Изобретение относится к метеорологии, к способам для определения физических параметров атмосферы, и позволяет получать информацию о высоте, скорости и направлении движения нижней границы облачности (НГО).
Известен способ измерения высоты нижней границы облаков посредством измерителя [1], заключающийся в наблюдении пятна света, образованного на основании облака направленным вертикально вверх лучом прожектора, причем прожектор и фотоприемник разнесены на известное расстояние, а их оптические оси расположены в одной вертикальной плоскости. Недостатками этого способа являются малый ресурс работы источника световых импульсов измерителя, невысокая точность получаемых данных и невозможность проведения измерений в условиях солнечной засветки и несплошной облачности.
Известны также светолокационные способы измерения высоты нижней границы облаков, по которым в измерителях в качестве источника световых импульсов используется твердотельные лазеры [2, 3]. Недостатками этого способа являются ограниченный ресурс работы твердотельного лазера, высокая стоимость изготовления и эксплуатации измерителя.
Кроме этого недостатками способов по [1, 2, 3] являются большие габариты и значительная потребляемая мощность измерителей, а также наличие активного излучателя.
Наиболее близким техническим решением к данному изобретению является принятый за прототип способ, который реализует система [4], предназначенная для пассивного определения координат источника излучения (горизонтального угла, угла возвышения и расстояния) посредством двух телевизионных ПЗС-камер. Камеры в системе [4] располагаются на одной общей вертикальной оси, вокруг которой они могут синхронно вращаться, и на известном друг от друга расстоянии таким образом, что их оптические оси всегда находятся в одной вертикальной плоскости. При этом расстояние определяется методом триангуляции по получаемым с каждой из камер углам видимого смещения источника излучения. Недостатком этого способа является наличие механических вертикальных и горизонтальных поворотных устройств и, как следствие, низкая точность измерения вертикальных и горизонтальных углов оптических осей ПЗС-камер.
Задачей, на решение которой направлено данное изобретение, является исключение влияния механических перемещений фотоприемников на точность измерений вертикальных и горизонтальных углов их оптических осей.
Технический результат - повышение достоверности и точности измерений и расширение функциональных возможностей метеорологических наблюдений.
Указанный технический результат при осуществлении изобретения достигается тем, что в известном способе посредством двух матричных фотоприемников, имеющих регулярную структуру положения пикселей и расположенных на известном расстоянии друг от друга таким образом, что их оптические оси лежат в одной вертикальной плоскости и углы обзора перекрываются, регистрируют одновременно источник излучения и, по измеренным вертикальным и горизонтальным углам оптических осей фотоприемников и углам видимого смещения источника излучения относительно оптических осей фотоприемников, методом триангуляции определяют расстояние до него.
В отличие от известного в предлагаемом способе неподвижные матричные фотоприемники располагают таким образом, что их оптические оси имеют известные неизменяемые вертикальные и горизонтальные углы, а углы обзора фотоприемников перекрываются в одной вертикальной плоскости на определенной высоте между ними, и для определения высоты нижней границы облачности используют три угловые координаты видимого смещения участка нижней границы облачности относительно оптических осей фотоприемников. Скорость и направление движения нижней границы облачности определяют путем сопоставления положения участка нижней границы облачности в текущий и предыдущий моменты измерения высоты нижней границы облачности, произведенные через известный промежуток времени.
Сравнение заявляемого способа с прототипом позволило установить соответствие их условию "новизна". При сравнении заявляемого способа с другими известными техническими решениями не выявлены сходные признаки, что позволяет сделать вывод о соответствии условию "изобретательский уровень".
