Изобретение относится к области судовождения, а именно к способам и системам генерации линии предварительной прокладки с использованием систем искусственного интеллекта, и может быть использовано для повышения безопасности плавания в концепции Е-навигации.
Процесс выполнения предварительной прокладки на сегодняшний день зачастую выполняется судоводителем вручную. Это приводит к ошибкам в процессе выполнения предварительной прокладки, которые, в свою очередь, могут привести к аварии судна.
Задача автоматического получения прокладки пути судна на электронной карте сводится к построению удобного и безопасного маршрута от одной точки до другой. Для ее решения предлагается применять математические алгоритмы искусственного интеллекта. Главное преимущество систем искусственного интеллекта заключается в возможности непрерывного стабильного функционирования и отсутствие влияния психологических факторов.
Известен способ по патенту РФ №2513198 «Способ обеспечения безаварийного движения надводного или подводного судна при наличии подводных или надводных потенциально опасных объектов», опубликованный 20.04.2014 г. Данный способ включает постоянный прием спутниковых навигационных данных от радиолокационной станции, автоматической идентификационной системы, определение местоположения судна, вычисление скорости судна, глубины под килем. Дополнительно включают операции, согласно которым получают трехмерное изображение подводной обстановки со всех сторон судна спереди, с боков и сзади, для чего используют гидролокаторы в передней, задней, левой и правой областях, в случае обнаружения потенциально опасных объектов распознают их либо самим судоводителем, либо распознающим устройством и выбирают оптимальный способ предотвращения столкновения судна с потенциально опасным объектом и рассчитывают траекторию уклонения от потенциально опасного объекта. Повышается вероятность безаварийного движения надводного и подводного судна в различных потенциальных опасных аварийных ситуациях.
Недостатком данного способа является то, что отсутствует блок автоматического принятия решений по маневрированию и/или изменению скорости.
Известен способ по патенту РФ №2207296 «Способ автоматической проводки судна», опубликованный 13.10.2000 г.
Суть изобретения состоит в том, что способ автоматической проводки судна базируется на компенсации разницы между измерениями параметров движения судна от датчиков курса, угловой скорости, положения руля и позиционирующего прибора, с программными значениями данных параметров движения и формирование управляющего сигнала на рулевой привод в функции данных рассогласования и скорости судна, при этом выделяют участки, которые в зависимости от ширины участка судового хода аппроксимируют прямыми линиями, для которых программные значения угла курса постоянные, и криволинейные участки, соединяющие прямолинейные, которые аппроксимируют дугами круга радиуса разворота и переходными участками, при этом программные значения курса, угловой скорости, положения руля определяют в соответствии с упрощенной моделью движения судна в функции радиуса разворота, текущей скорости и времени.
Недостатками данного способа являются:
Отсутствие возможности комплексно оценивать безопасность маршрута, равно как и безопасность в текущей навигационной обстановке, так как упомянутый способ не предусматривает измерение этих параметров.
Нет четкого указания механизма фильтрации и комплексования данных от различных источников, что может породить целый ряд проблем, в частности, проблемы сочетания навигационных параметров разной природы.
Известна полезная модель по патенту РФ №107124, опубл. 10.08.2011 г., «Информационно-управляющий комплекс для автоматизации судовождения и динамического позиционирования судна». Полезная модель представляет собой комплекс блоков управления, вычислительных блоков, блоков датчиков параметров и т.д. Это решение дает возможность определения координат, скорости и курса судна, его крена и дифферента, а также течения и приливного воздействия, но не решает задачу автоматического получения прокладки пути судна.
В качестве прототипа для предлагаемого изобретения взят патент РФ №2678762, опубл. 31.01.2019 г., «Способ и система контроля местоположения судна с помощью нечеткой логики».
