Изобретение относится к электротехнике, а именно к вращающимся электрическим машинам, и может быть использована в составе электроприводов, работающих в двигательном и генераторном режимах, например, в робототехнических и мехатронных системах, мобильных платформах, а также в промышленной автоматике.
ОПИСАНИЕ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
Наиболее близкой по технической сущности к изобретению является патентная заявка US 2015/0200576 A1, в которой описана бесколлекторная электрическая машина, содержащая в своем составе печатную плату с двумя электрическими схемами и установленными на ней датчиками положения ротора. Первая электрическая схема образует соединения для подключения датчиков положения ротора, например, на основе эффекта Холла, вторая электрическая схема соединяет в заданной последовательности катушки статора. Датчики Холла установлены на печатной плате таким образом, что они обращены внутрь статора и попадают в пазы между его зубцами. Выводы датчиков Холла паяются в отверстия. Подключение проводов, питающих фазы двигателя также осуществляется пайкой в отверстия на печатной плате.
К недостаткам данного изобретения можно отнести невозможность точной настройки положения датчиков Холла на полностью собранной вращающейся электрической машине, так как датчики обращены внутрь статора и закрываются несъемной печатной платой с впаянными в нее катушками статора, необходимость установки датчиков Холла до окончательной сборки электрической машины, что неоправданно удорожает ее стоимость в случае, если потребитель использует иные внешние датчики положения ротора, необходимость пайки питающих фазы внешних проводов заранее фиксированной длины в отверстия печатной платы до окончательной установки печатной платы на статор, так как после окончательной установки печатной платы на статор область пайки оказывается недоступной.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Технический результат данного изобретения заключается в улучшении нагрузочной способности электрической машины, повышении удобства ее настройки и подключения.
Увеличение нагрузочной способности электрической машины достигается улучшением теплоотвода от выделяющих тепло статорных обмоток за счет применения в конструкции электрической машины теплопроводного компаунда, предпочтительно, с тепловодностью не менее 0,5 Вт/м⋅К, уменьшающего тепловое сопротивление между статорными обмотками, магнитопроводом статора и внешним по отношению к электрической машине теплоотводящим корпусом. Для увеличения теплопроводности компаунда в его состав могут добавляться теплопроводные наполнители, например, порошок оксида алюминия или нитрида бора.
Повышение удобства настройки и подключения электрической машины достигается применением в ее составе печатной платы с количеством проводящих слоев от 1 до 32, содержащей минимум две электрические схемы, первая для соединения установленных на печатной плате датчиков положения ротора, например, на эффекте Холла или магниторезистивного типа, вторая для соединения катушек или катушечных групп статора в соответствии с принципиальной электрической схемой статора. Третья и последующие электрические схемы, входящие в состав названной печатной платы, могут быть использованы для включения датчиков температуры, которые могут устанавливаться в статор. Печатная плата фиксируется на залитых теплопроводным компаундом катушках статора при помощи клея или компаунда.
Возможно исполнение указанной бескорпусной вращающейся электрической машины без датчиков положения ротора или без датчиков температуры, или без всех названных элементов.
На указанную печатную плату датчики положения ротора устанавливаются методом пайки поверхностным монтажом на ламели печатной платы или в отверстия печатной платы, которая может быть осуществлена в любой момент, в том числе на полностью собранной электрической машине. Гибкие выводы датчиков положения ротора формуются с образованием петли таким образом, что после пайки выводов на печатную плату за счет их гибкости сохраняется возможность смещения чувствительного элемента датчика положения ротора в любом направлении. Тем самым достигается возможность настройки датчиков положения ротора электрической машины. После настройки датчиков положения ротора посредством клея или компаунда осуществляется их окончательная фиксация, препятствующая их смещению относительно выбранного положения.
Ротор для варианта исполнения бескорпусной вращающейся электрической машины с установленными датчиками положения ротора удлиняется на высоту, примерно равную высоте датчиков положения ротора.
Соединение цепей бескорпусной вращающейся электрической машины, включая фазные цепи, цепи датчиков температуры и датчиков положения ротора, с внешней по отношению к ней системой управления или контроллером осуществляется посредством пайки соединительных проводов на штырьковые лепестки, установленные на печатной плате. Количество штырьковых лепестков, предпочтительно, соответствует количеству электрических цепей, необходимых для подключения бескорпусной вращающейся электрической машины к контроллеру или системе управления.
