Изобретение относится к медицине, неврологии и реабилитации, к восстановительному лечению в направлениях механотерапии, физиотерапии, ортопедической помощи и терапии с применением биологической обратной связи (БОС) пациентов, перенесших инсульт.
Существующие рекомендации, установленные приказом Министерства здравоохранения РФ от 15 ноября 2012 г. № 928н «Об утверждении Порядка оказания медицинской помощи больным с острыми нарушениями мозгового кровообращения» включают в себя следующие высокотехнологичные оценки неврологического профиля: коррекция измененного психоэмоционального состояния, коррекция патологического тонуса мышц. Применение высокотехнологичных способов реабилитации в восстановлении трудовых функций и психоэмоционального состояния пациента является одним из развивающихся направлений реабилитологии.
Известен способ реабилитации пациентов, перенесших институт, с выраженными потерей контроля над моторикой, отеком, болью и спастичностью (см. Norouzi-Gheidari N, Archambault PS, Monte-Silva K, et al. Feasibility and preliminary efficacy of a combined virtual reality, robotics and electrical stimulation intervention in upper extremity stroke rehabilitation. J Neuroeng Rehabil. 2021;18(1):61. Published 2021 Apr 14. doi:10.1186/s12984-021-00851-1), при котором персонализированная программа реабилитации верхних конечностей включает следующие процедуры: (1) выполнение пациентом движений под управлением автоматизированной системой; (2) упражнения с использованием элементов виртуальной реальности для отработки движений тяги и захвата без посторонней помощи; и (3) нервно-мышечную электростимуляцию для облегчения открывания и закрывания рук. Частота использования каждой процедуры во время вмешательства определялась в соответствии с индивидуальным потенциалом восстановления рук.
Недостатком известного решения является необходимость применения роботизированной системы, выполняющей заданные врачом упражнения, в результате чего у пациента отсутствует мотивация, что уменьшает эффективность БОС в процессе реабилитации.
В качестве ближайшего аналога принят способ реабилитации верхних конечностей пациентов, перенесших инсульт, с использованием биологической обратной связи и элементами виртуальной реальности, при котором пациента оснащают оборудованием для воспроизведения контента с элементами виртуальной реальности и системой захвата движения с датчиками, загружают программный комплекс, содержащий элементы формирования контента с элементами виртуальной реальности и элементы управления, далее пациент параллельно с воспроизводимым контентом с элементами виртуальной реальности выполняет движения поврежденной частью тела при регистрации амплитуды движений и длительности их выполнения и организации биологической обратной связи (см. патент РФ № 2432971, МПК A61N 1/00, A61M 21/02, 2011 г.).
Недостатками ближайшего аналога являются:
- ограниченность движений пациента в виртуальной среде за счет фиксации акселерометров в тазовой области и туловища, что ограничивает область применения;
- отсутствие возможности проведения механотерапии или лечебной физической культуры с суставами конечностей;
- ослабление мотивации и психоэмоциональной реабилитации, поскольку использование модели дельфина в виртуальной среде в качестве аватара не позволяет пациенту ассоциировать себя с персонажем;
- нестабильность и субъективность биологической обратной связи, основанной на зрительном контакте.
Задачей, на решение которой направлено заявляемое изобретение, является разработка эффективного способа реабилитации пациентов при обеспечении автоматической, стабильной и объективной биологической обратной связи.
Технический результат, проявляющийся при решении поставленной задачи, выражается в повышении эффективности реабилитационных процедур в силу следующих факторов:
- организация автоматической, стабильной и объективной биологической обратной связи, которая не полностью управляет двигательной активностью пациента, а только корректирует объем и характер движения;
- использование программного комплекса позволяет врачу самостоятельно настраивать комплекс и порядок реабилитационных процедур, в том числе и производить персонализированную настройку, а также вносить изменения в ход реабилитационных процедур и протоколы реабилитации.
Поставленная задача решается тем, что способ реабилитации верхних конечностей пациентов, перенесших инсульт, с использованием биологической обратной связи и элементами виртуальной реальности, при котором пациента оснащают оборудованием для воспроизведения контента с элементами виртуальной реальности и системой захвата движения с датчиками, загружают программный комплекс, содержащий элементы формирования контента с элементами виртуальной реальности и элементы управления, далее пациент параллельно с воспроизводимым контентом с элементами виртуальной реальности выполняет движения поврежденной частью тела при регистрации амплитуды движений и длительности их выполнения и организации биологической обратной связи отличается тем, что пациента дополнительно оснащают системой электродов, используют программный комплекс, содержащий нормативный маршрут выполнения движений, описанных в базе данных протоколов реабилитации и функционально объединяющего систему электродов, оборудование для воспроизведения контента с элементами виртуальной реальности, систему захвата движения и электронную вычислительную машину для их управления, а также ввода и обработки информации, причем врач вводит сведения о рекомендуемом объеме движений в электронную вычислительную машину, после чего пациента оснащают оборудованием для воспроизведения контента с элементами виртуальной реальности, системой захвата движения с датчиками и системой электродов, далее производят калибровку системы захвата движения, при которой с помощью маркера регистрируют положение нижней начальной точки движения поврежденной верхней конечности, которая также является началом координат в системе захвата движения, врач подбирает протокол реабилитации из базы данных и при реабилитационных процедурах пациент параллельно с воспроизводимым контентом с элементами виртуальной реальности выполняет движения поврежденной верхней конечностью согласно протоколу реабилитации при регистрации системой захвата движения в режиме реального времени амплитуды движений в крупных суставах, % углового отклонения относительно нижней начальной точки движения поврежденной верхней конечности и длительности выполнения движений, при этом биологическую обратную связь организуют начиная со второй реабилитационной процедуры, когда в случае отклонения движения поврежденной верхней конечности от нормативного маршрута выполнения движения осуществляют многоканальную асинхронную локальную чрескожную мышечную электростимуляцию посредством системы электродов таким образом, чтобы фактический маршрут движения поврежденной верхней конечности соответствовал установленному врачом маршруту выполнения движения в виде нормативного маршрута, скорректированного с учетом рекомендуемого объема движений.
