Изобретение относится к области судовождения и может быть использовано в средствах автоматического и дистанционного управления движением судов для обеспечения безопасного расхождение с окружающими судами согласно Международным правилам предупреждения столкновений судов в море (МППСС-72).
Одним из условий реализации управления судна в безэкипажном режиме является разработка автоматических систем, обеспечивающих безопасность судовождения в различных критических ситуациях, в том числе в районах интенсивного судоходства, где требуется обеспечить безопасное расхождение с окружающими судами согласно требованиям МППСС-72.
Известна аппаратура автоматического расхождения судна со встречным объектом по патенту RU 2376194 (МПК В63Н 25/04, G08G 3/00, G05D 1/00, опубл. 20.12.2009), которая содержит приемник спутниковой навигационной системы, вырабатывающий сигналы текущей широты и долготы судна, а также сигнал текущего путевого угла, задатчик путевого угла, датчик угловой скорости судна, датчик угла руля, выходы которых подключены соответственно к четырем входам сумматора, вырабатывающего сигнал скорости перекладки руля и соединенного с рулевым приводом, блок программного управления, вырабатывающий сигнал для корректировки заданного путевого угла при появлении встречного объекта и соединенный выходом с пятым входом сумматора, радар, вырабатывающий сигналы азимута встречного объекта и расстояния от встречного объекта до судна, и вычислитель, подключенный входами к радару и приемнику спутниковой навигационной системы, а выходом - к входу блока программного управления и выполненный с возможностью формирования траекторий будущего движения судна и встречного объекта, а также определения по ним широты и долготы точки пересечения отрезков траекторий будущего движения судна и встречного объекта.
Из патента на изобретение RU 2383464 (МПК В63Н 25/04, G08G 3/00, G05D 1/00, опубл. 10.03.2010) известно устройство исключения столкновения судна с встречным движущимся объектом, которое содержит приемник спутниковой навигационной системы, вырабатывающий сигналы курса, текущей широты, текущей долготы, путевого угла и текущей скорости судна, задатчик путевого угла, датчик угловой скорости судна и датчик угла руля, выходы которых подключены к соответствующим входам блока сбора и передачи навигационной обстановки (сумматора), вырабатывающего сигнал скорости перекладки руля и соединенного с рулевым приводом, блок коррекции скорости хода, радар, вырабатывающий сигналы азимута встречного объекта и расстояния от встречного объекта до судна, и блок анализа обстановки и выработки решений (вычислитель), подключенный входами к радару и приемнику спутниковой навигационной системы, а выходом - к входу блока коррекции скорости хода, и выполненный с возможностью формирования траекторий будущего движения судна и встречного объекта, а также определения по ним в ограниченной акватории судна широты и долготы точки пересечения отрезков траекторий будущего движения судна и встречного объекта.
В качестве недостатков приведенных аналогов можно отметить отсутствие возможностей: учета требований МППСС-72, использования альтернативных источников навигационной информации и подхода к обобщению целевой обстановки, учета ограничений движения судов в море, а также уточнения физических ограничений судна для маневрирования.
Техническое решение, известное из патента RU 2383464, выбрано в качестве ближайшего аналога данного изобретения.
Задача, на решение которой направлено данное изобретение, заключается в создании системы прогнозирования безопасного расхождения судов, обеспечивающей безопасное расхождение с окружающими судами согласно требованиям МППСС-72, путем устранения указанных недостатков.
Технический результат, достигаемый при осуществлении заявляемого изобретения, заключается в повышение точности определения оптимальных маневров расхождения судов в различных критических ситуациях.
Указанный технический результат достигается тем, что в систему прогнозирования безопасного расхождения судов, содержащей блок сбора и передачи навигационной обстановки и блок анализа обстановки и выработки решений, дополнительно включены блок комплексирования целевой обстановки, блок формирования и передачи ограничений плавания, блок обработки и маршрутизации данных, блок математической модели движения судна и блок ведения по маршруту, при чем вход-выход блока комплексирования целевой обстановки соединен с входом-выходом блока обработки и маршрутизации данных, выход которого соединен с входом блока математической модели движения судна, входы-выходы которого соединены с входами-выходами блока анализа обстановки и выработки решений и блока ведения по маршруту, вход-выход которого соединен с входом-выходом блока обработки и маршрутизации данных, входы-выходы которого соединены с входами-выходами блока формирования и передачи ограничений плавания, блока сбора и передачи навигационной обстановки и блока анализа обстановки и выработки решений, который выполнен с возможностью определения маневра безопасного расхождения с окружающими судами согласно основному алгоритму, соответствующему рекомендациям правил МППСС-72, и альтернативному алгоритму, позволяющему снизить вероятность не построения маневра безопасного расхождения с окружающими судами в случае наличия опасной ситуации судовождения.
