Изобретение относится к области судовождения и может быть использовано в средствах автоматического и дистанционного управления движением судов для обеспечения безопасного расхождения с окружающими судами согласно Международным правилам предупреждения столкновений судов в море (МППСС-72).
Одним из условий реализации управления судна в стесненных условиях плавания является разработка автоматических систем, обеспечивающих безопасность судовождения в различных критических ситуациях, в том числе в районах интенсивного судоходства, где требуется обеспечить безопасное расхождение с окружающими судами согласно требованиям МППСС-72.
Известны устройства автоматического расхождения судна со встречным объектом (патенты RU №2501708 С1, 20.12.2013 [1], RU №2442718 С1, 20.02.2012 [2], RU №2678762 С1, 31.01.2019 [3], JP №2012210875 А, 01.11.2012 [4], ЕР №2088396 А1, 12.08.2009 [5], RU №2376194 20.12.2009 [6], RU №2383464, 10.03.2010 [7]).
Например, известная аппаратура автоматического расхождения судна со встречным объектом [6], содержит приемник спутниковой навигационной системы, вырабатывающий сигналы текущей широты и долготы судна, а также сигнал текущего путевого угла, задатчик путевого угла, датчик угловой скорости судна, датчик угла руля, выходы которых подключены соответственно к четырем входам сумматора, вырабатывающего сигнал скорости перекладки руля и соединенного с рулевым приводом, блок программного управления, вырабатывающий сигнал для корректировки заданного путевого угла при появлении встречного объекта и соединенный выходом с пятым входом сумматора, радар, вырабатывающий сигналы азимута встречного объекта и расстояния от встречного объекта до судна, и вычислитель, подключенный входами к радару и приемнику спутниковой навигационной системы, а выходом - к входу блока программного управления и выполненный с возможностью формирования траекторий будущего движения судна и встречного объекта, а также определения по ним широты и долготы точки пересечения отрезков траекторий будущего движения судна и встречного объекта.
Из патента на изобретение [7] известно устройство исключения столкновения судна с встречным движущимся объектом, которое содержит приемник спутниковой навигационной системы, вырабатывающий сигналы курса, текущей широты, текущей долготы, путевого угла и текущей скорости судна, задатчик путевого угла, датчик угловой скорости судна и датчик угла руля, выходы которых подключены к соответствующим входам блока сбора и передачи навигационной обстановки (сумматора), вырабатывающего сигнал скорости перекладки руля и соединенного с рулевым приводом, блок коррекции скорости хода, радар, вырабатывающий сигналы азимута встречного объекта и расстояния от встречного объекта до судна, и блок анализа обстановки и выработки решений (вычислитель), подключенный входами к радару и приемнику спутниковой навигационной системы, а выходом - к входу блока коррекции скорости хода, и выполненный с возможностью формирования траекторий будущего движения судна и встречного объекта, а также определения по ним в ограниченной акватории судна широты и долготы точки пересечения отрезков траекторий будущего движения судна и встречного объекта.
В качестве основных недостатков приведенных аналогов можно отметить отсутствие возможностей: учета требований МППСС-72, использования альтернативных источников навигационной информации и подхода к обобщению целевой обстановки, учета ограничений движения судов в море, а также уточнения физических ограничений судна для маневрирования.
Задачей также известного изобретения (патент RU №2752725С1, 30.07.2021 [8]), является создание системы прогнозирования безопасного расхождения судов, обеспечивающей безопасное расхождение с окружающими судами согласно требованиям МППСС-72, путем устранения указанных недостатков, которое выбрано в качестве прототипа.
Технический результат, достигаемый при осуществлении данного изобретения, заключается в повышение точности определения оптимальных маневров расхождения судов в различных критических ситуациях [8].
При этом технический результат достигается тем, что в систему прогнозирования безопасного расхождения судов, содержащей блок сбора и передачи навигационной обстановки и блок анализа обстановки и выработки решений, дополнительно включены блок комплексирования целевой обстановки, блок формирования и передачи ограничений плавания, блок обработки и маршрутизации данных, блок математической модели движения судна и блок ведения по маршруту, при чем вход-выход блока комплексирования целевой обстановки соединен с входом-выходом блока обработки и маршрутизации данных, выход которого соединен с входом блока математической модели движения судна, входы-выходы которого соединены с входами-выходами блока анализа обстановки и выработки решений и блока ведения по маршруту, вход-выход которого соединен с входом-выходом блока обработки и маршрутизации данных, входы-выходы которого соединены с входами-выходами блока формирования и передачи ограничений плавания, блока сбора и передачи навигационной обстановки и блока анализа обстановки и выработки решений, который выполнен с возможностью определения маневра безопасного расхождения с окружающими судами согласно основному алгоритму, соответствующему рекомендациям правил МППСС-72, и альтернативному алгоритму, позволяющему снизить вероятность не построения маневра безопасного расхождения с окружающими судами в случае наличия опасной ситуации судовождения [8].