Кроме того, при калибровке системы захвата движения пациент находится в положении стоя.
Кроме того, при калибровке системы захвата движения пациент находится в положении сидя.
Кроме того, на этапе калибровки системы захвата движения врач дополнительно корректирует сведения о рекомендуемом объеме движений.
Сопоставительный анализ признаков заявляемого решения с признаками прототипа и аналогов свидетельствует о соответствии заявляемого решения критерию «новизна».
При этом отличительные признаки формулы обеспечивают решение следующих функциональных задач.
Признаки «пациента дополнительно оснащают системой электродов» обеспечивают возможность организации биологической обратной связи в виде многоканальной асинхронной локальной чрескожной мышечной электростимуляции.
Признаки «используют программный комплекс, содержащий нормативный маршрут выполнения движений, описанных в базе данных протоколов реабилитации» обеспечивают возможность использования утвержденных протоколов реабилитации и формирование на их основе базы для сравнительного анализа движений поврежденной верхней конечности.
Признаки «программный комплекс… функционально объединяет систему электродов, оборудование для воспроизведения контента с элементами виртуальной реальности, систему захвата движения и электронную вычислительную машину для их управления, а также ввода и обработки информации» обеспечивают совместную и синхронную работу различного оборудования.
Признак «врач вводит сведения о рекомендуемом объеме движений в электронную вычислительную машину» подразумевает проведение оценки состояния пациента до начала реабилитационных процедур и учет индивидуальных особенностей пациента при формировании установленного врачом маршрута выполнения движения.
Признаки «пациента оснащают оборудованием для воспроизведения контента с элементами виртуальной реальности, системой захвата движения с датчиками и системой электродов» описывают процедуру подготовки пациента к реабилитационным процедурам.
Признаки «производят калибровку системы захвата движения, при которой с помощью маркера регистрируют положение нижней начальной точки движения поврежденной верхней конечности, которая также является началом координат в системе захвата движения» и признаки зависимых пунктов формулы позволяют задать начальную точку движения поврежденной верхней конечности, синхронизированную с системой захвата движения, относительно которой организуют маршрут выполнения движения.
Признак «врач подбирает протокол реабилитации из базы данных» позволяет подобрать протокол реабилитации с учетом индивидуальных особенностей пациента.
Признаки «при реабилитационных процедурах пациент параллельно с воспроизводимым контентом с элементами виртуальной реальности выполняет движения поврежденной верхней конечностью согласно протоколу реабилитации при регистрации системой захвата движения в режиме реального времени амплитуды движений в крупных суставах, % углового отклонения относительно нижней начальной точки движения поврежденной верхней конечности и длительности выполнения движений» описывают реабилитационную процедуру и автоматически регистрируемые в процессе ее выполнения параметры, характеризующие фактический маршрут выполнения движения поврежденной верхней конечностью.
Признаки «биологическую обратную связь организуют начиная со второй реабилитационной процедуры, когда в случае отклонения движения поврежденной верхней конечности от нормативного маршрута выполнения движения осуществляют многоканальную асинхронную локальную чрескожную мышечную электростимуляцию посредством системы электродов таким образом, чтобы фактический маршрут движения поврежденной верхней конечности соответствовал установленному врачом маршруту выполнения движения в виде нормативного маршрута, скорректированного с учетом рекомендуемого объема движений» позволяют автоматически, в режиме реального времени и с учетом рекомендуемого объема движений корректировать выполнение движения поврежденной верхней конечностью на основе сравнительного анализа фактического и нормативного маршрутов выполнения движения.
На фиг. 1 показана схема установки системы электродов:
а - вид пациента спереди;
б - вид пациента сзади.