Указанные штырьковые лепестки устанавливаются на печатную плату методом запрессовки или пайки. Альтернативный вариант установки состоит в запрессовке штырьковых лепестков на печатную плату с последующей пайкой. Для увеличения надежности соединения возможна накрутка соединительных проводов на штырьковые лепестки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Признаки и преимущества, а также техническое и промышленное назначение типовых вариантов осуществления настоящего изобретения описаны ниже со ссылками на прилагаемые чертежи.
Фиг. 1 представляет собой вид, на котором показана бескорпусная синхронная вращающаяся электрическая машина с установленными датчиками положения ротора.
Фиг. 2 представляет собой вид, на котором показана бескорпусная синхронная вращающаяся электрическая машина без датчиков положения ротора.
Фиг. 3 представляет собой вид, на котором показан статор бескорпусной синхронной вращающейся электрической машины с датчиками положения ротора.
Фиг. 4 представляет собой вид, на котором показано изображение в аксиальном направлении бескорпусной синхронной вращающейся электрической машины до заливки обмоток компаундом и установки печатной платы.
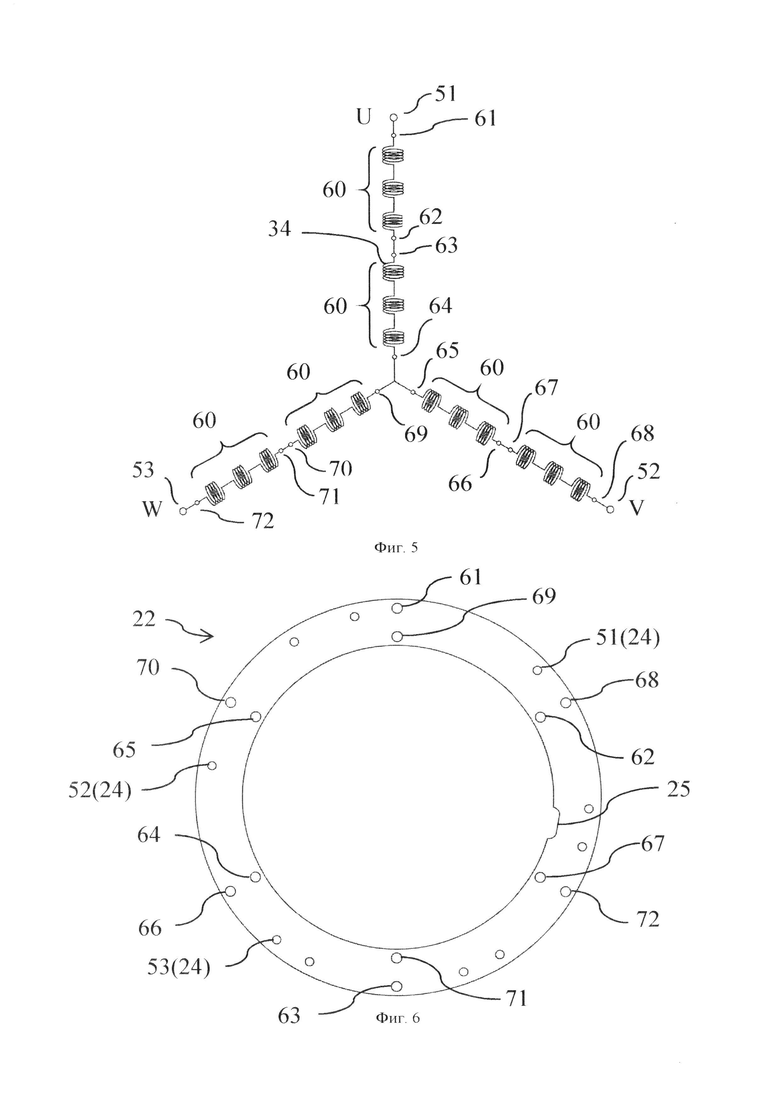
Фиг. 5 представляет собой вид, на котором приведена принципиальная электрическая схема статора бескорпусной синхронной вращающейся электрической машины в соответствии с примером осуществления настоящего изобретения.