Однако известная автоматизированная система управления судном строится на принципах совмещения данных об окружающей обстановке, получаемой с помощью систем наблюдения и позиционирования с электронной навигационной картой. Предупреждение столкновения на самом деле сводится к расчету геометрического сценария маневра сближения вплотную с установленной областью с выдачей некоторых рекомендаций капитану судна принимающему окончательное решение.
Тем не менее, статистика аварийности из-за человеческого фактора не снижается, не смотря на продолжающиеся внедрения новых более совершенных технических средств судовождения. Это может быть объяснено, в том числе и сокращение численности экипажей из-за увеличения доли автоматизации управления судном. Однако по данным IMO доля аварий из-за человеческого фактора продолжает оставаться на уровне 80%.
В решении задач предупреждения столкновения судов важная роль продолжает отводиться техническим средствам. Например, проблемы опознавания и привязки судов были сняты с внедрением аппаратуры универсальной автоматической идентификационной системы (АИС), передающей динамическую информацию о судне.
Однако в силу многих причин капитаны судов все же нередко имеют искаженное представление о складывающейся обстановке либо приукрашая, либо излишне драматизируя ее. Управление судном происходит по установленным правилам и процедурам, что часто приводит к определенной шаблонности действий капитана судна, и не всегда учитываются условия некоторой информационной недостаточности. Выработанная практикой шаблонность действий не всегда помогает в правильности принятия решения в условиях часто неожиданного возникновения сложных ситуаций, что приводит к резкому увеличению вероятности ошибочных действий, связанных с резким переходом от недогрузки капитанов судов в обычных условиях (монотония, сенсорный голод, гиподинамия) к перегрузке в аварийных ситуациях. В результате, как показывает практика, происходит столкновение судов из-за бездействия или запоздалого маневра.
При всем разнообразии современных систем автоматизированного управления судном, включающих систему маневра последнего момента, аналогичной международной системе предупреждения столкновения в воздухе и все более распространяемых в автомобилях систем предупреждения столкновений, не существует.
Внедрение системы «маневра последнего момента» на судах позволит реализовать недопущение столкновения судов в море при бездействии, либо запоздалых действиях капитанов судов, что обеспечит своевременное выявление развивающейся аварийной ситуации и с помощью определенных управляющих воздействий своевременно исключит или минимизирует последствия столкновения судов.
По ряду различных причин вблизи судна (далее для удобства будем называть его судно «А») может оказаться другое судно (далее для удобства будем называть его судно «Б») на таком малом расстоянии, что столкновение уже нельзя предотвратить только действиями уступающего дорогу. Тогда судно А в соответствии с Правилом 17 (b) МППСС-72 должно немедленно выполнить маневр последнего момента.
Одной из проблем является то, что конкретная дистанция начала маневра последнего момента официальными документами не регламентирована, так, как она зависит от многих факторов. Например, (см. А. Яковлев. Маневр последнего момента. Морской сборник. 1976, №4. С 48.) с дистанции 10 кбт любой маневр крупнотоннажных судов, сближающихся полными ходами с курсовых углов 15-45°, уже не предотвратит столкновения. В то же время для маломерных судов дистанция 10 кбт достаточна для выполнения безопасного маневра. Натурные испытания, (см. А. Яскевич, Ю. Зурабов. Новые международные правила предупреждения столкновения судов. М., Транспорт. 1979.) проведенные с танкером дедвейтом 213 тыс.т, показали, что для изменения им курса на требуемые МППСС 30-60° необходимо 2-5 минут. За это время судно, имеющее скорость 15 уз, пройдет 5-12 кбт. Еще большего времени требует изменение скорости судов. Например, у судна дедвейтом более 200 тыс.т в случае перевода машинного телеграфа на «Стоп» скорость уменьшится вдвое только через 10-20 минут, а полностью оно остановится лишь через час. Даже при даче полного хода назад такое судно может быть остановлено только через 10-20 минут, за которые оно успеет пройти около 20-25 кбт.
Для каждого судна в соответствии с резолюцией IMCO А.209 (VII) от 28.10.71 рекомендуется включать в состав информации о маневренных качествах судна диаграммы разгона и торможения. Анализ этой информации показывает, что на современном уровне развития судостроения максимальное расстояние свободного торможения судна должно приниматься более 16 кбт.
