночный комплекс 100 аэропорта выполнен с возможностью обнаружения и отслеживания S108 приближающегося воздушного судна 10 на основе выходных данных от одной или более дополнительных систем (в примере: лазерная система 110L).
Независимо от того, какая система используется для предоставления выходных данных для обнаружения и отслеживания, стояночный комплекс 100 аэропорта выполняет аналогичные задачи. Как указано выше, стояночный комплекс 100 аэропорта выполнен с возможностью, на основе выходных данных от указанной объединенной системы 110, обнаружения и отслеживания S108, S110 воздушного судна 10 в пределах зоны 20 стоянки, когда указанное воздушное судно 10 приближается к месту стоянки в пределах зоны 20 стоянки для парковки в положении 160 парковки. Указанное обнаружение и отслеживание воздушного судна 10 основано на выходных данных от объединенной системы 110. Таким образом, радиолокационная система 110R и/или одна или более дополнительных систем (в примере: лазерная система 110L) выводят данные, относящиеся к объектам в зоне 20 стоянки, в контроллер 120. Контроллер 120 принимает указанные выходные данные и выполняет их анализ, чтобы определить данные отслеживания воздушного судна 10, причем указанные данные отслеживания включают в себя положение воздушного судна 10, скорость воздушного судна 10 и т.д. Кроме того, контроллер 120 может также выполнять анализ полученных выходных данных для определения размеров воздушного судна 10. Указанные размеры могут быть сравнены с размерами моделей воздушных судов, хранящихся локально в стояночном комплексе аэропорта или в AODB 122, чтобы установить тип и модель воздушного судна 10. В качестве альтернативы или дополнительно, тип и модель воздушного судна могут быть определены другими способами. Например, если воздушное судно 10 обменивается данными с системой наблюдения аэропорта с использованием стандарта ADS-B, система наблюдения аэропорта может получать идентификационные данные и местоположение воздушного судна 10, передаваемые в систему наблюдения аэропорта непосредственно от воздушного судна с использованием транспондера ADS-B воздушного судна 10. В таком случае к модели воздушного судна можно получить доступ из AODB 122 путем сравнения полученных идентификационных данных воздушного судна с известными воздушными судами, сохраненными в плане полета AODB 122. Стояночный комплекс 100 для воздушных судов может затем принимать тип и/или размеры воздушного судна от AODB 122. Стояночный комплекс 100 для воздушных судов затем может сравнивать размеры воздушного судна с размерами воздушного судна, выведенными на основе анализа выходных данных, полученных от объединенной системы 110. Таким образом, тип воздушного судна, определенный на основе прямого сообщения с воздушным судном с использованием системы ADS-B, может быть подтвержден стояночным комплексом 100 для воздушных судов.
Стояночный комплекс 100 аэропорта дополнительно выполнен с возможностью, на основе указанного обнаружения и отслеживания приближающегося воздушного судна 10, предоставления руководящей информации по маневрированию для пилота для содействия пилоту приближающегося воздушного судна 10 в маневрировании воздушным судном 10 к положению 160 парковки. Руководящая информация по маневрированию для пилота определяется блоком 120 управления путем анализа выходных данных, полученных от объединенной системы 110.
Как проиллюстрировано на фиг. 4, стояночный комплекс 100 аэропорта может, после определения руководящей информации по маневрированию для пилота, действовать по-разному, в зависимости от определенной видимости V. Таким образом, на втором этапе D113 определения видимость V сравнивается со вторым пороговым значением V2 видимости, который ниже первого порогового значения V1 видимости. Если определенная видимость V оказывается ниже, чем второе пороговое значение V2 видимости, стояночный комплекс 100 аэропорта выполнен с возможностью беспроводной передачи S116 сигнала, содержащего указанную руководящую информацию по маневрированию для пилота, в приближающееся воздушное судно 10. Для этого стояночный комплекс 100 аэропорта содержит средства 190 беспроводной передачи. Средства 190 беспроводной передачи функционально соединены с блоком 120 управления. Однако также возможно, что сигнал передается по беспроводной связи как часть радиолокационных сигналов, излучаемых радиолокационной системой 100R. Сигнал может быть принят оборудованием, установленным внутри воздушного судна 10, и может отображаться на дисплее в кабине воздушного судна. Это позволяет пилоту маневрировать воздушным судном 10 в положение 160 парковки также без руководящих указаний, обеспечиваемых дисплеем 130 комплекса 100. Например, в экстремальных погодных условиях, таких как сильный смог, пилот может маневрировать воздушным судном 10 в положение 160 для парковки, не глядя в окна кабины.
Стояночный комплекс 100 аэропорта дополнительно выполнен с возможностью обнаружения и отслеживания приближающегося воздушного судна 10 на основе объединенных выходных данных от указанной радиолокационной системы 110R, с одной стороны, и от одной или более дополнительных систем (в примере: лазерная система 110L), с другой стороны. Эта функциональная возможность позволяет повысить общую чувствительность и точность обнаружения и отслеживания в пределах зоны 20 стоянки. В примерном варианте 100 осуществления лазерная система 110L может обеспечивать более высокое пространственное разрешение в хороших погодных условиях, тогда как радиолокационная система может обеспечивать более высокую чувствительность для конкретных материалов, таких как композитные материалы. Таким образом, стояночный комплекс 100 аэропорта может, в блоке 120 управления, принимать соответствующие выходные данные от радиолокационной системы 110R и лазерной системы 110L и вместе анализировать указанные соответствующие выходные данные. Алгоритм может запускать подалгоритм предварительной обработки для определения соответствующих пространственных областей выходных данных (например, межпиксельного сопоставления), анализа каждых выходных данных в указанных соответствующих областях, чтобы определить, какие из соответствующих выходных данных содержат наиболее перспективные данные для обнаружения и отслеживания в соответствующей области. В случае, если соответствующая область содержит данные, относящиеся к носовой части воздушного судна с корпусом из композитных материалов, выходные данные от радиолокационной системы могут быть наиболее перспективными. В случае, если соответствующая область содержит данные, относящиеся к металлическому каркасу передней части воздушного судна, выходные данные от лазерной системы могут быть наиболее перспективными и т.д.
Согласно одному примерному варианту осуществления, стояночный комплекс аэропорта выполнен с возможностью обнаружения и отслеживания приближающегося воздушного судна на основе пространственно разрешенного взвешенного среднего значения объединенных выходных данных. Взвешенное среднее определяется на основе статистических весов для радиолокационной системы и одной или более дополнительных систем, соответственно. Таким образом, взвешенное среднее может быть матрицей средних значений данных, в которой каждое среднее значение данных относится к конкретному пространственному местоположению в зоне стоянки и рассчитывается как сумма взвешенных значений данных (связанных выходных данных), относящихся к одному и тому же пространственному местоположению, но обнаруженных с использованием радиолокационной системы и одной или более дополнительных систем соответственно. Перед усреднением значения данных взвешиваются индивидуально. Отдельные веса могут быть числами в диапазоне от 0 до 1. В примерном варианте осуществления стояночный комплекс аэропорта выполнен с возможностью определения статистических весов на основе связанных выходных данных от соответствующих систем объединенной системы. Другими словами, выходные данные могут быть сначала проанализированы для определения подходящих статистических весов, посредством чего может быть выполнено усреднение с использованием указанных определенных статистических весов. В примерном варианте осуществления стояночный комплекс аэропорта выполнен с возможностью определения видимости на основе выходных данных от одной или более дополнительных систем и определения статистических весов на основе видимости. В случае, если видимость окажется низкой (что указывает на плохие погодные условия), статистические веса для одной или более дополнительных систем могут быть установлены на 0 или немного выше нуля, например, в диапазоне 0-0,2, тогда как статистические веса для радиолокационной системы могут быть установлены на 1. В случае, если обнаруживается, что видимость ухудшается (что указывает на плохие, в некоторой степени, погодные условия), статистические веса для одной или более дополнительных систем могут быть установлены на 0,5, и статистические веса для радиолокационной системы могут быть установлены на 0,5. Однако это только пример, и, как понятно специалисту в данной области техники, многие другие числа или диапазоны чисел могут быть определены на основе определенной видимости.