Контроль местоположения судна включает получение навигационных параметров, поступающих в блок входной информации, а затем в блок обработки информации, при этом используют нечеткую логику: в созданной матрице каждой ячейке присваивают координаты X и Y, после чего ее подвергают нечеткой кластеризации для выделения участков с повышенной опасностью. Местоположение судна определяют путем совокупного учета навигационной информации от различных источников с помощью нечетких чисел, равно как и степень опасности следования судна по линиям, полученным в блоке генерации линий предварительной прокладки в кластеризованной среде. В блоках нахождения координат X и Y определяют координаты ячеек, через которые проходят линии предварительной прокладки. Выходные данные вводят в блок для проверки линий предварительной прокладки в кластеризованной среде, получают оценку опасности в текущий момент и величину опасности в графическом виде при следовании по маршруту. Возможно комплексно оценивать безопасность маршрута, безопасность в текущей навигационной обстановке и комплексно оценивать данные от различных источников. Существенно повышается безопасность проводки судна
Недостатками прототипа являются: концептуальная недостаточность использования прогнозного потенциала нечеткой кластеризации при прокладке маршрута. Поиск пути происходит без учета потенциала опасности в каждой ячейке, а подсчет суммарного уровня опасности маршрута происходит уже после получения прокладки.
ТЕХНИЧЕСКОЙ ЗАДАЧЕЙ предлагаемого способа генерации линии предварительной прокладки является расширение использования прогнозного потенциала нечеткой кластеризации при автоматизации предварительной прокладки маршрута плавания на электронной карте.
Для решения поставленной задачи предложен способ генерации предварительной прокладки судна, включающий нечеткую кластеризацию навигационной карты с последующим анализом на основе построения матрицы, каждой ячейке которой присваивают координаты X и Y, после чего ее подвергают нечеткой кластеризации с возможностью выделения участков повышенной опасности и определения координат ячеек, через которые проходят линии предварительной прокладки, ОТЛИЧАЮЩИЙСЯ тем, что построение маршрута движения судна происходит итерационно и поэтапно, при этом вследствие логических преобразований, происходящих в ячейках матриц, навигационные параметры учитываются в виде значения функции принадлежности конкретной ячейки к кластеру опасных, а в качестве навигационных опасностей выделяют основные навигационные параметры: расстояние до опасности, направление и скорость движения управляемого судна, после чего на начальном этапе генерируют «грубые» линии предварительной прокладки с учетом полученной матрицы опасностей, а на следующем этапе происходит уточнение маршрута на основе скорректированных данных об опасности и координат точек предварительного маршрута, и осуществляют построение предварительного маршрута.
ТЕХНИЧЕСКИЙ РЕЗУЛЬТАТ предлагаемого способа заключается в возможности получения кластеризации маршрута судна. Технический результат достигается тем, что при использовании нечеткой кластеризации итерационно учитывается опасность, так как матрица, каждая ячейка которой характеризуется координатами X и Y, подвергается ступенчатой нечеткой кластеризации для выделения участков с повышенной опасностью. При этом определяют генеральное направление движения судна, уточняют опасность с учетом нечетких генеральных направлений, а затем строят маршрут в уточненной среде, с возможностью получения улучшенного уровня данных о безопасности следования судна по маршруту.
СУЩНОСТЬ предлагаемого способа.
В случае навигационных опасностей, алгоритм выделяет в качестве основных навигационных параметров расстояние до опасности, направление и скорость движения управляемого судна. Далее, алгоритм на начальном этапе генерирует «грубые» линии предварительной прокладки с учетом полученной матрицы опасностей. Эти сгенерированные линии предварительной прокладки получают оценку опасности, а судоводитель также получает оценку опасности текущего состояния судна. При высокой степени опасности на следующем этапе производится уточнение маршрута на основе скорректированных данных об опасности и координат точек предварительного маршрута, и осуществляют построение предварительного маршрута, в соответствии с которым судоводитель может принять решение о дальнейших действиях.