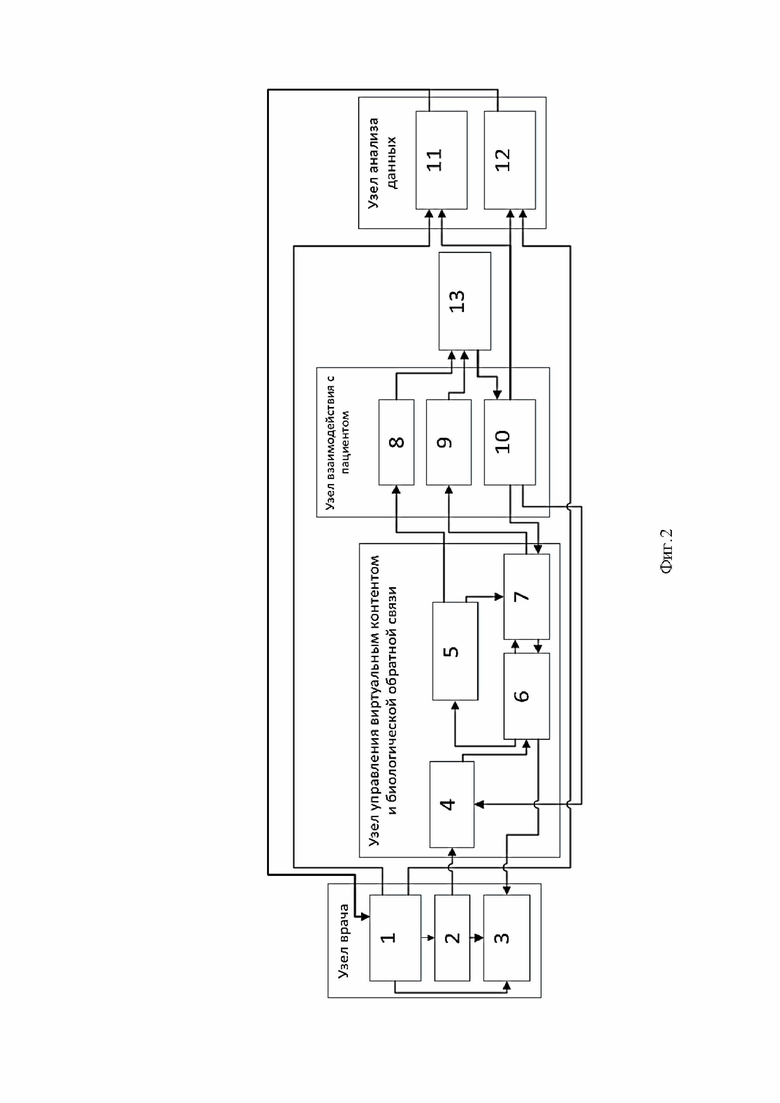
На фиг. 2 приведена блок-схема выполнения реабилитационных процедур.
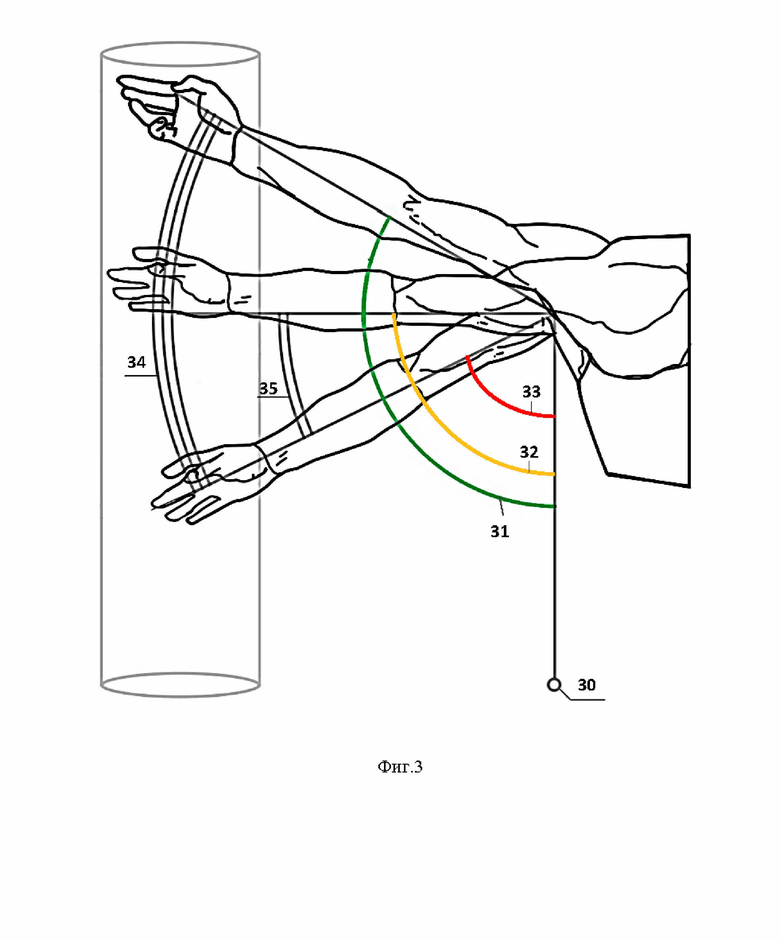
На фиг. 3 условно изображены маршруты выполнения движений, в качестве примера принято отведение руки.