При выборе дистанции последнего маневра последнего момента необходимо также учитывать то, что она не должна быть и слишком велика, чтобы не нарушить основной принцип согласованности действий при расхождении: «привилегированное» (согласно МППСС-72) судно сохраняет курс и скорость, а судно, находящее в положении «уступающего дорогу» уступает.
Анализ ситуации сближения судов показывает, что маневры курсом оказываются наиболее эффективными при расхождении с целью, идущей встречным курсом или обгоняющей судно.
В большинстве случаев предпочтение отдается изменению курса вправо, далее - уменьшению скорости хода вплоть до полной остановки, затем - изменению курса вправо с одновременным уменьшением скорости и, наконец, - изменению курса влево. Изменение курса в сторону увеличения пеленга, обычно вправо, является достаточно безопасным маневром, если он выполняется заблаговременно и решительно, чтобы показать ракурс другому судну. При этом уменьшится относительная скорость сближения, будет больше времени на оценку развивающейся ситуации.
При опасном сближении с целью, находящейся на траверзе, более рациональным в ряде случаев является маневр изменением скорости. Скорость рекомендуется уменьшать одноразово и не менее чем вдвое, для чего обычно необходимо стопорить машины и давать задний ход. Тем самым судоводитель будет иметь больше времени для оценки ситуации сближения судов, что вполне соответствует правилу 8 (е): «Если необходимо предотвратить столкновение или иметь больше времени для оценки ситуации, судно должно уменьшить ход или остановиться, застопорив свои движители или дав задний ход».
На комбинированный маневр (курсом и одновременно скоростью) распространяются требования, изложенные в правиле 8 (а, b, с). Выполнение одновременно двух действий уменьшает необходимое для маневра водное пространство по носу судна и увеличивает промежуток времени для надлежащей оценки ситуации. Учитывая то, что при сближении на противоположных или почти противоположных курсах нет судна привилегированного или обязанного уступить дорогу. Здесь действует каждое самостоятельно, применяя дополнительно сигналы маневроуказания. Относительная скорость сближения судов в этих условиях весьма высока и может составлять 40-50 уз. При таких скоростях относительного сближения при обнаружении топовых огней на пределе их дальности видимости сближение может произойти уже через 8-12 мин.
Также учитывая, что порядок действий для предотвращения столкновения точно не определен и зависит от обстоятельств и условий сближения. Основываясь на правиле 5 МППСС-72, предписывающее каждому судну вести постоянное наблюдение всегда, т.е. независимо от состояния видимости и района плавания используя все имеющиеся для этого возможности, включая визуальное и слуховое наблюдение, а также наблюдение с использованием технических средств. Беря за основу систему приема внешних звуковых сигналов типа SR8200, имеющую Свидетельство о типовом одобрении Российского Морского Регистра Судоходства, можно предложить систему «маневра последнего момента».
Задачей предлагаемого технического решения является повышение достоверности предотвращения столкновения судов.
Поставленная задача решается за счет того, что в систему прогнозирования безопасного расхождения судов, содержащую блок сбора и передачи навигационной обстановки и блок анализа обстановки и выработки решений, блок комплексирования целевой обстановки, блок формирования и передачи ограничений плавания, блок обработки и маршрутизации данных, блок математической модели движения судна и блок ведения по маршруту, причем вход-выход блока комплексирования целевой обстановки соединен с входом-выходом блока обработки и маршрутизации данных, выход которого соединен с входом блока математической модели движения судна, входы-выходы которого соединены с входами-выходами блока анализа обстановки и выработки решений и блока ведения по маршруту, вход-выход которого соединен с входом-выходом блока обработки и маршрутизации данных, входы-выходы которого соединены с входами-выходами блока формирования и передачи ограничений плавания, блока сбора и передачи навигационной обстановки и блока анализа обстановки и выработки решений, который выполнен с возможностью определения маневра безопасного расхождения с окружающими судами согласно основному алгоритму, соответствующему рекомендациям правил МППСС-72, и альтернативному алгоритму, позволяющему снизить вероятность не построения маневра безопасного расхождения с окружающими судами в случае наличия опасной ситуации судовождения, в отличие от прототипа дополнительно введены круговой излучатель звукового сигнала дальностью действия 16 кбт, четыре секторных приемника звуковых сигналов, вычислитель маневра последнего момента, соединенный своими входами соответственно с выходами кругового излучателя звукового сигнала дальностью действия 16 кбт, четырьмя секторными приемниками приема внешних звуковых сигналов, блока анализа обстановки и выработки решений, а своим выходом соединен с входом исполнительного устройства - авторулевым.