Сущность заявляемой системы прогнозирования безопасного расхождения судов поясняется примером ее реализации и чертежами, где изображено:
на фиг. 1 - структурная электрическая схема системы;
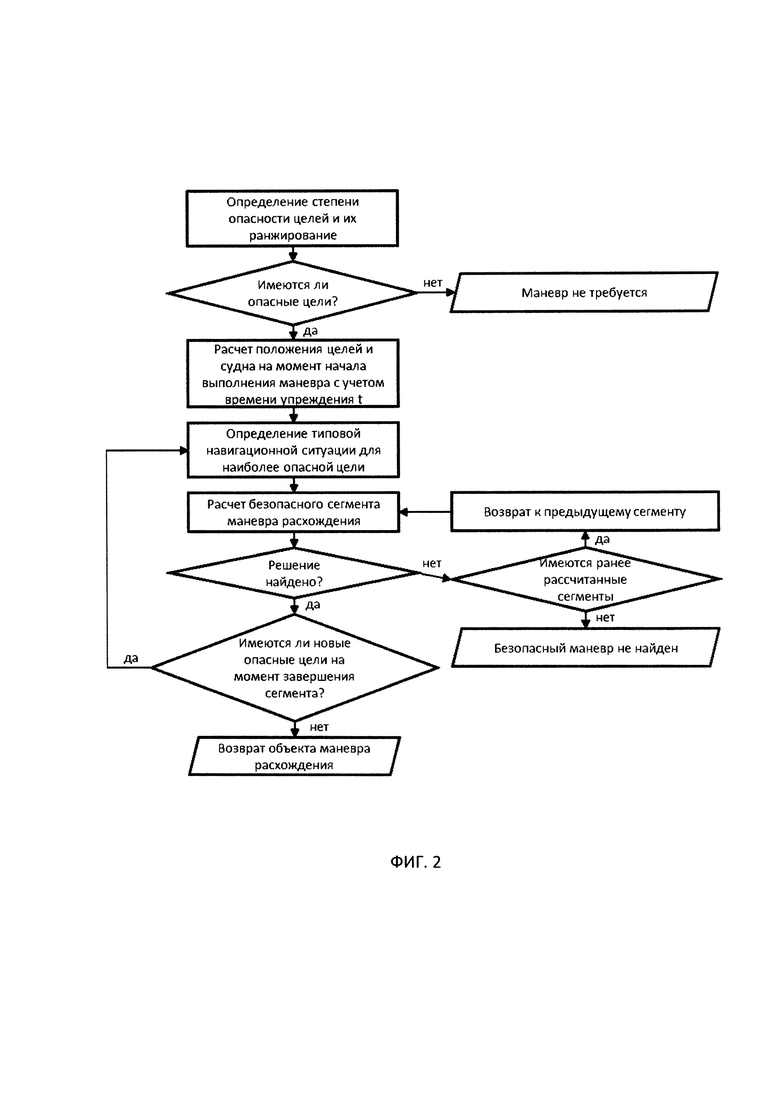
на фиг. 2 - блок-схема основного алгоритма расчета маневра безопасного расхождения судна;
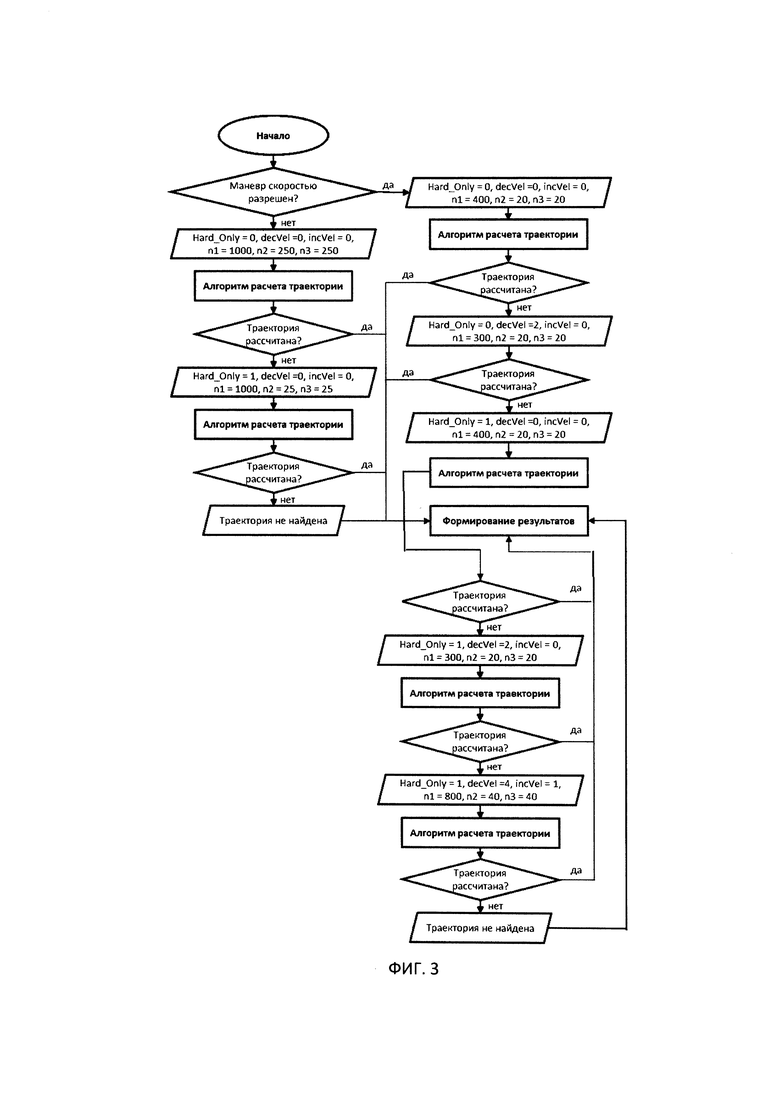