На чертежах показаны блок 1 ввода данных пациента, блок 2 ручной калибровки, блок 3 отображения аудиовизуального контента (далее - АВК) врачу, блок 4 автоматической калибровки, блок 5 формирования АВК, блок 6 обработки данных, блок 7 управления биологической обратной связью (далее - БОС), блок 8 передачи АВК, блок 9 передачи данных БОС, блок 10 регистрации данных, блоки анализа статистических 11 и динамических 12 данных соответственно, пациент 13, электроды, расположенные на передней части правой дельтовидной мышцы 14, задней части правой дельтовидной мышцы 15, передней части левой дельтовидной мышцы 16, задней части левой дельтовидной мышцы 17, левой малой круглой мышце 18, правой малой круглой мышце 19, левых подостной и подлопаточной мышцах 20, правых подостной и подлопаточной мышцах 21, передней части правой трехглавой мышцы плеча 22, задней части правой трехглавой мышцы плеча 23, передней части левой трехглавой мышцы плеча 24, задней части левой трехглавой мышцы плеча 25, передней части правой двуглавой мышцы плеча 26, задней части правой двуглавой мышцы плеча 27, передней части левой двуглавой мышцы плеча 28, задней части левой двуглавой мышцы плеча 29.
Также на чертежах обозначены нижняя начальная точка движения 30 поврежденной верхней конечности, нормативный 31, установленный врачом 32 и фактический 33 маршруты выполнения движения, сравнение 34 фактического 33 и нормативного 31 маршрутов выполнения движения, отклонение 35 фактического 33 и установленного врачом 32 маршрутов выполнения движения.
Электронная вычислительная машина включает три узла, состоящие из следующих блоков:
- узел врача - содержит блок 1 ввода данных пациента, блок 2 ручной калибровки и блок 3 отображения аудиовизуального контента (далее - АВК) врачу;
- узел управления АВК и БОС - содержит блок 4 автоматической калибровки, блок 5 формирования АВК, блок 6 обработки данных, блок 7 управления БОС;
- узел анализа данных - содержит блоки анализа статистических 11 и динамических 12 данных.
Узел взаимодействия с пациентом включает следующие блоки:
- блок 8 передачи АВК - размещен в оборудовании для воспроизведения контента с элементами виртуальной реальности, которое может быть выполнено в виде очков, шлема и т.п. устройств;
- блок 9 передачи данных БОС реализован в виде системы электродов 14-29, с помощью которых осуществляют многоканальную асинхронную локальную чрескожную мышечную электростимуляцию;
- блок 10 регистрации данных - реализован в виде системы захвата движения (предпочтительно беспроводной) с датчиками.
Заявляемый способ осуществляют на стандартном оборудовании в несколько этапов.
1. Отбор пациентов и определение их исходных характеристик.
Для обеспечения безопасности производится отбор пациентов, удовлетворяющие следующим критериям:
Критерии включения пациентов:
- возраст от 18 до 60 лет на момент исследования;
- срок с момента перенесенного инсульта от 3 месяцев до 1,5 лет;
- наличие подписанного информированного согласия;
- уровень мышечного тонуса не более 3 баллов по шкале Ashworth;
- индекс мобильности Рэнкин не более 3 баллов;
- отсутствие грубых когнитивных нарушений.
Критерии не включения пациентов:
- беременность на момент исследования по анамнезу;
- острое сердечно-сосудистое или легочное заболевание, которое является противопоказанием к проведению активной реабилитации;
- мигрень и кластерная головная боль в анамнезе;
- клинически диагностированные судороги в анамнезе (исключением являются фебрильные судороги и судороги, вызванные электрошоковой терапией);
- злоупотребление медикаментами, находящимися на особом контроле, требующего формального лечения;
- использование медикаментов, которые могут снизить судорожный порог (включая, но не ограничиваясь трициклическими антидепрессантами и нейролептическими агентами);
- известная кожная аллергия к адгезивным веществам;
- психические заболевания, в том числе вследствие злоупотребления алкоголем или наркотиками;
- состояния, которые по мнению врача и исследователя могут повлиять на исход лечения (активный неопластический процесс, иммунодефицитное состояние, туберкулез и др.);
- наличие искусственного водителя ритма;
- другие острые противопоказания, выявленные на основании оценки команды исследователей.
Критерии исключения пациентов из реабилитационной процедуры (т.е. основания прекращения применения способа):
- отказ пациента от участия на любом из этапов лечения;
- осложнения, связанные с терапией, приводящие к нарушению режима и сроков лечения, либо нежелательные побочные реакции, не поддающиеся коррекции.
До начала проведения реабилитационных процедур пациент проходит следующие шкалы: Pain detect, Ashworth, HADS, PHQ-9, MMSE/MoCA test, Barthel ADL index, Фугл-мейера.
2. Введение врачом сведений о пациенте и рекомендуемом объеме движений в электронную вычислительную машину.
Врач-реабилитолог вводит персонализированные данные пациента в блок 1 ввода данных пациента, а именно идентификационные данные пациента (рост, вес и прочие).
Далее врач-реабилитолог с помощью блока 2 ручной калибровки проводит персонализированную настройку АВК, а именно вносит данные о состоянии пациента 13 в соответствии с результатами прохождения шкал, полученными на предыдущем этапе, что отражается в изменении рекомендуемого объема движений в различных плоскостях, углах, порядке и перечне реабилитационных упражнений.
3. Подготовка пациента к реабилитационным процедурам.
Под контролем врача-реабилитолога пациент 13 надевает блок 8 передачи АВК, блок 9 передачи данных БОС в виде системы электродов 14-29, размещенных в местах утолщения пораженных мышц верхних конечностей пациента 13 и блок 10 регистрации данных, представляющий собой систему захвата движения.