На фиг. 2 показан стояночный комплекс 200 аэропорта согласно другому примерному варианту осуществления. Стояночный комплекс 200 аэропорта аналогичен стояночному комплексу 100 аэропорта, уже подробно описанному в настоящей заявке, за исключением того, что в данном случае одна или более дополнительных систем выбраны только из систем формирования изображения. В частности, одна или более дополнительных систем в данном случае представляют собой систему 110С формирования изображения. Система 110С формирования изображения содержит камеру, чувствительную к оптическому или инфракрасному излучению. Система 110С формирования изображения может использоваться для захвата естественного излучения от цели. Система 110С формирования изображения обеспечивает выходные данные, относящиеся к зоне 112С охвата системы формирования изображения в зоне 20 стоянки.
На фиг. 3 показан стояночный комплекс 300 аэропорта согласно другому примерному варианту осуществления. Стояночный комплекс 300 аэропорта аналогичен стояночному комплексу 100 аэропорта, уже подробно описанному в настоящей заявке, за исключением того, что в данном случае одна или более дополнительных систем содержат лазерную систему 110L и систему 110С формирования изображения. Таким образом, объединенная система 310 включает в себя три разные системы. Стояночный комплекс 300 аэропорта также отличается от стояночного комплекса 100 аэропорта тем, что система 110С формирования изображения удалена от радиолокационной 110R системы и лазерной 110L системы. Это позволяет комплексу 300 в каждой временной точке обнаруживать приближающееся воздушное судно 10 с использованием разных углов сбора данных. В частности, система 110С на основе камеры имеет зону 312С охвата, выбранную так, чтобы дополнять зоны 312L и 312R охвата радиолокационной системы 110R и лазерной системы 110L, соответственно.
Стояночный комплекс 300 аэропорта дополнительно выполнен с возможностью обнаружения и отслеживания других объектов в зоне 20 стоянки. Два других объекта показаны на фиг. 3, а именно тележка 11 для багажа и грузовик 12 для доставки еды. Как также показано на фиг. 3, тележка 11 для багажа стоит на месте, в то время как грузовик 12 для доставки еды приближается к зоне стоянки справа. Это позволяет непрерывно и автоматически отслеживать зону 20 стоянки на предмет потенциальных объектов, которые могут быть причиной несчастных случаев на стоянке.
Обычно наиболее серьезные такие происшествия связаны со случайным столкновением приближающегося воздушного судна 10 с одним или более из указанных других объектов. Таким образом, представляет интерес обнаружение и отслеживание указанных других объектов во время приближения воздушного судна 10. Таким образом, комплекс 300 выполнен с возможностью обнаружения и отслеживания других объектов 11, 12 в зоне 20 стоянки параллельно с указанным обнаружением и отслеживанием приближающегося воздушного судна 10 во время маневрирования приближающегося воздушного судна 10 к положению 160 парковки. Это может быть достигнуто разными способами. В качестве примера, обнаружение и отслеживание воздушного судна может быть основано на выходных данных от лазерной системы 110L, тогда как обнаружение и отслеживание других объектов может быть основано на выходных данных от радиолокационной системы 110R. Однако, также возможно, что обнаружение и отслеживание воздушного судна и других объектов основано на выходных данных от более чем одной системы объединенной системы 310.
Комплекс 300 дополнительно выполнен с возможностью прогнозирования того, находится ли приближающееся воздушное судно 10 на курсе столкновения с любым из указанных других объектов 11, 12, и, в ответ на то, что прогнозируется курс столкновения, предоставления дополнительной руководящей информации по маневрированию для пилота, инструктирующей пилота остановить воздушное судно 10. Прогнозирование может быть достигнуто с использованием инструментов, легко доступных специалисту. Например, оценка может выполняться на основе использования фильтра Калмана, действующего как временной фильтр, для объединения измерений (наблюдений) и модели динамики обнаруженных препятствий. Фильтр Калмана может использоваться для объединения набора измерений с течением времени для создания наиболее вероятных положений или траекторий препятствий.
Стояночный комплекс 300 аэропорта дополнительно выполнен с возможностью, на основе по меньшей мере скорости и направления каждого из указанных других объектов 11, 12 и скорости и направления приближающегося воздушного судна 10, определения того, прогнозируется ли покидание указанными другими объектами 11, 12 зоны 20 стоянки до прогнозируемого прибытия приближающегося воздушного судна 10, и, в ответ на определение того, что не прогнозируется покидание указанными другими объектами 11, 12 зоны 20 стоянки до прогнозируемого прибытия приближающегося воздушного судна 10: предоставления дополнительной руководящей информации по маневрированию для пилота, инструктирующей пилота остановить воздушное судно 10. Дополнительная руководящая информация по маневрированию для пилота может предоставляться пилоту на дисплее, но альтернативно или дополнительно может предоставляться другими средствами, такими как беспроводная связь с использованием средств беспроводной передачи.
Стояночный комплекс 300 аэропорта дополнительно выполнен с возможностью идентификации события в зоне 20 стоянки на основе обнаружения и отслеживания указанных других объектов 11,12 пределах зоны 20 стоянки. Событие идентифицируется на основе выборочного обнаружения и отслеживания объекта из указанных других объектов 11, 12 в определенном местоположении в зоне 20 стоянки, при этом упомянутое конкретное местоположение определяется на основе типа и/или модели воздушного судна и выходных данных от объединенной системы 310. Событие представляет собой одно из следующего списка: прибытие грузовика доставки еды, прибытие грузовика доставки багажа, прибытие стояночных колодок к колесу воздушного судна, прибытие топливозаправщика, прибытие пассажирского автобуса, прибытие клининговой компании, прибытие доставки воды, прибытие мусоровоза и прибытие агрегата наземного питания.
Стояночный комплекс 300 аэропорта дополнительно выполнен с возможностью обнаружения и отслеживания объекта из упомянутых других объектов 11, 12, на основе выходных данных от системы 110С формирования изображения и проверки наличия упомянутого обнаруженного и отслеживаемого объекта на основе выходных данных от дополнительной системы 110L из одной или более дополнительных систем и/или выходных данных от радиолокационной системы 110R.
На фиг. 5 показаны дополнительные функциональные возможности стояночного комплекса 300 аэропорта согласно изобретению. Для общего контроля аэропорта важно отслеживать, какие выходы доступны, а какие заняты. С этой целью, стояночный комплекс 300 аэропорта может использовать свои возможности по обнаружению и отслеживанию для непрерывного или по запросу информирования персонала стоянки и/или системы управления аэропорта о статусе занятости стоянки. Таким образом, стояночный комплекс 300 аэропорта выполнен с возможностью определения S202 выходных данных, относящихся к зоне 20 стоянки, с использованием одной или более дополнительных систем (например, лазерной системы 110L). Стояночный комплекс 300 аэропорта затем выполнен с возможностью, в качестве первого этапа S204 определения, определения S204 того, присутствует или нет воздушное судно в указанном положении парковки по меньшей мере на основе выходных данных от указанных одной или более дополнительных систем (например, лазерной системы 110L). В некоторых ситуациях, например при хороших погодных условиях, этого может быть достаточно. Если воздушное судно действительно присутствует в зоне 20 выхода, воздушное судно также будет успешно обнаружено комплексом 300. Однако, в некоторых ситуациях, например при плохих погодных условиях, характеристики воздушного судна могут не ясно отображаться в выходных данных одной или более дополнительных систем. В таком случае первый этап определения может привести к тому, что стоянка будет обнаружена как пустая, хотя на самом деле это не так -ситуация, которая может привести к серьезным авариям. Чтобы смягчить эту проблему, стояночный комплекс 300 аэропорта дополнительно выполнен с возможностью, в ответ на отрицательное определение на первом этапе определения, определения S206 выходных данных, относящихся к зоне 20 стоянки, с использованием радиолокационной системы 110R, и, в качестве второго этапа определения, определения S208 того, присутствует или нет воздушное судно в упомянутом положении стоянки, на основе выходных данных от радиолокационной системы 110R. Таким образом, в случае, если воздушное судно не может быть обнаружено одной или более дополнительными системами, используется радиолокационная система, чтобы обеспечить основу для второго мнения по данному вопросу. Наконец, стояночный комплекс 300 аэропорта выполнен с возможностью передачи S210 сигнала присутствия воздушного судна в ответ на положительное определение на любом из указанного первого и указанного второго этапов определения, и для передачи S212 сигнала о присутствии воздушного судна в ответ на отрицательное определение на обоих этапах из указанного первого и указанного второго этапов определения. Таким образом, в случае, если первый этап определения приводит к обнаружению воздушного судна в зоне 20 стоянки, второй этап определения не требуется. Однако, можно использовать оба этапа определения постоянно, чтобы еще больше повысить точность определения. Например, могут использоваться объединенные выходные данные от двух или более систем объединенной системы, как обсуждалось выше.