ОТЛИЧИЕ предлагаемого способа от прототипа заключается в том, что происходит построение предварительного маршрута по координатам точек будущего маршрута с адекватным уровнем опасности с тем, чтобы не провести судно слишком близко к опасностям, а также, чтобы не сделать маршрут слишком длинным. На следующем шаге происходит уточнение маршрута с учетом скорректированных данных об опасности и предварительного маршрута. Такая пост-обработка также является отличительной особенностью. На выходе получают графическую прокладку маршрута судна, состоящую из путевых точек и соединяющих их линий, и обработанную электронную навигационную карту с просчитанным уровнем опасности на каждом ее участке. В отличие от аналогов, благодаря нечеткой кластеризации, можно получить значения навигационной опасности для каждой области карты и для всего маршрута в целом. Полученный маршрут является оптимальным по критериям безопасности и длины.
Изобретение поясняется следующими чертежами:
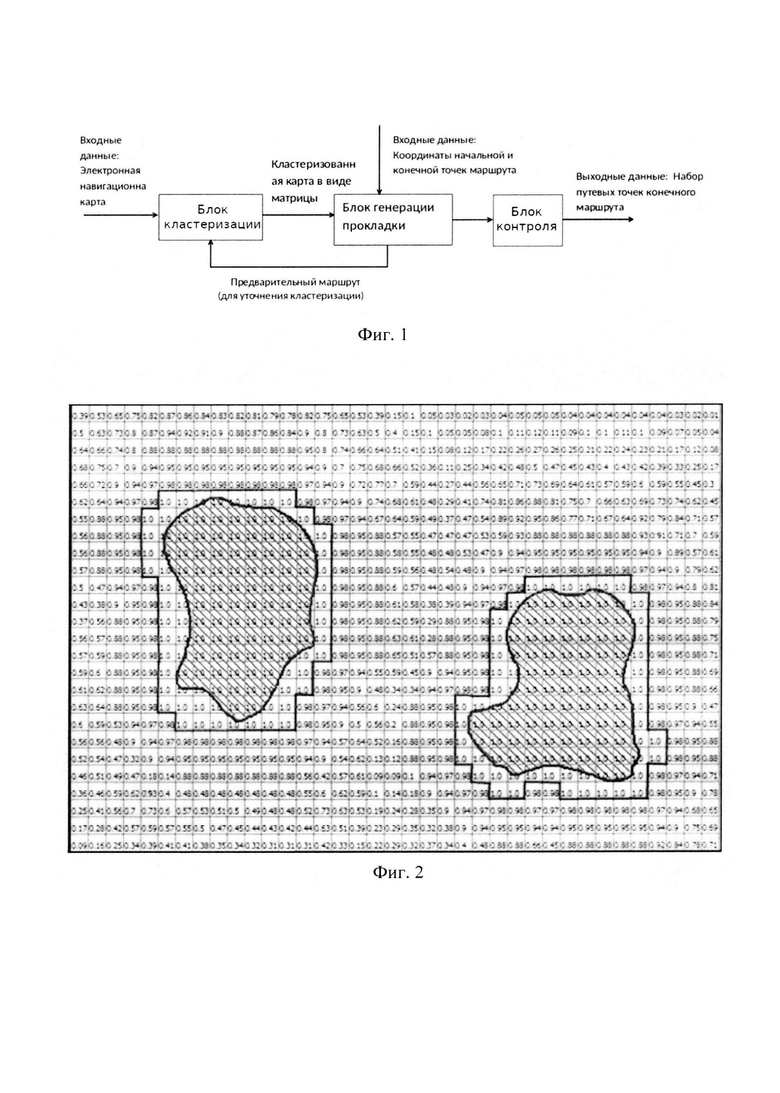
Фиг. 1 Общая схема системы.