на фиг. 3 - блок-схема альтернативного алгоритма расчета маневра безопасного расхождения судна;
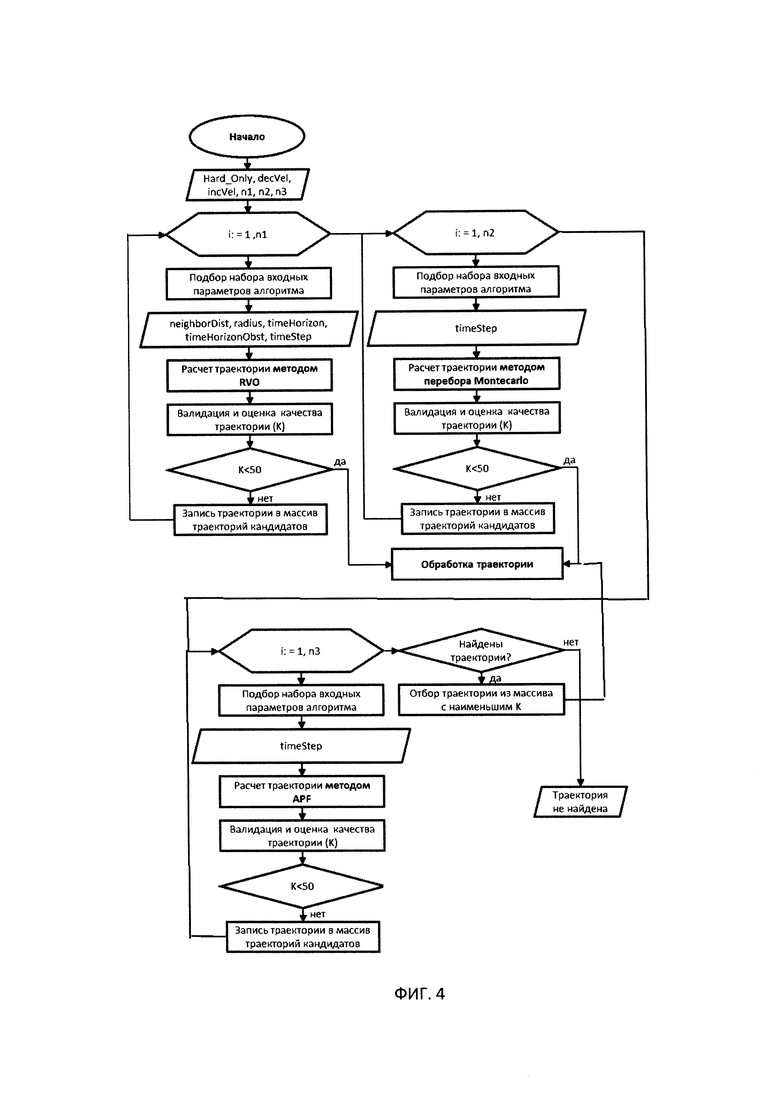
на фиг. 4 - блок-схема алгоритма расчета траектории маневра расхождения судна;
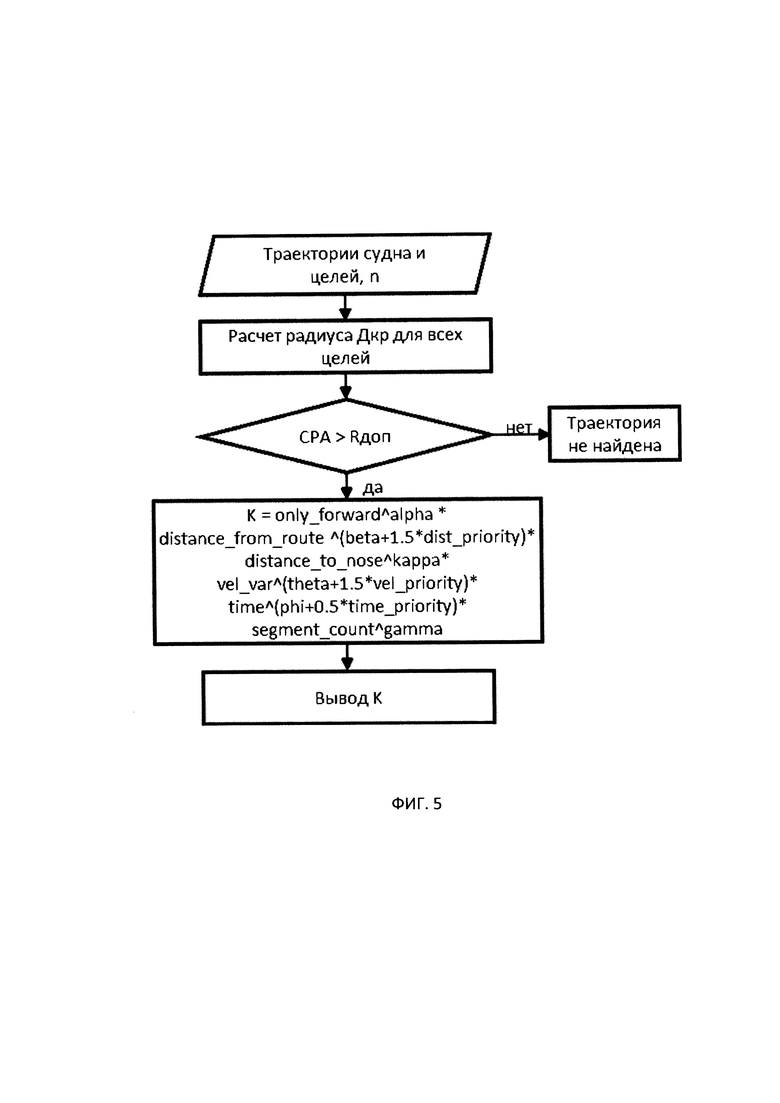
на фиг. 5 - блок-схема алгоритма валидации и оценки качества траекторий маневра расхождения судна.
Система прогнозирования безопасного расхождения судов включает (фиг. 1) блок 1 комплексирования целевой обстановки (БКЦО), блок 2 формирования и передачи ограничений плавания (БФПОП), блок 3 сбора и передачи навигационной обстановки (БСПНО), блок 4 обработки и маршрутизации данных (БОМД), блок 5 анализа обстановки и выработки решений (БАОВР), блок 6 математической модели движения судна (БММДС) и блок 7 ведения по маршруту (БВМ).