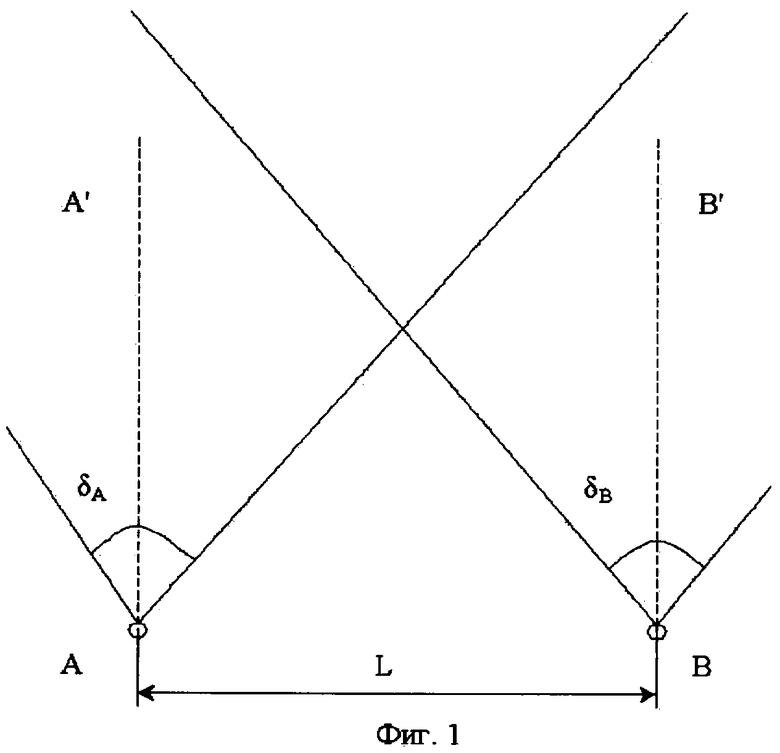
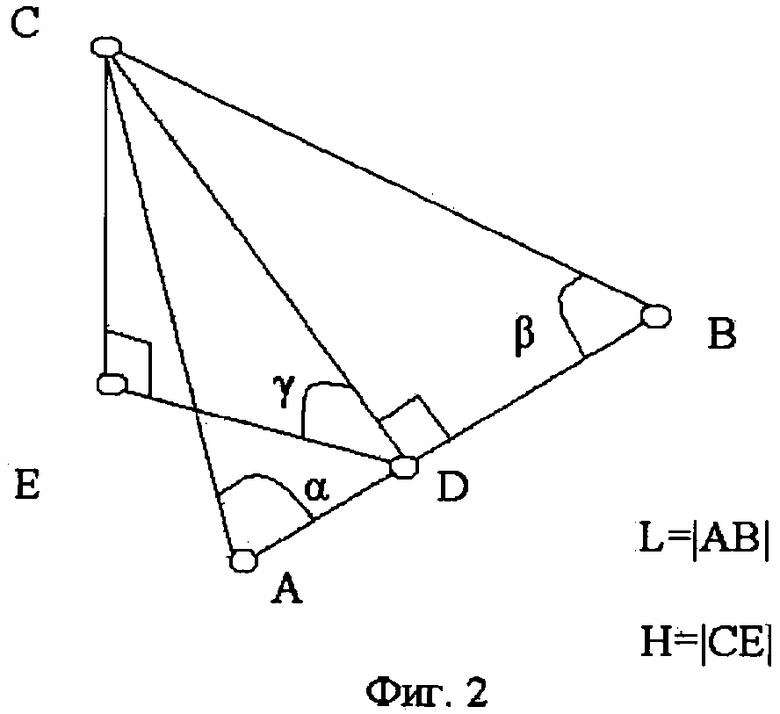
Способ поясняется чертежами. На фиг.1 приведена схема расстановки оптических приемников; на фиг.2 приведена схема реализации способа измерения высоты НГО; на фиг.3 приведена схема реализации способа измерения скорости и направления движения НГО.
Пример. На известном друг от друга расстоянии L располагают матричные фотоприемники А и В таким образом, чтобы их оптические оси АА′ и ВВ′ находились в одной вертикальной плоскости, а углы обзора δА и δВ имели пространственное перекрытие на определенной высоте между ними (фиг.1).