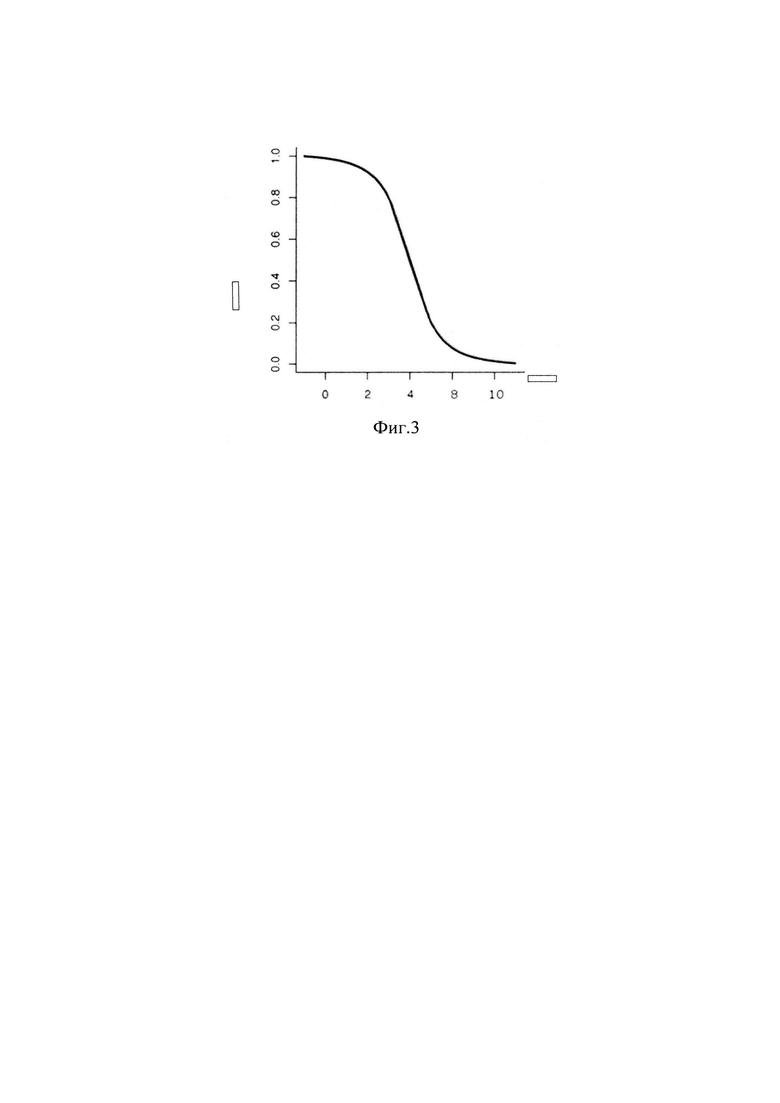
Фиг. 2 Схематичное представление карты в виде матрицы с вычисленными суммарными коэффициентами опасности.
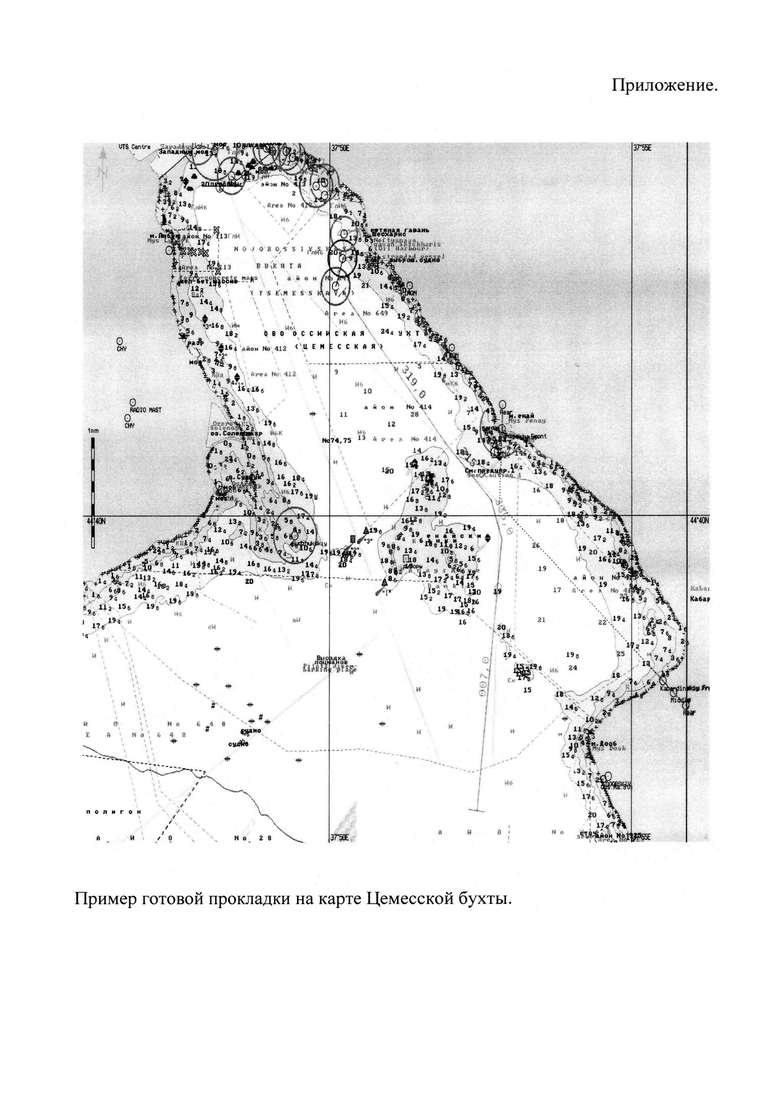
Фиг. 3 График функции выживаемости.