Блок 1 комплексирования целевой обстановки предназначен для приема данных о целевой обстановке от обзорно-поисковой системы, радиолокационной станции и автоматической идентификационной системы, формирования и выдачи обобщенной целевой обстановки и представляет собой программно-аппаратный комплекс, реализованный с использованием специализированного программного обеспечения, которое обеспечивает прием, анализ и отказоустойчивую фильтрацию навигационных данных на основе диагностических и отказоустойчивых фильтров Калмана.
Блок 2 формирования и передачи ограничений плавания предназначен для установки и обновления коллекции морских электронных навигационных карт, приема дополнительных данных от сервисов сообщений и запросов на выдачу ограничений от других подсистем, формирования и выдачи ограничений плавания и представляет собой специализированный картографический сервер.
Блок 3 сбора и передачи навигационных данных предназначен для приема данных о положении судна от навигационных датчиков и представляет собой программно-аппаратный комплекс, реализованный с использованием специализированного программного обеспечения.
Блок 4 обработки и маршрутизации данных предназначен для получения, сохранения и перераспределения данных между блоками системы, а также формирования команд тревог, предупреждений и сообщений. Блок представляет собой программно-аппаратный комплекс.
Блок 5 анализа обстановки и выработки решений предназначен для выполнения анализа навигационной обстановки на предмет опасностей плавания, идентификации их в соответствии с требованиями МППСС-72, а также расчета маневра безопасного расхождения с окружающими судами и возвращения на маршрут. Для расчета маневра безопасного расхождения судов используется алгоритм, представляющий собой мультиагентную систему, агенты которой имеют различное функциональное назначение и реализованы в отдельных программных модулях, общая задача которых обеспечить расчет безопасного маневра расхождения судна с учетом навигационной обстановки. В БАОВР 5 реализованы основной (фиг. 2) и альтернативный (фиг. 3) алгоритмы расчета маневра безопасного расхождения судна. Основной алгоритм (фиг. 2) имеет формализованную логику работы, соответствующую рекомендациям правил МППСС-72. Альтернативный алгоритм (фиг. 3), обеспечивающий повышение отказоустойчивости, использует в основе неявные методы расчета траектории движения судна. Блок представляет собой программно-аппаратный комплекс.
Блок 6 математической модели движения судна предназначен для формирования, хранения текущей математической модели движения судна, которая используется для расчета установившихся режимов движения судна в зависимости от его состояния, целевой траектории, а также гидрометеорологической обстановки, и представляет собой программно-аппаратный комплекс, реализованный с использованием специализированного программного обеспечения.
Блок 7 ведения по маршруту обеспечивает соотнесение маршрутных данных (запланированный маршрут, исполняемый маневр или траектория дистанционного управления) и собственных навигационных данных судна, формирование и выдачу уставок в подсистему управления движением, а также команд на подачу звуковых и световых сигналов встречным судам при расхождении с ними. Блок представляет собой программно-аппаратный комплекс, реализованный с использованием специализированного программного обеспечения.
Система работает следующем образом.
Информации от судовых конвенционных систем поступает в БКЦО 1 и БСПНО 3, которая передается в БОМД 4. Из БФПОП 2 ограничения района плавания, определенные по результатам обработки картографической информации, передаются в БОМД 4. В БАОВР 5 из БОМД 4 поступают данные, описывающих навигационную обстановку, текущий маршрут судна, ограничения и рекомендации при построении маршрута (радиус циркуляции, скорости и пр.) и, опционально, текущий исполняемый маневр судна. После обработки этих данных выполняется анализ навигационной обстановки, в рамках которой осуществляется определение степени опасности целей и их ранжирование. Все многообразие возможных навигационных обстановок подразделяются на десять формализованных типовых навигационных ситуаций (ТНС), которые характеризуются различными признаками, вытекающие из взаимных характеристик движения судна и цели, состояния судна, а также погодной обстановки, и является результатом формализации МППСС-72. Для каждой из ТНС определен набор возможных действий судна для совершения маневра расхождения.
В случае отсутствия опасных целей расчет маневра безопасного расхождения с целями не выполняется, а в БАОВР 5 формируется соответствующее информационной сообщение.