Фиг. 6 представляет собой вид, на котором показан контур печатной платы бескорпусной синхронной вращающейся электрической машины с отверстиями для монтажа штырьковых лепестков и выводов катушек или групп катушек статора.
Фиг. 7 представляет собой вид, на котором показан способ монтажа выводов датчиков температуры.
Фиг. 8 представляет собой вид, на котором показан способ установки датчиков положения ротора на печатную плату.
Фиг. 9 представляет собой вид, на котором показан ротор бескорпусной синхронной вращающейся электрической машины для исполнения с установленными датчиками положения ротора.
Фиг. 10 представляет собой вид, на котором показан ротор бескорпусной синхронной вращающейся электрической машины для исполнения без установленных датчиков положения ротора.
Фиг. 11 представляет собой вид, на котором показан способ установки штырьковых лепестков на печатную плату.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Типовые варианты осуществления настоящего изобретения описаны подробно со ссылкой на прилагаемые чертежи. В приведенном ниже описании приведена конструкция синхронной вращающейся электрической машины для мобильных платформ, промышленной автоматики, робототехнических и мехатронных систем, однако, это всего лишь пример для описания. Одинаковые элементы обозначены одинаковыми ссылочными позициями, а избыточные элементы опущены.
Форма, количество зубцов статора, количество магнитов ротора, количество штырьковых лепестков, количество и тип датчиков положения ротора, количество датчиков температуры, количество слоев печатной платы являются лишь примером для описания и могут быть соответствующим образом модифицированы, чтобы соответствовать характеристикам бескорпусной синхронной вращающейся электрической машины.
Способ соединения катушек и групп катушек статора также является лишь примером для описания и может быть соответствующим образом модифицирован, в зависимости от характеристик бескорпусной синхронной вращающейся электрической машины. К иным возможным вариантам включения катушек и групп катушек статора можно отнести их последовательное, параллельное или последовательно-параллельное соединение, образующее одинарно или параллельно включенные звезды или треугольники.
Фиг. 1 представляет собой изображение бескорпусной синхронной вращающейся электрической машины 10 в исполнении с датчиками положения ротора 23, состоящей из статора 30, представленного на Фиг. 3 и Фиг. 4, и ротора 20 в форме цилиндра, представленного на Фиг. 9, который расположен на заранее заданном расстоянии в радиальном направлении от статора.
Фиг. 2 представляет собой изображение бескорпусной синхронной вращающейся электрической машины 11 в исполнении без датчиков положения ротора, состоящей из ротора 21 и статора 31, отличающейся от бескорпусной синхронной вращающейся электрической машины 10 только отсутствием названных датчиков положения ротора и длиной ротора 21. При этом датчики положения ротора могут быть установлены на печатную плату 22 без разборки конструкции бескорпусной синхронной вращающейся электрической машины 11, в частности, без снятия печатной платы 22. На Фиг. 10 представлено изображение ротора 21, применяемого совместно со статором 11.
Фиг. 3 и Фиг. 4 представляют собой изображение статора 30, состоящего из магнитопровода статора 33, включающего восемнадцать зубцов, а также компаунда 32, катушек 34, печатной платы 22, датчиков положения ротора 23, штырьковых лепестков 24, датчика температуры 25 и других элементов. Катушки статора намотаны каждая на своем зубце и образуют известную из уровня техники двухрядную концентрированную обмотку статора. Изображение на Фиг. 4 в равной мере относится к статору 30 и статору 31.
Фиг. 5 представляет собой изображение принципиальной электрической схемы обмотки статоров 30 и 31 бескорпусной синхронной вращающейся электрической машины 10 и 11 в виде звезды. Катушки 34 объединены в шесть групп 60 по три катушки в каждой группе. Катушки 34 в каждой группе 60 соединены последовательно и намотаны одним проводом одножильным или многожильным проводом, например, литцендратом, без разрывов. Выводы 61-72 групп 60 катушек впаяны в печатную плату 22, несущую печатные проводники и образующую заданную схему включения. Питание фаз U, V, W осуществляется через выводы фаз 51-53.
Фиг. 6 представляет собой изображение контура печатной платы 22 с показанными на ней отверстиями для установки штырьковых лепестков 24 питания фаз 51-53 и отверстиями для пайки выводов 61-72 групп 60 катушек статора. Печатная плата имеет два внутренних и два внешних металлизированных слоя и фиксируется на катушках статора, залитых теплопроводным компаундом, клеем или компаундом.