Приложение. Пример готовой прокладки на карте Цемесской бухты.
Предложенный способ реализуется системой, состоящей из блока кластеризации, блока генерации предварительной прокладки и блока контроля.
Общая схема представлена на фиг. 1. На ней показана взаимосвязь блоков системы, включая блок кластеризации, который останавливается при попадании в недопустимые значения параметров безопасности следования по маршруту.
Блок кластеризации производит обработку информации с электронной карты, создавая поверх нее матрицу с ячейками, обозначенными координатами Х и У. Отличительной особенностью такого подхода является получаемые нечеткой кластеризацией значения навигационной опасности для каждой области карты. Блок генерации линий предварительной прокладки в кластеризованной среде создает маршрут движения судна, который является оптимальным по критериям безопасности и длины. Блок контроля осуществляет проверку генеральных линий предварительной прокладки на наличие опасностей.
В качестве входных данных система получает электронную карту, на которую накладывается двумерная матрица ячеек, где каждая ячейка характеризуется координатами X и Y. Значению «X» соответствуют координаты ячейки по горизонтали, а «Y» - по вертикали. Обработка карты происходит в блоке кластеризации. В процессе обработки в каждую ячейку матрицы записывается число в диапазоне [0,1], соответствующее уровню опасности для судна при нахождении в данной ячейке. Причем, значение «1» является навигационной опасностью, а значение «0» - участком, где возможен безопасный проход судна. Промежуточные значения соответствуют областям, граничащим с опасностью. Для подсчета коэффициента в каждой ячейке используется многокритериальный подход с использованием функции выживаемости. График функции распределения значений степени угрозы в каждой ячейке представлен на фиг. 3. После построения поля, система ждет команды от судоводителя, а именно: он должен начать построение маршрута, введя начальные и конечные координаты.
После этого система начинает поиск пути с помощью алгоритма поиска пути собственной разработки. Алгоритм проверяет достижимость конечной точки от изначальной, и если она установлена, то прокладывает кратчайший маршрут. Для этого перебираются клетки со значением не «1» в направлении из начальной в конечную точки и каждой назначается «вес» зависящий от длины пути до данной клетки от начальной, длины пути до данной клетки от конечной и от коэффициента опасности в данной клетке. Для получения маршрута выбираются клетки с наименьшим весом. Этот маршрут еще не окончателен и требует уточнения. Далее происходит уточнение кластеризации с учетом наброска маршрута.
Таким образом, обрабатываются случаи приближения либо отдаления от опасности. Очевидно, что суммарный потенциал опасности ячейки меньше, если судно движется в сторону от опасности, даже если находится в непосредственной близости от нее. В тоже время область можно считать более опасной, если судно будет приближаться к опасности. Ячейки поля обрабатываются в соответствии с указанными правилами.