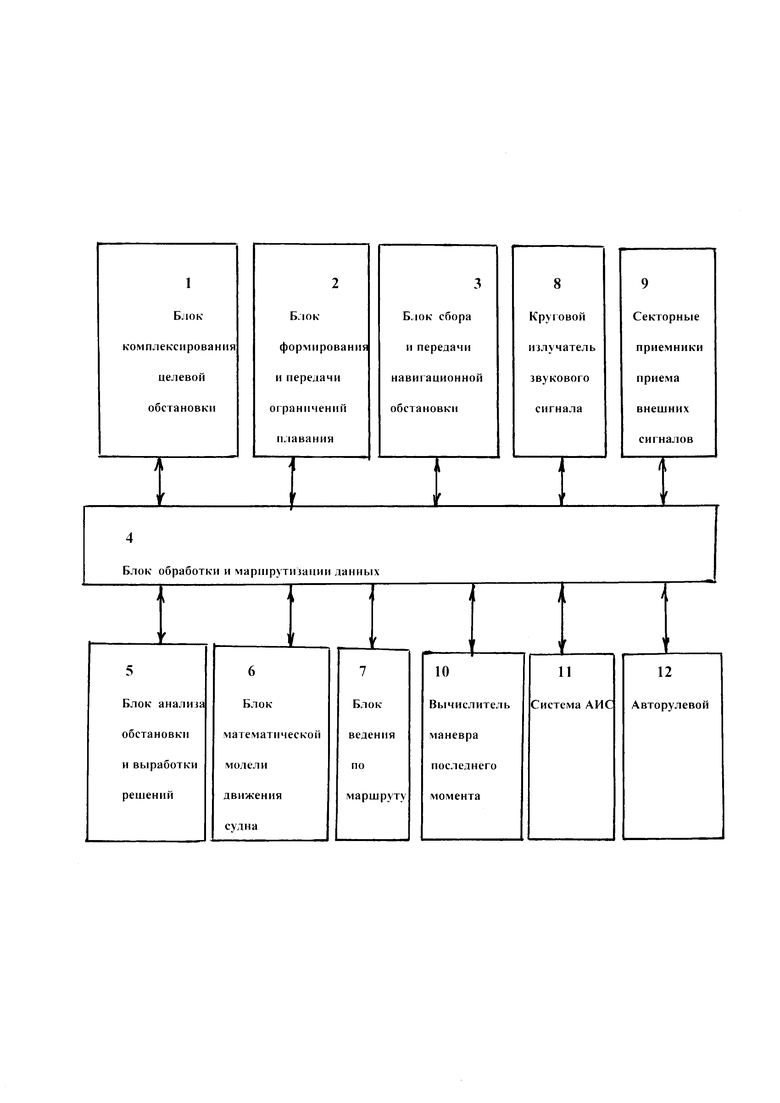
Сущность заявляемой системы прогнозирования безопасного расхождения судов поясняется примером ее реализации и чертежом (фигура), где изображено: блок 1 комплексирования целевой обстановки (БКЦО), блок 2 формирования и передачи ограничений плавания (БФПОП), блок 3 сбора и передачи навигационной обстановки (БСПНО), блок 4 обработки и маршрутизации данных (БОМД), блок 5 анализа обстановки и выработки решений (БАОВР), блок 6 математической модели движения судна (БММДС) и блок 7 ведения по маршруту (БВМ), круговой излучатель 8 звукового сигнала (КИЗС) дальностью действия 16 кбт, четыре секторных приемника 9 звуковых сигналов (СПЗС), вычислитель 10 маневра последнего момента (ВМПМ), соединенный своими входами соответственно с выходами кругового излучателя 8 звукового сигнала дальностью действия 16 кбт, четырьмя секторными приемниками 9 приема внешних звуковых сигналов, вычислитель 10 маневра последнего момента, системой 11 АИС а своим выходом соединен с входом исполнительного устройства - авторулевым 12.
Блок 1 комплексирования целевой обстановки предназначен для приема данных о целевой обстановке от обзорно-поисковой системы, радиолокационной станции и автоматической идентификационной системы, формирования и выдачи обобщенной целевой обстановки и представляет собой программно-аппаратный комплекс, реализованный с использованием специализированного программного обеспечения, которое обеспечивает прием, анализ и отказоустойчивую фильтрацию навигационных данных на основе диагностических и отказоустойчивых фильтров Калмана.
Блок 2 формирования и передачи ограничений плавания предназначен для установки и обновления коллекции морских электронных навигационных карт, приема дополнительных данных от сервисов сообщений и запросов на выдачу ограничений от других подсистем, формирования и выдачи ограничений плавания и представляет собой специализированный картографический сервер.