4. Калибровка системы захвата движения.
Пациенту 13, который находится в положении стоя или сидя, дают в поврежденную руку маркер и с помощью блока 10 регистрации данных, блоком 4 автоматической калибровки, получающим данные о пациенте через блок 2 ручной калибровки, производят автоматическую персонализированную калибровку позиции пациента 13 в АВК, а именно создают новую ось координат таким образом, чтобы ее начало совпало с нижней начальной точкой движения 30 поврежденной верхней конечности и началом координат в системе захвата движения.
5. Подбор врачом протокола реабилитации из базы данных.
На этом этапе врач-реабилитолог вводит данные в блок 2 ручной калибровки и выбирает упражнения для левой и правой руки для включения в программу реабилитации и создания персонализированного протокола реабилитации пациента из следующего перечня:
1) тянуть на себя;
2) толкать от себя;
3) тянуть снизу вверх;
4) разгибание плечевого сустава.
Протокол каждого индивидуального упражнения, выбранного врачом-реабилитологом в блоке 2 ручной калибровки, содержит:
- десять повторов упражнения самостоятельно пациентом, без активации системы электродов 14-29, в процессе которых определяются текущее состояние биомеханики суставов и мышечная активность пациента; длительность выполнения упражнений - 20 минут.
- десять повторов упражнения пациентом с активными электродами 14-29, в процессе которых синхронизированные блоки обработки данных 6, управления БОС 7, регистрации данных 10 отслеживают качество выполнения упражнений и объем движений, корректируя их в соответствии с критериями и областью траекторией движения, установленными врачом-реабилитологом в блоке ручной калибровки; длительность выполнения упражнений - 20 минут.
Общий курс реабилитационных процедур составляет 10-12 дней.
6. Проведение реабилитационных процедур (и организация БОС).
После персонализированной калибровки позиции пациента 13 в АВК и выбора протокола реабилитации из блока 4 автоматической калибровки данные последовательно поступают в блок 6 обработки данных и блок 5 формирования АВК для вывода пациенту 13 АВК через блок 8 передачи АВК.
Аудиовизуальный контент представляет собой релаксирующее пространство, направленное на реализацию сенсорной депривации в целях концентрации пациента на реабилитационной процедуре, в свою очередь аудиовизуальный контент, выполненный на примере виртуальной реальности, позволяет пациентам сразу видеть результаты своих усилий, что оказывает выраженное благотворное влияние на двигательную реабилитацию и мотивирует пережившего инсульт к занятиям.
Пациент параллельно с АВК, воспроизводимым с помощью блока 8 передачи АВК, выполняет движения поврежденной верхней конечностью согласно протоколу реабилитации, выбранному на пятом этапе, при регистрации блоком 10 в виде системы захвата движения в режиме реального времени амплитуды движений в крупных суставах (плечевой, локтевой, лучезапястный), % углового отклонения относительно нижней начальной точки движения 30 поврежденной верхней конечности и длительности выполнения движений.
Блок 5 формирования АВК связан с блоком 7 управления БОС, который управляет системой электродов 14-29 в блоке 9 передачи данных БОС в ходе выполнения реабилитационных процедур, за счет чего организована биологическую обратная связь.
При отклонении 34 движения 33 поврежденной верхней конечности от нормативного маршрута 31 выполнения движения соответствующие данные поступают от пациента 13 через блок 10 регистрации данных (в виде системы захвата движения) в блок 9 передачи данных БОС, с помощью которого осуществляют многоканальную асинхронную локальную чрескожную мышечную электростимуляцию посредством системы электродов 14-29 таким образом, чтобы фактический маршрут 33 движения поврежденной верхней конечности соответствовал установленному врачом 32 маршруту выполнения движения в виде нормативного маршрута 31, скорректированного с учетом рекомендуемого объема движений.
Организация биологической обратной связи начиная со второй реабилитационной процедуры позволяет создать базу для сравнительного анализа и объективно оценить результаты реабилитационных процедур.
Блок 10 регистрации данных направляет данные в блоки анализа статистических 11 и динамических 12 данных, которые получают, обрабатывают и передают стандартизированную информацию о ходе реализации реабилитации в блок 3 отображения АВК врачу, предназначенный для контроля всего процесса реабилитации врачом-реабилитологом.
В процессе выполнения реабилитационных процедур блок 11 анализа статистических данных проводит автоматический персонализированный анализ состояния пациента в целях формирования отчета о качестве и ходе единичного выполнения установленной процедуры и выделяет следующие критерии оценки реабилитации:
1) количество отклонений 35 фактического маршрута 33 движения поврежденной верхней конечности от установленного врачом-реабилитологом 32 маршрута, ед. изм. - кол-во;
2) величина отклонения 35 фактического маршрута 33 движения поврежденной верхней конечности от установленного врачом-реабилитологом 32 маршрута, ед. изм. - метр;
3) длительность выполнения одного упражнения пациентом, ед. изм. - сек.;
4) доля объема движений, выполняемого пациентом в ходе выполнения упражнения, от установленного врачом-реабилитологом маршрута, ед. изм. - %.