На фиг. 6 показан стояночный комплекс 400 аэропорта согласно другому примерному варианту осуществления. Стояночный комплекс 400 аэропорта аналогичен стояночному комплексу 300 аэропорта, описанному ранее. Однако, стояночный комплекс 400 аэропорта, по меньшей мере одна система (в примере: система 110С формирования изображения) объединенной системы 410, расположена так, что связанная с ней зона 412С охвата распространяется на участок 476 зоны 20 стоянки, который по меньшей мере частично перекрывается с частью зоны 20 стоянки, заблокированной с помощью блокирующей конструкции 480 в зоне 20 стоянки от обнаружения и отслеживания с использованием указанных остальных систем 110L, 110R объединенной системы 410. Таким образом, зона 412R охвата радиолокационной системы 110R и зона 412L охвата лазерной системы 110L не перекрываются с участком 476. В примере блокирующая конструкция 480 представляет собой пассажирский трап. По меньшей мере одна система расположена на или у блокирующей конструкции 480. Как проиллюстрировано на фиг. 6, тележка 11 для багажа расположена на участке 476 и, следовательно, может быть обнаружена и отслежена с использованием стояночного комплекса 400 аэропорта с помощью системы 110С формирования изображения, даже если радиолокационная система 110R и лазерная система 110L не могут обнаружить или отследить тележку 11 для багажа из-за того, что пассажирский трап 480 препятствует обзору.
На фиг. 7 показан стояночный комплекс 500 аэропорта согласно другому примерному варианту осуществления. Стояночный комплекс 500 аэропорта содержит радиолокационную систему 110R и лазерную систему 110L. Радиолокационная система 110R и лазерная система 110L вместе образуют объединенную систему 510. Как можно видеть на фиг. 7, зона 512R охвата радиолокационной системы 110R проходит дальше от положения 160 парковки, чем связанная зона 512L охвата лазерной системы 110L, как определено вдоль направления, вдоль которого ожидается вхождение приближающегося воздушного судна 10 в зону 20 стоянки.
Это может быть результатом проектных соображений, но, альтернативно или дополнительно, может быть результатом погодных условий, в результате, например, наличия тумана в зоне 20 стоянки, поскольку радиолокационная система 110R меньше подвержена влиянию таких погодных условий, чем лазерная система 110L, что фактически приводит к разному диапазону действия этих двух систем.
На фиг. 8А показаны функциональные возможности стояночного комплекса 500 аэропорта, проиллюстрированного на фиг. 7. Стояночный комплекс 500 аэропорта выполнен с возможностью, на основе выходных данных от радиолокационной системы 110R, обнаружения и отслеживания S302 приближающегося воздушного судна 10 в зоне 512R охвата радиолокационной системы 110R для обеспечения возможности приближения приближающегося воздушного судна 10 к месту стоянки и вхождения S304 в зону 512L охвата лазерной системы 110L одной или более дополнительных систем 510. Стояночный комплекс 500 аэропорта дополнительно выполнен с возможностью, на основе выходных данных от упомянутой лазерной системы 110L, обнаружения и отслеживания S306 приближающегося воздушного судна 10 в пределах связанной зоны 512L охвата лазерной системы 110L. Стояночный комплекс 500 аэропорта дополнительно выполнен с возможностью, на основе выходных данных от лазерной системы 110L, определения S308 типа и/или модели приближающегося воздушного судна 10 на основе упомянутых выходных данных от лазерной системы 110L. Стояночный комплекс 500 аэропорта дополнительно выполнен с возможностью, в ответ на то, что стояночный комплекс 500 аэропорта не способен определить тип и/или модель приближающегося воздушного судна 10, предоставления S310 дополнительной руководящей информации по маневрированию для пилота, инструктирующей пилота остановить воздушное судно 10. В альтернативном случае, когда стояночный комплекс 500 аэропорта способен определять тип и/или модель приближающегося воздушного судна 10, стояночный комплекс 500 аэропорта выполнен с возможностью предоставления S312 дополнительной руководящей информации по маневрированию для пилота, инструктирующей пилота продолжать приближаться к месту стоянки.
Раскрытые функциональные возможности позволяют направлять воздушное судно 10 ближе к месту 20 стоянки, чтобы позволить лазерной системе 110L определять тип и/или модель воздушного судна. Без радиолокационной системы 110R стояночный комплекс 500 аэропорта не мог бы видеть воздушное судно 10, когда оно находится за пределами зоны 512L зоны охвата лазерной системы 110L. Однако, как только воздушное судно 10 успешно направлено в зону 512L охвата лазерной системы 110L, лазерная система 110L вполне может быть способна определять тип и/или модель воздушного судна, поскольку качество сигнала может быть достаточно для этой цели в зоне 512L охвата лазерной системы 110L.
На фиг. 8 В показаны другие функциональные возможности стояночного комплекса 500 аэропорта согласно изобретению. Стояночный комплекс 500 аэропорта выполнен с возможностью, с помощью лазерной системы 110L, обнаруживать S410 сигнал 560 обратного рассеяния, исходящий из объема 570 в зоне 20 стоянки, и в ответ на то, что стояночный комплекс 500 аэропорта способен обнаруживать упомянутый сигнал 560 обратного рассеяния: предоставления S404 дополнительной руководящей информации по маневрированию для пилота, инструктирующую пилота приблизиться к месту стоянки, определения S406 того, соответствует ли шаблон сигналов 560 обратного рассеяния по меньшей мере одному заданному шаблону сигнала из библиотеки разрешенных шаблонов сигналов, и, в ответ на то, что стояночный комплекс 500 аэропорта способен определить то, соответствует ли шаблон сигнала 560 обратного рассеяния по меньшей мере одному заданному шаблону сигнала библиотеки разрешенных шаблонов сигналов: обнаружение и отслеживание S408 приближающегося воздушного судна 10 на основе выходных данных от радиолокационной системы 110R, и, в ответ на то, что стояночный комплекс 500 аэропорта не способен обнаружить упомянутый сигнал 560 обратного рассеяния: предоставление S410 дополнительной руководящей информации по маневрированию для пилота, инструктирующей пилота остановить воздушное судно 10. В альтернативной ситуации, когда комплекс 500 для постановки на место стоянки в аэропорту способен определять шаблон сигнала 560 обратного рассеяния, который соответствует по меньшей мере одному заданному шаблону сигнала из библиотеки разрешенных шаблонов сигналов, воздушному судну 10 может быть разрешено продолжать приближаться к месту стоянки.
Специалист в данной области понимает, что настоящее изобретение никоим образом не ограничивается предпочтительными вариантами осуществления, описанными выше. Напротив, в рамках прилагаемой формулы изобретения возможно множество модификаций и вариаций. Кроме того, изменения раскрытых вариантов осуществления могут быть поняты и осуществлены специалистом в области практического применения заявленного изобретения на основе изучения чертежей, описания и прилагаемой формулы изобретения.