В определенный момент времени ti-1 производится измерение трех угловых координат участка нижней границы облачности С: α - для приемника А, β - для приемника В и γ - для обоих приемников (фиг.2). При этом высота Н вычисляется по следующей формуле:

Одновременно с вычислением высоты Н определяются координаты xi-1 и yi-1 точки С.
В следующий дискретный момент времени ti производится повторное измерение высоты Н и определение координат xi и yi точки С (фиг.3). Зная интервал времени между измерениями Δt=ti-ti-1 и разность координат Δх=хi-xi-1 и Δy=yi-yi-1, определяются составляющие скорости Vx и Vy, и затем скорость V

и направление движения НГО ϕ

Таким образом, предлагаемый способ позволяет получать информацию о высоте, скорости и направлении движения нижней границы облачности. Преимущество изобретения состоит в том, что точность измерения высоты нижней границы облачности повышается за счет использования неподвижных фотоприемников с заранее известными значениями вертикальных и горизонтальных углов их оптических осей, при этом появляется возможность определения направления и скорости движения нижней границы облачности.
Использованные источники
1. Авторское свидетельство СССР №598390, МПК G01С 3/06, G01S 9/62, на изобретение "Измеритель высоты нижней границы облаков".
2. Патент РФ №2136016, МПК G01S 17/95, G01W 1/00, на изобретение "Светолокационный измеритель высоты нижней границы облаков".
3. Рекламный каталог фирмы Vaisala, Финляндия, Ceilometr CL31.
4. Европейский патент №ЕР0379425, МПК G01С 3/18, G01S 11/12, на изобретение "System for determing the position of at least one target by means of triangulation".
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ НИЖНЕЙ ГРАНИЦЫ ОБЛАЧНОСТИ | 2011 |
|
RU2497159C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ И СКОРОСТИ ДВИЖЕНИЯ НИЖНЕЙ ГРАНИЦЫ ОБЛАЧНОСТИ | 2009 |
|
RU2414728C2 |
| МОНОСТАТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ НИЖНЕЙ ГРАНИЦЫ ОБЛАЧНОСТИ | 2008 |
|
RU2377612C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ОБЛАЧНОСТИ | 2014 |
|
RU2583877C2 |
| СПОСОБ И СИСТЕМА ДАЛЬНЕГО ОПТИЧЕСКОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТЯЩЕГО В СТРАТОСФЕРЕ ИЛИ НА БОЛЬШОЙ ВЫСОТЕ СО СВЕРХЗВУКОВОЙ СКОРОСТЬЮ ОБЪЕКТА ПО КРИТЕРИЯМ КОНДЕНСАЦИОННОГО СЛЕДА ЕГО СИЛОВОЙ УСТАНОВКИ В АТМОСФЕРЕ | 2012 |
|
RU2536769C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ОБЛАЧНОСТИ (ВАРИАНТЫ) | 2014 |
|
RU2583954C2 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ | 2012 |
|
RU2519269C1 |
| СПОСОБ ОБЛАЧНОЙ ТРИАНГУЛЯЦИИ ТОЛЩИНЫ ГОРЯЧЕГО ПРОКАТА | 2014 |
|
RU2574864C1 |
| Измеритель высоты нижней границы облаков | 1980 |
|
SU943624A1 |
| Моноскопический способ определения высоты нижней границы облачности | 2021 |
|
RU2779612C1 |