Блок 3 сбора и передачи навигационных данных предназначен для приема данных о положении судна от навигационных датчиков и представляет собой программно-аппаратный комплекс, реализованный с использованием специализированного программного обеспечения.
Блок 4 обработки и маршрутизации данных предназначен для получения, сохранения и перераспределения данных между блоками системы, а также формирования команд тревог, предупреждений и сообщений. Блок представляет собой программно-аппаратный комплекс.
Блок 5 анализа обстановки и выработки решений предназначен для выполнения анализа навигационной обстановки на предмет опасностей плавания, идентификации их в соответствии с требованиями МППСС-72, а также расчета маневра безопасного расхождения с окружающими судами и возвращения на маршрут. Для расчета маневра безопасного расхождения судов используется алгоритм, представляющий собой мультиагентную систему, агенты которой имеют различное функциональное назначение и реализованы в отдельных программных модулях, общая задача которых обеспечить расчет безопасного маневра расхождения судна с учетом навигационной обстановки. В БАОВР 5 реализованы основной (фиг. 2 прототипа) и альтернативный (фиг. 3 прототипа) алгоритмы расчета маневра безопасного расхождения судна. Основной алгоритм (фиг. 2 прототипа) имеет формализованную логику работы, соответствующую рекомендациям правил МППСС-72. Альтернативный алгоритм (фиг. 3 прототипа), обеспечивающий повышение отказоустойчивости, использует в основе неявные методы расчета траектории движения судна. Блок представляет собой программно-аппаратный вычислительный комплекс.
Блок 7 ведения по маршруту обеспечивает соотнесение маршрутных данных (запланированный маршрут, исполняемый маневр или траектория дистанционного управления) и собственных навигационных данных судна, формирование и выдачу уставок в подсистему управления движением, а также команд на подачу звуковых и световых сигналов встречным судам при расхождении с ними. Блок представляет собой программно-аппаратный вычислительный комплекс, реализованный с использованием специализированного программного обеспечения.
Блоки 1-7 по функциональному назначению аналогичны соответствующим блокам прототипа.
Круговой излучатель 8 звукового сигнала (КИЗС) дальностью действия 16 кбт представляет собой круговой излучатель типа LIEX.
Четыре секторных приемника 9 звуковых сигналов (СПЗС), каждый из которых представляют собой приемник звуковых сигналов типа СПВЗС-201.
Вычислитель 10 маневра последнего момента (ВМПМ) представляет собой центральный процессор на основе нейроматрицы NM 6403 или NM 6404.
Вычислитель 10 маневра последнего момента соединен своими входами соответственно с выходами кругового излучателя 8 звукового сигнала дальностью действия 16 кбт, четырьмя секторными приемниками 9 приема внешних звуковых сигналов, блока 5 анализа обстановки и выработки решений, системой АИС 11 а своим выходом соединен с входом исполнительного устройства - авторулевым 12.
Предлагаемая система прогнозирования безопасного расхождения судов работает следующем образом.
Информация от судовых конвенционных систем поступает в БКЦО 1 и БСПНО 3, которая передается в БОМД 4. Из БФПОП 2 ограничения района плавания, определенные по результатам обработки картографической информации, передаются в БОМД 4. В БАОВР 5 из БОМД 4 поступают данные, описывающие навигационную обстановку, текущий маршрут судна, ограничения и рекомендации при построении маршрута (радиус циркуляции, скорости и пр.) и, опционально, текущий исполняемый маневр судна. После обработки этих данных выполняется анализ навигационной обстановки, в рамках которой осуществляется определение степени опасности целей и их ранжирование. Все многообразие возможных навигационных обстановок подразделяются на десять формализованных типовых навигационных ситуаций (ТНС), которые характеризуются различными признаками, вытекающие из взаимных характеристик движения судна и цели, состояния судна, а также погодной обстановки, и является результатом формализации МППСС-72. Для каждой из ТНС определен набор возможных действий судна для совершения маневра расхождения.
В случае отсутствия опасных целей расчет маневра безопасного расхождения с целями не выполняется, а в БАОВР 5 формируется соответствующее информационной сообщение.
В случае обнаружения опасных целей в БАОВР 5 согласно основному алгоритму (фиг. 2 прототипа) производится расчет маневра расхождения судна с целями, если решение не найдено, то расчет маневра расхождения судна с целями выполняется согласно альтернативному алгоритму (фиг. 3 прототипа). В БАОВР 5 по основному алгоритму определяется ТНС для наиболее опасной цели, определяющей вариант действия судна, согласно которому производится расчет маневра расхождения судна с целями. При успешном расчете маневра расхождения происходит передача полученных данных в БОМД 4. В случае неудачи расчета варианта маневра расхождения судна с целями для текущей ТНС БАОВР 5 выдает информационное сообщение и выполняет расчет траектории маневра расхождения согласно альтернативному алгоритму (фиг. 3 прототипа) до тех пор, пока не будет найдена оптимальная для текущей ТНС траектории маневра расхождения.