В процессе выполнения реабилитационных процедур блок 12 анализа динамических данных проводит автоматический персонализированный анализ состояния пациента на протяжении всех прошедших процедур в целях формирования отчета о качестве и полном ходе реабилитации и выделяет следующие критерии оценки реабилитации:
1) среднее количество отклонений 35 фактического маршрута 33 движения поврежденной верхней конечности от установленного врачом-реабилитологом 32 маршрута, по результатам прохождения полного курса процедур, ед. изм. - кол-во;
2) среднее расстояние отклонения 35 фактического маршрута 33 движения поврежденной верхней конечности от установленного врачом-реабилитологом 32 маршрута, по результатам прохождения полного курса процедур, ед. изм. - метр;
3) средняя длительность выполнения одного упражнения пациентом, по результатам прохождения полного курса процедур, ед. изм. - сек.;
4) доля среднего объема движений, выполняемого пациентом в ходе выполнения упражнений, от установленного врачом-реабилитологом по результатам прохождения полного курса процедур, ед. изм. - %.
Заявляемый способ иллюстрируется следующими клиническими примерами.
Клинический пример 1.
Пациентка С., женщина 1982 г.р., находилась на лечении в условиях дневного стационара поликлиники Центра восстановительной медицины и реабилитации МЦ ДВФУ в период с 14.05.2021 по 05.06.2021 с диагнозом: (I 69.3) последствия острого нарушения мозгового кровообращения в бассейне левой средней мозговой артерии по гемореологическому типу от 21.07.2020 г. Умеренный правосторонний гемипарез. Сенсомоторная афазия. Множественные аневризмы церебральных артерий. Мешотчатая аневризма бифуркации правой средней мозговой артерии. Оперативное лечение 04.12.2015 г.: костно-пластическая лобно-височная трепанация справа, микрохирургическое клипирование мешотчатой аневризмы развилки правой средней мозговой артерии. Милиарная мешотчатая аневризма бифуркации левой средней мозговой артерий. Операция 15.07.2020 г.: ресурсоемкое эндоваскулярное вмешательство: тромбирование мешотчатой аневризмы трифуркации левой средней мозговой артерии с применением потокового стента FRED Jr.
Осложнение: стент-тромбоз потокового стента. Операция 21.07.2020 г.: извлечение потокового стента FRED Jr. из левой средней мозговой артерии. (I63.8) (S36.8) Послеоперационная гематома забрюшинного пространства.
При поступлении: правосторонний гемипарез до плегии в кисти. В проксимальных отделах 3 б, дистальных 0 б. мышечный тонус в руке 4 б, сгибательная контрактура в локтевом и лучезапястном суставе. Френчай 0 б. Самостоятельно не использует руку, поднимает ее только с помощью второй руки.
Получала комплекс лечения: ЛФК, логопедические занятия, механотерапия, реабилитация с использованием биологической обратной связи и элементами виртуальной реальности.
В конце курса лечения: отмечается увеличение объема активных движений в ноге и появление активных движений в руке и кисти. Френчай 2 б. Улучшилась функция баланса и равновесия, ходит самостоятельно без опоры, отмечается положительная динамика речи, возросла толерантность к физическим нагрузкам. Рэнкин 2. Сохраняется ограничение активных движений в правой руке, повышение мышечного тонуса в руке 3 б, ноге 2 б, нарушение опорной функции стопы, речевые нарушения.
Пациентка самостоятельно может себя обслуживать, приспособилась использовать руку для толкания, придерживания предметов, может поправить волосы на голове.
Клинический пример 2.
Пациент Я., мужчина 1968 г.р., находился на лечении в условиях дневного стационара поликлиники Центра восстановительной медицины и реабилитации МЦ ДВФУ в период с 28.01.2021 по 12.02.2021 с диагнозом: (I 69.3) последствия острого нарушения мозгового кровообращения по ишемическому типу от 17.01.21 г. в бассейне правой СМА, ранний восстановительный период левосторонний гемипарез до плегии в руке.
Гипертоническая болезнь 3 ст., риск 4. Дислипидемия. Абдоминально-конституциональное ожирение 3 ст. Хронический холецистит. МКБ.
При поступлении: пациент по специальности капитан. Запрос по реабилитации - самостоятельно держать штурвал. Плегия в левой руке. Активных движений в дистальных отделах нет. В проксимальных - отведение и сгибание в плечевом суставе на 20°. Мышечный тонус повышен в кисти до 1 б. Не может одеть верхнюю одежду без помощи.
Получал комплекс лечения: ЛФК, пассивная механотерапия с БОС, зеркальная терапия, реабилитация с использованием биологической обратной связи и элементами виртуальной реальности.
В конце курса лечения: на фоне проводимых мероприятий отмечает увеличение объема активных движений в левых конечностях, значительно улучшилась функция баланса и равновесия, ходит самостоятельно без опоры, улучшилась опорная функция левой ноги, возросла толерантность к физическим нагрузкам, улучшился эмоциональный фон, уменьшилась боль в плечевом суставе ВАШ 2 б. Появились активные движения в кисти, возможны глобальные движения - захват крупных предметов за счет увеличения движений в плечевом суставе и локте. Обслуживает себя самостоятельно полностью. Френчай 4 б. Рэнкин 2. Сохраняется нарушение тонких движений в кисти, парез стопы.