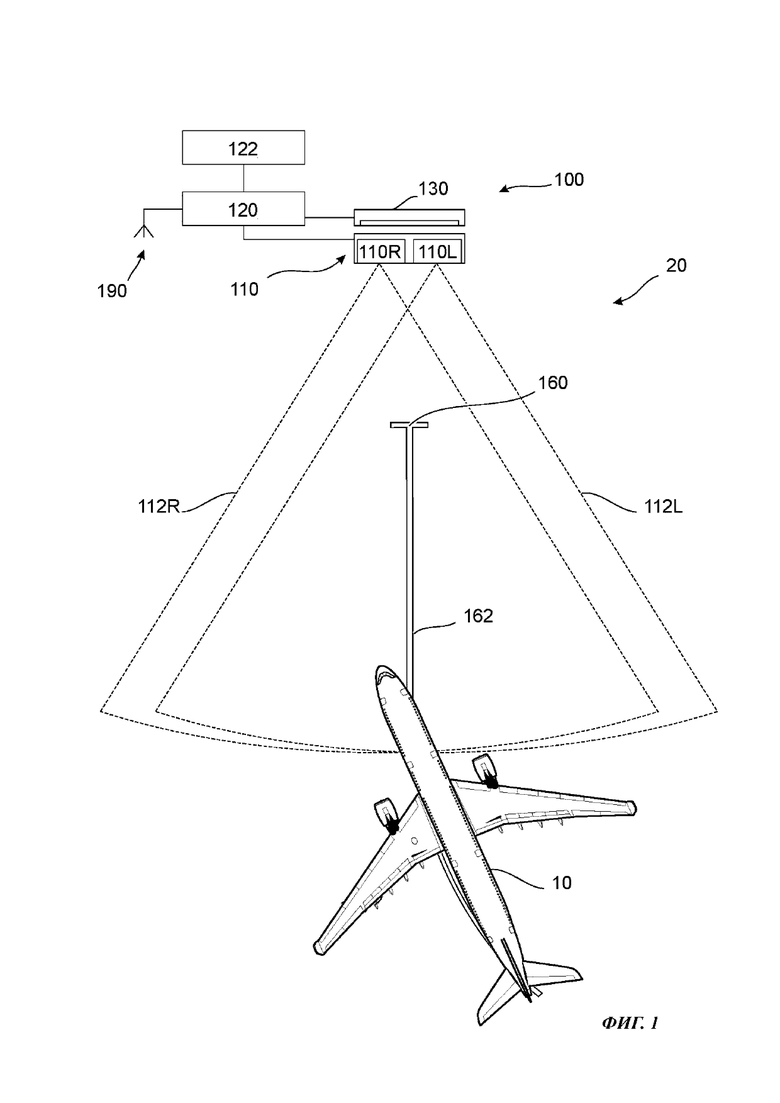
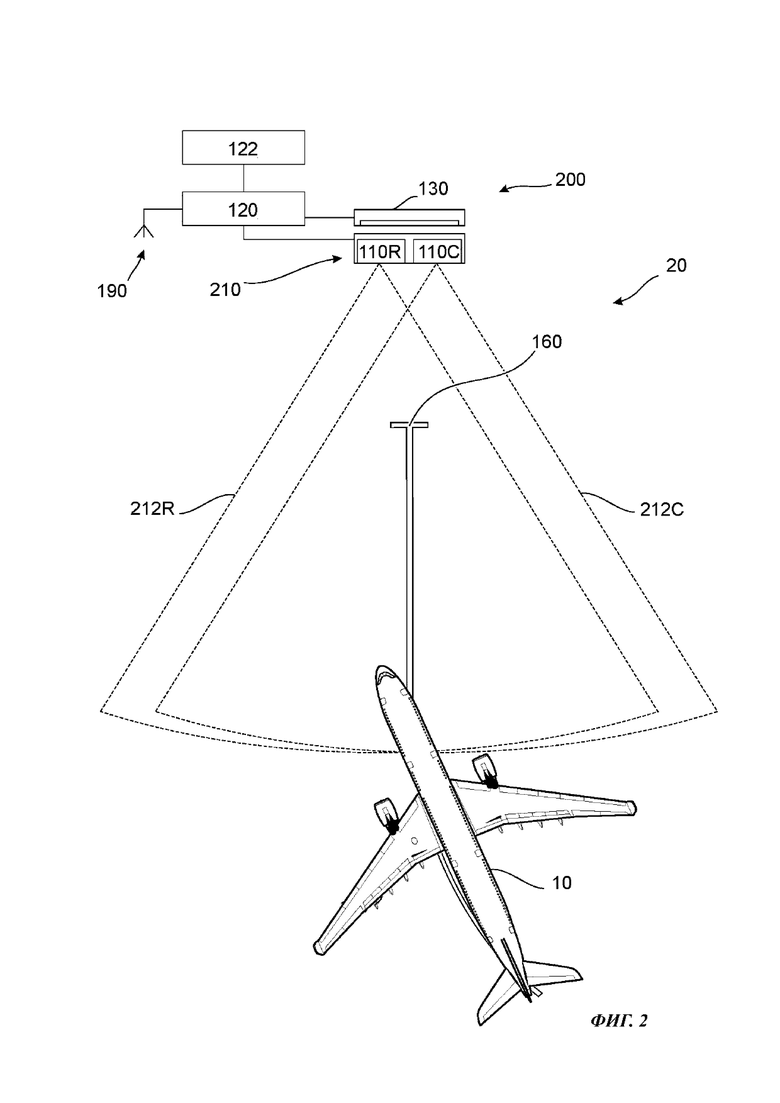
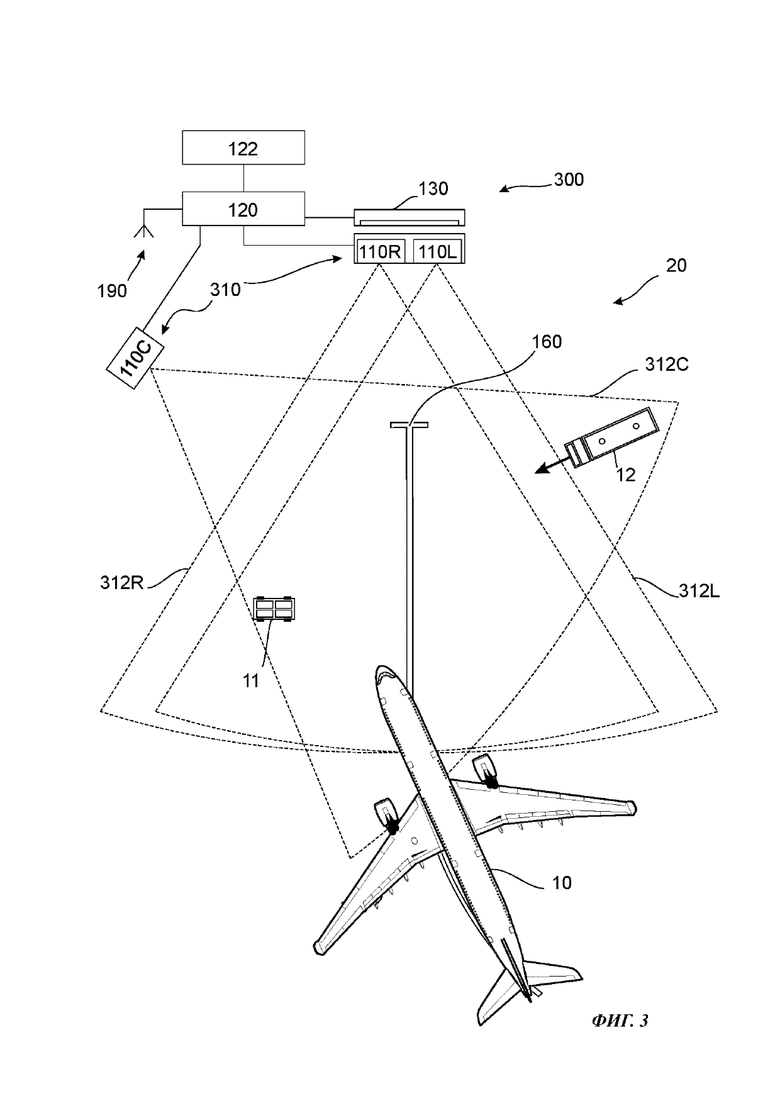
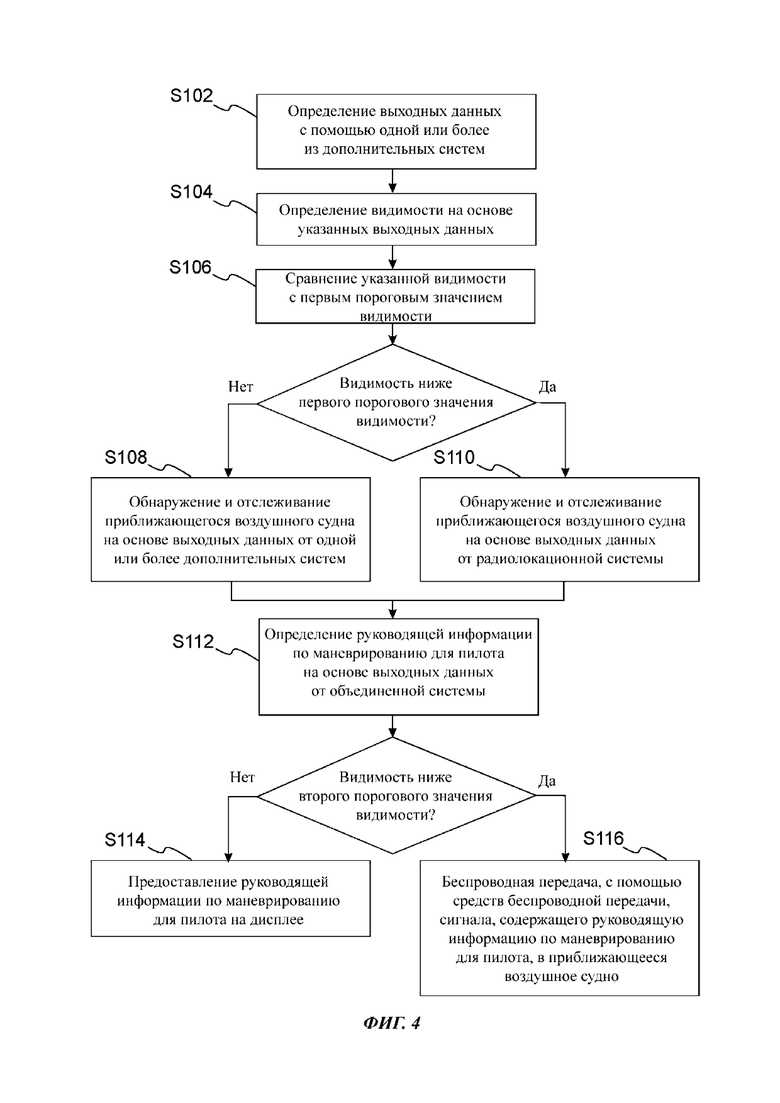
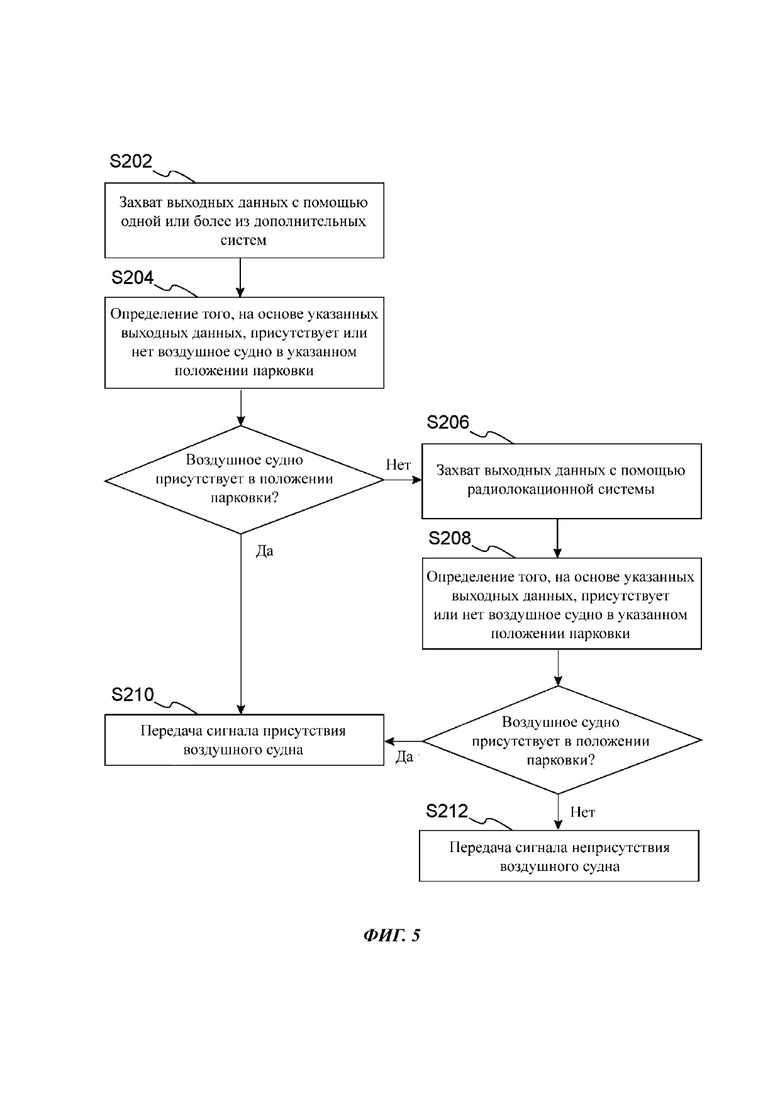
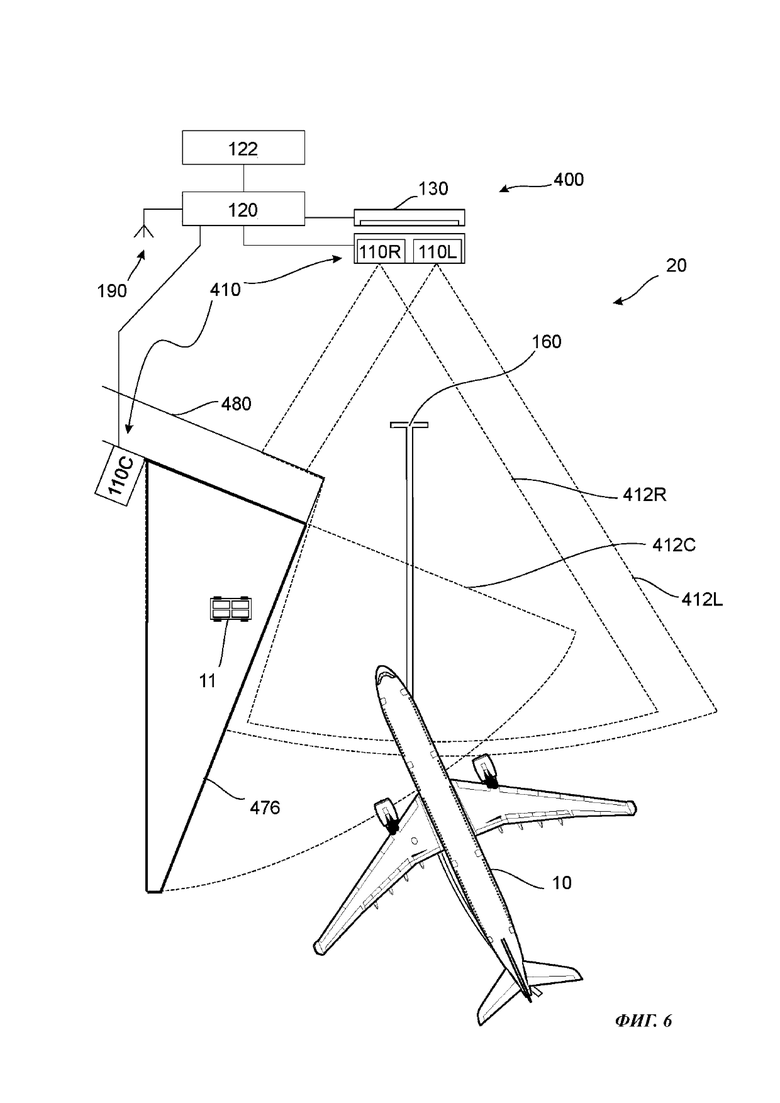
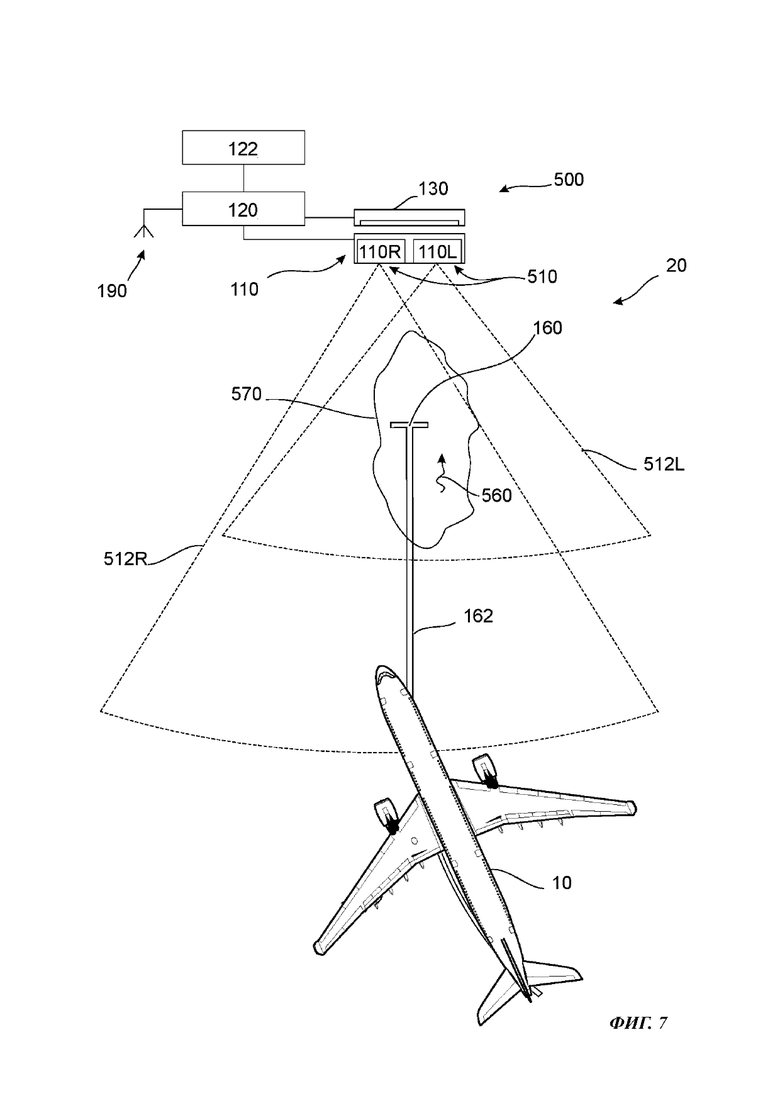

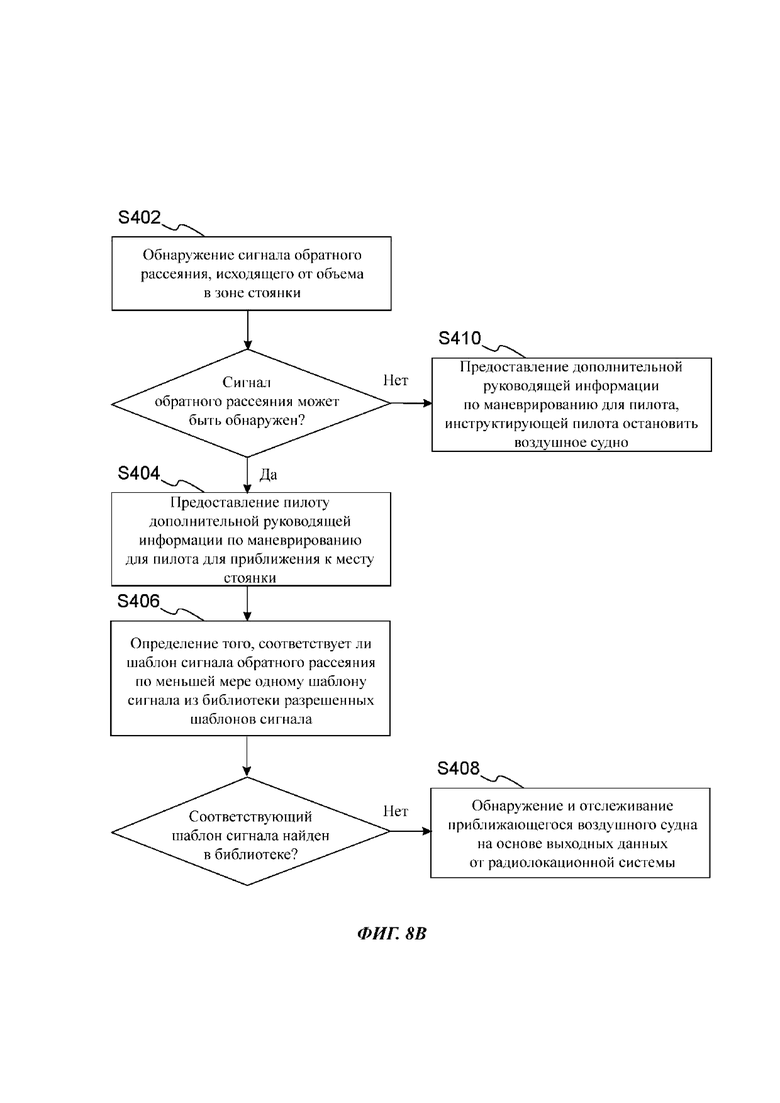
Изобретение относится к стояночному комплексу аэропорта, выполненному с возможностью содействия пилоту приближающегося воздушного судна в маневрировании воздушным судном к положению парковки на месте стоянки. Техническим результатом изобретения является обеспечение безопасной и надежной постановки воздушных судов на места стоянки в аэропортах. Заявленный стояночный комплекс (100, 200, 300) аэропорта содержит дисплей (130), радиолокационную систему (110R) и одну или более дополнительных систем, выбранных из лазерных систем (110L) и систем (110С) формирования изображения. Радиолокационная система (110R) и одна или более дополнительных систем вместе образуют объединенную систему (110, 210, 310). Стояночный комплекс (100) аэропорта выполнен с возможностью, на основе выходных данных от указанной объединенной системы (110), обнаружения и отслеживания (S108, S110) воздушного судна (10) в пределах зоны (20) стоянки, когда указанное воздушное судно (10) приближается к месту стоянки в пределах зоны (20) стоянки для парковки в положении (160) парковки, и выполнен с возможностью, на основе указанного обнаружения и отслеживания приближающегося воздушного судна (10), предоставления (S114, S116) руководящей информации по маневрированию для пилота на указанном дисплее (130) для содействия пилоту приближающегося воздушного судна (10) в маневрировании воздушным судном (10) в направлении указанного положения (160) парковки. 3 н. и 19 з.п. ф-лы, 9 ил. 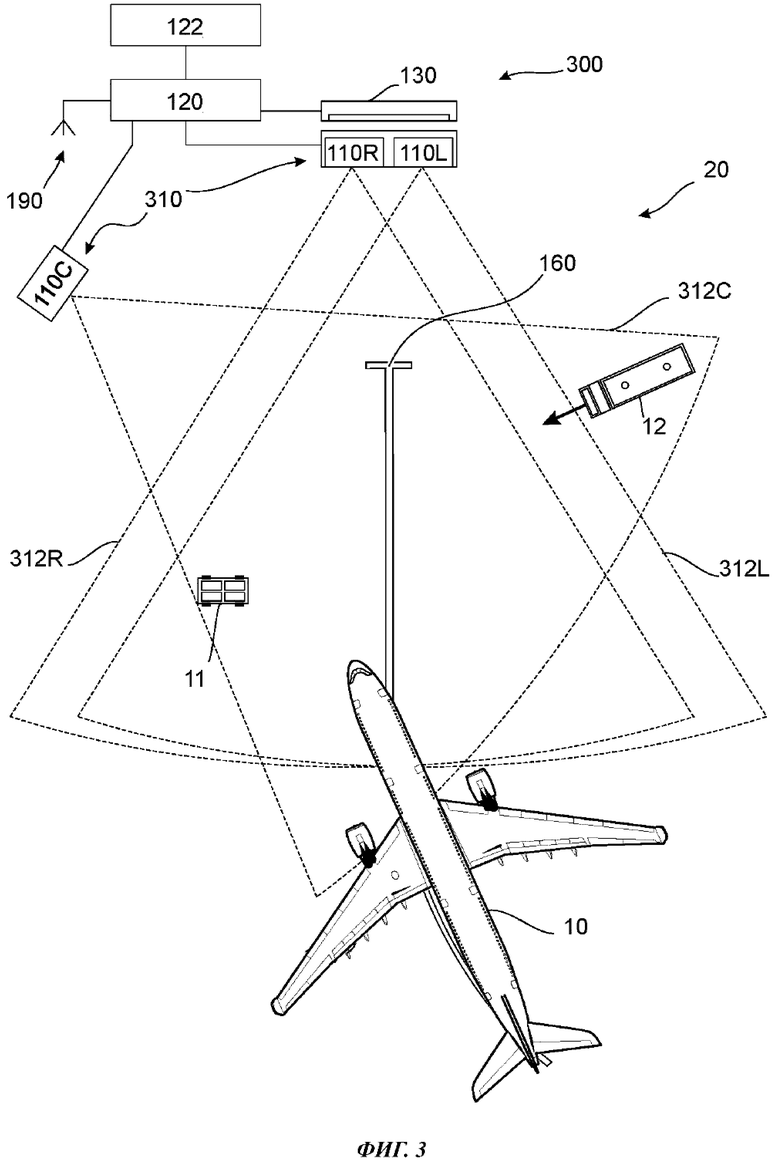