Принимая на вход итерируемые параметры, в БАОВР 5 запускается цикл (фиг. 4 прототипа) расчета набора траекторий RVO (reciprocal velocity obstacles), ограниченный предварительно установленным количеством итераций. На каждой итерации случайным образом, в рамках заданного диапазона происходит изменение внутренних параметров алгоритма RVO: neighbourDist; radius; timeHorizon; timeHorizonObst; timeStep.
Параметр neighbourDist, характеризующий максимальную дистанцию, в пределах которой будут учитываться цели при расчете траектории, определяется по формуле:
neighbourDist=2+D1*totalDist,
где D1 - равномерно распределенное случайное число в диапазоне от 0 до 1;
totalDist - общая протяженность маршрута.
Параметр radius, характеризующий радиус агента RVO, то есть расстояние, на которое агент не подпускает к себе других агентов, определяется по формуле:
radius=RADIUS_SEARCH_COEF+D3*RADIUS_SEARCH_RANGE,
где D3 - равномерно распределенное случайное число в диапазоне от 0 до 1;
RADIUS_SEARCH_COEF - аддитивная константа;
RADIUS_SEARCH_RANGE - мультипликативная константа.
Параметр timeHorizon характеризует минимальное количество времени, в течение которого скорости агента, вычисленные с помощью моделирования, безопасны по сравнению с другими агентами. Чем больше это число, тем раньше этот агент отреагирует на присутствие других агентов, но тем меньше у агента свободы выбора скорости движения. Параметр timeHorizon определяется по формуле:
timeHorizon=0.1+D2, где D2 - равномерно распределенное случайное число в диапазоне от 0 до 1.
Параметр timeHorizonObst характеризует минимальный промежуток времени, в течение которого скорости агента, вычисленные при моделировании, безопасны по отношению к препятствиям. Чем больше это число, тем быстрее этот агент отреагирует на наличие препятствий, но тем меньше у агента свободы выбора скорости. Параметр timeHorizonObst определяется по формуле: timeHorizonObst=0.2+D5,
где D5 - равномерно распределенное случайное число в диапазоне от 0 до 1.
Параметр timeStep, характеризующий шаг расчета следующей точки траектории по времени, определяется по формуле:
timeStep=DIST_VARIATION*timeDist/(ITERATION_TIME_LIMIT*(0.6+1.5*D4)),
где D4 - равномерно распределенное случайное число в диапазоне от 0 до 1;
timeDist - примерно рассчитанное время движения по маршруту;
DIST_VARIATION и ITERATION TIME LIMIT - настраиваемые константы.
В БАОВР 5 осуществляется проверка каждой из построенных траекторий маневра расхождения судна с целями. Проверка производится в соответствии с алгоритмом валидации и оценки качества траекторий маневра расхождения судна (фиг. 5 прототипа). В случае, если коэффициент качества K<50, то траектория признается оптимальной, и ее параметры из БАОВР 5 передаются в БОМД 4. В противном случае алгоритм продолжает построение траекторий, записывая параметры каждой из тех, что прошли проверку опасного сближения с целями, в массив траекторий. В случае не нахождения траектории с коэффициентом качества K<50 за предварительно установленное количество итераций происходит дальнейший расчет траекторий двумя другими методами. Методом, основанном на методе перебора Monte-Carlo и методом, основанном на APF (artificial potential fields) с перебором единственного параметра timeStep. Если в результате работы этих методов не находится ни единой траектории с K<50, то из всего набора валидных траекторий, записанных в массив, выбирается та, у которой коэффициент качества будет наименьшим, параметры выбранной траектории передаются в БОМД 4.
По результатам обработки готовая траектория из БОМД 4 передается в БВМ 7, который уточняет возможности судна с учетом текущих характеристик, полученных из БММДС 6, и формирует из заданной траектории курс и скорость движения судна в момент времени, с целью соответствия выработанному маневру расхождения.
При движении судна в зоне опасных целей круговой излучатель 8 звукового сигнала с периодичностью рассчитанной вычислителем 10 маневра последнего момента в зависимости от скорости движения судна и диаграммы разгона и торможения выдает звуковой сигнал.
Первый секторный приемник 9 звукового сигнала работает в секторе приема 60° левого борта - 60° правого борта.