Фиг. 7 представляет собой изображение способа установки датчика температуры 25 в статор 30 или в статор 31. Датчик температуры 25 устанавливается между катушками 34 статора и заливается вместе с катушками 34 статора компаундом 32. Выводы указанного датчика температуры паяются на ламели на печатной плате 22 и соединяются печатным монтажом со штырьковыми лепестками 24. В печатной плате 22 предусмотрен паз 26 для монтажа выводов датчика температуры 25.
Фиг. 8 представляет собой изображение способа установки датчика положения ротора 23 на печатную плату 22. Выводы 27 датчика положения ротора 23 формуются с образованием петли и соединяются с печатной платой 22 методом пайки, обеспечивая возможность настройки датчиков положения ротора 23 путем их смещения в любом направлении. После настройки всех датчиков положения ротора 23 они фиксируются на печатной плате 22 клеем или компаундом 28.
Фиг. 9 представляет собой изображение ротора 20 бескорпусной синхронной вращающейся электрической машины 10, состоящего из магнитопровода 41 и закрепленных на нем двадцати магнитов 42 чередующейся полярности. Ротор 20 выступает за пределы статора 30 на величину, примерно равную высоте датчиков положения ротора 23, как показано на Фиг. 1.
Фиг. 10 представляет собой изображение ротора 21 бескорпусной синхронной вращающейся электрической машины 11, состоящего из магнитопровода 43 и закрепленных на нем двадцати магнитов 44 чередующейся полярности.
Фиг. 11 представляет собой изображение способа установки штырьковых лепестков 24 на печатную плату 22. Штырьковые лепестки 24 прессуются в отверстия печатной платы 22 или устанавливаются на печатную плату методом пайки или одновременно прессуются и пропаиваются. Предпочтительно, чтобы пайка штырькового лепестка на печатную плату сопровождалась образованием у его основания галтели 29 из припоя в виде конуса. Штырьковые лепестки 24 могут быть изготовлены, например, из медной или латунной проволоки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бескорпусная синхронная вращающаяся электрическая машина с индукционным датчиком углового положения | 2022 |
|
RU2779627C1 |
| Интегрируемая электрическая машина со съемной системой контроля параметров | 2024 |
|
RU2840962C1 |
| Индукционный датчик положения с активной подвижной частью | 2022 |
|
RU2782151C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ПЕРЕКЛЮЧАЕМЫМИ ФАЗНЫМИ ОБМОТКАМИ | 2018 |
|
RU2698464C1 |
| МОДУЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2012 |
|
RU2510121C2 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА СО ВСТРОЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2018 |
|
RU2689380C1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ МОМЕНТНЫЙ ТОРЦЕВОЙ ДВИГАТЕЛЬ ВОЛЕГОВА В.Е. | 1998 |
|
RU2141158C1 |
| Электрическая машина (варианты) | 2019 |
|
RU2703992C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА СО ВСТРОЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2017 |
|
RU2656866C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ЭЛЕКТРОПРИВОДА ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ РЕГУЛИРУЮЩЕГО ОРГАНА | 2018 |
|
RU2693935C1 |





Изобретение относится к электротехнике и может быть использовано в составе электроприводов. Техническим результатом является улучшение нагрузочной способности электрической машины, повышение удобства настройки и подключения. Бескорпусная синхронная вращающаяся электрическая машина содержит статор и ротор. Ротор выполнен в виде магнитопровода из материала с высокой магнитной проницаемостью, закрепленного с возможностью вращения относительно статора и несущего магниты. Статор имеет в своем составе обмотку, залитую компаундом с теплопроводным наполнителем, печатную плату, магнитопровод, датчики температуры и датчики положения ротора. Печатная плата соединяет катушки статора в соответствии с принципиальной электрической схемой, соединяет датчики положения ротора, установленные на плату и зафиксированные на ней клеем или компаундом, а также служит для подключения датчиков температуры. Подключение электрической машины к внешней системе управления осуществляется посредством штырьковых лепестков, запрессованных и пропаянных на печатной плате. 16 з.п. ф-лы, 11 ил.