1. Стояночный комплекс (100, 200, 300) аэропорта, содержащий:
дисплей (130);
радиолокационную систему (110R)
и одну или более дополнительных систем, выбранных только из лазерных систем (110L);
причем указанная радиолокационная система (110R) и указанные одна или более дополнительных систем вместе образуют объединенную систему (110, 210, 310),
причем стояночный комплекс (100) аэропорта выполнен с возможностью, на основе выходных данных от указанной объединенной системы (110), обнаружения и отслеживания (S108, S110) воздушного судна (10) в пределах зоны (20) стоянки, когда указанное воздушное судно (10) приближается к месту стоянки в пределах зоны (20) стоянки для парковки в положении (160) парковки, и выполнен с возможностью, на основе указанного обнаружения и отслеживания приближающегося воздушного судна (10), предоставления (S114, S116) руководящей информации по маневрированию для пилота на указанном дисплее (130) для содействия пилоту приближающегося воздушного судна (10) в маневрировании воздушным судном (10) в направлении указанного положения (160) парковки,
причем две или более систем объединенной системы (310) удалены друг от друга так, чтобы в каждой временной точке обнаруживать приближающееся воздушное судно (10) с использованием разных углов сбора данных,
при этом по меньшей мере одна система (110C) объединенной системы (410) расположена так, что ее связанная зона охвата (412C) распространяется на участок (476) зоны (20) стоянки, который по меньшей мере частично перекрывается с частью зоны (20) стоянки, заблокированной с помощью блокирующей конструкции (480) в зоне стоянки от обнаружения и отслеживания с использованием остальных систем (110L, 110R) объединенной системы,
причем блокирующая конструкция (480) в зоне стоянки представляет собой пассажирский трап,
при этом указанная по меньшей мере одна система расположена на или у блокирующей конструкции (480).