В случае обнаружения опасных целей в БАОВР 5 согласно основному алгоритму (фиг. 2) производится расчет маневра расхождения судна с целями, если решение не найдено, то расчет маневра расхождения судна с целями выполняется согласно альтернативному алгоритму (фиг. 3). В БАОВР 5 по основному алгоритму определяется ТНС для наиболее опасной цели, определяющей вариант действия судна, согласно которому производится расчет маневра расхождения судна с целями. При успешном расчете маневра расхождения происходит передача полученных данных в БОМД 4. В случае неудачи расчета варианта маневра расхождения судна с целями для текущей ТНС БАОВР 5 выдает информационное сообщение и выполняет расчет траектории маневра расхождения согласно альтернативному алгоритму (фиг. 3) до тех пор, пока не будет найдена оптимальная для текущей ТНС траектории маневра расхождения.
Принимая на вход итерируемые параметры, в БАОВР 5 запускается цикл (фиг. 4) расчета набора траекторий RVO (reciprocal velocity obstacles), ограниченный предварительно установленным количеством итераций. На каждой итерации случайным образом, в рамках заданного диапазона происходит изменение внутренних параметров алгоритма RVO: neighbourDist; radius; timeHorizon; timeHorizonObst; timeStep.
Параметр neighbourDist, характеризующий максимальную дистанцию, в пределах которой будут учитываться цели при расчете траектории, определяется по формуле:
neighbourDist=2+D1*totalDist,
где D1 - равномерно распределенное случайное число в диапазоне от 0 до 1;
totalDist - общая протяженность маршрута.
Параметр radius, характеризующий радиус агента RVO, то есть расстояние, на которое агент не подпускает к себе других агентов, определяется по формуле:
radius=RADIUS_SEARCH_COEF+D3*RADIUS_SEARCH_RANGE,
где D3 - равномерно распределенное случайное число в диапазоне от 0 до 1;
RADIUS_SEARCH_COEF - аддитивная константа;
RADIUS_SEARCH_RANGE - мультипликативная константа.
Параметр timeHorizon характеризует минимальное количество времени, в течение которого скорости агента, вычисленные с помощью моделирования, безопасны по сравнению с другими агентами. Чем больше это число, тем раньше этот агент отреагирует на присутствие других агентов, но тем меньше у агента свободы выбора скорости движения. Параметр timeHorizon определяется по формуле:
timeHorizon=0.1+D2,
где D2 - равномерно распределенное случайное число в диапазоне от 0 до 1.
Параметр timeHorizonObst характеризует минимальный промежуток времени, в течение которого скорости агента, вычисленные при моделировании, безопасны по отношению к препятствиям. Чем больше это число, тем быстрее этот агент отреагирует на наличие препятствий, но тем меньше у агента свободы выбора скорости. Параметр timeHorizonObst определяется по формуле:
timeHorizonObst=0.2+D5,
где D5 - равномерно распределенное случайное число в диапазоне от 0 до 1.
Параметр timeStep, характеризующий шаг расчета следующей точки траектории по времени, определяется по формуле:
timeStep=DIST_VARIATION*timeDist/(ITERATION_TIME_LIMIT*(0.6+1.5*D4)),
где D4 - равномерно распределенное случайное число в диапазоне от 0 до 1;
timeDist - примерно рассчитанное время движения по маршруту;
DIST_VARIATION и ITERATION_TIME_LIMIT - настраиваемые константы.
В БАОВР 5 осуществляется проверка каждой из построенных траекторий маневра расхождения судна с целями. Проверка производится в соответствии с алгоритмом валидации и оценки качества траекторий маневра расхождения судна (фиг. 5). В случае, если коэффициент качества K<50, то траектория признается оптимальной, и ее параметры из БАОВР 5 передаются в БОМД 4. В противном случае алгоритм продолжает построение траекторий, записывая параметры каждой из тех, что прошли проверку опасного сближения с целями, в массив траекторий. В случае не нахождения траектории с коэффициентом качества K<50 за предварительно установленное количество итераций происходит дальнейший расчет траекторий двумя другими методами. Методом, основанном на методе перебора Monte-Carlo и методом, основанном на APF (artificial potential fields) с перебором единственного параметра timeStep.Если в результате работы этих методов не находится ни единой траектории с K<50, то из всего набора валидных траекторий, записанных в массив, выбирается та, у которой коэффициент качества будет наименьшим, параметры выбранной траектории передаются в БОМД 4.