Клинический пример 3.
Пациент А, мужчина 2004 г.р., находился на лечении в условиях дневного стационара поликлиники Центра восстановительной медицины и реабилитации МЦ ДВФУ в период с 03.02.2020 по 18.02.2020 с диагнозом: (I63.3) последствия ишемического инсульта в бассейне ПМА, СМА справа от 03.01.2020 г. с образованием очага инфаркта в височно-лобно-теменной области, с распространением на базальные ядра. Неуточненный подтип. Ранний восстановительный период. Левосторонний гемипарез, до плегии в руке. Левосторонний прозопарез.
При поступлении: левосторонний гемипарез. В ноге сила 3 б, в руке 2 б в проксимальном отделе, 0 б в кисти. Мышечный тонус в мышцах ноги по Эшфорт 1 б, в кисти 2 б.
Амплитуда активных движений в плечевом суставе: резко выраженное ограничение: сгибание (отведение плача вперед - 20°; разгибание (отведение назад) - 0°; отведение плеча в сторону - 10°. Амплитуда активных движений в локтевом суставе: значительно выраженное: сгибание - 90°; разгибание - 140°.
Получал комплекс лечения: ЛФК, пассивная велоэргометрия, реабилитация с использованием биологической обратной связи и элементами виртуальной реальности.
В конце курса лечения: левосторонний гемипарез. В ноге сила 5 б, в руке 3 б в проксимальном отделе, 0 б в кисти. Мышечный тонус в мышцах ноги по Эшфорт 1 б, в кисти 1 б.
Амплитуда активных движений в плечевом суставе: значительно выраженное ограничение: сгибание (отведение плеча вперед - 75°; разгибание (отведение назад) - 5°; отведение плеча в сторону - 50°. Амплитуда активных движений в локтевом суставе: умеренно выраженное: сгибание - 40°; разгибание - 150°. Активные движения в лучезапястном суставе и кисти отсутствуют.
Повтор реабилитационных процедур через 1,5 мес.: ЛФК, реабилитация с использованием биологической обратной связи и элементами виртуальной реальности. Курс составил 10 процедур.
Левосторонний гемипарез. В ноге сила 5 б, в руке 4 б в проксимальном отделе, 1 б в кисти. Мышечный тонус в мышцах ноги по Эшфорт 1 б, в кисти 1 б.
Амплитуда активных движений в плечевом суставе: сгибание (отведение плеча вперед - 160°; разгибание (отведение назад) - 15°; отведение плеча в сторону - 150°. Амплитуда активных движений в локтевом суставе: сгибание - 110°; разгибание - полное. Активные движения в лучезапястном суставе: сгибание - 55°; разгибание - 5°. Кисти отсутствуют.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ повышения эффективности восстановления двигательных функций человека с использованием метода визуального контроля движений в тренажере на основе технологий виртуальной реальности | 2020 |
|
RU2760484C1 |
| Способ комплексной медицинской реабилитации пациентов после реконструктивных операций по поводу переломов костей нижних конечностей на основе технологии виртуальной реальности с БОС | 2024 |
|
RU2831885C1 |
| Способ реабилитации пациентов после хирургического лечения перелома проксимального отдела бедренной кости на фоне остеопороза | 2020 |
|
RU2740262C1 |
| Способ реабилитации пациентов при повреждении головного и спинного мозга с использованием виртуальной реальности и биологической обратной связи | 2022 |
|
RU2805120C2 |
| Способ лечения и профилактики болей в спине методом изометрической БОС-тренировки пациентов после эндопротезирования суставов нижних конечностей | 2020 |
|
RU2758631C1 |
| Способ мультимодальной коррекции двигательных и когнитивных нарушений у пациентов, перенесших ишемический инсульт | 2023 |
|
RU2813807C1 |
| Способ реабилитации пациентов после операции эндопротезирования тазобедренного сустава по поводу коксартроза | 2023 |
|
RU2806494C1 |
| Способ лечения пациентов с остеопорозом, осложненным переломом дистального отдела предплечья | 2020 |
|
RU2734285C1 |
| Способ реабилитации пациентов, перенесших новую коронавирусную инфекцию COVID-19 | 2022 |
|
RU2782499C1 |
| Способ реабилитации детей с нарушением мелкой моторики верхних конечностей | 2022 |
|
RU2781417C1 |

Изобретение относится к медицине, а именно к способу реабилитации верхних конечностей пациентов, перенесших инсульт, с использованием биологической обратной связи и элементами виртуальной реальности. При исполнении способа пациента оснащают оборудованием для воспроизведения контента с элементами виртуальной реальности и системой захвата движения с датчиками. Загружают программный комплекс, содержащий элементы формирования контента с элементами виртуальной реальности и элементы управления. Затем пациент параллельно с воспроизводимым контентом с элементами виртуальной реальности выполняет движения поврежденной частью тела при регистрации амплитуды движений и длительности их выполнения и организации биологической обратной связи. При этом пациента дополнительно оснащают системой электродов. Используют программный комплекс, содержащий нормативный маршрут выполнения движений, описанных в базе данных протоколов реабилитации и функционально объединяющего систему электродов, оборудование для воспроизведения контента с элементами виртуальной реальности, систему захвата движения и электронную вычислительную машину для их управления, а также ввода и обработки информации. При этом врач вводит сведения о рекомендуемом объеме движений в электронную вычислительную машину. Затем пациента оснащают оборудованием для воспроизведения контента с элементами виртуальной реальности, системой захвата движения с датчиками и системой электродов. Производят калибровку системы захвата движения, при которой с помощью маркера регистрируют