2. Стояночный комплекс (100, 200, 300) аэропорта по п. 1, выполненный с возможностью обнаружения и отслеживания приближающегося воздушного судна (10) на основе объединенных выходных данных от указанной радиолокационной системы (110R), с одной стороны, и от указанных одной или более дополнительных систем (110L), с другой стороны.
3. Стояночный комплекс (100, 200, 300) аэропорта по п. 2, выполненный с возможностью обнаружения и отслеживания приближающегося воздушного судна (10) на основе пространственно разрешенного взвешенного среднего объединенных выходных данных, причем взвешенное среднее определено на основе статистических весов для радиолокационной системы (110R) и одной или более дополнительных систем (110L) соответственно.
4. Стояночный комплекс (100, 200, 300) аэропорта по п. 3, выполненный с возможностью определения статистических весов на основе связанных выходных данных от соответствующих систем объединенной системы.
5. Стояночный комплекс (100, 200, 300) аэропорта по п. 4, выполненный с возможностью определения видимости (V) на основе выходных данных от указанных одной или более дополнительных систем (110L) и определения указанных статистических весов на основе указанной видимости.
6. Стояночный комплекс (100, 200, 300) аэропорта по любому из пп. 1-5, дополнительно выполненный с возможностью определения видимости (V) на основе выходных данных от одной или более из указанных дополнительных систем (110L) и, в ответ на то, что указанная видимость (V) ниже первого порогового значения (V1) видимости, обнаружения и отслеживания приближающегося воздушного судна (10) на основе выходных данных от радиолокационной системы (110R).