По результатам обработки готовая траектория из БОМД 4 передается в БВМ 7, который уточняет возможности судна с учетом текущих характеристик, полученных из БММДС 6, и формирует из заданной траектории курс и скорость движения судна в момент времени, с целью соответствия выработанному маневру расхождения.
Заявленное изобретение реализовано на действующем грунтовозе проекта НВ900 и сухогрузе проекта RSD49. Опытная эксплуатация показала, что заявленное изобретение позволяет обеспечить идентификацию навигационной опасности, повышение точности определение оптимального маневра расхождения судна в различных критических ситуациях с учетом МППСС-72 и фактических возможностей маневрирования судна, а также передачу управляющих сигналов в виде курса и скорости для последующей интерпретации в управляющие сигналы для судовых движительных систем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система прогнозирования безопасного расхождения судов | 2022 |
|
RU2780081C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| Способ генерации предварительной прокладки пути судна и устройство для его реализации | 2021 |
|
RU2782617C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| Тренажерный комплекс для подготовки судоводителей | 2017 |
|
RU2657708C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗАВАРИЙНОГО ДВИЖЕНИЯ НАДВОДНОГО ИЛИ ПОДВОДНОГО СУДНА ПРИ НАЛИЧИИ ПОДВОДНЫХ ИЛИ НАДВОДНЫХ ПОТЕНЦИАЛЬНО ОПАСНЫХ ОБЪЕКТОВ | 2012 |
|
RU2513198C2 |
| Система управления техническими средствами и движением МАНС | 2023 |
|
RU2825914C1 |
| Оптико-электронная система преобразования данных изображения в элементы вектора состояния судна | 2023 |
|
RU2808873C1 |
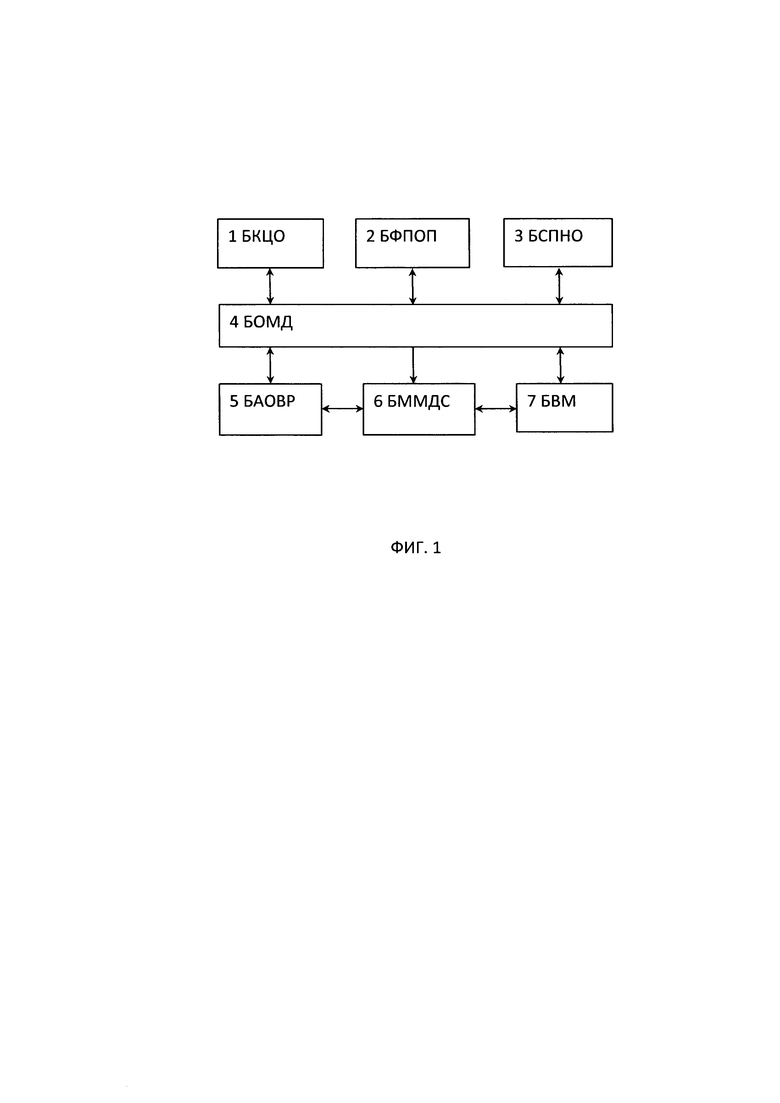
Система прогнозирования безопасного расхождения судов предназначена для обеспечения безопасного расхождения с окружающими судами согласно Международным правилам предупреждения столкновений судов в море (МППСС-72). Система включает блок комплексирования целевой обстановки, блок формирования и передачи ограничений плавания, блок сбора и передачи навигационной обстановки, блок обработки и маршрутизации данных, блок анализа обстановки и выработки решений, блок математической модели движения судна и блок ведения по маршруту. Система обеспечивает повышение точности определения оптимальных маневров расхождения судов, тем самым повышает безопасность судовождения в различных критических ситуациях. 