Изобретение относится к метеорологии и позволяет определять высоту, скорость и направление движения. Сущность изобретения: определение высоты нижней границы облачности производится методом триангуляции посредством определения трех угловых координат видимого смещения участка нижней границы облачности относительно оптических осей двух неподвижных матричных фотоприемников, имеющих регулярную структуру положения пикселей и расположенных на известном расстоянии друг от друга таким образом, что их оптические оси имеют известные вертикальные и горизонтальные углы и лежат в одной вертикальной плоскости, а углы обзора перекрываются на определенной высоте между ними. Скорость и направление движения нижней границы облачности определяют путем сопоставления положения одного и того же участка нижней границы облачности в текущий и предыдущий моменты измерения высоты нижней границы облачности, произведенные через известный промежуток времени. Технический результат - повышение достоверности и точности измерений и расширение функциональных возможностей метеорологических наблюдений. 3 ил.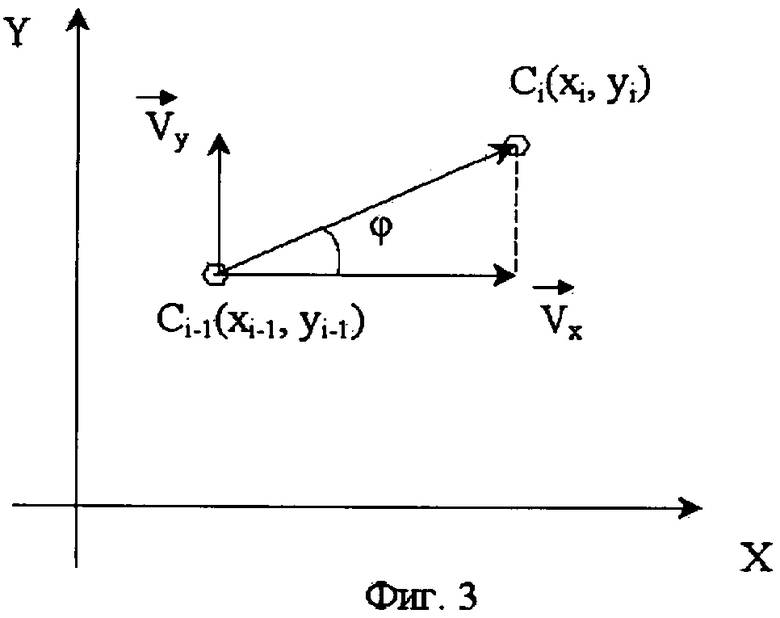
Способ определения высоты, скорости и направления движения нижней границы облачности в дискретные моменты времени, по которому, посредством двух матричных фотоприемников, имеющих регулярную структуру положения пикселей и расположенных на известном расстоянии друг от друга таким образом, что их оптические оси лежат в одной вертикальной плоскости и углы обзора перекрываются, регистрируют одновременно источник излучения и по измеренным вертикальным и горизонтальным углам оптических осей фотоприемников и углам видимого смещения источника излучения относительно оптических осей фотоприемников методом триангуляции определяют расстояние до него, отличающийся тем, что неподвижные матричные фотоприемники располагают таким образом, что их оптические оси имеют известные неизменяемые вертикальные и горизонтальные углы, а углы обзора фотоприемников перекрываются в одной вертикальной плоскости на определенной высоте между ними, и для определения высоты нижней границы облачности используют три угловые координаты видимого смещения участка нижней границы облачности относительно оптических осей фотоприемников, а скорость и направление движения определяют путем сопоставления положения участка нижней границы облачности в текущий и предыдущий моменты измерения высоты нижней границы облачности, произведенные через известный промежуток времени.
| СПОСОБ ОБНАРУЖЕНИЯ ОБЛАЧНЫХ СЛОЕВ И ОПРЕДЕЛЕНИЯ ВЫСОТЫ ИХ НИЖНЕЙ ГРАНИЦЫ | 1997 |
|
RU2154289C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЫСОТЫ НИЖНЕЙ ГРАНИЦЫ ОБЛАКОВ | 0 |
|
SU340992A1 |
| Устройство для измерения и регистрации высоты нижней границы облаков | 1959 |
|
SU126649A1 |
| Светолокационный измеритель высоты нижней границы облаков | 1975 |
|
SU563658A1 |