7. Стояночный комплекс (100, 200, 300) аэропорта по п.6, дополнительно содержащий средства (190) беспроводной передачи, причем стояночный комплекс аэропорта выполнен с возможностью, в ответ на то, что указанная видимость (V) ниже второго порогового значения (V2) видимости, которое ниже указанного первого порогового значения (V1) видимости, беспроводной передачи (S116) с использованием средств (190) беспроводной передачи, сигнала, содержащего указанную руководящую информацию по маневрированию для пилота, в приближающееся воздушное судно (10).
8. Стояночный комплекс (500) аэропорта по любому из пп. 1-7, в котором зона (512R) охвата радиолокационной системы (110R) распространяется дальше от положения (160) парковки, чем связанные зоны (512L) охвата указанных одной или более дополнительных систем (110L), как определено вдоль направления, вдоль которого ожидается вхождение приближающегося воздушного судна (10) в зону (20) стоянки,
причем стояночный комплекс аэропорта выполнен с возможностью, на основе выходных данных от радиолокационной системы (110R), обнаружения и отслеживания приближающегося воздушного судна (10) в зоне охвата радиолокационной системы (512R) для обеспечения возможности приближения приближающегося воздушного судна (10) к месту стоянки и вхождения в связанные зоны (512L) охвата одной или более дополнительных систем (110L),
в результате чего стояночный комплекс аэропорта выполнен с возможностью, на основе выходных данных от указанных одной или более дополнительных систем (110L), обнаружения и отслеживания приближающегося воздушного судна (10) в пределах связанных зон (512L) охвата указанных одной или более дополнительных систем (110L).
9. Стояночный комплекс (500) аэропорта по п.8, дополнительно выполненный с возможностью, на основе выходных данных от указанных одной или более дополнительных систем (110L), определения типа и/или модели приближающегося воздушного судна (10) на основе выходных данных от указанных одной или более дополнительных систем (110L).