5 ил.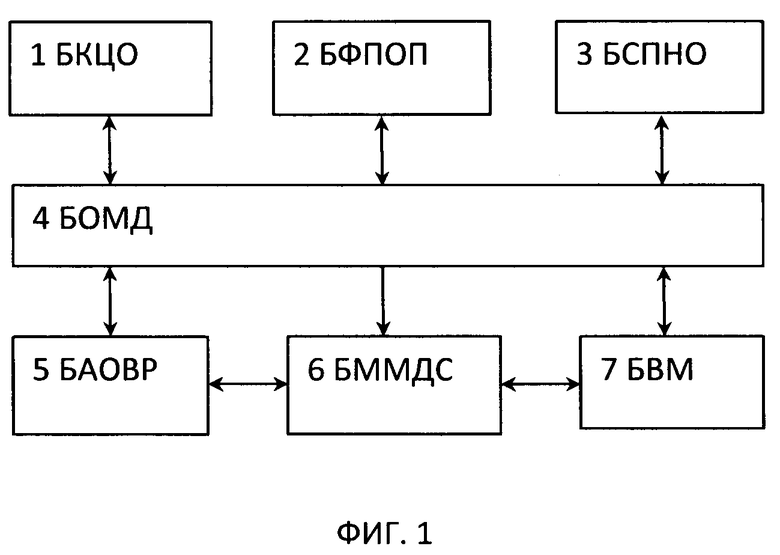
Система прогнозирования безопасного расхождения судов, содержащая блок сбора и передачи навигационной обстановки и блок анализа обстановки и выработки решений, отличающаяся тем, что в состав системы включены блок комплексирования целевой обстановки, блок формирования и передачи ограничений плавания, блок обработки и маршрутизации данных, блок математической модели движения судна и блок ведения по маршруту, причем вход-выход блока комплексирования целевой обстановки соединен с входом-выходом блока обработки и маршрутизации данных, выход которого соединен с входом блока математической модели движения судна, входы-выходы которого соединены с входами-выходами блока анализа обстановки и выработки решений и блока ведения по маршруту, вход-выход которого соединен с входом-выходом блока обработки и маршрутизации данных, входы-выходы которого соединены с входами-выходами блока формирования и передачи ограничений плавания, блока сбора и передачи навигационной обстановки и блока анализа обстановки и выработки решений, который выполнен с возможностью определения маневра безопасного расхождения с окружающими судами согласно основному алгоритму, соответствующему рекомендациям правил МППСС-72, и альтернативному алгоритму, позволяющему снизить вероятность непостроения маневра безопасного расхождения с окружающими судами в случае наличия опасной ситуации судовождения.
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГИДРОДИНАМИЧЕСКИХ ПАРАМЕТРОВ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ДВИЖЕНИЯ СУДНА | 2010 |
|
RU2442718C1 |
| СПОСОБ И СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ СУДНА С ПОМОЩЬЮ НЕЧЕТКОЙ ЛОГИКИ | 2018 |
|
RU2678762C1 |
| JP 2012210875 А, 01.11.2012 | |||
| САМОЦЕНТРИРУЮЩЕЕ ЗАЖИМНОЕ УСТРОЙСТВО | 1994 |
|
RU2088396C1 |