Полученное уточненное поле коэффициентов служит рабочим полем для алгоритма генерации прокладки. Блок генерации прокладки теперь прорабатывает финальный маршрут, основываясь на имеющихся данных. На данном этапе, кроме выбора более подходящих ячеек для прохода, происходит сглаживание маршрута и уменьшение количества путевых точек. Финальный маршрут, который может быть получен системой, представлен на рисунке Приложения.
Из значений кластеров среды возможно выделение значения опасности, следования по маршруту, как пиковых, так и средних и пр.
Преимущество данного способа генерации линии предварительной прокладки и кластеризации маршрута заключается в том, что он позволяет автоматически получить удобный и безопасный маршрут, а также оценить текущий уровень безопасности при следовании по маршруту. При этом судоводитель получает карту, на которой наглядно показаны опасные области. Более того, данный подход позволяет строить более выгодные и продуманные маршруты, что имеет экономический эффект, так как улучшает логистику судоходства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ генерации предварительной прокладки пути судна и устройство для его реализации | 2021 |
|
RU2782617C1 |
| СПОСОБ И СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ СУДНА С ПОМОЩЬЮ НЕЧЕТКОЙ ЛОГИКИ | 2018 |
|
RU2678762C1 |
| Автоматизированная система сбора и распространения цифровой картографической информации водных путей | 2024 |
|
RU2833209C1 |
| Способ построения предварительной прокладки маршрута автономного необитаемого подводного аппарата | 2018 |
|
RU2672840C1 |
| Способ оценки собственного местоположения транспортного средства, преимущественно высокоскоростного поезда, и устройство для оценки собственного местоположения транспортного средства, преимущественно высокоскоростного поезда | 2023 |
|
RU2809391C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| Способ натурных испытаний безэкипажных судов | 2022 |
|
RU2797701C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| Способ определения на навигационных картах границ опасных участков морского дна | 2016 |
|
RU2647199C1 |
Изобретение относится к области судовождения, а именно, к способам и системам генерации линии предварительной прокладки с использованием систем искусственного интеллекта, и может быть использовано для повышения безопасности плавания в концепции Е-навигации. Построение маршрута движения судна происходит итерационно и поэтапно, при этом вследствие логических преобразований, происходящих в ячейках матриц, навигационные параметры учитываются в виде значения функции принадлежности конкретной ячейки к кластеру опасных. Для осуществления алгоритма используется система, состоящая из блока кластеризации, блока генерации предварительной прокладки и блока контроля. Повышается безопасность плавания. При этом судоводитель получает карту, на которой наглядно показаны опасные области. 4 ил.
Способ генерации предварительной прокладки судна, включающий нечеткую кластеризацию навигационной карты с последующим анализом на основе построения матрицы, каждой ячейке которой присваивают координаты X и Y, после чего ее подвергают нечеткой кластеризации с возможностью выделения участков повышенной опасности и определения координат ячеек, через которые проходят линии предварительной прокладки, отличающийся тем, что построение маршрута движения судна происходит итерационно и поэтапно, при этом вследствие логических преобразований, происходящих в ячейках матриц, навигационные параметры учитываются в виде значения функции принадлежности конкретной ячейки к кластеру опасных, а в качестве навигационных опасностей выделяют основные навигационные параметры: расстояние до опасности, направление и скорость движения управляемого судна, после чего на начальном этапе генерируют «грубые» линии предварительной прокладки с учетом полученной матрицы опасностей, а на следующем этапе уточняют маршрут на основе скорректированных данных об опасности и координат точек предварительного маршрута и осуществляют построение предварительного маршрута.
| СПОСОБ И СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ СУДНА С ПОМОЩЬЮ НЕЧЕТКОЙ ЛОГИКИ | 2018 |
|
RU2678762C1 |
| Способ высокоточного определения навигационных элементов движения судна | 2016 |
|
RU2643072C2 |
| WO 2006134256 А2, 21.12.2006 | |||
| US 20150278734 А1, 01.10.2015 | |||
| Способ прокладывания маршрута движения подвижных объектов по пересеченной местности | 2018 |
|
RU2681667C1 |