1. Бескорпусная синхронная вращающаяся электрическая машина, содержащая статор и ротор, в которой ротор выполнен в виде магнитопровода из материала с высокой магнитной проницаемостью, закрепленного с возможностью вращения относительно статора и несущего магниты, статор имеет в своем составе обмотку, магнитопровод из материала с высокой магнитной проницаемостью, по крайней мере один датчик положения ротора и печатную плату с первой электрической схемой, соединяющей катушки статора, и второй электрической схемой, соединяющей датчики положения ротора,
отличающаяся тем, что в составе статора используется теплопроводный компаунд с коэффициентом теплопроводности не менее 0,5 Вт/м⋅К, по крайней мере один датчик температуры, на печатную плату установлен по крайне мере один штырьковый лепесток, при этом датчики положения ротора имеют возможность настройки и фиксации на печатной плате.
2. Бескорпусная синхронная вращающаяся электрическая машина по п. 1, отличающаяся тем, что теплопроводный компаунд имеет в своем составе теплопроводный наполнитель, например порошок оксида алюминия или нитрида бора.
3. Бескорпусная синхронная вращающаяся электрическая машина по п. 1, отличающаяся тем, что штырьковые лепестки запрессовываются в отверстия в печатной плате.
4. Бескорпусная синхронная вращающаяся электрическая машина по п. 1, отличающаяся тем, что штырьковые лепестки паяются на печатной плате.
5. Бескорпусная синхронная вращающаяся электрическая машина по п. 1, отличающаяся тем, что количество слоев печатной платы может быть от 1 до 32.
6. Бескорпусная синхронная вращающаяся электрическая машина по п. 1, отличающаяся тем, что в качестве датчиков положения ротора используются датчики Холла в предпочтительном количестве 3 или 6 шт.
7. Бескорпусная синхронная вращающаяся электрическая машина по п. 1, отличающаяся тем, что в качестве датчиков положения ротора используются магниторезистивные датчики в предпочтительном количестве 3 или 6 шт.
8. Бескорпусная синхронная вращающаяся электрическая машина по п. 6, отличающаяся тем, что датчики положения ротора после настройки фиксируются на печатной плате клеем или компаундом и установлены таким образом, что выводы датчиков положения ротора направлены в сторону от печатной платы и фиксируются на печатной плате методом пайки, при этом выводы датчиков положения ротора образуют петлю.
9. Бескорпусная синхронная вращающаяся электрическая машина по п. 1, отличающаяся тем, что обмотка выполнена двухрядной концентрированной, при этом катушки статора намотаны через изоляцию каждая на свой зубец статора.
10. Бескорпусная синхронная вращающаяся электрическая машина по п. 1, отличающаяся тем, что катушки статора объединены в последовательно соединенные группы катушек.
11. Бескорпусная синхронная вращающаяся электрическая машина по п. 1, отличающаяся тем, что выводы катушек статора или выводы групп катушек статора фиксируются на печатной плате методом пайки и соединяются между собой печатным монтажом в соответствии с электрической схемой статора.
12. Бескорпусная синхронная вращающаяся электрическая машина по п. 1, отличающаяся тем, что обмотка статора выполнена многожильным проводом, например литцендратом.
13. Бескорпусная синхронная вращающаяся электрическая машина по п. 1, отличающаяся тем, что в составе магнитопровода статора используется прецизионный сплав с высокой индукцией технического насыщения, например пермендюр.
14. Бескорпусная синхронная вращающаяся электрическая машина по п. 1, отличающаяся тем, что ротор расположен внутри статора.
15. Бескорпусная синхронная вращающаяся электрическая машина по п. 1, отличающаяся тем, что ротор расположен снаружи статора.
16. Бескорпусная синхронная вращающаяся электрическая машина по п. 1, отличающаяся тем, что печатная плата фиксируется на статоре посредством клея или компаунда.
17. Бескорпусная синхронная вращающаяся электрическая машина по п. 1, отличающаяся тем, что печатная плата покрыта слоем защитного покрытия.
| US 20150200576 A1, 16.07.2015 | |||
| Машина для сбора хлопка | 1929 |
|
SU21569A1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2014 |
|
RU2641659C2 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА СО ВСТРОЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2017 |
|
RU2656866C1 |
| Устройство пересечения горного массива автомобильной дорогой | 1948 |
|
SU77755A1 |