Второй секторный приемник 9 звукового сигнала работает в секторе приема 60° правого борта - 120° правого борта.
Третий секторный приемник 9 звукового сигнала работает в секторе приема 120° правого борта - 150° левого борта.
Четвертый секторный приемник 9 звукового сигнала работает в секторе приема 60° левого борта - 150° левого борта.
При получении сигнала с первого секторного приемника 9 вычислитель 10 маневра последнего момента дает команду на авторулевой 12 для отворота ВПРАВО на 60° до вмешательства капитана судна. При получении сигнала с второго секторного приемника 9 вычислитель 10 маневра последнего момента дает команду на авторулевой 12 для отворота ВЛЕВО на 60° и СТОП, до вмешательства капитана судна. При получении сигнала с третьего секторного приемника 9 вычислитель 10 маневра последнего момента дает команду на авторулевой 12 для отворота ВЛЕВО на 60° до вмешательства капитана судна. При получении сигнала с четвертого секторного приемника 9 вычислитель 10 маневра последнего момента дает команду на авторулевой 12 для отворота ВПРАВО на 60° и СТОП, до вмешательства капитана судна. Все команды на авторулевой 12 сопровождаются подачей сигналов маневроуказания согласно МППСС-72.
Предварительно вычислитель 10 маневра последнего момента получает информацию от системы АИС 11 о судах, которые находятся в границах маршрута. Далее выполняются расчеты в зависимости от скорости движения своего судна и диаграммы разгона и торможения, а также в зависимости от скорости движения судов и диаграммы разгона и торможения с которыми необходимо разойтись. При этом рассчитывают возможные варианты безопасного расхождения, путем построения диаграммы для выбора маневра по предупреждению столкновений судов при расхождении. Компьютерная программа, содержащая средства программного кода с возможностью выполнения этапов расхождения судов при исполнении программы на аппарате обработки данных хранится на машинночитаемом носителе.
При этом учитываются текущие параметры движения судна, параметры ветра, углы тяги, эксцентриситет и обороты движителей, обороты подруливающего устройства, глубина под килем, траектория движения центра тяжести, носовой и кормовой оконечностей. Программные значения угла курса, угловой скорости положения руля определяют в соответствии с моделью движения судна в дополнительной функции скорости и направления ветра, углов тяги, эксцентриситета и оборотов движителей, оборотов подруливающего устройства, глубины под килем, траекторий движения центра тяжести, носовой и кормовой оконечностей и углов дрейфа и сноса судна. Управляющий сигнал через аппаратные средства программного обеспечения автоматически подается на авторулевой с четырех секторных приемников, при этом команды на авторулевой сопровождаются подачей сигналов маневроуказания.
Предлагаемое техническое средство выгодно отличается от имеемых средств автоматизации судовождения простотой.
Предлагаемое техническое устройство позволит избегать столкновения судов при чрезмерном сближении, предоставляя дополнительное время капитану судна для оценки ситуации и принятия решения, позволяет обеспечить идентификацию навигационной опасности, повышение точности определение оптимального маневра расхождения судна в различных критических ситуациях с учетом МППСС-72 и фактических возможностей маневрирования судна, а также передачу управляющих сигналов в виде курса и скорости для последующей интерпретации в управляющие сигналы для судовых движительных систем.
Источники информации
1. Патент RU №2501708 С1, 20.12.2013.
2. Патент RU №2442718 С1, 20.02.2012.
3. Патент RU №2678762 С1, 31.01.2019.
4. Патент JP №2012210875 А, 01.11.2012.
5. Патент ЕР №2088396 А1, 12.08.2009.
6. Патент RU №2376194 20.12.2009.
7. Патент RU №2383464, 10.03.2010.