положение нижней начальной точки движения поврежденной верхней конечности, которая также является началом координат в системе захвата движения. Врач подбирает протокол реабилитации из базы данных и при реабилитационных процедурах пациент параллельно с воспроизводимым контентом с элементами виртуальной реальности выполняет движения поврежденной верхней конечностью согласно протоколу реабилитации при регистрации системой захвата движения в режиме реального времени амплитуды движений в крупных суставах, % углового отклонения относительно нижней начальной точки движения поврежденной верхней конечности и длительности выполнения движений. При этом биологическую обратную связь организуют начиная со второй реабилитационной процедуры, когда в случае отклонения движения поврежденной верхней конечности от нормативного маршрута выполнения движения осуществляют многоканальную асинхронную локальную чрескожную мышечную электростимуляцию посредством системы электродов таким образом, чтобы фактический маршрут движения поврежденной верхней конечности соответствовал установленному врачом маршруту выполнения движения в виде нормативного маршрута, скорректированного с учетом рекомендуемого объема движений. Обеспечивается повышение эффективности реабилитационных процедур за счет организации автоматической, стабильной и объективной биологической обратной связи, которая не полностью управляет двигательной активностью пациента, а только корректирует объем и характер движений, использования программного комплекса, который позволяет врачу самостоятельно настраивать комплекс и порядок реабилитационных процедур, в том числе и производить персонализированную настройку, а также вносить изменения в ход реабилитационных процедур и протоколы реабилитации. 3 з.п. ф-лы, 3 ил.
1. Способ реабилитации верхних конечностей пациентов, перенесших инсульт, с использованием биологической обратной связи и элементами виртуальной реальности, при котором пациента оснащают оборудованием для воспроизведения контента с элементами виртуальной реальности и системой захвата движения с датчиками, загружают программный комплекс, содержащий элементы формирования контента с элементами виртуальной реальности и элементы управления, далее пациент параллельно с воспроизводимым контентом с элементами виртуальной реальности выполняет движения поврежденной частью тела при регистрации амплитуды движений и длительности их выполнения и организации биологической обратной связи, отличающийся тем, что пациента дополнительно оснащают системой электродов, используют программный комплекс, содержащий нормативный маршрут выполнения движений, описанных в базе данных протоколов реабилитации и функционально объединяющего систему электродов, оборудование для воспроизведения контента с элементами виртуальной реальности, систему захвата движения и электронную вычислительную машину для их управления, а также ввода и обработки информации, причем врач вводит сведения о рекомендуемом объеме движений в электронную вычислительную машину, после чего пациента оснащают оборудованием для воспроизведения контента с элементами виртуальной реальности, системой захвата движения с датчиками и системой электродов, далее производят калибровку системы захвата движения, при которой с помощью маркера регистрируют положение нижней начальной точки движения поврежденной верхней конечности, которая также является началом координат в системе захвата движения, врач подбирает протокол реабилитации из базы данных и при реабилитационных процедурах пациент параллельно с воспроизводимым контентом с элементами виртуальной реальности выполняет движения поврежденной верхней конечностью согласно протоколу реабилитации при регистрации системой захвата движения в режиме реального времени амплитуды движений в крупных суставах, % углового отклонения относительно нижней начальной точки движения поврежденной верхней конечности и длительности выполнения движений, при этом биологическую обратную связь организуют начиная со второй реабилитационной процедуры, когда в случае отклонения движения поврежденной верхней конечности от нормативного маршрута выполнения движения осуществляют многоканальную асинхронную локальную чрескожную мышечную электростимуляцию посредством системы электродов таким образом, чтобы фактический маршрут движения поврежденной верхней конечности соответствовал установленному врачом маршруту выполнения движения в виде нормативного маршрута, скорректированного с учетом рекомендуемого объема движений.
2. Способ реабилитации по п.1, отличающийся тем, что при калибровке системы захвата движения пациент находится в положении стоя.
3. Способ реабилитации по п.1, отличающийся тем, что при калибровке системы захвата движения пациент находится в положении сидя.
4. Способ реабилитации по п.1, отличающийся тем, что на этапе калибровки системы захвата движения врач дополнительно корректирует сведения о рекомендуемом объеме движений.
| СПОСОБ РЕАБИЛИТАЦИИ БОЛЬНЫХ В ОСТРОЙ СТАДИИ ИНСУЛЬТА С ИСПОЛЬЗОВАНИЕМ БИОЛОГИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ И ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2010 |
|
RU2432971C1 |
| Система нейрореабилитации и способ нейрореабилитации | 2020 |
|
RU2741215C1 |
| Способ реабилитации больных в различных стадиях нарушений центральной или периферической нервной системы с использованием виртуальной реальности | 2016 |
|
RU2655200C1 |
| US 10639235 B2, 05.05.2020 | |||
| US 20160235323 A1, 18.08.2016. | |||