10. Стояночный комплекс (500) аэропорта по п.9, дополнительно выполненный с возможностью, в ответ на то, что стояночный комплекс аэропорта не способен определить тип и/или модель приближающегося воздушного судна, предоставления дополнительной руководящей информации по маневрированию для пилота, инструктирующей пилота остановить воздушное судно.
11. Стояночный комплекс (500) аэропорта по любому из пп.8-10, дополнительно выполненный с возможностью, путем использования лазерной системы (110L) из одной или более дополнительных систем, обнаружения сигнала (560) обратного рассеяния, исходящего от объема (570) в зоне (20) стоянки,
и в ответ на то, что стояночный комплекс аэропорта способен обнаружить указанный сигнал (560) обратного рассеяния:
предоставления дополнительной руководящей информации по маневрированию для пилота, инструктирующей пилота приблизиться к месту стоянки,
определения того, соответствует ли модель сигнала (560) обратного рассеяния по меньшей мере одной заданной модели сигнала из библиотеки разрешенных моделей сигнала,
и, в ответ на то, что стояночный комплекс аэропорта не способен определить то, соответствует ли модель сигнала (560) обратного рассеяния по меньшей мере одной заданной модели сигнала из библиотеки разрешенных моделей сигнала:
обнаружения и отслеживания приближающегося воздушного судна (10) на основе выходных данных от радиолокационной системы (110R),
и, в ответ на то, что стояночный комплекс аэропорта не способен обнаружить указанный сигнал (560) обратного рассеяния,
предоставления дополнительной руководящей информации по маневрированию для пилота, инструктирующей пилота остановить воздушное судно (10).
12. Стояночный комплекс (100, 200, 300) аэропорта по любому из пп. 1-11, дополнительно выполненный с возможностью:
в качестве первого этапа определения, определения (S204) того, присутствует или нет воздушное судно в указанном положении парковки по меньшей мере на основе выходных данных от указанных одной или более дополнительных систем,
и, в ответ на отрицательное определение на указанном первом этапе определения и в качестве второго этапа определения, определения (S208) того, присутствует или нет воздушное судно в указанном положении парковки на основе выходных данных от указанной радиолокационной системы;
передачи (S210) сигнала присутствия воздушного судна в ответ на положительное определение на любом из указанного первого и указанного второго этапов определения;
и передачи (S212) сигнала неприсутствия воздушного судна в ответ на отрицательное определение на обоих из указанного первого и указанного второго этапов определения.
13. Стояночный комплекс (100, 200, 300) аэропорта по любому из пп. 1-2, дополнительно выполненный с возможностью обнаружения и отслеживания других объектов (11, 12) в пределах зоны (20) стоянки.
14. Стояночный комплекс (100, 200, 300) аэропорта по п.13, дополнительно выполненный с возможностью обнаружения и отслеживания указанных других объектов (11, 12) в пределах зоны (20) стоянки параллельно с указанным обнаружением и отслеживанием приближающегося воздушного судна (10) во время указанного маневрирования приближающегося воздушного судна (10) к положению (160) парковки.
15. Стояночный комплекс (100, 200, 300) аэропорта по п.14, дополнительно выполненный с возможностью прогнозирования того, находится ли приближающееся воздушное судно (10) на курсе столкновения с любым из указанных других объектов (11, 12), и, в ответ на прогнозирование курса столкновения, предоставления дополнительной руководящей информации по маневрированию для пилота, инструктирующей пилота остановить воздушное судно (10).
16. Стояночный комплекс (100, 200, 300) аэропорта по любому из пп.13-15, выполненный с возможностью, на основе по меньшей мере скорости и направления каждого из указанных объектов (11, 12) и скорости и направления приближающегося воздушного судна (10), определения того, прогнозируется ли покидание указанными другими объектами (11, 12) зоны (20) стоянки до прогнозируемого прибытия приближающегося воздушного судна (10), и, в ответ на определение того, что не прогнозируется покидание указанными другими объектами (11, 12) зоны (20) стоянки до прогнозируемого прибытия приближающегося воздушного судна (10), предоставления дополнительной руководящей информации по маневрированию для пилота, инструктирующей пилота остановить воздушное судно (10).
17. Стояночный комплекс (100, 200, 300) аэропорта по любому из пп.13-16, выполненный с возможностью идентификации события в зоне (20) стоянки на основе обнаружения и отслеживания указанных других объектов (11, 12) в пределах зоны (20) стоянки.
18. Стояночный комплекс (100, 200, 300) аэропорта по п.17, выполненный с возможностью идентификации события в зоне (20) стоянки на основе выборочного обнаружения и отслеживания объекта из указанных других объектов (11, 12) в конкретном местоположении в зоне (20) стоянки, причем указанное конкретное местоположение определено на основе типа и/или модели воздушного судна на месте стоянки и выходных данных от объединенной системы (110, 210, 310).
19. Стояночный комплекс (100, 200, 300) аэропорта по п.17 или 18, в котором событие представляет собой одно из следующего списка: прибытие грузовика (12) доставки еды, прибытие грузовика доставки багажа, прибытие стояночных колодок к колесу воздушного судна, прибытие топливозаправщика, прибытие пассажирского автобуса, прибытие клининговой компании, прибытие доставки воды, прибытие мусоровоза и прибытие агрегата наземного питания.
20. Стояночный комплекс (100, 200, 300) аэропорта по любому из пп.13-19, в котором указанное обнаружение и отслеживание указанных других объектов (11, 12) основано на выходных данных от радиолокационной системы (110R), и причем указанное обнаружение и отслеживание приближающегося воздушного судна (10) основано на выходных данных от указанных одной или более дополнительных систем (110L).
21. Способ обнаружения и отслеживания воздушного судна в пределах зоны стоянки, когда указанное воздушное судно (10) приближается к месту стоянки в пределах зоны (20) стоянки для парковки в положении (160) парковки, причем указанное обнаружение и отслеживание основано на выходных данных от радиолокационной системы (110R) и выходных данных от одной или более дополнительных систем, выбранных только из лазерных систем (110L),
при этом указанная радиолокационная система (110R) и указанные одна или более дополнительных систем вместе образуют объединенную систему (110, 210, 310),
причем две или более систем объединенной системы (310) удалены друг от друга так, чтобы в каждой временной точке обнаруживать приближающееся воздушное судно (10) с использованием разных углов сбора данных,
при этом по меньшей мере одна система (110C) объединенной системы (410) расположена так, что ее связанная зона охвата (412C) распространяется на участок (476) зоны (20) стоянки, который по меньшей мере частично перекрывается с частью зоны (20) стоянки, заблокированной с помощью блокирующей конструкции (480) в зоне стоянки от обнаружения и отслеживания с использованием остальных систем (110L, 110R) объединенной системы,
причем блокирующая конструкция (480) в зоне стоянки представляет собой пассажирский трап,
при этом указанная по меньшей мере одна система расположена на или у блокирующей конструкции (480),
причем способ включает в себя:
определение видимости (V) на основе выходных данных от одной или более из указанных одной или более дополнительных систем,
в ответ на то, что указанная видимость (V) ниже первого порогового значения (V1) видимости,
обнаружение и отслеживание приближающегося воздушного судна (10) на основе выходных данных от указанной объединенной системы (110, 210, 310).
22. Машиночитаемый носитель, содержащий инструкции компьютерного кода, выполненные с возможностью, при их исполнении устройством, имеющим возможности обработки, выполнять способ по п.21.
| US 2013060457 A1, 07.03.2013 | |||
| US 2015262492 A1, 17.09.2015 | |||
| WO 2007108726 A1, 27.09.2007 | |||
| СИСТЕМА ДЛЯ УСТАНОВКИ САМОЛЕТА НА МЕСТО СТОЯНКИ И ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ НАЗЕМНЫХ СЛУЖБ | 1990 |
|
RU2093899C1 |
| DE 4009668 A1, 02.10.1991 | |||
| JP 2001187599 A, 10.07.2001 | |||
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА НА ПОЛОСЕ АЭРОПОРТА | 2008 |
|
RU2470322C2 |