8. Патент RU №2752725 С1, 30.07.2021.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| СИСТЕМА ПРОГНОЗИРОВАНИЯ БЕЗОПАСНОГО РАСХОЖДЕНИЯ СУДОВ | 2020 |
|
RU2752725C1 |
| Способ генерации предварительной прокладки пути судна и устройство для его реализации | 2021 |
|
RU2782617C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| АВТОРУЛЕВОЙ СУДНА | 2011 |
|
RU2465170C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2021 |
|
RU2759068C1 |
| Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления и арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2021 |
|
RU2773538C1 |
Система прогнозирования безопасного расхождения судов предназначена для обеспечения безопасного расхождения с окружающими судами. Система включает блок комплексирования целевой обстановки, блок формирования и передачи ограничений плавания, блок сбора и передачи навигационной обстановки, блок обработки и маршрутизации данных, блок анализа обстановки и выработки решений, блок математической модели движения судна и блок ведения по маршруту. В состав дополнительно введены круговой излучатель звукового сигнала, секторные приемники приема внешних звуковых сигналов, вычислитель маневра последнего момента, блок анализа обстановки и выработки решений и АИС, авторулевой. Система позволяет избегать столкновения судов при чрезмерном сближении, тем самым повышает безопасность судовождения в различных критических ситуациях. 1 ил. 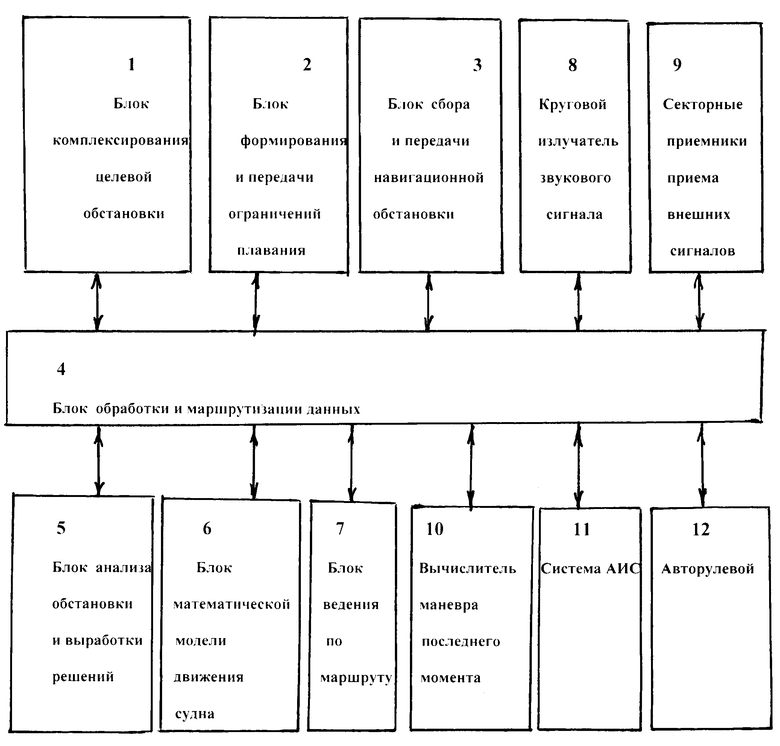
Система прогнозирования безопасного расхождения судов, содержащая блок сбора и передачи навигационной обстановки и блок анализа обстановки и выработки решений, блок комплексирования целевой обстановки, блок формирования и передачи ограничений плавания, блок обработки и маршрутизации данных, блок математической модели движения судна и блок ведения по маршруту, причем вход-выход блока комплексирования целевой обстановки соединен с входом-выходом блока обработки и маршрутизации данных, выход которого соединен с входом блока математической модели движения судна, входы-выходы которого соединены с входами-выходами блока анализа обстановки и выработки решений и блока ведения по маршруту, вход-выход которого соединен с входом-выходом блока обработки и маршрутизации данных, входы-выходы которого соединены с входами-выходами блока формирования и передачи ограничений плавания, блока сбора и передачи навигационной обстановки и блока анализа обстановки и выработки решений, который выполнен с возможностью определения маневра безопасного расхождения с окружающими судами согласно основному алгоритму, соответствующему рекомендациям правил МППСС-72, и альтернативному алгоритму, позволяющему снизить вероятность непостроения маневра безопасного расхождения с окружающими судами в случае наличия опасной ситуации судовождения, отличающаяся тем, что дополнительно введены круговой излучатель звукового сигнала дальностью действия 16 кбт, четыре секторных приемника звуковых сигналов, вычислитель маневра последнего момента, соединенный своими входами соответственно с выходами кругового излучателя звукового сигнала дальностью действия 16 кбт, четырьмя секторными приемниками приема внешних звуковых сигналов, блока анализа обстановки и выработки решений и АИС, а своим выходом соединен с входом исполнительного устройства - авторулевым.
| СИСТЕМА ПРОГНОЗИРОВАНИЯ БЕЗОПАСНОГО РАСХОЖДЕНИЯ СУДОВ | 2020 |
|
RU2752725C1 |
| СПОСОБ ГЕНЕРАЦИИ ПРЕДВАРИТЕЛЬНОЙ ПРОКЛАДКИ СУДНА | 2020 |
|
RU2735163C1 |
| WO 2015195801 A1, 23.12.2015 | |||
| CN 110658814 А, 07.01.2020 | |||
| CN 113129646 А, 16.07.2021 | |||
| WO 2017013749 A1, 26.01.2017 | |||
| CN 109945877 А, 28.06.2019. | |||

